IDEA StatiCa Detail – Structural design of concrete discontinuities
The theoretical background is based on COMPATIBLE STRESS FIELD DESIGN OF STRUCTURAL CONCRETE
(Kaufmann et al., 2020)
Structural design of concrete discontinuities in IDEA StatiCa Detail
1 Introduction to the CSFM method
1.1 General introduction for the structural design of concrete details
1.2 Main assumptions and limitations
1.3 Design tools for reinforcement
2 Analysis model of IDEA StatiCa Detail
2.1 Introduction to finite element implementation
2.2 Supports and load transmitting components
2.3 Load transfer at trimmed ends of beams
2.4 Geometric modification of cross-sections
2.5 Finite element types
2.6 Meshing
2.7 Solution method and load-control algorithm
2.8 Presentation of results
3 Model verification
3.1 Limit states, crack width calculation, and Tension stiffening
4 Structural verifications according to EUROCODE
4.1 Material models (EN)
4.2 Safety factors
4.3 Ultimate limit state analysis
4.4 Partially loaded areas (PLA)
4.5 Serviceability limit state analysis
5 Structural verifications according to ACI 318-19
5.1 Material models (ACI)
5.2 Strength reduction and load factors
5.3 Strength verifications
5.4 Bearing and anchorage zones - Partially loaded areas
5.5 Serviceability verifications
6 Structural verifications according to AASHTO
6.1 Material models (AASHTO)
6.2 Resistance and load factors
6.3 Strength limit state
6.4 Bearing and anchorage zones resistance – Partially loaded areas
6.5 Service limit state
7 Structural verifications according to AS 3600
7.1 Material models (AUS)
7.2 Stress reduction and load factors
7.3 Strength and anchorage verifications
7.4 Serviceability checks
8 Prestressing in Detail - Model description
1 Introduction to the CSFM method
Obecný úvod pro konstrukční návrh betonových detailů
The design and assessment of concrete elements are normally performed at the sectional (1D-element) or point (2D-element) level. This procedure is described in all standards for structural design, e.g., in (EN 1992-1-1), and it is used in everyday structural engineering practice. However, it is not always known or respected that the procedure is only acceptable in areas where Bernoulli-Navier hypothesis of plane strain distribution applies (referred to as B-regions). The places where this hypothesis does not apply are called discontinuity or disturbed regions (D-Regions). Examples of B and D regions of 1D-elements are given in (Fig. 1). These are, e.g., bearing areas, parts where concentrated loads are applied, locations where an abrupt change in the cross-section occurs, openings, etc. When designing concrete structures, we meet a lot of other D-Regions such as walls, bridge diaphragms, corbels, etc.
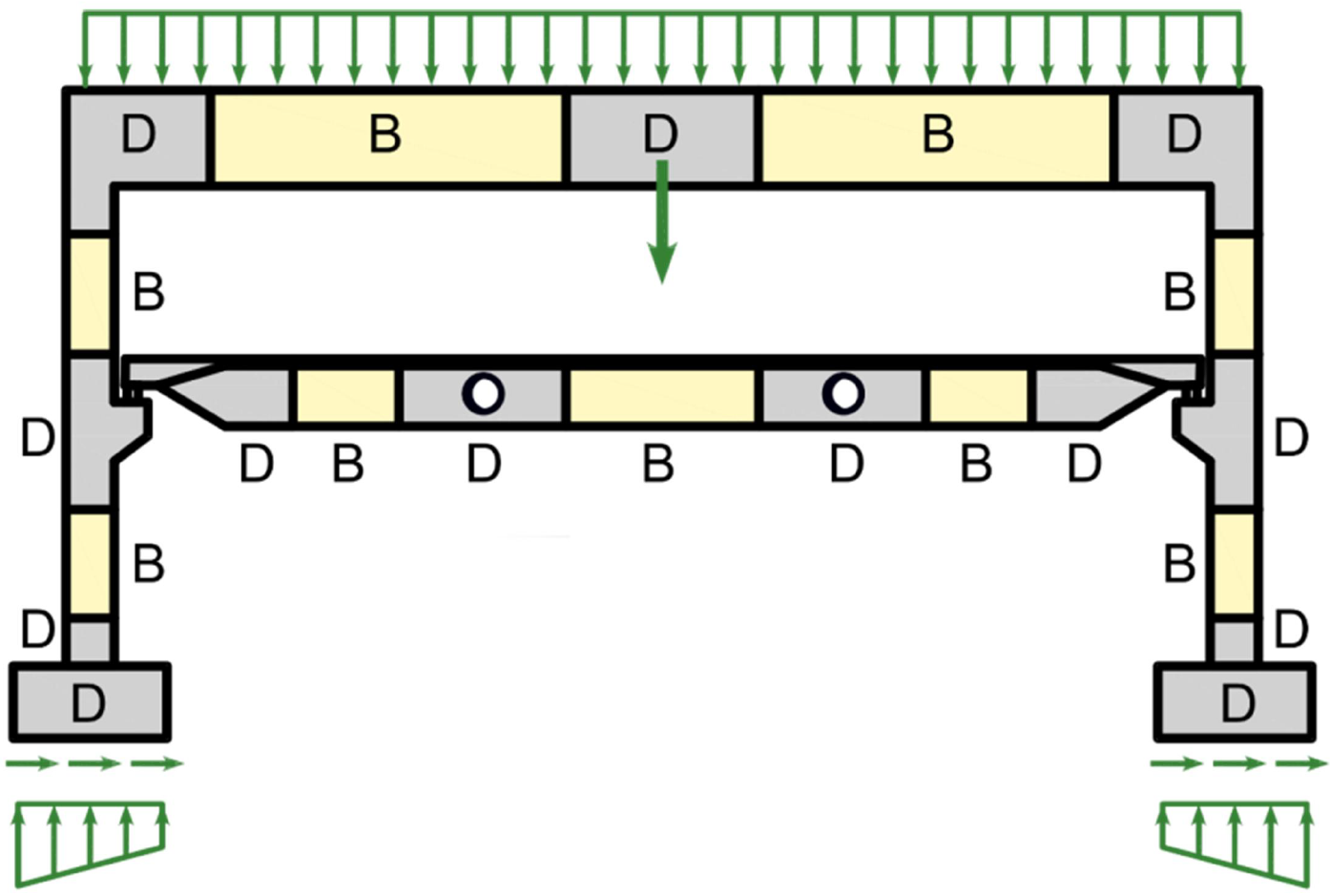
\[ \textsf{\textit{\footnotesize{Fig. 1\qquad Discontinuity regions (Navrátil et al. 2017)}}}\]
In the past, semi-empirical design rules were used for dimensioning discontinuity regions. Fortunately, these rules have been largely superseded over the past decades by strut-and-tie models (Schlaich et al., 1987) and stress fields (Marti 1985), which are featured in current design codes and frequently used by designers today. These models are mechanically consistent and powerful tools. Note that stress fields can generally be continuous or discontinuous and that strut-and-tie models are a special case of discontinuous stress fields.
Despite the evolution of computational tools over the past decades, Strut-and-Tie models are essentially still used as hand calculations. Their application for real-world structures is tedious and time-consuming since iterations are required, and several load cases need to be considered. Furthermore, this method is not suitable for verifying serviceability criteria (deformations, crack widths, etc.).
The interest of structural engineers in a reliable and fast tool to design D-regions led to the decision to develop the new Compatible Stress Field Method, a method for computer-aided stress field design that allows the automatic design and assessment of structural concrete members subjected to in-plane loading.
The Compatible Stress Field Method is a continuous FE-based stress field analysis method in which classic stress field solutions are complemented with kinematic considerations, i.e., the state of strain is evaluated throughout the structure. Hence, the effective compressive strength of concrete can be automatically computed based on the state of transverse strain in a similar manner as in compression field analyses that account for compression softening (Vecchio and Collins 1986; Kaufmann and Marti 1998) and the EPSF method (Fernández Ruiz and Muttoni 2007). Moreover, the CSFM considers tension stiffening, providing realistic stiffnesses to the elements, and covers all design code prescriptions (including serviceability and deformation capacity aspects) not consistently addressed by previous approaches. The CSFM uses common uniaxial constitutive laws provided by design standards for concrete and reinforcement. These are known at the design stage, which allows the partial safety factor method to be used. Hence, designers do not have to provide additional, often arbitrary material properties as are typically required for non-linear FE-analyses, making the method perfectly suitable for engineering practice.
To foster the use of computer-aided stress fields by structural engineers, these methods should be implemented in user-friendly software environments. To this end, the CSFM has been implemented in IDEA StatiCa Detail; a new user-friendly commercial software developed jointly by ETH Zurich and the software company IDEA StatiCa in the framework of the DR-Design Eurostars-10571 project.
1.2 Hlavní předpoklady a omezení CSFM ve 2D
CSFM uvažuje maximální hlavní napětí betonu v tlaku (σc2r) a napětí výztuže (σsr) v trhlinách, přičemž zanedbává pevnost betonu v tahu (σc1r = 0), s výjimkou jejího ztužujícího vlivu na výztuž. Zohlednění tahového zpevnění umožňuje simulovat průměrná přetvoření výztuže (εm). Uvažují se fiktivní, rotující, beznapěťové trhliny, které se otevírají bez skluzu (obr. 2a), a zároveň se bere v úvahu rovnováha v trhlinách spolu s průměrnými přetvořeními výztuže.
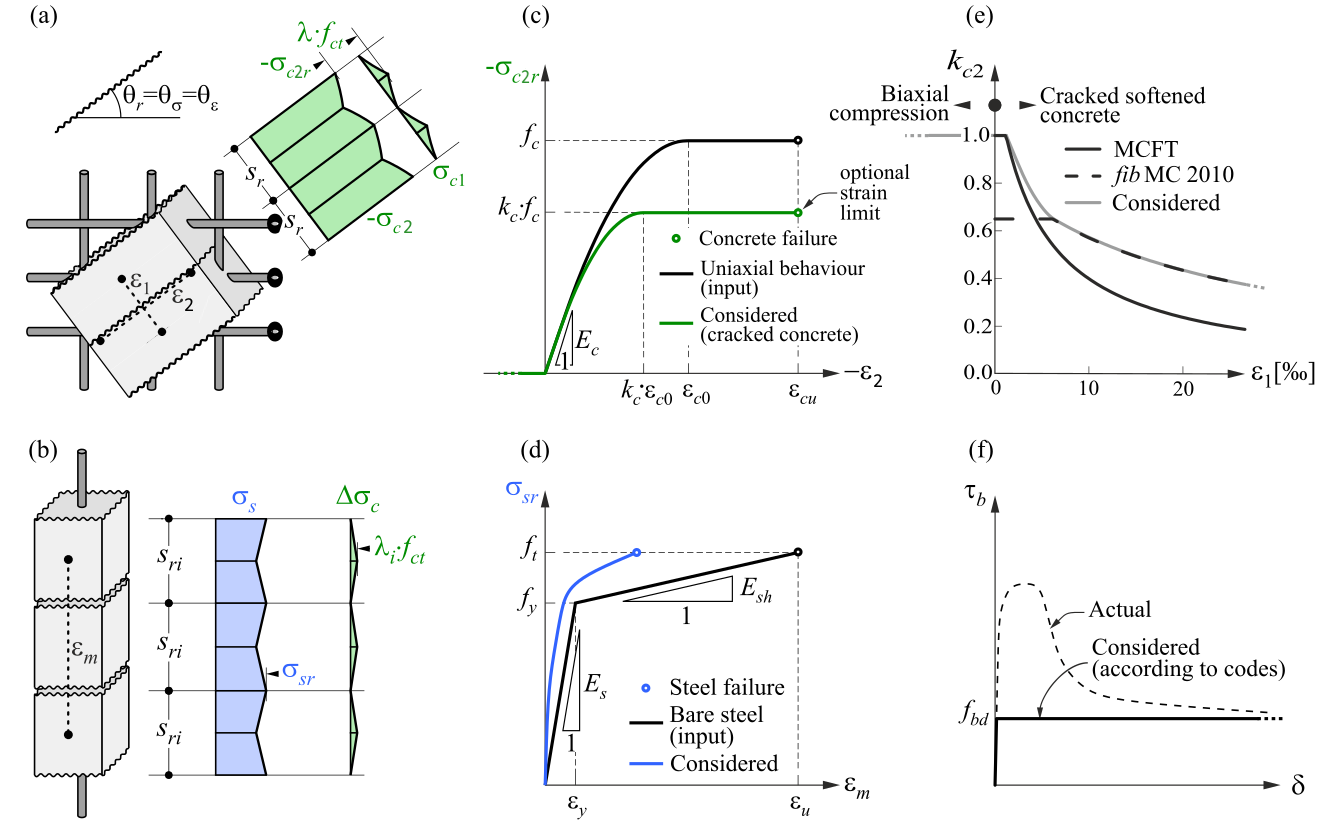
\( \textsf{\textit{\footnotesize{Fig. 2\qquad Basic assumptions of the CSFM: (a) principal stresses in concrete; (b) stresses in the reinforcement direction;}}}\) \( \textsf{\textit{\footnotesize{(c) stress-strain diagram of concrete in terms of maximum stresses with consideration of compression softening;}}}\) \( \textsf{\textit{\footnotesize{(d) stress-strain diagram of reinforcement in terms of stresses at cracks and average strains; (e) compression softening}}}\) \( \textsf{\textit{\footnotesize{law; (f) bond shear stress-slip relationship for anchorage length verifications.}}}\)
Přes svou jednoduchost bylo prokázáno, že podobné předpoklady poskytují přesné výsledky pro vyztužené prvky namáhané v rovině (Kaufmann 1998; Kaufmann a Marti 1998), pokud navržené vyztužení zabraňuje křehkému porušení při vzniku trhlin. Navíc nezohledňování příspěvku pevnosti betonu v tahu k mezní únosnosti je v souladu se zásadami moderních návrhových norem, které jsou z velké části založeny na teorii plasticity.
Nicméně CSFM není vhodná pro štíhlé prvky bez příčného vyztužení, protože relevantní mechanismy pro takové prvky – jako je vzájemné působení kameniva, zbytkové tahové napětí na čele trhliny a kolíkový účinek – které přímo nebo nepřímo závisejí na pevnosti betonu v tahu, jsou zanedbány. Zatímco některé návrhové normy umožňují navrhovat takové prvky na základě poloempirických ustanovení, CSFM není určena pro tento typ potenciálně křehkých konstrukcí.
Beton
Model betonu implementovaný v CSFM je založen na jednoosých tlakových konstitutivních zákonech předepsaných návrhovými normami pro návrh průřezů, které závisí pouze na pevnosti v tlaku. V CSFM se standardně používá diagram parabola-obdélník (obr. 2c), ale projektanti mohou zvolit také zjednodušený elasticko-ideálně plastický vztah. Při posuzování podle normy ACI je možné použít pouze diagram napětí-přetvoření ve tvaru parabola-obdélník. Jak bylo uvedeno výše, pevnost v tahu je zanedbána, stejně jako v klasickém návrhu železobetonu.
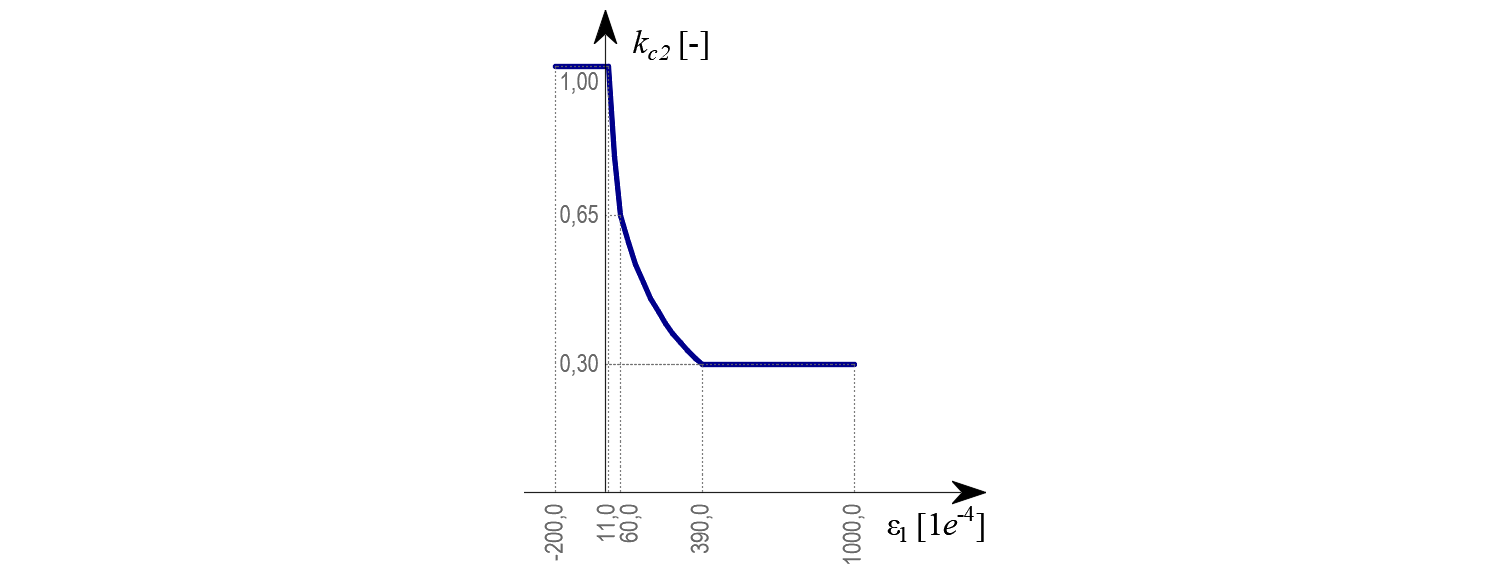
Efektivní pevnost v tlaku je automaticky vyhodnocována pro popraskané betony na základě hlavního tahového přetvoření (ε1) pomocí redukčního součinitele kc2, jak je znázorněno na obr. 2c a e. Implementovaný redukční vztah (obr. 2e) je zobecněním návrhu fib Model Code 2010 pro ověřování smyku, který obsahuje limitní hodnotu 0,65 pro maximální poměr efektivní pevnosti betonu k pevnosti betonu v tlaku, jenž není použitelný pro jiné případy zatížení.
CSFM v IDEA StatiCa Detail neuvažuje explicitní kritérium porušení z hlediska přetvoření betonu v tlaku (tj. uvažuje nekonečně plastickou větev po dosažení vrcholového napětí). Toto zjednodušení neumožňuje ověřit deformační kapacitu konstrukcí porušovaných tlakem. Jejich mezní únosnost je však správně předpovězena, pokud je kromě součinitele popraskaného betonu (kc2) definovaného na (obr. 2e) zohledněn nárůst křehkosti betonu s rostoucí pevností pomocí redukčního součinitele \( \eta_{fc} \) definovaného v fib Model Code 2010 takto:
\[f_{c,red} = k_c \cdot f_{c} = \eta _{fc} \cdot k_{c2} \cdot f_{c}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f_{c}}}}} \right)^{\frac{1}{3}}} \le 1\]
kde:
kc je globální redukční součinitel pevnosti v tlaku
kc2 je redukční součinitel zohledňující přítomnost příčných trhlin
fc je charakteristická válcová pevnost betonu (v MPa pro definici \( \eta_{fc} \)).
Dochází také ke snížení součinitele kc2 z důvodu stability výpočtu. Toto snížení neovlivňuje celkovou únosnost prvků. Při uvažování hodnoty fcd jako součinitelem snížené pevnosti betonu (návrhová hodnota) se hodnota kc2 snižuje podle následujících pravidel.
σc2r < 0,11fcd kc2=1,0
0,11fcd < σc2r < 0,37fcd kc2 je lineární interpolace mezi 1,0 a hodnotou odečtenou z
grafu zobrazeného na obr. 2f
σc2r > 0,37fcd kc2 je přímo odečteno z grafu na obr. 2f
Výztuž
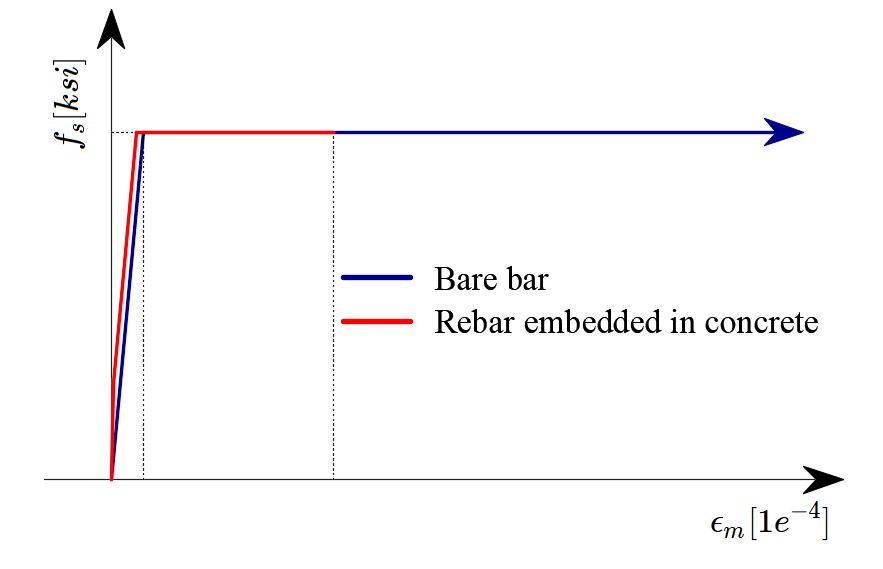
Uvažuje se idealizovaný bilineární diagram napětí-přetvoření pro holé výztužné pruty, který je obvykle definován návrhovými normami (obr. 2d). Definice tohoto diagramu vyžaduje znalost pouze základních vlastností výztuže ve fázi návrhu (pevnost a třída tažnosti). Lze také definovat uživatelsky zadaný vztah napětí-přetvoření.
Tahové zpevnění je zohledněno úpravou vstupního diagramu napětí-přetvoření holého výztužného prutu tak, aby byla zachycena průměrná tuhost prutů zabetonovaných v betonu (εm).
Model soudržnosti
Skluz mezi výztuží a betonem je zaveden do modelu metodou konečných prvků pomocí zjednodušeného tuhého-dokonale plastického konstitutivního vztahu uvedeného na obr. 2f, kde fbd je návrhová hodnota (součinitelem snížená hodnota) mezního napětí v soudržnosti stanovená návrhovou normou pro konkrétní podmínky soudržnosti.
Jedná se o zjednodušený model, jehož jediným účelem je ověřování předpisů pro soudržnost podle návrhových norem (tj. kotvení výztuže). Zkrácení kotevní délky při použití háků, smyček a podobných tvarů prutů lze zohlednit definováním určité únosnosti na konci výztuže, jak bude popsáno dále.
1.3 Návrhové nástroje pro vyztužení
Pracovní postup a cíle
Cílem návrhových nástrojů pro vyztužení v metodě CSFM je pomoci projektantům efektivně určit polohu a požadované množství výztužných prutů. K dispozici jsou následující nástroje, které uživatele v tomto procesu vedou: lineární výpočet a topologická optimalizace.
Návrhové nástroje pro vyztužení používají zjednodušenější konstitutivní modely než modely používané pro závěrečné ověření konstrukce. Proto by návrh vyztužení v tomto kroku měl být považován za předběžný návrh, který je třeba potvrdit/upřesnit v průběhu závěrečného ověřovacího kroku. Použití jednotlivých návrhových nástrojů pro vyztužení bude znázorněno na modelu zobrazeném na obr. 3, který představuje jeden konec prostě podepřeného nosníku s proměnnou výškou zatíženého rovnoměrně rozloženým zatížením.
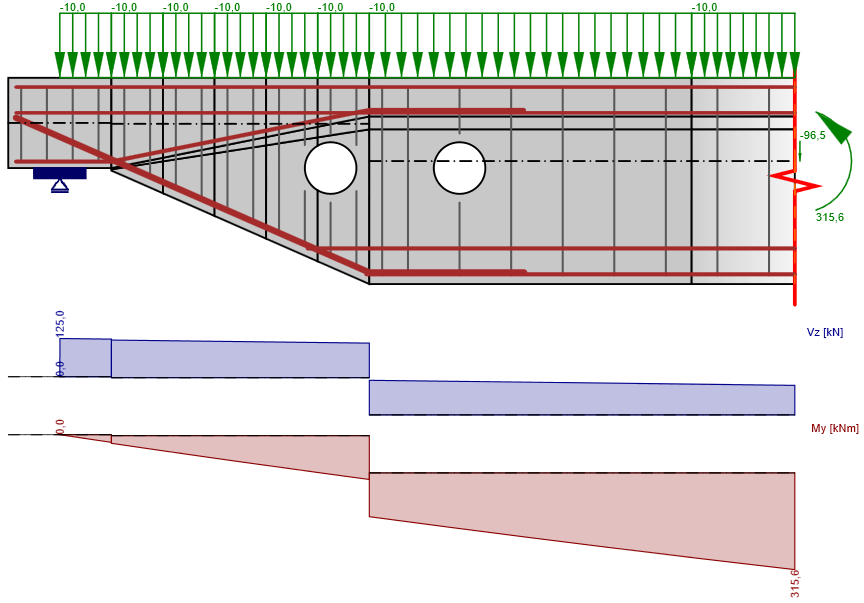
\[ \textsf{\textit{\footnotesize{Fig. 3\qquad Model used to illustrate the use of the reinforcement design tools.}}}\]
Lineární analýza
Lineární analýza uvažuje lineárně elastické vlastnosti materiálu a zanedbává vyztužení v oblasti betonu. Jedná se tedy o velmi rychlý výpočet, který poskytuje první přehled o poloze tahových a tlakových oblastí. Příklad takového výpočtu je znázorněn na obr. 4.
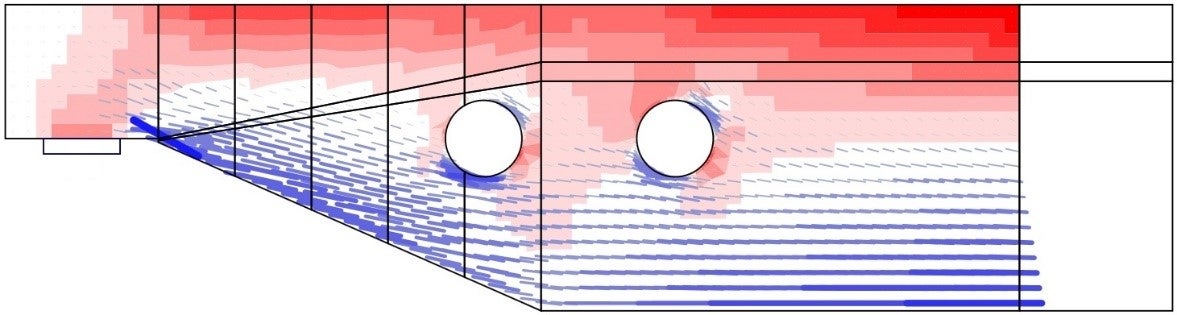
\[ \textsf{\textit{\footnotesize{Fig. 4\qquad Results from the linear analysis tool for defining reinforcement layout}}}\]
\[ \textsf{\textit{\footnotesize{(red: areas in compression, blue: areas in tension).}}}\]
Topologická optimalizace
Topologická optimalizace je metoda, jejímž cílem je nalézt optimální rozložení materiálu v daném objemu pro určitou konfiguraci zatížení. Topologická optimalizace implementovaná v Idea StatiCa Detail využívá lineární model konečných prvků. Každý konečný prvek může mít relativní hustotu od 0 do 100 %, která představuje relativní množství použitého materiálu. Tyto hustoty prvků jsou optimalizačními parametry v optimalizační úloze. Výsledné rozložení materiálu je považováno za optimální pro danou sadu zatížení, pokud minimalizuje celkovou energii přetvoření soustavy. Z definice je optimální rozložení zároveň geometrií s největší možnou tuhostí pro daná zatížení.
Iterační optimalizační proces začíná homogenním rozložením hustoty. Výpočet se provádí pro více hodnot celkového objemového podílu (20 %, 40 %, 60 % a 80 %), což umožňuje uživateli vybrat nejpraktičtější výsledek. Výsledný tvar se skládá z příhradových soustav s tlakovými vzpěrami a táhly a představuje optimální tvar pro dané zatěžovací stavy (obr. 5).
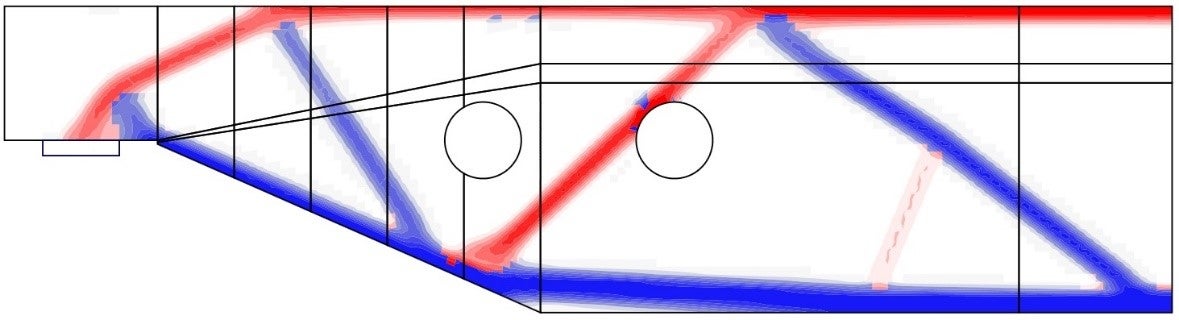
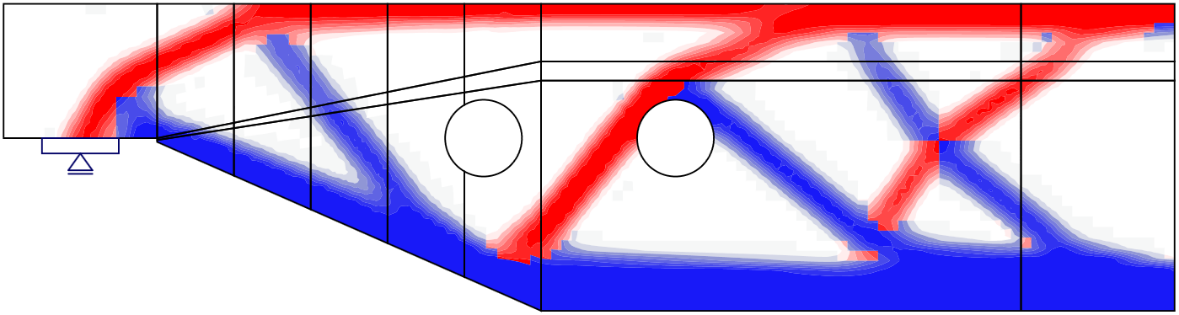
\[ \textsf{\textit{\footnotesize{Fig. 5\qquad Results from the topology optimization design tool with 20\% and 40\% effective volume}}}\]
\[ \textsf{\textit{\footnotesize{(red: areas in compression, blue: areas in tension).}}}\]
2 Analysis model of IDEA StatiCa Detail
2.1 Úvod do implementace metody konečných prvků
CSFM uvažuje spojitá napěťová pole v betonu (2D konečné prvky), doplněná diskrétními prvky „prutů" reprezentujícími vyztužení (1D konečné prvky). Vyztužení tedy není difuzně zabudováno do 2D konečných prvků betonu, ale je explicitně modelováno a propojeno s nimi. Ve výpočetním modelu je uvažován rovinný stav napětí.
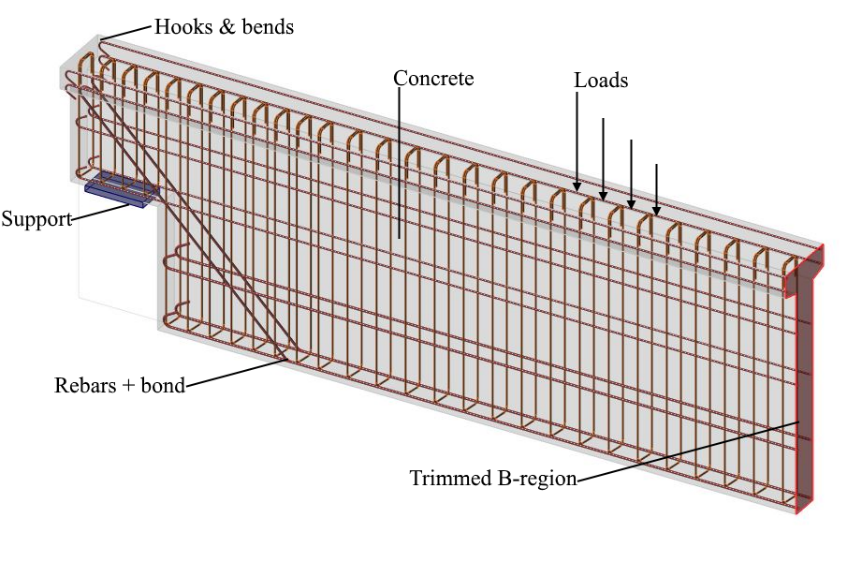
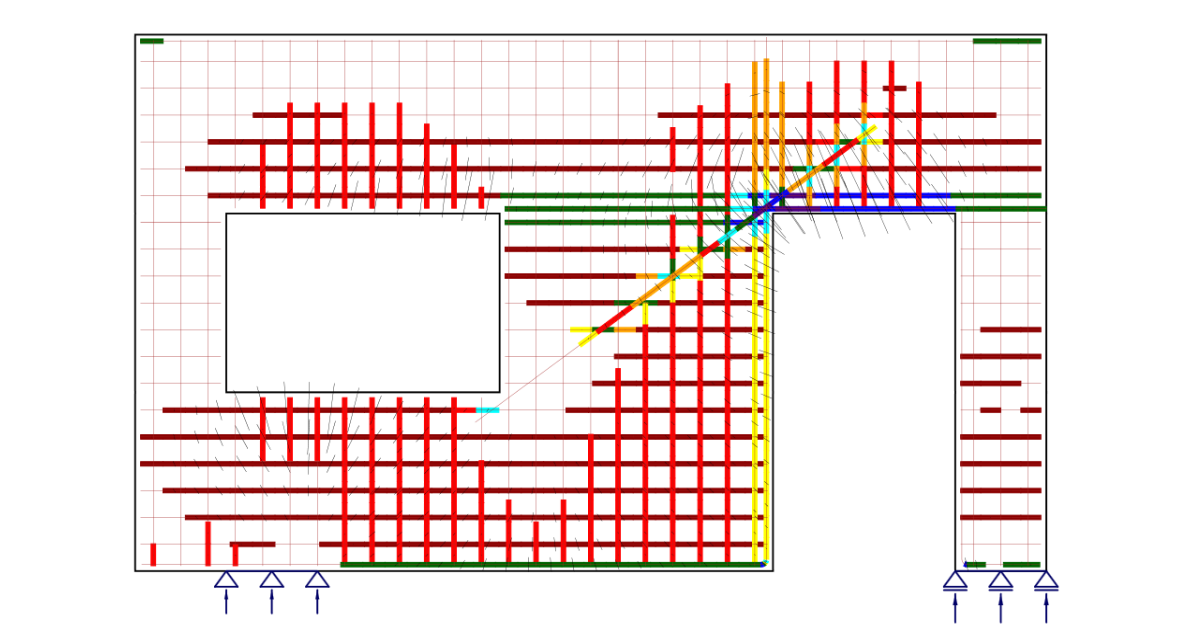
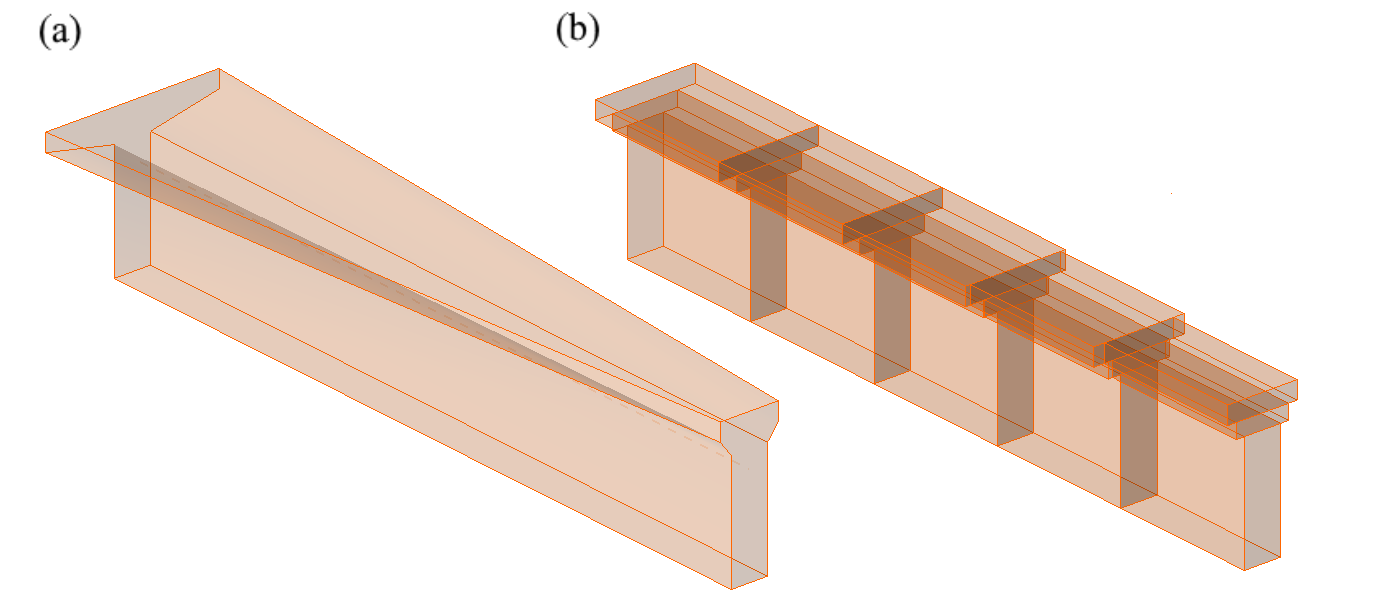
\[ \textsf{\textit{\footnotesize{Fig. 6\qquad Visualization of the calculation model of a structural element (trimmed beam) in Idea StatiCa Detail.}}}\]
Modelovat lze jak celé stěny a nosníky, tak i detaily (části) nosníků (izolovaná oblast nespojitosti, označovaná také jako oříznutý konec). V případě stěn a celých nosníků musí být podpory definovány tak, aby výsledná konstrukce byla (vnějšně) izostatická (staticky určitá) nebo hyperstatická (staticky neurčitá). Přenos zatížení na oříznutých koncích nosníků je zajištěn pomocí speciální přenosové zóny Saint-Venant, která zajišťuje realistické rozdělení napětí v analyzované oblasti detailu.
Supports and load transmitting components
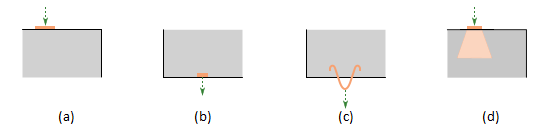
To model most of the situations during the construction process, many types of supports (Fig. 7) and components used for transferring load (Fig. 8) are available in the CSFM.
Supports
Point support can be modeled in several ways to ensure that stresses are not localized in one point but rather distributed over a larger area. The first option is a distributed point support (Fig. 7a), which uniformly distributes the load on the edge of the member over the specified width.

\[ \textsf{\textit{\footnotesize{Fig. 7\qquad Various types of supports:}}}\]
\[ \textsf{\textit{\footnotesize{(a) point distributed; (b) bearing plate; (c) line support; (d) patch support; (e) hanging.}}}\]
Patch support (Fig. 7d), on the other hand, can only be placed inside a volume of concrete with a defined effective radius. It is then connected by rigid elements to the nodes of the reinforcement mesh within this radius. Therefore, it is required to define a reinforcing cage around patch support.
For the more precise modeling of some real scenarios, there are two other options for point support. Firstly, there is point support with a bearing plate of defined width and thickness (Fig. 7b). The material of the bearing plate can be specified, and the whole bearing plate is meshed independently. Secondly, there is hanging support available (Fig. 7e), which can be used for modeling lifting anchors or lifting studs.
Line support (Fig. 7c) can be defined on an edge (by specifying its length) or inside an element (by a polyline). It is also possible to specify its stiffness and/or non-linear behavior (support in compression/tension or only in compression).
- Read detailed descriptions in Types of supports in IDEA StatiCa Detail
Load transmitting components
The introduction of loads into the structure can also be modeled in several ways. For point loads, a bearing plate (Fig. 8a) can be used similarly as point support, distributing the concentrated load onto a larger area thanks to a steel plate with defined width and thickness.
\[ \textsf{\textit{\footnotesize{Fig. 8\qquad Various types of load transfer components:}}}\]
\[ \textsf{\textit{\footnotesize{(a) bearing plate; (b) patch load; (c) hanging; (d) partially loaded area.}}}\]
The point load can be applied either directly to the surface of the structure with a defined radius of action (load is applied to the concrete elements) or via a special transmitting device called patch load (Fig. 8b and Fig. 9). Patch load allows transmitting the load directly to the defined reinforcement located within the area of the effective radius. To secure the correct functionality of the patch load, a group of rebars that will be interconnected with the load is necessary to define (in the reinforcement properties). When the interconnected reinforcement is not defined, the load transfer mechanism is the same as for the point load placed on a member surface, and the load is transferred by the constraints to the concrete elements, not directly to the reinforcement.
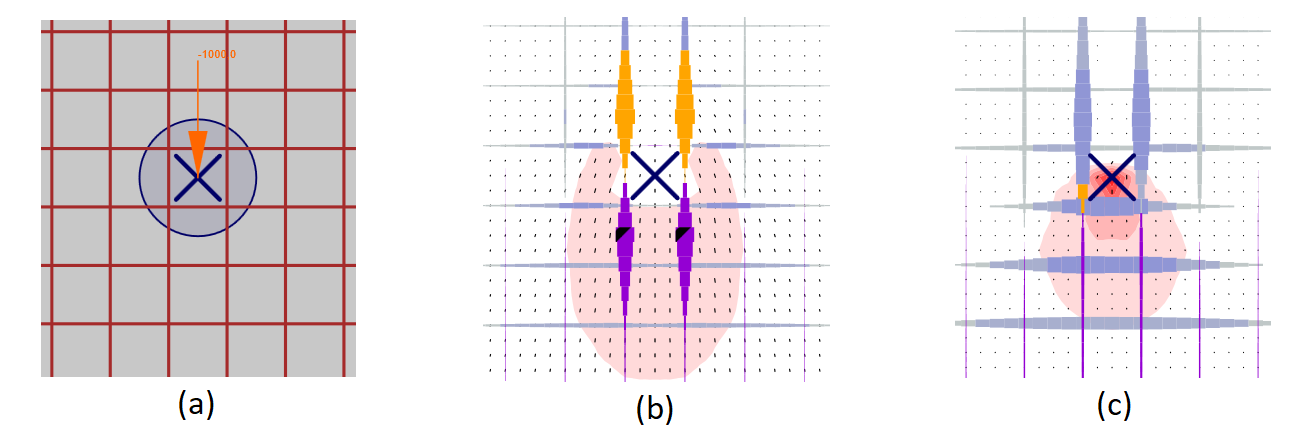
\[ \textsf{\textit{\footnotesize{Fig. 9\qquad Patch load: (a) load application; (b) load transferred through rebars (a group of bars for the load transfer is defined);}}}\]
\[ \textsf{\textit{\footnotesize{(c) load transferred through concrete (a group of bars for the load transfer is not defined).}}}\]
Lifting anchors or lifting studs can be modeled by a hanging load (Fig. 8c). User can use a partially loaded area (Fig. 8d), which allows for increasing the load-bearing capacity of concrete in compression according to Eurocode (it is not possible to use this type of load transmitting component when ACI is set). The structure can also be loaded with line loads on the edges, by general polyline, or by surface loads. The Detail application is able to automatically consider a self-weight in the analysis.
2.3 Přenos zatížení na zkrácených koncích nosníků
V mnoha případech potřebujeme modelovat pouze určitý detail (část) konstrukčního prvku, jako je podpora nosníku, otvor uprostřed nosníku apod. Tento přístup může vést ke konfiguracím podpor, které jsou nestabilní, ale přípustné v IDEA StatiCa Detail (včetně případu bez podpor). V takových případech je však také nutné modelovat průřez představující přípoj k sousední B-oblasti, včetně vnitřních sil v tomto průřezu, které splňují podmínky rovnováhy. V určitých případech (např. při modelování podpory nosníku) mohou být tyto vnitřní síly stanoveny programem automaticky.
Mezi B-oblastí a analyzovanou oblastí nespojitosti je automaticky vytvořena Saint-Venantova přechodová zóna, která zajišťuje realistické rozložení napětí v analyzované oblasti. Šířka přechodové zóny je stanovena jako polovina výšky průřezu. Protože jediným účelem Saint-Venantovy zóny je dosažení správného rozložení napětí ve zbytku modelu, nejsou z této oblasti zobrazovány žádné výsledky při ověřování a nejsou zde uvažována žádná kritéria zastavení výpočtu.
Okraj Saint-Venantovy zóny, který představuje zkrácený konec nosníku, je modelován jako tuhý, tj. může se otáčet, ale musí zůstat rovinný. Toho je dosaženo propojením všech uzlů MKP na okraji s odděleným uzlem v těžišti průřezu pomocí prvku tuhého tělesa (RBE2). Vnitřní síly prvku mohou být poté aplikovány v tomto uzlu, jak je znázorněno na obr. 10.
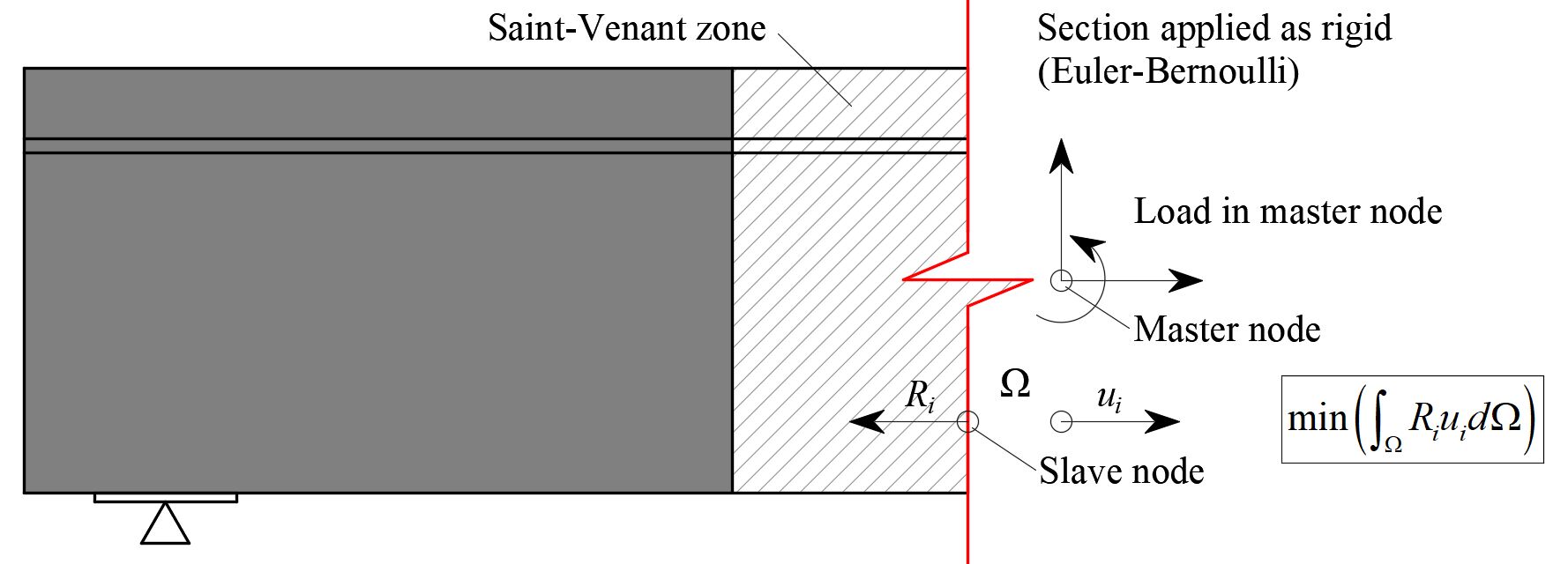
\[ \textsf{\textit{\footnotesize{Fig. 10\qquad Transfer of internal forces at a trimmed end.}}}\]
2.4 Geometrická úprava průřezů
Redukce průřezu se automaticky provádí pro konstrukce definované jako nosník nebo rámový styčník (definovaný osou x a průřezem). Tato úprava se automaticky aplikuje na průřezy s velmi širokými pásnicemi (obr. 11) a vychází z předpokladu, že pole tlakových napětí se bude šířit od stěny pod úhlem 45°, takže výše uvedená redukovaná šířka představuje maximální šířku schopnou přenášet zatížení.
Je třeba poznamenat, že metoda stanovení účinné šířky pásnice implementovaná v CSFM se liší od metody uvedené v 5.3.2.1 EN 1992-1-1 (2015) nebo v 9.2.4.4 ACI 318-19. Kromě geometrie je účinná šířka pásnice podle Eurokódu explicitně ovlivněna délkami polí a okrajovými podmínkami konstrukce.
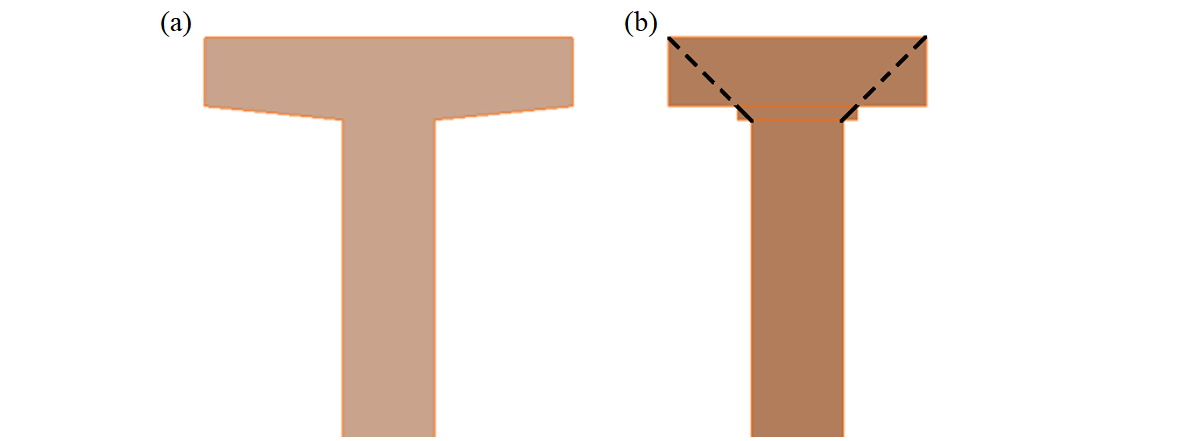
\[ \textsf{\textit{\footnotesize{Fig. 11\qquad Width reduction of a cross-section: (a) user input; (b) FE model – automatically determined reduced flange width.}}}\]
V případě náběhů ležících ve vodorovné rovině (obr. 12) je každý náběh rozdělen podél své délky do pěti úseků. Každý z těchto úseků je pak modelován jako stěna s konstantní tloušťkou, která se rovná skutečné tloušťce uprostřed příslušného úseku.
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Horizontal haunch: (a) user input; (b) FE model – a haunch automatically divided into five sections.}}}\]
2.5 Typy konečných prvků
Nelineární (inelastický) model analýzy metodou konečných prvků je tvořen několika typy konečných prvků používaných k modelování betonu, vyztužení a soudržnosti mezi nimi. Prvky betonu a vyztužení jsou nejprve samostatně síťovány a poté vzájemně propojeny pomocí vícebodových vazeb (prvky MPC). To umožňuje, aby vyztužení zaujímalo libovolnou relativní polohu vůči betonu. Pokud má být provedeno ověření kotevní délky, jsou mezi vyztužení a prvky MPC vloženy prvky soudržnosti a kotevní pružinové prvky.
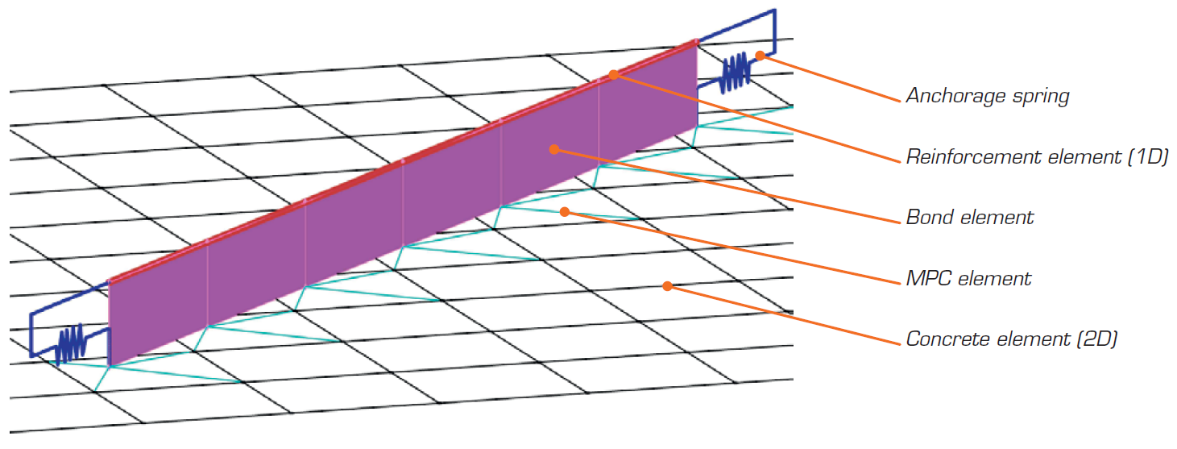
\[ \textsf{\textit{\footnotesize{Fig. 13\qquad Finite element model: reinforcement elements mapped to concrete mesh using MPC elements and bond elements.}}}\]
Beton
Beton je modelován čtyřúhelníkovými a trojúhelníkovými skořepinovými prvky CQUAD4 a CTRIA3. Ty jsou definovány čtyřmi, resp. třemi uzly. V těchto prvcích se předpokládá pouze rovinná napjatost, tj. napětí ani přetvoření ve směru osy z nejsou uvažována.
Každý prvek má čtyři nebo tři integrační body umístěné přibližně v 1/4 jeho rozměru. V každém integračním bodě každého prvku jsou vypočteny směry hlavních přetvoření α1, α2. V obou těchto směrech jsou hlavní napětí σc1, σc2 a tuhosti E1, E2 vyhodnoceny podle zadaného diagramu napětí-přetvoření betonu, viz obr. 2. Je třeba poznamenat, že vliv efektu tlakového změkčení spojuje chování hlavního tlakového směru se skutečným stavem druhého hlavního směru.
Vyztužení
Pruty jsou modelovány dvouuzlovými 1D „prutovými" prvky (CROD), které mají pouze osovou tuhost. Tyto prvky jsou spojeny se speciálními prvky „soudržnosti", které byly vyvinuty za účelem modelování chování prokluzu mezi výztuží a okolním betonem. Tyto prvky soudržnosti jsou následně propojeny prvky MPC (vícebodová vazba) se sítí reprezentující beton. Tento přístup umožňuje nezávislé síťování vyztužení a betonu, přičemž jejich vzájemné propojení je zajištěno dodatečně.
Prvky soudržnosti
Kotevní délka je ověřována zahrnutím smykových napětí soudržnosti mezi prvky betonu (2D) a prvky výztuže (1D) do modelu metodou konečných prvků. Za tímto účelem byl vyvinut typ konečného prvku „soudržnosti".
Definice prvku soudržnosti je podobná definici skořepinového prvku (CQUAD4). Je také definován 4 uzly, ale na rozdíl od skořepiny má nenulovou tuhost pouze ve smyku mezi dvěma horními a dvěma dolními uzly. V modelu jsou horní uzly spojeny s prvky reprezentujícími vyztužení a dolní uzly s prvky reprezentujícími beton. Chování tohoto prvku je popsáno napětím soudržnosti τb jako bilineární funkcí prokluzu mezi horními a dolními uzly δu, viz obr. 14.
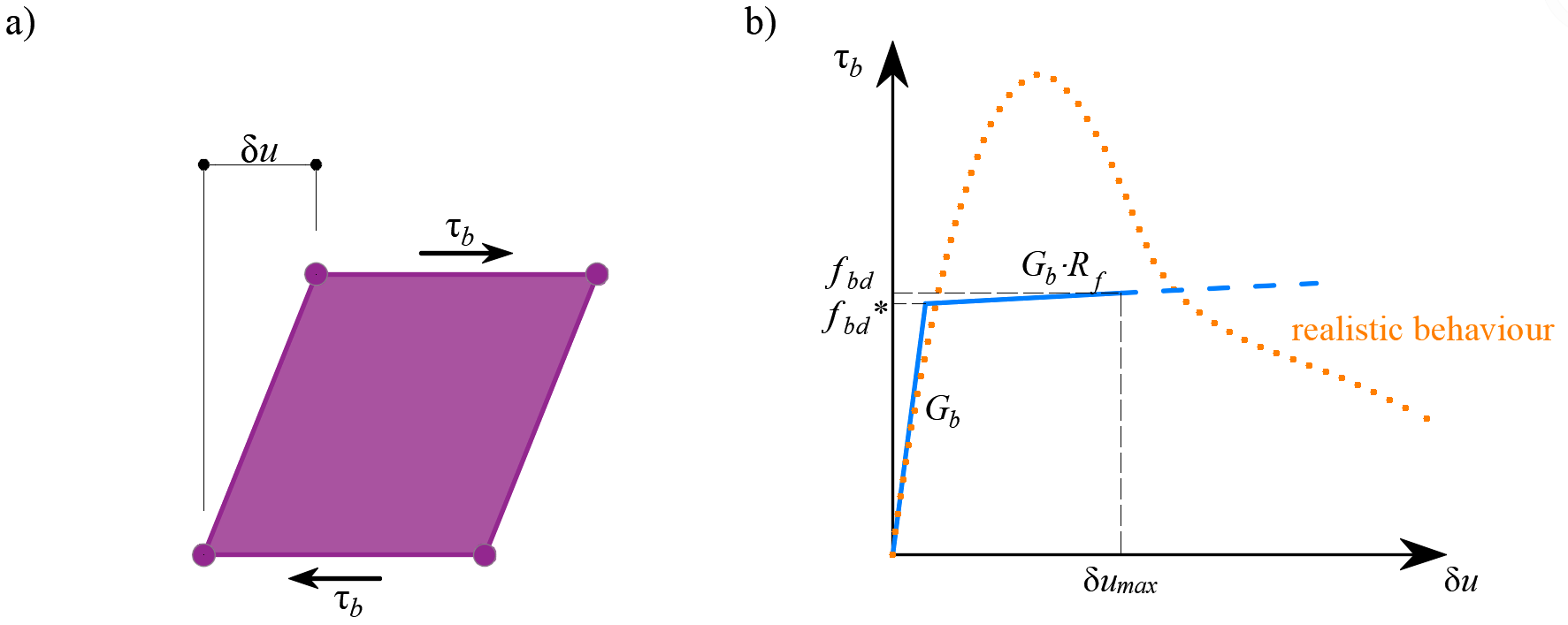
\[ \textsf{\textit{\footnotesize{Fig. 14\qquad (a) conceptual illustration of the deformation of a bond element; (b) a stress-deformation function.}}}\]
Modul pružné tuhosti vztahu soudržnost-prokluz Gb je definován takto:
\[G_b = k_g \cdot \frac{E_c}{Ø}\]
kde:
kg součinitel závisející na povrchu prutu výztuže (výchozí hodnota kg = 0,2)
Ec modul pružnosti betonu (v případě EN uvažován jako Ecm)
Ø průměr prutu výztuže
Návrhové hodnoty (výpočtové hodnoty) mezního smykového napětí soudržnosti fbd uvedené v příslušných vybraných návrhových normách EN 1992-1-1 nebo ACI 318-19 jsou použity k ověření kotevní délky. Zpevnění plastické větve je výchozím nastavením vypočteno jako Gb/105.
Kotevní pružina
Opatření konců výztuže kotvením (tj. ohyby, háky, smyčkami…), které splňuje požadavky návrhových norem, umožňuje zkrácení základní kotevní délky prutů (lb,net) o určitý součinitel β (dále označovaný jako „kotevní součinitel"). Návrhová hodnota kotevní délky (lb) se pak vypočte takto:
\[l_b = \left(1 - \beta\right)l_{b,net}\]
Zamýšlené zkrácení lb,net odpovídá aktivaci prutu výztuže na jeho konci při procentuálním podílu jeho maximální únosnosti daném součinitelem redukce kotvení, jak je znázorněno na obr. 15a.

\[ \textsf{\textit{\footnotesize{Fig. 15\qquad Model for the reduction of the anchorage length:}}}\]
\[ \textsf{\textit{\footnotesize{(a) anchorage force along the anchorage length of the reinforcing bar; (b) slip-anchorage force constitutive relationship.}}}\]
Zkrácení kotevní délky je zahrnuto v modelu metodou konečných prvků pomocí pružinového prvku na konci prutu (obr. 15), který je definován konstitutivním modelem znázorněným na obr. 15b. Maximální síla přenášená touto pružinou (Fau) je:
\[F_{au} = \beta \cdot A_s \cdot f_{yd}\]
kde:
β kotevní součinitel závislý na typu kotvení,
As průřez prutu výztuže,
fyd návrhová hodnota (výpočtová hodnota) meze kluzu vyztužení.
2.6 Síť
Konečné prvky jsou implementovány interně a analytický model je generován automaticky bez nutnosti odborné interakce uživatele. Důležitou součástí tohoto procesu je tvorba sítě.
Beton
Všechny betonové prvky jsou síťovány společně. Doporučená velikost prvku je automaticky vypočtena aplikací na základě velikosti a tvaru konstrukce s přihlédnutím k průměru největšího prutu vyztužení. Doporučená velikost prvku navíc zaručuje, že v tenkých částech konstrukce, jako jsou štíhlé sloupy nebo tenké desky, budou vygenerovány minimálně 4 prvky, aby byly v těchto oblastech zajištěny spolehlivé výsledky. Maximální počet betonových prvků je omezen na 5000, tato hodnota je však dostatečná pro zajištění doporučené velikosti prvku u většiny konstrukcí. Projektanti mohou vždy zvolit uživatelsky definovanou velikost betonového prvku úpravou násobitele výchozí velikosti sítě.
Vyztužení
Vyztužení je rozděleno do prvků přibližně stejné délky, jaká je velikost betonového prvku. Po vygenerování sítí vyztužení a betonu jsou tyto sítě vzájemně propojeny prvky soudržnosti, jak je znázorněno na obr. 13.
Nosné plechy
Pomocné konstrukční části, jako jsou nosné plechy, jsou síťovány samostatně. Velikost těchto prvků se vypočítá jako 2/3 velikosti betonových prvků v oblasti přípoje. Uzly sítě nosného plechu jsou poté propojeny s hraničními uzly betonové sítě pomocí interpolačních prvků podpory (RBE3).
Zatížení a podpory
Plošná zatížení a plošné podpory jsou připojeny pouze k vyztužení, jak je znázorněno na obr. 16. Proto je nutné definovat vyztužení v jejich okolí. Připojení ke všem uzlům vyztužení v rámci efektivního poloměru je zajištěno prvky RBE3 se stejnou vahou.
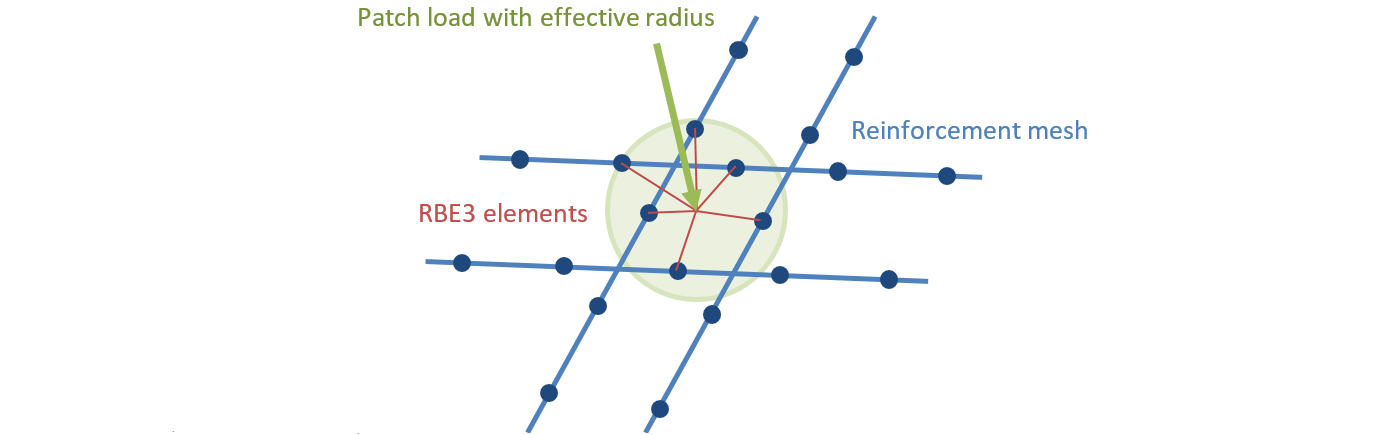
\[ \textsf{\textit{\footnotesize{Fig. 16\qquad Patch load mapping to reinforcement mesh.}}}\]
Liniové podpory a liniová zatížení jsou připojeny k uzlům betonové sítě pomocí prvků RBE3 na základě zadané šířky nebo efektivního poloměru. Váha připojení je nepřímo úměrná vzdálenosti od podpory nebo impulzu zatížení.
- Více informací o propojení jednotlivých zatížení a sítě naleznete v Obecném popisu impulzů zatížení v aplikaci Detail
2.7 Metoda řešení a algoritmus řízení zatížení
Pro nalezení řešení nelineárního problému metodou konečných prvků je použit standardní plný algoritmus Newton-Raphson (NR).
Obecně platí, že algoritmus NR příliš často nekonverguje, je-li plné zatížení aplikováno v jediném kroku. Obvyklým přístupem, který je použit i zde, je postupné přikládání zatížení v několika přírůstcích, přičemž výsledek předchozího přírůstku zatížení slouží jako výchozí bod pro Newtonovo řešení následujícího přírůstku. Za tímto účelem byl nad Newton-Raphsonem implementován algoritmus řízení zatížení. V případě, že iterace NR nekonvergují, je aktuální přírůstek zatížení snížen na polovinu a iterace NR jsou zopakovány.
Druhým účelem algoritmu řízení zatížení je nalezení kritického zatížení, které odpovídá určitým „kritériím zastavení" – konkrétně maximálnímu přetvoření v betonu, maximálnímu prokluzu v prvcích soudržnosti, maximálnímu přemístění v kotvicích prvcích a maximálnímu přetvoření ve výztuži. Kritické zatížení je nalezeno metodou bisekce. V případě, že je kritérium zastavení kdekoliv v modelu překročeno, jsou výsledky posledního přírůstku zatížení zahozeny a je vypočten nový přírůstek o poloviční velikosti oproti předchozímu. Tento postup se opakuje, dokud není kritické zatížení nalezeno s určitou tolerancí chyby.
Pro beton bylo kritérium zastavení nastaveno na přetvoření 5 % v tlaku (tj. přibližně o řád větší než skutečné mezní přetvoření betonu při porušení) a 7 % v tahu v integračních bodech skořepinových prvků. V tahu byla hodnota nastavena tak, aby bylo možné nejprve dosáhnout mezního přetvoření výztuže, které je obvykle přibližně 5 % bez zohlednění tahového zpevnění. V tlaku byla hodnota zvolena z několika alternativ jako dostatečně velká, aby byly účinky drcení betonu patrné ve výsledcích, avšak dostatečně malá, aby nezpůsobovala příliš mnoho problémů s numerickou stabilitou.
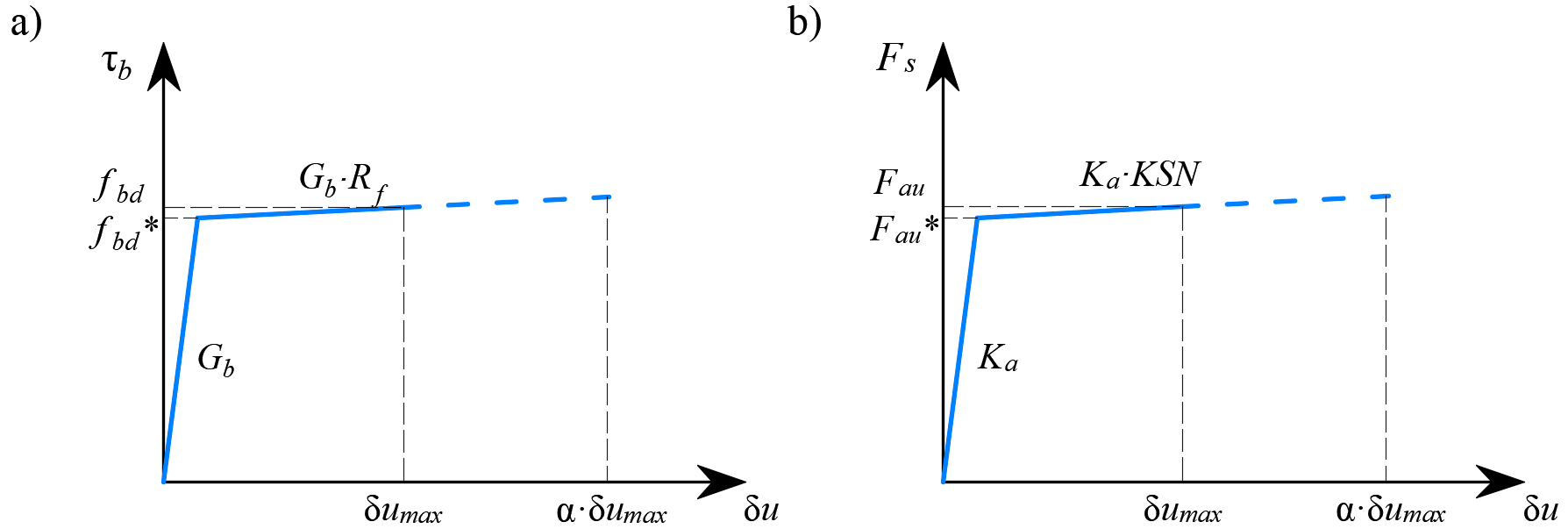
\[ \textsf{\textit{\footnotesize{Fig. 17\qquad Constitutive relationship of bond and anchorage elements used for anchorage length verification:}}}\]
\[ \textsf{\textit{\footnotesize{(a) bond shear stress slip response of a bond element; (b) force-displacement response of an anchorage element.}}}\]
Pro výztuž je kritérium zastavení definováno z hlediska napětí. Protože jsou modelována napětí v trhlině, odpovídá kritérium v tahu pevnosti výztuže v tahu se zohledněním součinitele bezpečnosti. Stejná hodnota je použita pro kritérium v tlaku.
Kritérium zastavení v prvcích soudržnosti a kotvicích pružinách je α·δumax, kde δumax je maximální prokluz použitý při normovém posouzení a α = 10.
2.8 Prezentace výsledků
Výsledky jsou prezentovány samostatně pro beton a pro prvky vyztužení. Hodnoty napětí a přetvoření v betonu jsou vypočítány v integračních bodech skořepinových prvků. Protože prezentace dat tímto způsobem není praktická, jsou výsledky standardně prezentovány v uzlech, například jako maximální hodnota tlakového napětí z přilehlých Gaussových integračních bodů v propojených prvcích (obr. 18). Je třeba poznamenat, že tato reprezentace může lokálně podhodnocovat výsledky na tlačených okrajích prvků v případě, kdy je velikost konečného prvku podobná hloubce tlačené zóny.
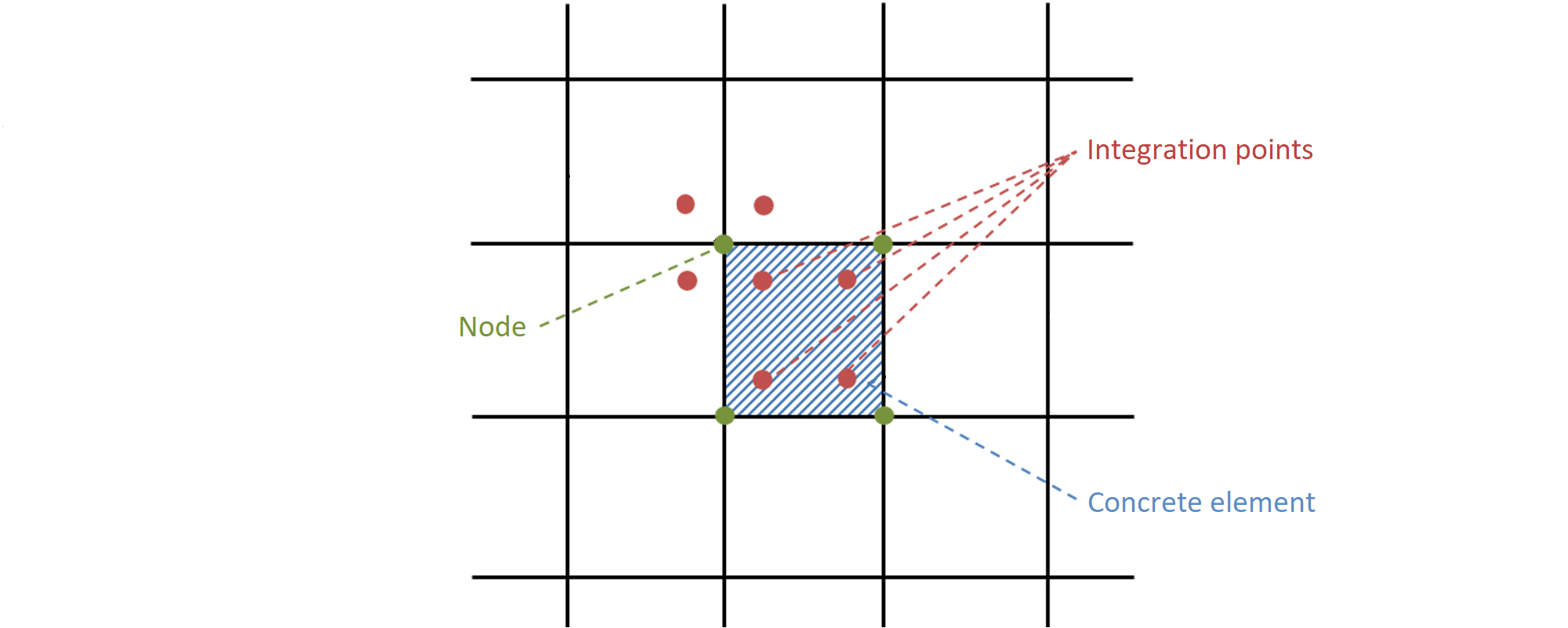
Obr. 18 – Konečný prvek betonu s integračními body a uzly: prezentace výsledků pro beton v uzlech a v konečných prvcích.
Výsledky pro konečné prvky vyztužení jsou buď konstantní pro každý prvek (jedna hodnota – např. pro napětí v oceli), nebo lineární (dvě hodnoty – pro výsledky soudržnosti). Pro pomocné prvky, jako jsou prvky nosných plechů, jsou prezentovány pouze deformace.
3 Model verification
3.1 Mezní stavy a výpočet šířky trhlin
Posouzení konstrukce pomocí CSFM se provádí dvěma různými analýzami: jednou pro kombinace zatížení v mezním stavu použitelnosti a jednou pro kombinace zatížení v mezním stavu únosnosti. Analýza použitelnosti předpokládá, že mezní chování prvku je vyhovující a podmínky plasticity materiálu nebudou při úrovních zatížení v mezním stavu použitelnosti dosaženy. Tento přístup umožňuje použití zjednodušených konstitutivních modelů (s lineární větví diagramu napětí-přetvoření betonu) pro analýzu použitelnosti za účelem zvýšení numerické stability a rychlosti výpočtu. Proto se doporučuje použít níže uvedený postup, ve kterém je analýza mezního stavu únosnosti provedena jako první krok.
Analýza mezního stavu únosnosti
Různá ověření požadovaná konkrétními návrhových normami jsou posuzována na základě přímých výsledků poskytnutých modelem. Ověření MSÚ se provádí pro pevnost betonu, pevnost vyztužení a kotvení (smykové napětí v soudržnosti).
Aby bylo zajištěno efektivní navržení konstrukčního prvku, důrazně se doporučuje provést předběžnou analýzu, která zohledňuje následující kroky:
- Zvolte výběr nejkritičtějších kombinací zatížení.
- Vypočítejte pouze kombinace zatížení v mezním stavu únosnosti (MSÚ).
- Použijte hrubou síť (zvýšením násobitele výchozí velikosti sítě v Nastavení (Obr. 19)).

\[ \textsf{\textit{\footnotesize{Fig. 19\qquad Mesh multiplier.}}}\]
Takový model se vypočítá velmi rychle, což umožňuje projektantům efektivně přezkoumat detailování konstrukčního prvku a opakovaně spouštět analýzu, dokud nejsou splněny všechny požadavky na ověření pro nejkritičtější kombinace zatížení. Jakmile jsou splněny všechny požadavky na ověření této předběžné analýzy, doporučuje se zahrnout úplné kombinace mezního zatížení a použít jemnou velikost sítě (velikost sítě doporučenou programem). Uživatel může změnit velikost sítě pomocí násobitele, který může nabývat hodnot od 0,5 do 5 (Obr. 19).
Základní výsledky a ověření (napětí, přetvoření a využití (tj. vypočtená hodnota/limitní hodnota z normy), jakož i směr hlavních napětí v případě betonových prvků) jsou zobrazeny pomocí různých grafů, kde tlak je obecně zobrazen červeně a tah modře. Globální minimální a maximální hodnoty pro celou konstrukci mohou být zvýrazněny, stejně jako minimální a maximální hodnoty pro každou uživatelem definovanou část. Na samostatné záložce programu lze zobrazit pokročilé výsledky, jako jsou hodnoty tenzorů, deformace konstrukce a stupně vyztužení (efektivní a geometrické) použité pro výpočet tahového zpevnění výztužných prutů. Dále lze zobrazit zatížení a reakce pro vybrané kombinace nebo zatěžovací stavy.
Analýza mezního stavu použitelnosti
Posouzení MSP se provádí pro omezení napětí, šířku trhlin a limity průhybů. Napětí jsou ověřována v betonových a výztužných prvcích podle příslušné normy podobným způsobem, jako je stanoveno pro MSÚ.
Analýza použitelnosti obsahuje určitá zjednodušení konstitutivních modelů, které jsou používány pro analýzu mezního stavu únosnosti. Předpokládá se dokonalá soudržnost, tj. kotevní délka není ověřována při mezním stavu použitelnosti. Dále je zanedbána plastická větev křivky napětí-přetvoření betonu v tlaku, zatímco elastická větev je lineární a nekonečná. Tato zjednodušení zvyšují numerickou stabilitu a rychlost výpočtu a nesnižují obecnost řešení, pokud jsou výsledné limity napětí materiálu při použitelnosti zřetelně pod jejich mezemi kluzu (jak vyžadují normy). Proto jsou zjednodušené modely používané pro použitelnost platné pouze tehdy, jsou-li splněny všechny požadavky na ověření.
Výpočet šířky trhlin a tahové zpevnění
Výpočet šířky trhlin
Existují dva způsoby výpočtu šířky trhlin – stabilizované a nestabilizované trhliny. Na základě geometrického stupně vyztužení v každé části konstrukce se rozhoduje, který typ modelu výpočtu trhlin bude použit (TCM pro stabilizované trhliny a POM pro nestabilizované trhliny).
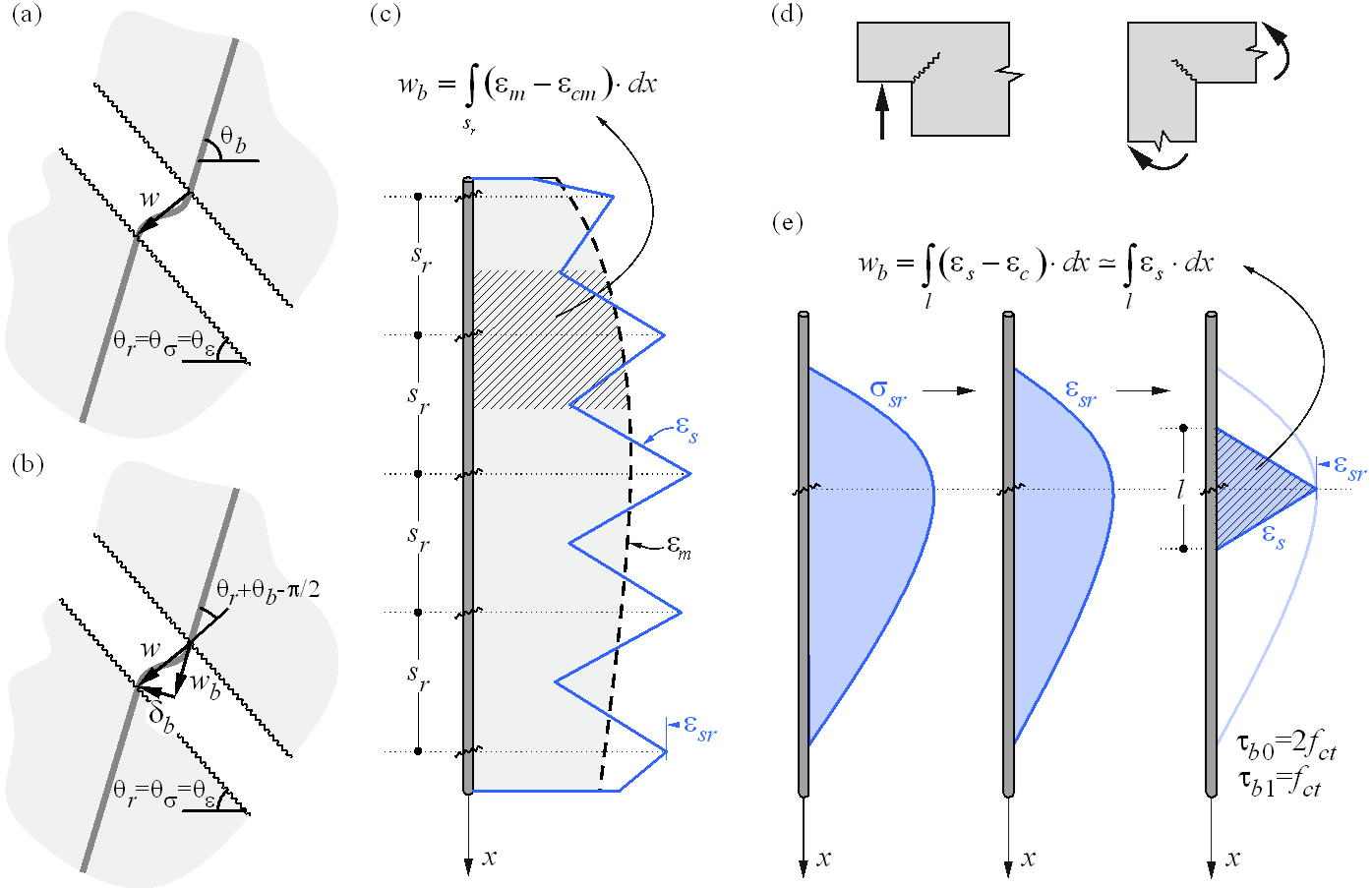
\( \textsf{\textit{\footnotesize{Fig. 20 \qquad Crack width calculation: (a) considered crack kinematics; (b) projection of crack kinematics into the principal}}}\) \( \textsf{\textit{\footnotesize{directions of the reinforcing bar; (c) crack width in the direction of the reinforcing bar for stabilized cracking; (d) cases with}}}\) \( \textsf{\textit{\footnotesize{local non-stabilized cracking regardless of the reinforcement amount; (e) crack width in the direction of the reinforcing bar}}}\)\( \textsf{\textit{\footnotesize{for non-stabilized cracking.}}}\)
Zatímco CSFM poskytuje přímý výsledek pro většinu posouzení (např. únosnost prvku, průhyby…), výsledky šířky trhlin jsou vypočítány z výsledků přetvoření výztuže přímo poskytnutých analýzou MKP podle metodiky popsané na Obr. 20. Uvažuje se kinematika trhliny bez skluzu (čisté otevírání trhliny) (Obr. 20a), což je v souladu s hlavními předpoklady modelu. Hlavní směry napětí a přetvoření definují sklon trhlin (θr = θs= θe). Podle (Obr. 20b) lze šířku trhliny (w) promítnout do směru prutu výztuže (wb), což vede k:
\[w = \frac{w_b}{\cos\left(θ_r + θ_b - \frac{π}{2}\right)}\]
kde θb je sklon prutu výztuže.
Upozorňujeme, že program zobrazuje hodnoty θr a θb < π/2. To znamená, že předchozí rovnice platí pro případy, kdy výztuž a trhlina procházejí různými kvadranty kartézského souřadnicového systému, jak je znázorněno na Obr. 20, kde výztuž prochází I. a III. kvadrantem a trhlina II. a IV. kvadrantem. Pro případy, kdy výztuž a trhlina procházejí stejnými kvadranty, je nutné rovnici upravit takto:
\[w = \frac{w_b}{\cos\left(-θ_r + θ_b + \frac{π}{2}\right)}\]
Složka wb je konzistentně vypočítána na základě modelů tahového zpevnění integrací přetvoření výztuže. Pro oblasti s plně rozvinutým vzorem trhlin jsou vypočítaná průměrná přetvoření (em) podél prutů výztuže přímo integrována podél rozteče trhlin (sr), jak je uvedeno na (Obr. 20c). Přestože tento přístup k výpočtu směrů trhlin neodpovídá skutečné poloze trhlin, stále poskytuje reprezentativní hodnoty, které vedou k výsledkům šířky trhlin, jež lze porovnat s hodnotami šířky trhlin požadovanými normou v místě prutu výztuže.
Zvláštní situace nastávají v konkávních rozích posuzované konstrukce. V tomto případě roh předurčuje polohu jediné trhliny, která se chová nestabilizovaným způsobem, dokud se nevyvinou další sousední trhliny. Tyto další trhliny se obecně vyvíjejí až po překročení provozního rozsahu (Mata-Falcón 2015), což odůvodňuje výpočet šířky trhlin v takové oblasti jako nestabilizovaných (Obr. 21).
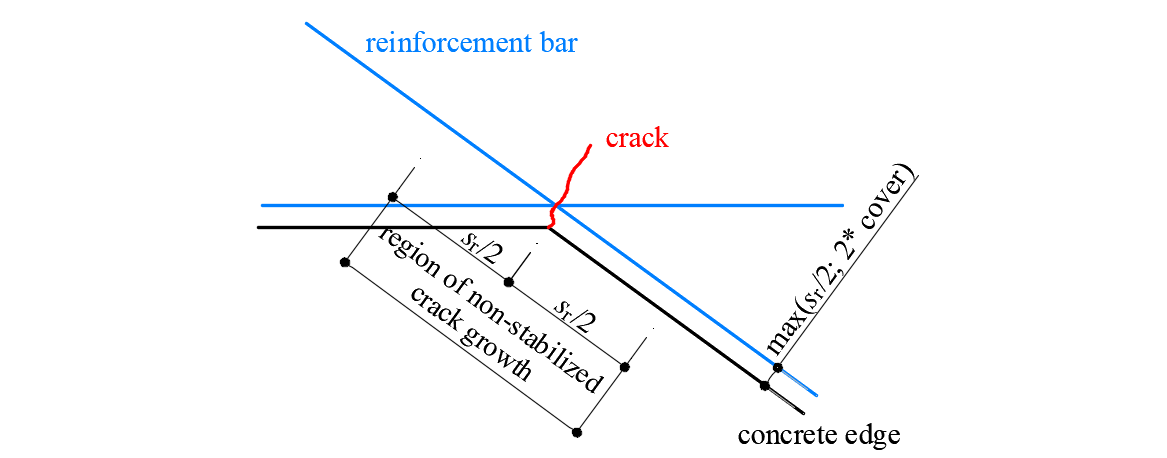
\[ \textsf{\textit{\footnotesize{Fig. 21\qquad Definition of the region at concave corners in which the crack width is computed as if it were non-stabilized.}}}\]
Tahové zpevnění
Implementace tahového zpevnění rozlišuje mezi případy stabilizovaného a nestabilizovaného vzoru trhlin. V obou případech se beton standardně považuje za plně popraskany před zatížením.
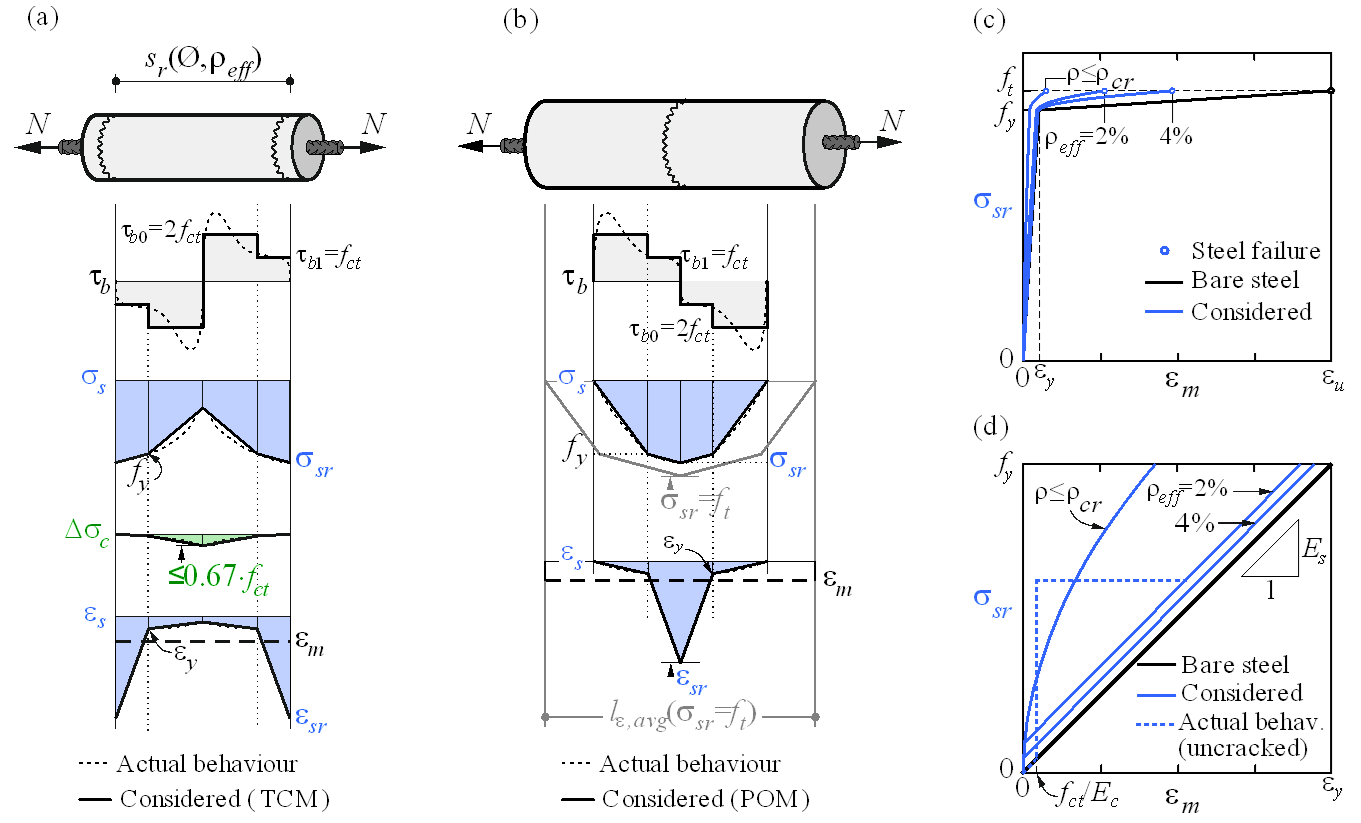
\( \textsf{\textit{\footnotesize{Fig. 22\qquad Tension stiffening model: (a) tension chord element for stabilized cracking with distribution of bond shear,}}}\) \( \textsf{\textit{\footnotesize{steel and concrete stresses, and steel strains between cracks, considering average crack spacing); (b) pull-out assumption}}}\) \( \textsf{\textit{\footnotesize{for non-stabilized cracking with distribution of bond shear and steel stresses and strains around the crack; (c) resulting}}}\) \( \textsf{\textit{\footnotesize{tension chord behavior in terms of reinforcement stresses at the cracks and average strains for European B500B steel;}}}\) \( \textsf{\textit{\footnotesize{(d) detail of the initial branches of the tension chord response.}}}\)
Stabilizované trhliny
U plně rozvinutých vzorů trhlin je tahové zpevnění zavedeno pomocí modelu tahového táhla (TCM) (Marti et al. 1998; Alvarez 1998) – Obr. 22a – u kterého bylo prokázáno, že navzdory své jednoduchosti poskytuje vynikající předpovědi odezvy (Burns 2012). TCM předpokládá stupňovitý, tuhý-dokonale plastický vztah smykového napětí soudržnosti a skluzu s τb = τb0 =2 fctm pro σs ≤ fy a τb =τb1 = fctm pro σs > fy. Při uvažování každého prutu výztuže jako tahového táhla – Obr. 22b a Obr. 22a – lze pro libovolnou danou hodnotu maximálního napětí oceli (nebo přetvoření) v trhlinách stanovit rozložení smykového napětí soudržnosti, napětí oceli a betonu, a tedy rozložení přetvoření mezi dvěma trhlinami.
Pro sr = sr0 může nebo nemusí vzniknout nová trhlina, protože ve středu mezi dvěma trhlinami platí σc1 = fct. V důsledku toho se rozteč trhlin může lišit o faktor dva, tj. sr = λsr0, kde l = 0,5…1,0. Při předpokladu určité hodnoty λ lze průměrné přetvoření táhla (εm) vyjádřit jako funkci maximálního napětí výztuže (tj. napětí v trhlinách, σsr). Pro idealizovaný bilineární diagram napětí-přetvoření pro holé pruty výztuže uvažované standardně v CSFM jsou získány následující analytické výrazy v uzavřeném tvaru (Marti et al. 1998):
\[\varepsilon_m = \frac{\sigma_{sr}}{E_s} - \frac{\tau_{b0}s_r}{E_s Ø}\]
\[\textrm{for}\qquad\qquad\sigma_{sr} \le f_y\]
\[{\varepsilon_m} = \frac{{{{\left( {{\sigma_{sr}} - {f_y}} \right)}^2}Ø}}{{4{E_{sh}}{\tau _{b1}}{s_r}}}\left( {1 - \frac{{{E_{sh}}{\tau_{b0}}}}{{{E_s}{\tau_{b1}}}}} \right) + \frac{{\left( {{\sigma_{sr}} - {f_y}} \right)}}{{{E_s}}}\frac{{{\tau_{b0}}}}{{{\tau_{b1}}}} + \left( {{\varepsilon_y} - \frac{{{\tau_{b0}}{s_r}}}{{{E_s}Ø}}} \right)\]
\[\textrm{for}\qquad\qquad{f_y} \le {\sigma _{sr}} \le \left( {{f_y} + \frac{{2{\tau _{b1}}{s_r}}}{Ø}} \right)\]
\[ \varepsilon_m = \frac{f_s}{E_s} + \frac{\sigma_{sr}-f_y}{E_{sh}} - \frac{\tau_{b1} s_r}{E_{sh} Ø}\]
\[\textrm{for}\qquad\qquad\left(f_y + \frac{2\tau_{b1}s_r}{Ø}\right) \le \sigma_{sr} \le f_t\]
kde:
Esh modul zpevnění oceli Esh = (ft – fy)/(εu – fy /Es) ,
Es modul pružnosti výztuže,
Ø průměr prutu výztuže,
sr rozteč trhlin,
σsr napětí výztuže v trhlinách,
σs skutečné napětí výztuže,
fy mez kluzu výztuže.
Implementace CSFM v IDEA StatiCa Detail standardně uvažuje průměrnou rozteč trhlin při provádění počítačové analýzy napěťových polí. Průměrná rozteč trhlin je uvažována jako 2/3 maximální rozteče trhlin (λ = 0,67), což vychází z doporučení na základě zkoušek ohybem a tahem (Broms 1965; Beeby 1979; Meier 1983). Je třeba poznamenat, že výpočty šířky trhlin uvažují maximální rozteč trhlin (λ = 1,0) za účelem získání konzervativních hodnot.
Použití TCM závisí na stupni vyztužení, a proto je klíčové přiřazení odpovídající plochy betonu působícího v tahu mezi trhlinami ke každému prutu výztuže. Byl vyvinut automatický numerický postup pro definování odpovídajícího efektivního stupně vyztužení (ρeff = As/Ac,eff) pro libovolnou konfiguraci, včetně šikmého vyztužení (Obr. 23).
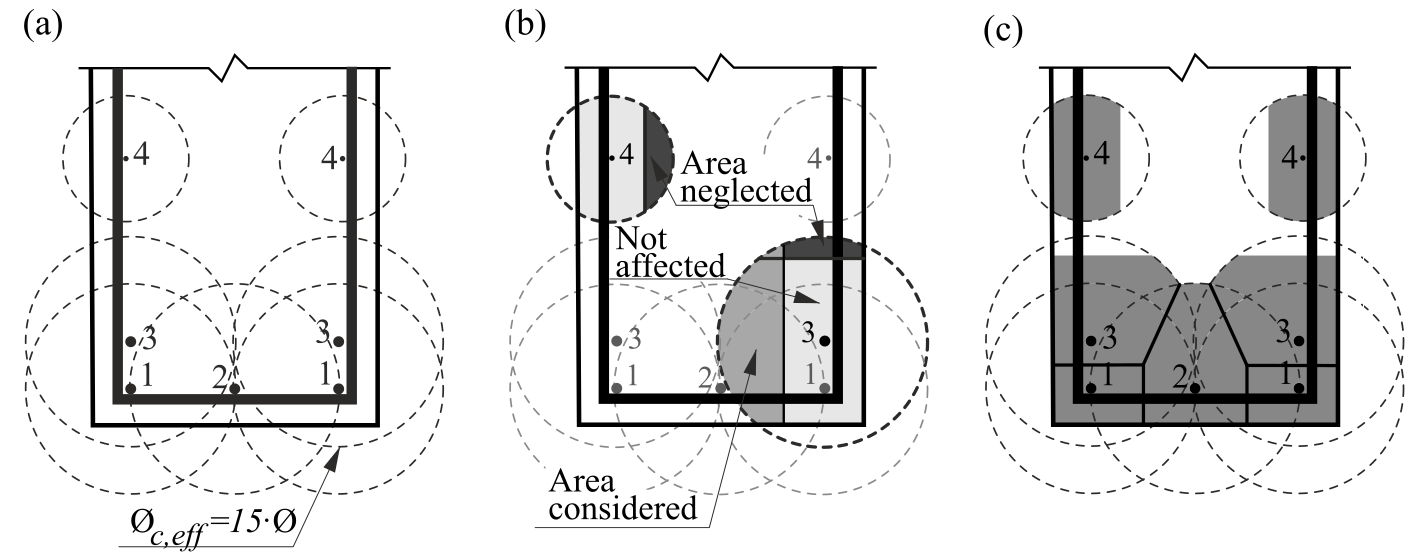
\( \textsf{\textit{\footnotesize{Fig. 23\qquad Effective area of concrete in tension for stabilized cracking: (a) maximum concrete area that can be activated;}}}\) \( \textsf{\textit{\footnotesize{(b) cover and global symmetry condition; (c) resultant effective area.}}}\)
Nestabilizované trhliny
Trhliny vyskytující se v oblastech s geometrickým stupněm vyztužení nižším než ρcr, tj. minimálním množstvím výztuže, při kterém je výztuž schopna přenést zatížení při vzniku trhliny bez dosažení meze kluzu, jsou způsobeny buď nemechanickými účinky (např. smršťováním) nebo šířením trhlin řízených jinou výztuží. Hodnota tohoto minimálního vyztužení se získá takto:
\[{\rho _{cr}} = \frac{{{f_{ct}}}}{{{f_y} - \left( {n - 1} \right){f_{ct}}}}\]
kde:
fy mez kluzu výztuže,
fct pevnost betonu v tahu,
n modulový poměr, n = Es / Ec .
Pro běžný beton a betonářskou ocel činí ρcr přibližně 0,6 %.
Pro třmínky se stupněm vyztužení nižším než ρcr je trhlina považována za nestabilizovanou a tahové zpevnění je implementováno pomocí modelu vytažení (POM) popsaného na Obr. 22b. Tento model analyzuje chování jediné trhliny bez uvažování mechanické interakce mezi jednotlivými trhlinami, zanedbává deformovatelnost betonu v tahu a předpokládá stejný stupňovitý, tuhý-dokonale plastický vztah smykového napětí soudržnosti a skluzu používaný TCM. To umožňuje získat rozložení přetvoření výztuže (εs) v okolí trhliny pro libovolné maximální napětí oceli v trhlině (σsr) přímo z podmínek rovnováhy. Vzhledem k tomu, že rozteč trhlin je pro neúplně rozvinutý vzor trhlin neznámá, je průměrné přetvoření (εm) vypočítáno pro libovolnou úroveň zatížení na vzdálenosti mezi body s nulovým skluzem, kdy prut výztuže dosahuje své pevnosti v tahu (ft) v trhlině (lε,avg na Obr. 22b), což vede k následujícím vztahům:
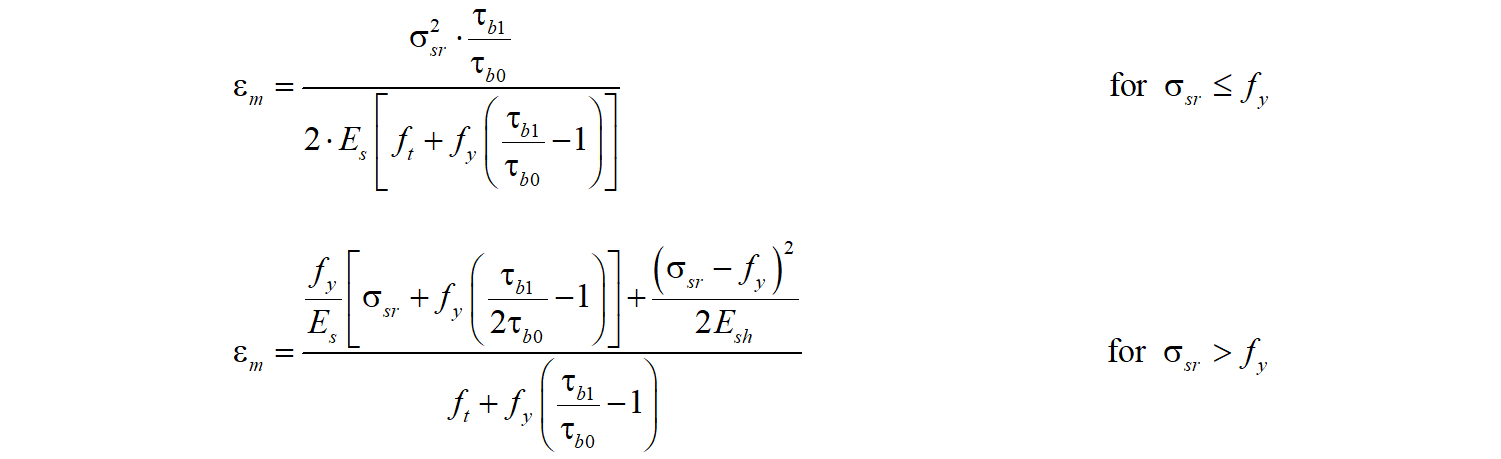
Navržené modely umožňují výpočet chování soudržné výztuže, která je nakonec zohledněna v analýze. Toto chování (včetně tahového zpevnění) pro nejběžnější evropskou betonářskou ocel (B500B, s ft / fy = 1,08 a εu = 5 %) je znázorněno na Obr. 22c-d.
4 Structural verifications according to Eurocode
Assessment of the structure using CSFM is performed by two different analyses: one for serviceability, and one for ultimate limit state load combinations. The serviceability analysis assumes that the ultimate behavior of the element is satisfactory, and the yield conditions of the material will not be reached at serviceability load levels. This approach enables the use of simplified constitutive models (with a linear branch of concrete stress-strain diagram) for serviceability analysis to enhance numerical stability and calculation speed.
4.1 Modely materiálů (EN)
Beton - MSÚ
Model betonu implementovaný v CSFM vychází z jednoosých konstitutivních zákonů pro tlak předepsaných normou EN 1992-1-1 pro návrh průřezů, které závisí pouze na pevnosti v tlaku. Diagram parabola-obdélník specifikovaný v EN 1992-1-1 Cl. 3.1.7 (1) (Obr. 24a) je v CSFM používán jako výchozí, ale projektanti mohou také zvolit zjednodušený elasticko-ideálně plastický vztah podle EN 1992-1-1 Cl. 3.1.7 (2) (Obr. 24b). Pevnost v tahu je zanedbána, stejně jako v klasickém návrhu železobetonu.
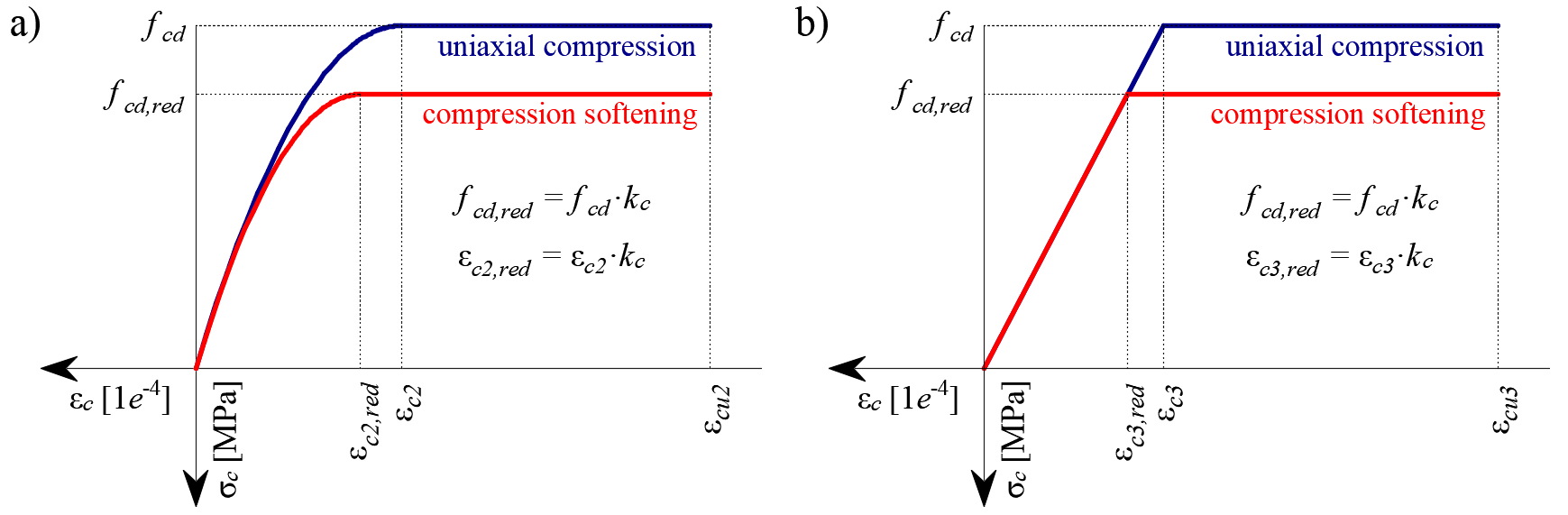
\[ \textsf{\textit{\footnotesize{Fig. 24\qquad The stress-strain diagrams of concrete for ULS: a) parabola-rectangle diagram; b) bilinear diagram.}}}\]
Implementace CSFM v IDEA StatiCa Detail neuvažuje explicitní kritérium porušení z hlediska přetvoření betonu v tlaku (tj. po dosažení maximálního napětí uvažuje plastickou větev s εcu2 (εcu3) o hodnotě 5 %, zatímco EN 1992-1-1 předpokládá mezní přetvoření menší než 0,35 %). Toto zjednodušení neumožňuje ověřit deformační kapacitu konstrukcí porušovaných tlakem. Jejich mezní únosnost fcd podle EN 1992-1-1 3.1.3 je však správně předpovězena, pokud je vedle součinitele trhlinami oslabeného betonu (kc2 definovaného na (Obr. 25)) zohledněn nárůst křehkosti betonu s rostoucí pevností pomocí redukčního součinitele \(\eta_{fc}\) definovaného v fib Model Code 2010 takto:
\[f_{cd}={\alpha_{cc}} \cdot \frac{f_{ck,red}}{γ_c} = {\alpha_{cc}} \cdot \frac{k_c \cdot f_{ck}}{γ_c} = {\alpha_{cc}} \cdot \frac{\eta _{fc} \cdot k_{c2} \cdot f_{ck}}{γ_c}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f_{ck}}}}} \right)^{\frac{1}{3}}} \le 1\]
kde:
αcc je součinitel zohledňující dlouhodobé účinky na pevnost v tlaku a nepříznivé účinky vyplývající ze způsobu přenášení zatížení. Stanovuje se podle EN 1992-1-1 Cl. 3.1.6 (1). Výchozí hodnota je 1,0.
kc je globální redukční součinitel pevnosti v tlaku
kc2 je redukční součinitel zohledňující přítomnost příčných trhlin
fck je charakteristická válcová pevnost betonu (v MPa pro definici \( \eta_{fc} \)).
\[ \textsf{\textit{\footnotesize{Fig. 25\qquad The compression softening law.}}}\]
Beton - MSP
Analýza použitelnosti obsahuje určitá zjednodušení konstitutivních modelů používaných pro analýzu mezního stavu únosnosti. Plastická větev diagramu napětí-přetvoření betonu v tlaku je zanedbána, zatímco elastická větev je lineární a neomezená. Zákon tlakového změkčení není uvažován. Tato zjednodušení zvyšují numerickou stabilitu a rychlost výpočtu a nesnižují obecnost řešení, pokud jsou výsledná omezení napětí materiálu při použitelnosti zřetelně pod mezí kluzu (jak vyžaduje Eurocode). Zjednodušené modely používané pro použitelnost jsou proto platné pouze tehdy, jsou-li splněny všechny požadavky na ověření.
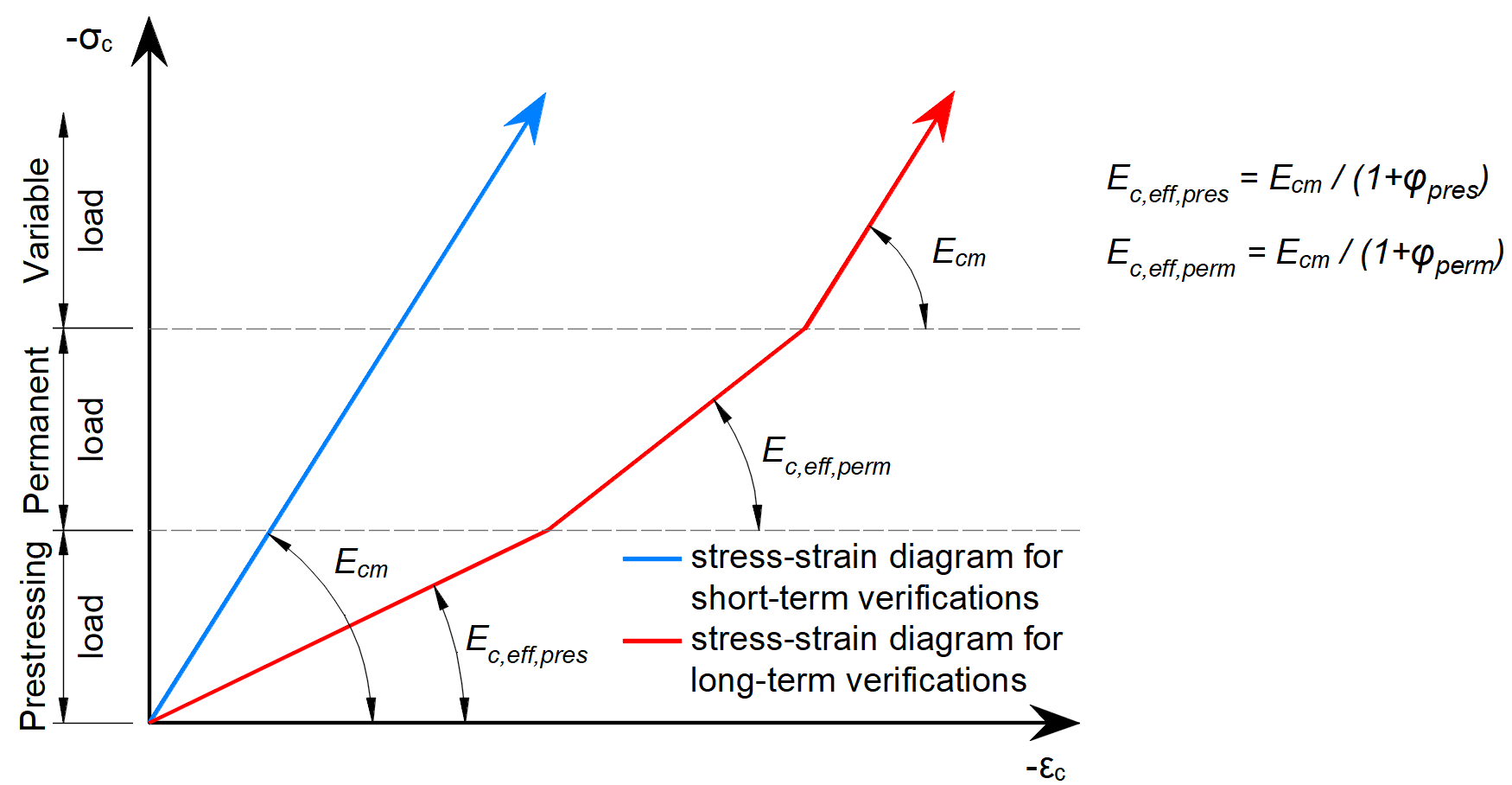
\[ \textsf{\textit{\footnotesize{Fig. 26\qquad Concrete stress-strain diagrams implemented for serviceability analysis: short- and long-term verifications.}}}\]
Dlouhodobé účinky
V analýze použitelnosti jsou dlouhodobé účinky betonu zohledněny pomocí efektivního nekonečného součinitele dotvarování (\(\varphi\), jehož výchozí hodnota je 2,5), který upravuje sečnový modul pružnosti betonu (Ecm) podle EN 1992-1-1, oddíl 3.1.4 (3) resp. 7.4.3 (5) takto:
\[E_{c,eff} = \frac{E_{cm}}{1+\varphi}\]
Při zohledňování dlouhodobých účinků je nejprve vypočten zatěžovací krok se všemi stálými zatíženími s uvažováním součinitele dotvarování (tj. s použitím efektivního modulu pružnosti betonu Ec,eff) a poté jsou přídavná zatížení vypočtena bez součinitele dotvarování (tj. s použitím Ecm). Pro krátkodobá ověření je navíc proveden další výpočet, ve kterém jsou všechna zatížení vypočtena bez součinitele dotvarování. Oba výpočty pro dlouhodobá a krátkodobá ověření jsou znázorněny na Obr. 26.
Součinitele dotvarování jsou definovány uživatelem ve vlastnostech materiálu a musí být stanoveny podle EN 1992-1-1, Obr. 3.1.
Vyztužení
Jako výchozí je uvažován idealizovaný bilineární diagram napětí-přetvoření pro holé výztužné pruty definovaný v EN 1992-1-1, oddíl 3.2.7 (Obr. 27). Definice tohoto diagramu vyžaduje pouze znalost základních vlastností výztuže ve fázi návrhu (pevnost a třída tažnosti). Pokud jsou tyto informace k dispozici, lze uvažovat skutečný vztah napětí-přetvoření výztuže (válcovaný za tepla, tažený za studena, kalený a samopopuštěný, …). Diagram napětí-přetvoření výztuže může být definován uživatelem, v takovém případě však nelze předpokládat tahové zpevnění (nelze vypočítat šířku trhlin). Použití diagramu napětí-přetvoření s vodorovnou horní větví neumožňuje ověření konstrukční trvanlivosti. Proto je nutné ruční ověření standardních požadavků na tažnost.
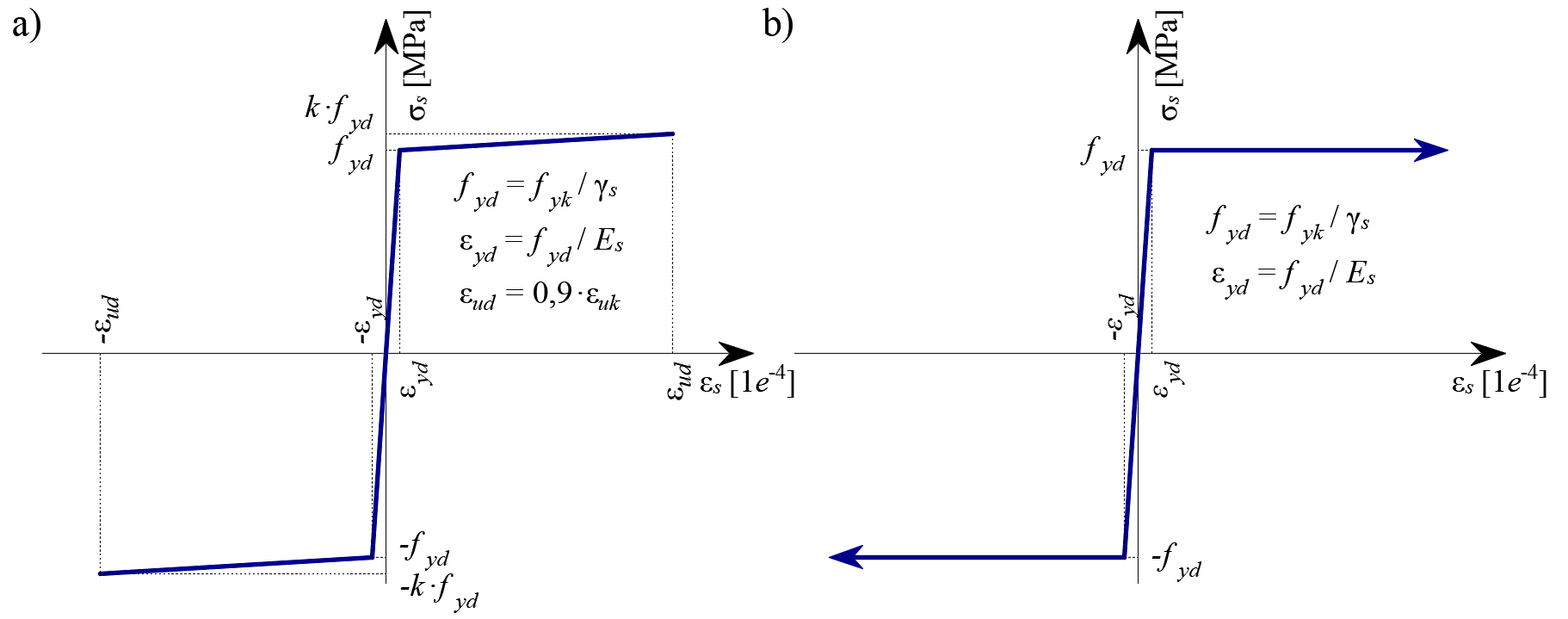
\( \textsf{\textit{\footnotesize{Fig. 27 \qquad Stress-strain diagram of reinforcement: a) bilinear diagram with an inclined top branch; b) bilinear diagram}}}\) \( \textsf{\textit{\footnotesize{with a horizontal top branch.}}}\)
Tahové zpevnění (Obr. 28) je automaticky zohledněno úpravou vstupního diagramu napětí-přetvoření holého výztužného prutu tak, aby byla zachycena průměrná tuhost prutů zabetonovaných v betonu (εm).
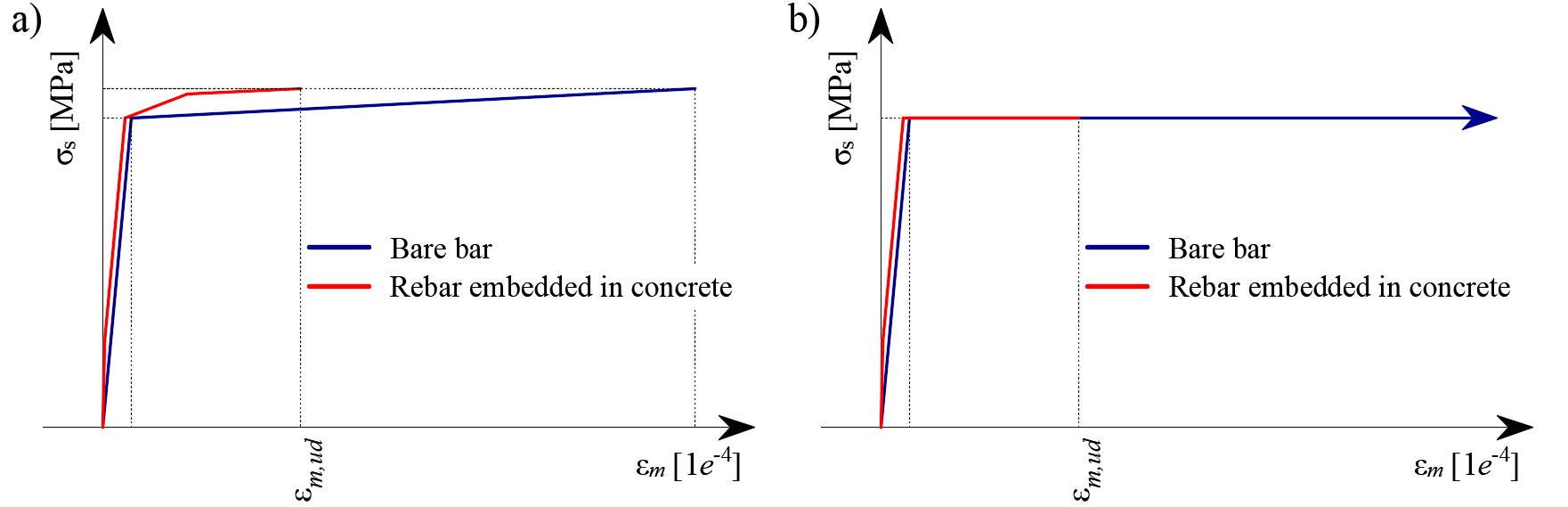
\[ \textsf{\textit{\footnotesize{Fig. 28\qquad Scheme of tension stiffening.}}}\]
4.2 Bezpečnostní součinitele
Compatible Stress Field Method je v souladu s moderními návrhových normami. Protože výpočetní modely využívají pouze standardní vlastnosti materiálů, lze bez jakékoli úpravy použít formát dílčích součinitelů bezpečnosti předepsaný v návrhových normách. Vstupní zatížení jsou tak násobena příslušnými součiniteli a charakteristické vlastnosti materiálů jsou redukovány pomocí příslušných bezpečnostních součinitelů předepsaných v normách, přesně jako při konvenční analýze betonu. Hodnoty součinitelů bezpečnosti materiálu předepsané v EN 1992-1-1 kap. 2.4.2.4 jsou nastaveny jako výchozí, uživatel však může bezpečnostní součinitele změnit v nastavení Normy a výpočtu (Obr. 29).

\[ \textsf{\textit{\footnotesize{Fig. 29\qquad The setting of material safety factors in Idea StatiCa Detail.}}}\]
Součinitele bezpečnosti zatížení musí uživatel definovat v pravidlech kombinací pro každou nelineární kombinaci zatěžovacích stavů (Obr. 30). Pro všechny šablony implementované v Idea StatiCa Detail jsou dílčí součinitele bezpečnosti již předdefinovány.
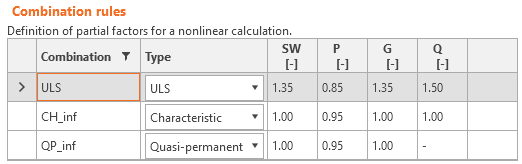
\[ \textsf{\textit{\footnotesize{Fig. 30\qquad The setting of load partial factors in Idea StatiCa Detail.}}}\]
Použitím vhodných uživatelsky definovaných kombinací dílčích součinitelů bezpečnosti mohou uživatelé provádět výpočty pomocí CSFM také metodou globálního součinitele únosnosti (Navrátil a kol. 2017), tento přístup se však v návrhové praxi téměř nepoužívá. Některé metodické pokyny doporučují používat metodu globálního součinitele únosnosti pro nelineární analýzu. Nicméně u zjednodušených nelineárních analýz (jako je CSFM), které vyžadují pouze ty vlastnosti materiálů, jež se používají při konvenčních ručních výpočtech, je stále vhodnější používat formát dílčích součinitelů bezpečnosti.
4.3 Analýza mezního stavu únosnosti
Různá posouzení požadovaná normou EN 1992-1-1 jsou vyhodnocována na základě přímých výsledků poskytnutých modelem. Posouzení na MSÚ se provádí pro pevnost betonu, pevnost vyztužení a kotvení (smykové napětí v soudržnosti).
Pevnost betonu v tlaku je vyhodnocována jako poměr mezi maximálním hlavním tlakovým napětím σc = σc2 získaným z analýzy MKP a limitní hodnotou σc,lim = fcd.
Pevnost vyztužení je vyhodnocována jak v tahu, tak v tlaku jako poměr mezi napětím ve vyztužení v trhlinách σsr a stanovenou limitní hodnotou σs,lim:
\(σ_{s,lim} = \frac{k \cdot f_{yk}}{γ_s}\qquad\qquad\textsf{\small{for bilinear diagram with inclined top branch}}\)
\(σ_{s,lim} = \frac{f_{yk}}{γ_s}\qquad\qquad\,\,\,\,\textsf{\small{for bilinear diagram with horizontal top branch}}\)
kde:
fyk mez kluzu vyztužení podle EN 1992-1-1 čl. 3.2.3,
k poměr pevnosti v tahu ftk k mezi kluzu,
\(k = \frac{f_{tk}}{f_{yk}}\)
γs je dílčí součinitel spolehlivosti pro vyztužení
Smykové napětí v soudržnosti je vyhodnocováno samostatně jako poměr mezi napětím v soudržnosti τb vypočteným analýzou MKP a mezní pevností v soudržnosti fbd, podle EN 1992-1-1 kap. 8.4.2:
\[\frac{τ_{b}}{f_{bd}}\]
\[f_{bd} = 2.25 \cdot η_1\cdot η_2\cdot f_{ctd}\]
kde:
fctd je návrhová hodnota pevnosti betonu v tahu podle EN 1992-1-1 čl. 3.1.6 (2). Vzhledem k rostoucí křehkosti betonů vyšších pevností je fctk,0.05 omezena na hodnotu pro C60/75 podle EN 1992-1-1 čl. 8.4.2 (2)
η1 je součinitel závislý na kvalitě podmínek soudržnosti a poloze prutu při betonáži (obr. 31).
η1 = 1,0 při splnění podmínek „dobré" soudržnosti a
η1 = 0,7 ve všech ostatních případech a pro pruty v konstrukčních prvcích betonovaných do posuvného bednění, pokud nelze prokázat existenci „dobré" soudržnosti
η2 závisí na průměru prutu:
η2 = 1,0 pro Ø ≤ 32 mm
η2 = (132 - Ø)/100 pro Ø > 32 mm
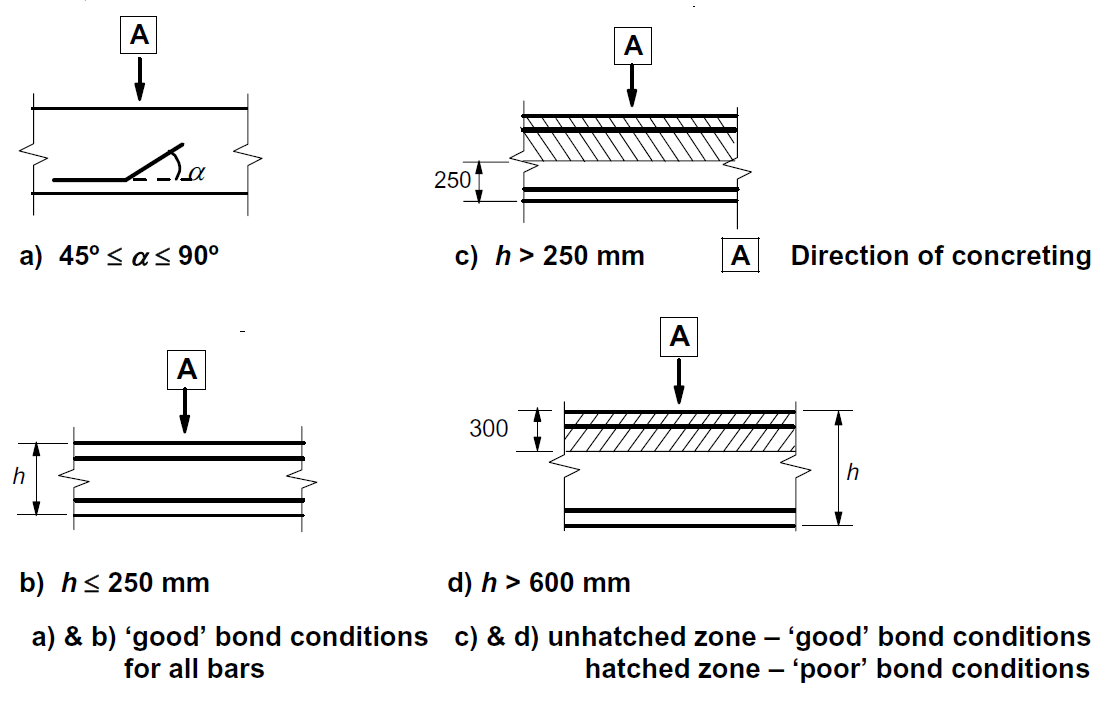
\[ \textsf{\textit{\footnotesize{Fig. 31\qquad EN 1992-1-1 Figure 8.2 - Description of bond conditions.}}}\]
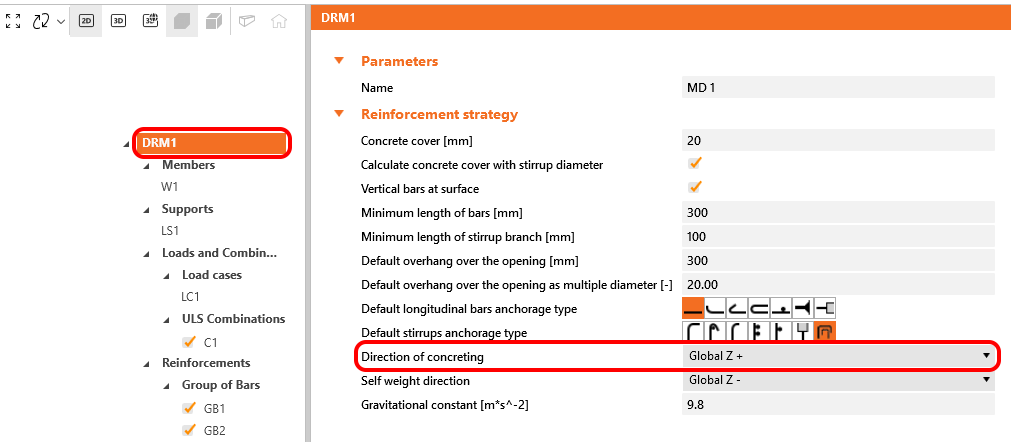
V IDEA StatiCa Detail jsou podmínky soudržnosti zohledněny podle obr. 31 c) a d). Směr betonáže lze v aplikaci nastavit pro každou položku projektu následovně.
Tato posouzení jsou prováděna s ohledem na příslušné limitní hodnoty pro jednotlivé části konstrukce (tj. přestože je použita jediná třída betonu i vyztužení, výsledné diagramy napětí-přetvoření se v jednotlivých částech konstrukce budou lišit vlivem tahového zpevnění a tlakového změkčení).
K dispozici je také možnost modelování hladkých prutů. Více informací naleznete zde: Hladké pruty v Detail
Celková síla Ftot a limitní síla Flim
Celková síla Ftot je výsledkem analýzy metodou konečných prvků a lze ji definovat dvěma způsoby.
\[F_{tot}=A_{s}\cdot \sigma_{s}\]
kde As je průřezová plocha prutu vyztužení a σs je napětí v prutu.
Nebo jako součet kotevní síly Fa a síly ze soudržnosti Fbond.
\[F_{tot}=F_{a}+F_{bond}\]
kde Fa je skutečná síla v kotevní pružině a Fbond je síla ze soudržnosti, kterou lze získat integrací napětí v soudržnosti τb po délce prutu vyztužení l.
\[F_{bond}=C_{s} \cdot \int_{0}^{l}\tau_{b}\left( x \right)dx\]
Cs je obvod prutu vyztužení.
Limitní síla Flim je maximální síla v prvku prutu s ohledem na mezní pevnost prutu a také podmínky kotvení (soudržnost mezi betonem a vyztužením a kotevní háky, smyčky atd.).
\[F_{lim}=min\left( F_{lim,bond}+F_{au},F_{u} \right)\]
\[F_{u}=k\cdot f_{yd}\cdot A_{s}\]
\[F_{au}=\beta\cdot k\cdot f_{yd}\cdot A_{s}\]
\[F_{lim,bond}=C_{s}\cdot l \cdot f_{bd}\]
kde Cs je obvod prutu vyztužení a l je délka od začátku prutu po sledovaný bod.
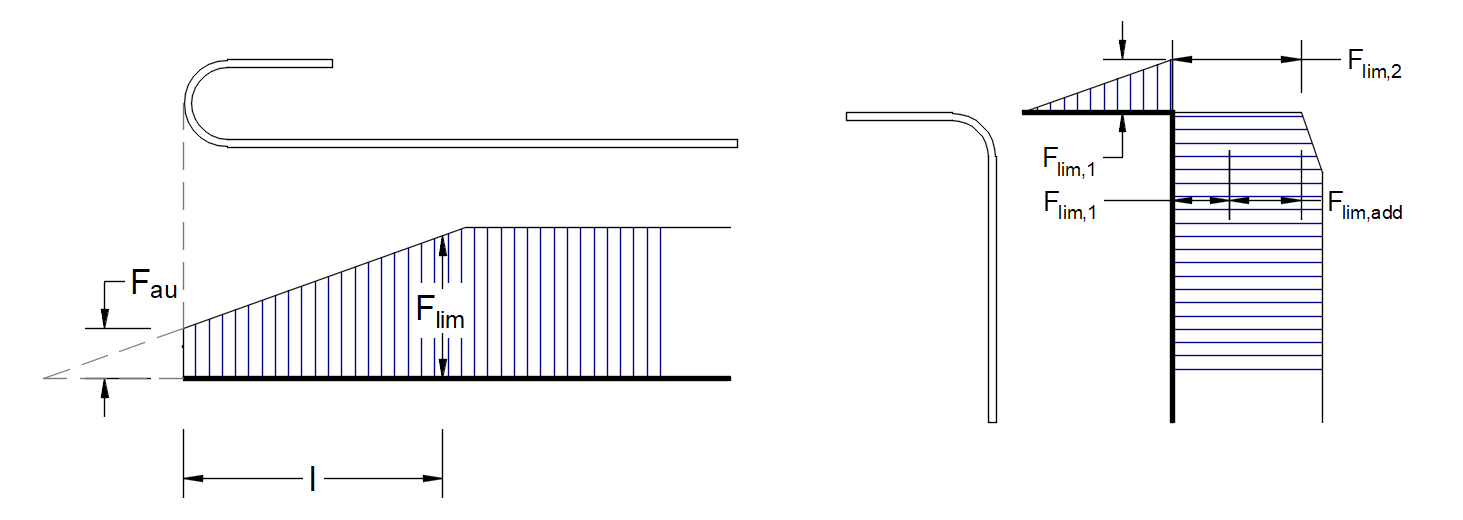
\[ \textsf{\textit{\footnotesize{Fig. 32\qquad Definition of the limit force Flim}}}\]
\[F_{lim,2}=F_{lim,1}+F_{lim,add}\]
kde Flim,add je přídavná síla vypočtená z velikosti úhlu mezi sousedními prvky. Flim,2 musí být vždy menší než Fu.
Dostupné typy kotvení v CSFM zahrnují přímý prut (tj. bez redukce kotevního konce), ohyb, hák, smyčku, přivařený příčný prut, dokonalou soudržnost a průběžný prut. Všechny tyto typy spolu s příslušnými součiniteli kotvení β jsou znázorněny na obr. 32 pro podélné vyztužení a na obr. 33 pro třmínky. Hodnoty použitých součinitelů kotvení jsou v souladu s EN 1992-1-1 oddíl 8.4.4 tab. 8.2. Je třeba poznamenat, že přes různé dostupné možnosti rozlišuje CSFM tři typy kotevních konců: (i) bez redukce kotevní délky, (ii) redukce o 30 % kotevní délky v případě normalizovaného kotvení a (iii) dokonalá soudržnost.

\[ \textsf{\textit{\footnotesize{Fig. 33\qquad Available anchorage types and respective anchorage coefficients for longitudinal reinforcing bars in the CSFM:}}}\]
\[ \textsf{\textit{\footnotesize{(a) straight bar; (b) bend; (c) hook; (d) loop; (e) welded transverse bar; (f) perfect bond; (g) continuous bar.}}}\]

\[ \textsf{\textit{\footnotesize{Fig. 33\qquad Available anchorage types and respective anchorage coefficients for stirrups.}}}\]
\[ \textsf{\textit{\footnotesize{Closed stirrups: (a) hook; (b) bend; (c) overlap. Open stirrups: (d) hook; (e) continuous bar.}}}\]
Aby bylo dosaženo souladu s EN 1992-1-1, musí být v výpočtu použita kotevní pružina; kotevní pružina je upravena součinitelem β, takže uživatel musí při definování podmínek začátku a konce vyztužení použít jeden z dostupných typů kotvení.
4.4 Částečně zatížené plochy (PLA)
Při navrhování betonových konstrukcí se setkáváme se dvěma velkými skupinami částečně zatížených ploch (PLA) – první z nich tvoří ložiska, zatímco druhou tvoří kotevní oblasti. Podle aktuálně platných norem pro navrhování železobetonových konstrukcí EN 1992-1-1 kap. 6.7 (Obr. 34) je třeba u částečně zatížených ploch uvažovat místní drcení betonu a příčné tahové síly. Pro rovnoměrně rozložené zatížení na ploše Ac0 lze tlakovou únosnost betonu zvýšit až třikrát v závislosti na návrhové rozdělovací ploše Ac1.
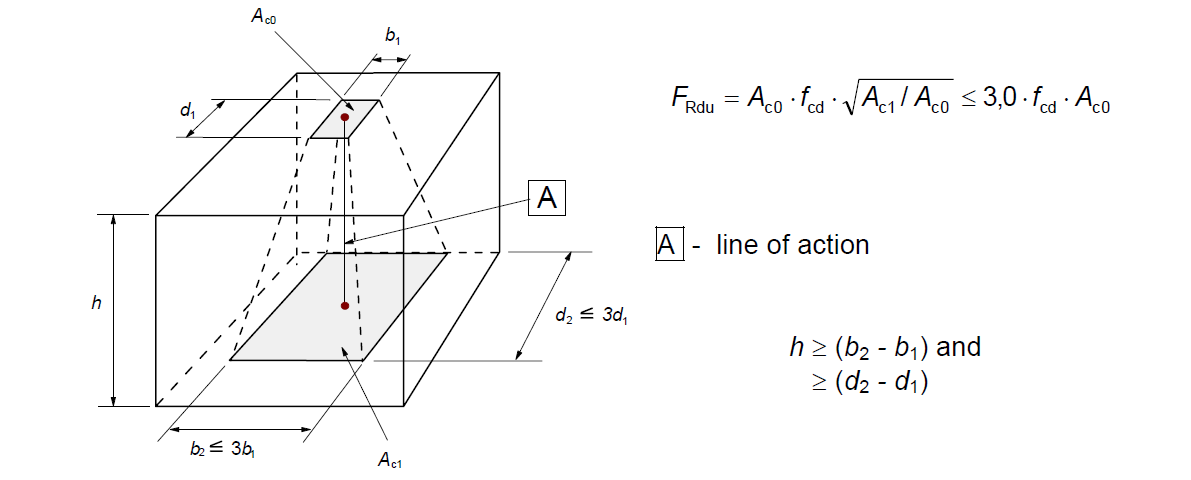
\[ \textsf{\textit{\footnotesize{Fig. 34\qquad Partially loaded areas according to EN 1992-1-1.}}}\]
Částečně zatížená plocha musí být dostatečně vyztužena příčnou výztuží navrženou k přenosu rozštěpných sil, které v dané oblasti vznikají. Pro návrh příčné výztuže v částečně zatížených plochách se podle Eurokódu používá metoda vzpěra-táhlo. Bez požadované příčné výztuže nelze uvažovat se zvýšením tlakové únosnosti betonu.
Částečně zatížené plochy v CSFM
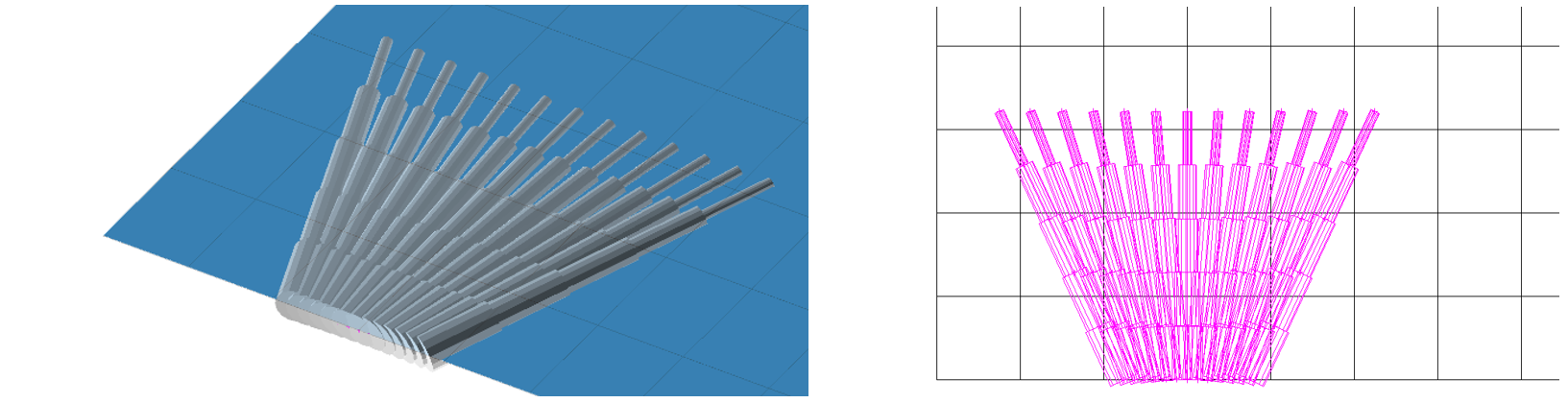
\[ \textsf{\textit{\footnotesize{Fig. 35\qquad Fictitious struts with concrete finite element mesh.}}}\]
Pomocí CSFM je možné navrhovat a posuzovat železobetonové konstrukce s uvažováním vlivu rostoucí tlakové únosnosti betonu v částečně zatížených plochách. Protože CSFM je stěnový (2D) model a částečně zatížené plochy jsou prostorová (3D) úloha, bylo nutné nalézt řešení, které kombinuje tyto dva různé typy úloh (Obr. 35). Pokud je aktivována funkce „částečně zatížené plochy", vytvoří se přípustná geometrie kužele podle Eurokódu (Obr. 34). Veškeré geometrické kolize jsou plně řešeny ve 3D pro zadanou geometrii betonového prvku a rozměry každé PLA. Následně je vytvořen výpočetní model částečně zatížené plochy.
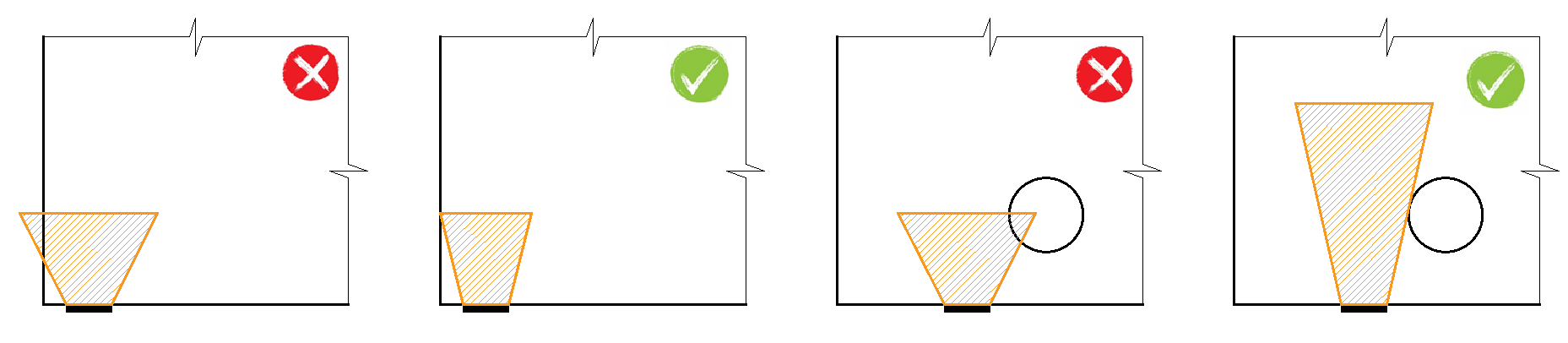
\[ \textsf{\textit{\footnotesize{Fig. 36\qquad Allowable cone geometries.}}}\]
Modifikace materiálového modelu se ukázala jako nevhodný přístup, a to především proto, že mapování vlastností na síť konečných prvků je problematické. Bylo zjištěno, že vhodnějším řešením je přístup nezávislý na síti konečných prvků. Pro známou geometrii tlakového kužele jsou vytvořeny absolutně soudržné fiktivní tlakové vzpěry (Obr. 35 a Obr. 37). Tyto vzpěry mají stejné materiálové vlastnosti jako beton použitý v modelu, včetně diagramu napětí-přetvoření. Tvar kužele určuje směr vzpěr, které postupně rozdělují zatížení z PLA na návrhovou rozdělovací plochu. Plošná hustota fiktivních vzpěr je v každé části kužele proměnná a přidává fiktivní betonovou plochu ve směru zatížení. Na úrovni zatížené plochy (Ac0) je přidána fiktivní plocha betonu podle poměru \(\sqrt{A_{c0} \cdot A_{c1}} - A_{real}\) (kde Areal je plocha podpory uvažovaná ve 2D výpočetním modelu) a tato plocha lineárně klesá na nulu směrem k návrhové rozdělovací ploše (Ac1). Toto řešení zajišťuje, že tlakové napětí v betonu je konstantní v celém objemu kužele.
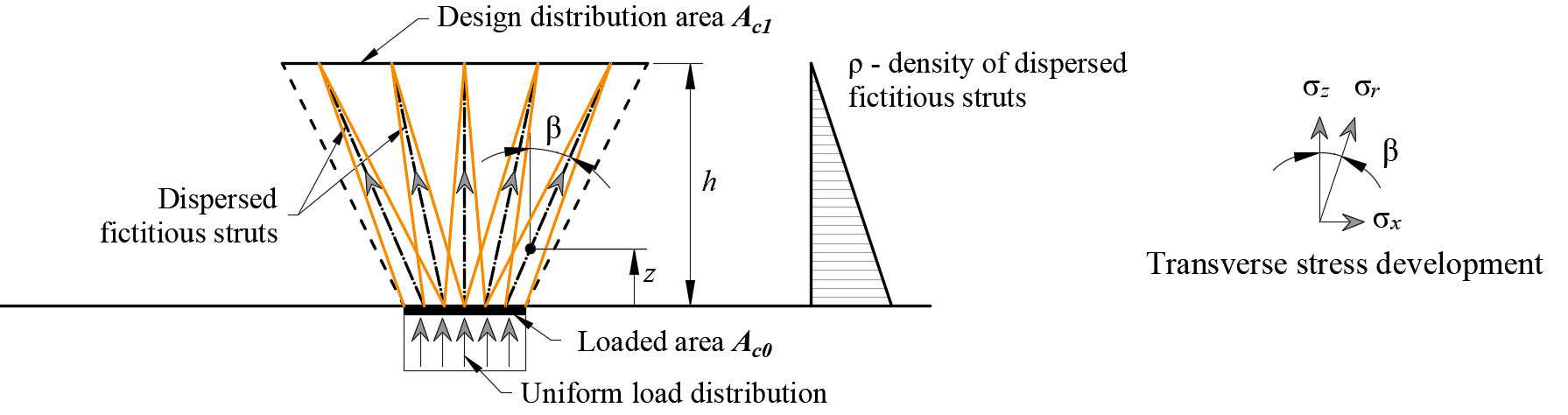
\[\rho \left( {\beta ,z} \right) = \left( {\sqrt {\frac{A_{c1}}{A_{c0}}} - \frac{A_{real}}{A_{c0}}} \right)\,\cdot\,\left( {1 - \frac{z}{h}} \right)\,\cdot\,\frac{1}{{\cos \beta }}\]
\[ \textsf{\textit{\footnotesize{Fig. 37\qquad Fictitious struts in the computational model}}}\]
Únosnost částečně zatížené plochy je zvýšena podle poměru návrhové rozdělovací plochy a zatížené plochy stanoveného v EN 1992-1-1 (6.7). Je třeba mít na paměti, že se jedná o návrhový model, který nemůže přesně popsat stav napětí v částečně zatížené ploše, jehož skutečný průběh je mnohem složitější. Toto řešení však umožňuje správné rozdělení zatížení do celého modelu při respektování zvýšené únosnosti částečně zatížené plochy. Navíc správně zavádí příčná napětí v této oblasti.
Při použití funkce částečně zatížených ploch pro simulaci zvýšení tlakové únosnosti betonu je nutné provést normové posouzení samostatně podle EN 1992-1-1, oddíl 6.7 (2). Příčné tahové síly (rozštěpné síly) přenášené výztuží jsou kontrolovány automaticky.
4.5 Analýza mezního stavu použitelnosti
Posouzení MSP se provádí pro omezení napětí, šířku trhlin a omezení průhybů. Napětí jsou posuzována v prvcích betonu a vyztužení podle EN 1992-1-1 obdobným způsobem jako pro MSÚ.
Omezení napětí
Tlakové napětí v betonu musí být omezeno, aby se zabránilo vzniku podélných trhlin. Podle EN 1992-1-1 čl. 7.2 (2) mohou podélné trhliny vzniknout, pokud úroveň napětí při charakteristické kombinaci zatížení překročí hodnotu k1fck. Napětí v betonu v tlaku je vyhodnoceno jako poměr mezi maximálním hlavním tlakovým napětím σc = σc2 získaným z analýzy metodou konečných prvků pro mezní stavy použitelnosti a limitní hodnotou σc,lim. Platí:
\[\frac{σ_{c}}{σ_{c,lim}}\]
\[σ_{c,lim} = k_1\cdot f_{ck}\]
kde:
fck charakteristická válcová pevnost betonu,
k1 =0,6.
Pokud je napětí v betonu při kvazistálém zatížení menší než k2fck podle EN 1992-1-1 čl. 7.2(3), lze předpokládat lineární dotvarování. Pokud napětí v betonu překročí k2fck, je třeba uvažovat nelineární dotvarování (viz EN 1992-1-1 čl. 3.1.4). V IDEA StatiCa Detail lze předpokládat pouze lineární dotvarování podle EN 1992-1-1 čl. 3.1.4 (3) (viz Materiálové modely (EN)).
Nepřijatelné trhliny nebo deformace lze považovat za vyloučené, pokud při charakteristické kombinaci zatížení tahové napětí ve vyztužení nepřekročí k3fyk (EN 1992-1-1 čl. 7.2 (5)). Únosnost vyztužení je vyhodnocena jako poměr mezi napětím ve vyztužení v trhlinách σs = σsr a stanovenou limitní hodnotou σs,lim:
\[\frac{σ_{s}}{σ_{s,lim}}\]
\[σ_{s,lim} = k_3\cdot f_{yk}\]
kde:
fyk mez kluzu vyztužení,
k3 =0,8.
Průhyb
Průhyby lze posuzovat pouze pro stěny nebo izostatické (staticky určité) nebo hyperstatické (staticky neurčité) nosníky. V těchto případech se uvažuje absolutní hodnota průhybů (ve srovnání s počátečním stavem před zatížením) a maximální přípustnou hodnotu průhybů musí stanovit uživatel. Průhyby na oříznutých koncích nelze posuzovat, protože se jedná o v podstatě nestabilní konstrukce, kde je rovnováha zajištěna přidáním koncových sil, a průhyby jsou proto nerealistické. Krátkodobý průhyb uz,st nebo dlouhodobý průhyb uz,lt lze vypočítat a porovnat s uživatelem definovanými limitními hodnotami:
\[\frac{u_ z}{u_{z,lim}}\]
kde:
uz krátkodobý nebo dlouhodobý průhyb vypočtený analýzou metodou konečných prvků,
uz,lim limitní hodnota průhybu definovaná uživatelem.
Šířka trhlin
Šířky a orientace trhlin jsou počítány pouze pro dlouhodobé účinky (s použitím Ec,eff) pro kombinace, ve kterých je vyhodnocení šířky trhlin povoleno. Ověření na základě uživatelem zadaných limitních hodnot v souladu s Eurocode jsou prezentována takto:
\[\frac{w}{w_{lim}}\]
kde:
w šířka trhliny vypočtená analýzou metodou konečných prvků,
wlim limitní hodnota šířky trhliny definovaná uživatelem.
Existují dva způsoby výpočtu šířek trhlin (stabilizované a nestabilizované trhliny). V obecném případě (stabilizované trhliny) se šířka trhliny vypočítá integrací přetvoření na 1D prvcích výztužných prutů. Směr trhliny je pak vypočten ze tří nejbližších (od středu daného 1D konečného prvku vyztužení) integračních bodů 2D prvků betonu. Ačkoli tento přístup k výpočtu směrů trhlin neodpovídá skutečné poloze trhlin, poskytuje reprezentativní hodnoty, které vedou k výsledkům šířky trhlin, jež lze porovnat s hodnotami šířky trhlin požadovanými normou v poloze výztužného prutu.
5 Structural verifications according to ACI 318-19
Assessment of the structure using the CSFM is performed by two different analyses: one for serviceability, and one for strength load combinations. The serviceability analysis assumes that the behavior under factored loads is satisfactory, and the yield conditions of the material will not be reached at serviceability load levels. This approach enables the use of simplified constitutive models (with a linear branch of concrete stress-strain diagram) for serviceability analysis to enhance numerical stability and calculation speed.
CSFM is in accordance with ACI 318-19, chapter 6.8.1.1. In order for the CSFM to meet the requirements from ACI 318-19 Section 6.8.1.2, a lot of verification testing was done at various universities. Individual articles summarizing the results of verification and validation can be found at the following link.
5.1 Modely materiálů (ACI)
Beton - Pevnost
Model betonu implementovaný pro výpočty pevnosti v CSFM je založen na parabolicko-plastické křivce napětí-přetvoření betonu podle parabolické křivky napětí-přetvoření Portland Cement Association popsané v PCA's Notes on ACI 318-99 Building Code Requirements for Structural Concrete, Figure 6-8. Pevnost v tahu je zanedbána, jak je tomu v klasickém návrhu železobetonových konstrukcí.
\[ \textsf{\textit{\footnotesize{Fig. 38\qquad The stress-strain diagram of concrete for Strength analysis}}}\]
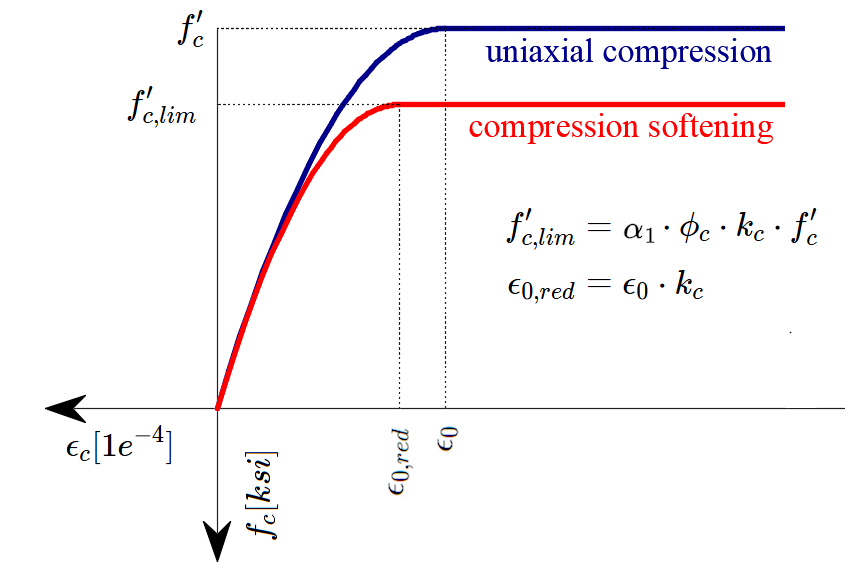
Implementace CSFM v IDEA StatiCa Detail neuvažuje explicitní kritérium porušení z hlediska přetvoření betonu v tlaku (tj. po dosažení maximálního napětí uvažuje plastickou větev s εc0 s maximální hodnotou 5 %, zatímco ACI 318-19 Cl. 22.2.2.1 předpokládá mezní přetvoření menší než 0,3 %). Toto zjednodušení neumožňuje ověřit deformační kapacitu konstrukcí porušovaných tlakem. Pevnost je však správně předpovězena, pokud je kromě součinitele trhlinami oslabeného betonu (kc2 definovaného na (Obr. 39)) zohledněn nárůst křehkosti betonu s rostoucí pevností pomocí redukčního součinitele \(\eta_{fc}\) definovaného v fib Model Code 2010 takto:
\[f'_{c,lim}=\alpha_{1}\cdot\phi_{c}\cdot k_{c}\cdot f'_{c}\]
\[k_{c}=\eta_{fc}\cdot k_{c2}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f'_{c}}}}} \right)^{\frac{1}{3}}} \le 1\]
kde:
α1 je redukční součinitel tlakové pevnosti betonu definovaný v ACI 318-19 Cl. 22.2.2.4.1. Při použití parabolicko-obdélníkového diagramu napětí-přetvoření je nutné snížit maximální tlakové napětí tímto součinitelem. Tím se zprůměruje rozložení napětí v tlačené zóně tak, aby výsledná tlaková pevnost byla menší nebo rovna tlakové pevnosti vypočtené pomocí diagramu napětí-přetvoření s klesající plastickou větví.
Φc je součinitel snížení pevnosti betonu. Výchozí hodnota je nastavena podle ACI 318-19 Table 24.2.1 (b)(f).
kc2 je redukční součinitel zohledňující přítomnost příčných trhlin.
f'c je válcová pevnost betonu (v MPa pro definici \( \eta_{fc} \)).
\[ \textsf{\textit{\footnotesize{Fig. 39\qquad The compression softening law.}}}\]
kc2 je redukční součinitel vycházející ze stejných předpokladů jako součinitel uzlové oblasti βn uvedený v ACI 318-19 Table 23.9.2, s tím rozdílem, že v CSFM je přítomnost hlavního tahového napětí kolmého na hlavní tlakové napětí kontrolována pro každý konečný prvek (nejen pro uzly modelu vzpěra-táhlo).
Beton – Použitelnost
Analýza použitelnosti obsahuje určitá zjednodušení konstitutivních modelů používaných pro analýzu pevnosti. Plastická větev křivky napětí-přetvoření betonu v tlaku je zanedbána, zatímco elastická větev je lineární a neomezená. Zákon tlakového změkčení není uvažován. Tato zjednodušení zvyšují numerickou stabilitu a rychlost výpočtu a nesnižují obecnost řešení, pokud jsou výsledné limity napětí materiálu při použitelnosti zřetelně pod mezí kluzu (jak vyžaduje ACI). Zjednodušené modely používané pro použitelnost jsou proto platné pouze tehdy, jsou-li splněny všechny požadavky na ověření.
\[ \textsf{\textit{\footnotesize{Fig. 40\qquad Concrete stress-strain diagrams implemented for serviceability analysis: short- and long-term verifications.}}}\]
Dlouhodobé účinky
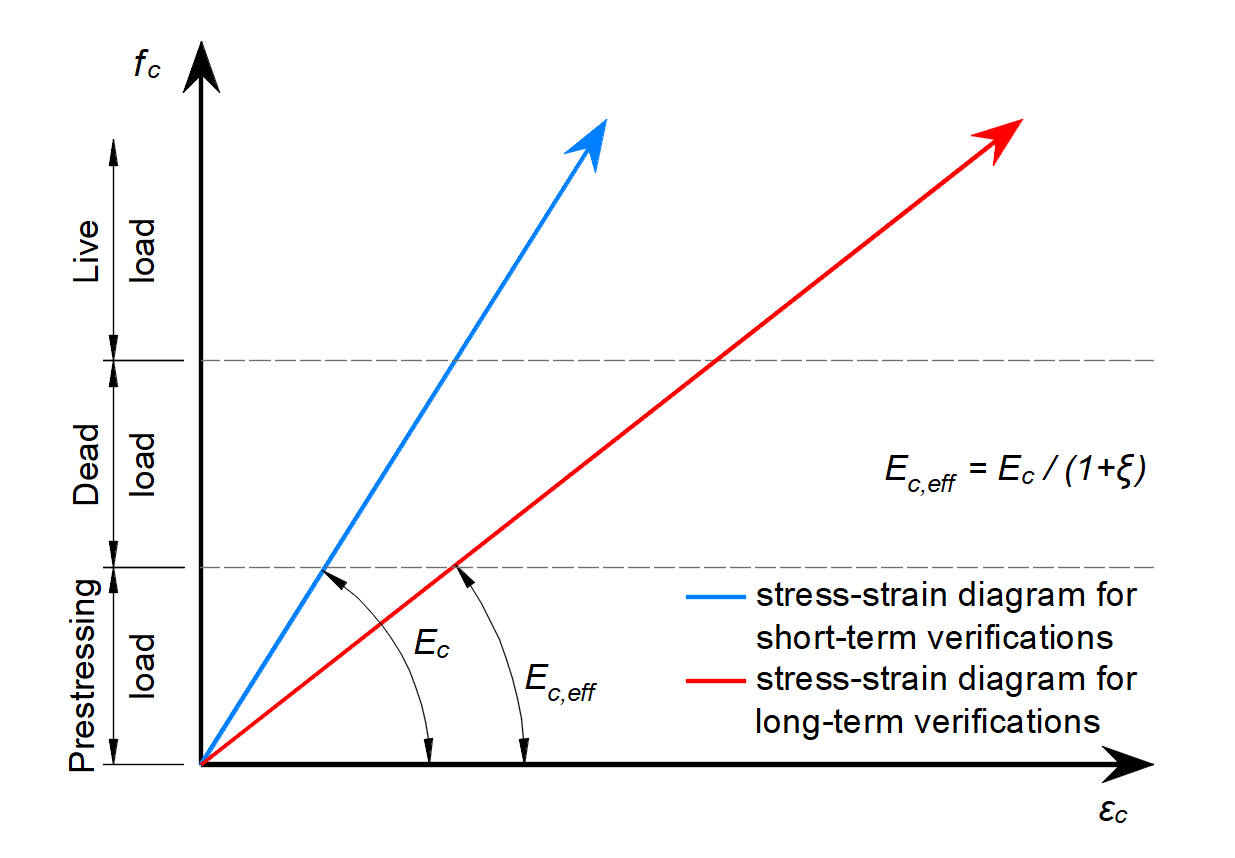
Dlouhodobé chování konstrukce, jako jsou dlouhodobé průhyby nebo výpočet šířky trhlin způsobených trvalým zatížením, je ovlivněno dotvarováním betonu. ACI 318-19 v odstavci 24.2.4.1.3 definuje časově závislý součinitel pro trvalá zatížení – ξ představující vliv dotvarování pro stanovenou dobu trvání trvalého zatížení.
V aplikaci Detail je modul pružnosti Ec upraven pro stanovení dlouhodobého chování konstrukce pomocí součinitele ξ. Upravený modul pružnosti je označován jako Ec,eff – viz Obrázek 40.
Za předpokladu, že deformace prvku je vyjádřena přetvořením, lze psát:
\[\epsilon_{tot} = \epsilon_{0} + \epsilon_{creep} = \epsilon_{0} \cdot (1+\xi)\]
kde:
ε0 je krátkodobé přetvoření (bez vlivu dotvarování) a εcreep je přetvoření způsobené dotvarováním.
Pomocí Hookova zákona lze psát:
\[E_{c,eff} = \frac{f_{c}}{\epsilon_{tot}}\]
Dosazením za \(\epsilon_{tot} = \epsilon_{0} \cdot (1+\xi)\) a \(\epsilon_{0} = f_{c} / E_{c}\) dostaneme:
\[E_{c,eff} = \frac{E_{c}}{1+\xi}\]
Dobu trvání trvalého zatížení pro stanovení součinitele ξ lze nastavit individuálně pro každou provozní dlouhodobou kombinaci.
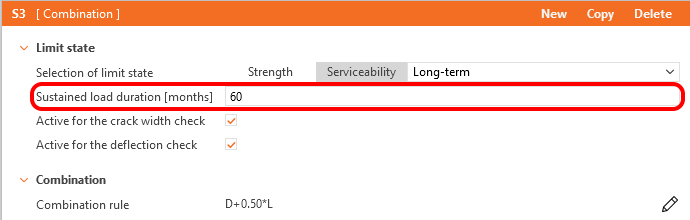
\[ \textsf{\textit{\footnotesize{Fig. 41\qquad Sustained load duration}}}\]
Časově závislé průhyby, napětí a šířky trhlin jsou poté vypočteny s upraveným modelem materiálu, kde je vliv dotvarování v tlaku automaticky zohledněn povahou analýzy MKP. Není proto nutné je dále násobit součinitelem definovaným v 24.2.4.1.1.
Krátkodobé účinky
Pro provedení krátkodobých ověření je proveden další výpočet, ve kterém jsou všechna zatížení vypočtena bez časově závislého součinitele pro trvalá zatížení. Oba výpočty pro dlouhodobá a krátkodobá ověření jsou znázorněny na Obr. 40.
Vyztužení
Uvažuje se dokonale elasto-plastický diagram napětí-přetvoření s definovanou mezí kluzu pro předpjatou výztuž, viz ACI 319-19 CL. 20.2.1. Definice tohoto diagramu vyžaduje pouze znalost základních vlastností výztuže – pevnosti a modulu pružnosti.
Diagram napětí-přetvoření výztuže může být také definován uživatelem, v takovém případě však nelze předpokládat tahové zpevnění (nelze vypočítat šířku trhlin).
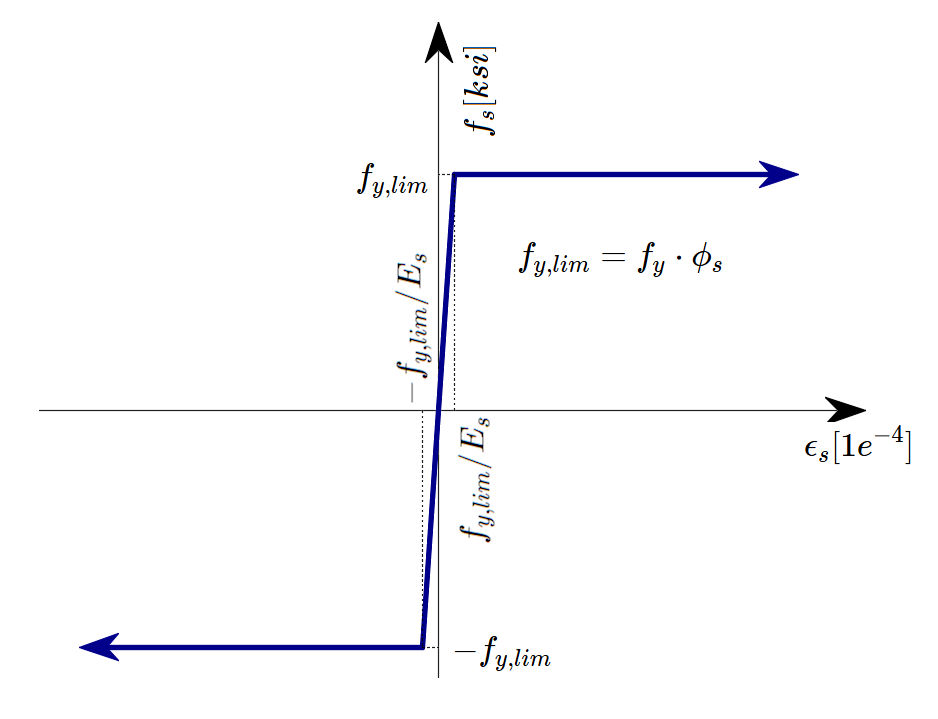
\[ \textsf{\textit{\footnotesize{Fig. 42 \qquad Stress-strain diagram of reinforcement}}}\]
kde:
Φs je součinitel snížení pevnosti výztuže. Výchozí hodnota je nastavena podle ACI 318-19 Table 24.2.1.
fy je mez kluzu výztuže
Es modul pružnosti výztuže
10 % je zvoleno jako mezní přetvoření, při kterém je výpočet zastaven. Toto je považováno za bezpečné na základě ASTM A955/A955M-20c Article 7.
Tahové zpevnění (Obr. 43) je automaticky zohledněno úpravou vstupního diagramu napětí-přetvoření holé výztužné tyče tak, aby byla zachycena průměrná tuhost tyčí zabetonovaných v betonu (εm).
\[ \textsf{\textit{\footnotesize{Fig. 43\qquad Scheme of tension stiffening.}}}\]
5.2 Součinitele snížení únosnosti a zatížení
Compatible Stress Field Method je v souladu s moderními návrhových normami. Protože výpočetní modely využívají pouze standardní vlastnosti materiálů, lze bez jakékoli úpravy použít formát dílčích součinitelů bezpečnosti předepsaný v návrhových normách. Vstupní zatížení jsou tak násobena součiniteli a charakteristické vlastnosti materiálů jsou redukovány příslušnými součiniteli snížení únosnosti, přesně jako v konvenční analýze betonu.
Hodnoty součinitelů snížení únosnosti jsou předepsány v ACI 318-19 čl. 21.2. Výchozí hodnoty pro beton a vyztužení jsou zvoleny na základě předpokladu, že typický příklad řešený v aplikaci je řízen smykem (podle tabulky 21.2.1 (b), (f), (g)). Je však možné modelovat jakýkoli typ prvku. Pokud je tedy posuzován prvek řízený tlakem nebo tahem, má uživatel možnost změnit hodnotu součinitele snížení únosnosti v Předvolbách.
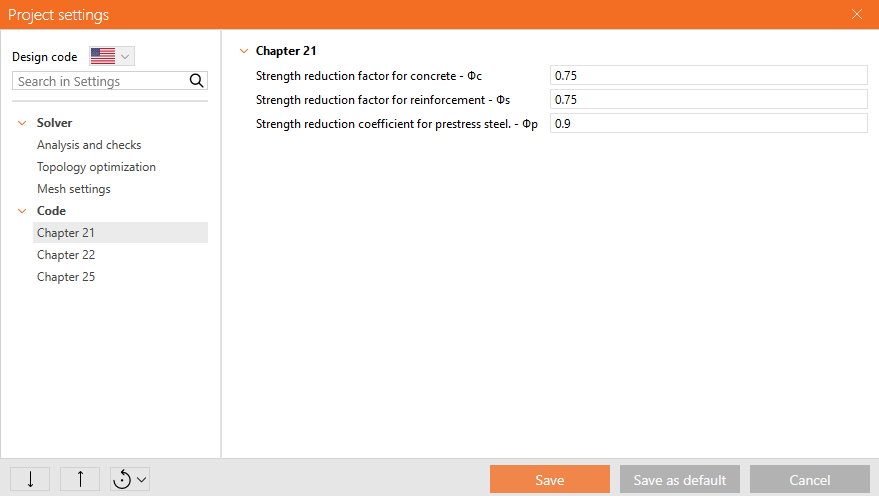
\[ \textsf{\textit{\footnotesize{Fig. 44\qquad The setting of strength reduction factors in IDEA StatiCa Detail.}}}\]
Součinitele zatížení pro kombinace únosnosti musí být definovány podle ACI 318-19 tabulky 5.3.1.
S výjimkou ustanovení v kapitole 34 nejsou v ACI 318-19 definovány kombinace zatížení na úrovni provozního stavu. Doporučuje se použít pravidla kombinací podle přílohy C normy ASCE/SEI 7-16. Pro všechny šablony jsou součinitele zatížení již předdefinovány.
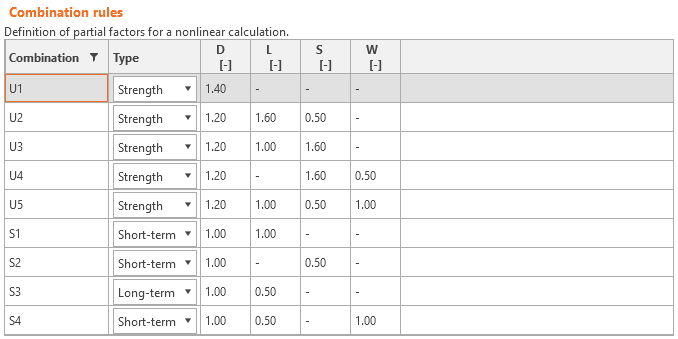
\[ \textsf{\textit{\footnotesize{Fig. 45\qquad The setting of load factors in Idea StatiCa Detail.}}}\]
5.3 Ověření únosnosti
Různá ověření požadovaná normou ACI 318-19 jsou posuzována na základě přímých výsledků poskytnutých modelem. Ověření jsou prováděna pro únosnost betonu, únosnost vyztužení a kotvení (soudržnostní smykové napětí).
Únosnost betonu v tlaku je hodnocena jako poměr mezi maximálním hlavním tlakovým napětím fc (také σ2 v pomocných výsledcích) získaným z analýzy MKP a limitní hodnotou f'c,lim.
Únosnost vyztužení je hodnocena jak v tahu, tak v tlaku jako poměr mezi napětím ve výztuži v trhlinách fs a stanovenou limitní hodnotou fy,lim.
Soudržnostní smykové napětí je hodnoceno samostatně jako poměr mezi soudržnostním napětím τb vypočteným analýzou MKP a pevností v soudržnosti fbu.
Norma ACI se však pevností v soudržnosti explicitně nezabývá, ale pracuje s výpočtem tzv. kotevní délky, která je popsána v oddíle 25.4.2. Protože pevnost v soudržnosti je základním vstupním parametrem pro stanovení kotevní délky, viz R25.4.1.1 a ACI Committee 408 1966, lze pevnost v soudržnosti vypočítat takto:
Předpokládejme, že pokud zakotvíme výztužný prut do betonového bloku na kotevní délku ld nebo větší, vytažení výztuže povede k přetržení výztuže, nikoli k vytažení z betonu. To lze zapsat následujícím vzorcem.
\[\pi\cdot d_{b} \cdot l_{d} \cdot f_{bu}=f_{y}\cdot A_{s}\]
kde:
db je průměr výztužného prutu, ld je kotevní délka, fbu je pevnost v soudržnosti, fy je mez kluzu výztuže a As je průřezová plocha výztužného prutu.
Z výše uvedeného lze snadno odvodit vzorec pro výpočet pevnosti v soudržnosti:
\[f_{bu}=\frac{f_{y}\cdot A_{s}}{\pi\cdot d_{b} \cdot l_{d} }\]
Kotevní délka ld se pak stanoví podle ACI 318-19 tabulky 25.4.2.3 takto:
\[l_{d}=\left( \frac{f_{y}\cdot\psi_{t}\cdot\psi_{e}\cdot\psi_{g}}{C\cdot\lambda\sqrt{f'_{c}}} \right)\cdot d_{b}\]
kde:
C = 25 (2,1 pro metrické jednotky) pro pruty č. 6 a menší a tvarované dráty, C = 20 (1,7 pro metrické jednotky) pro pruty č. 7 a větší, λ = 1,0 pro beton normální hmotnosti, ψt, ψe, ψg jsou stanoveny podle ACI 318-19 tabulky 25.4.2.3.
Podporována je pouze nepovlakovaná nebo pozinkovaná výztuž, takže ψe = 1,0. ψg je automaticky stanoveno z třídy výztuže a ψt je automaticky odvozeno z polohy výztuže v modelu a ze směru betonáže, který lze v aplikaci nastavit pro každou položku projektu takto.
\[ \textsf{\textit{\footnotesize{Fig. 46\qquad Direction of concreting}}}\]
Tato ověření jsou prováděna s ohledem na příslušné limitní hodnoty pro jednotlivé části konstrukce (tj. přestože je použita jediná třída betonu i výztuže, výsledné diagramy napětí-přetvoření se v každé části konstrukce budou lišit v důsledku efektů tahového zpevnění a tlakového změkčení).
Existuje také možnost modelovat hladké pruty. Více informací naleznete zde: Hladké pruty v Detail
Celková síla Ftot a limitní síla Flim
Celková síla Ftot je výsledkem analýzy metodou konečných prvků a lze ji definovat dvěma způsoby.
\[F_{tot}=A_{s} \cdot f_{s}\]
kde As je průřezová plocha výztužného prutu a fs je napětí v prutu.
Nebo jako součet kotvící síly Fa a soudržnostní síly Fbond.
\[F_{tot}=F_{a}+F_{bond}\]
kde Fa je skutečná síla v kotvící pružině a Fbond je soudržnostní síla, kterou lze získat integrací soudržnostního napětí τb podél délky výztužného prutu l.
\[F_{bond}=C_{s} \cdot \int_{0}^{l}\tau_{b}\left( x \right)dx\]
Cs je obvod výztužného prutu.
Limitní síla Flim je maximální síla v prvku výztuže s ohledem na únosnost prutu a také na podmínky kotvení (soudržnost mezi betonem a výztuží a kotvící háky, smyčky atd.).
\[F_{lim}=min\left( F_{lim,bond}+F_{au},F_{u} \right)\]
\[F_{u}=f_{y,lim}\cdot A_{s}\]
\[F_{au}=\beta\cdot f_{y,lim}\cdot A_{s}\]
\[F_{lim,bond}=C_{s}\cdot l \cdot f_{bu}\]
kde Cs je obvod výztužného prutu a l je délka od začátku prutu k posuzovanému místu.
\[ \textsf{\textit{\footnotesize{Fig. 47\qquad Definition of the limit force Flim}}}\]
\[F_{lim,2}=F_{lim,1}+F_{lim,add}\]
kde Flim,add je přídavná síla vypočtená z velikosti úhlu mezi sousedními prvky. Flim,2 musí být vždy menší než Fu.
Dostupné typy kotvení v CSFM zahrnují přímý prut (tj. bez redukce kotevního konce), hák 90°, hák 180°, dokonalou soudržnost a průběžný prut. Všechny tyto typy spolu s příslušnými kotvícími koeficienty β jsou znázorněny na obr. 48 pro podélnou výztuž. Hodnoty použitých kotvících koeficientů jsou odvozeny z porovnání rovnice z oddílu ACI 318-19 25.4.3.1 a rovnic z oddílu ACI 318-19 25.4.2.3. Je třeba poznamenat, že přes různé dostupné možnosti CSFM rozlišuje tři typy kotevních konců: (i) bez redukce kotevní délky, (ii) redukce o 30 % kotevní délky v případě normalizovaného kotvení a (iii) dokonalá soudržnost.

\[ \textsf{\textit{\footnotesize{Fig. 48\qquad Available anchorage types and respective anchorage coefficients for longitudinal reinforcing bars in CSFM:}}}\]
\[ \textsf{\textit{\footnotesize{(a) straight bar; (b) 90-degree hook; (c) 180-degree hook; (d) perfect bond; (e) continuous bar}}}\]
Kotvící koeficient pro třmínky je vždy β = 1,0.
Aby byl splněn požadavek normy ACI, musí být ve výpočtu použita kotvící pružina; kotvící pružina je upravena koeficientem β, takže uživatel musí při definování počátečních a koncových podmínek výztuže použít jeden z dostupných typů kotvení.
5.4 Ložiskové a kotevní zóny – Částečně zatížené plochy
Při navrhování betonových konstrukcí se setkáváme se dvěma velkými skupinami částečně zatížených ploch (PLA) – první z nich tvoří ložiska, zatímco druhou tvoří kotevní oblasti.
Podle aktuálně platných norem pro navrhování železobetonových konstrukcí ACI 318-19 kap. 22.8 je třeba u ložisek uvažovat místní drcení betonu a příčné tahové síly. Pro rovnoměrně rozložené zatížení na ploše Ac1 lze tlakovou únosnost betonu zvýšit až dvojnásobně v závislosti na návrhové rozdělovací ploše Ac2. Viz tabulka ACI 318-19 22.8.3.2.
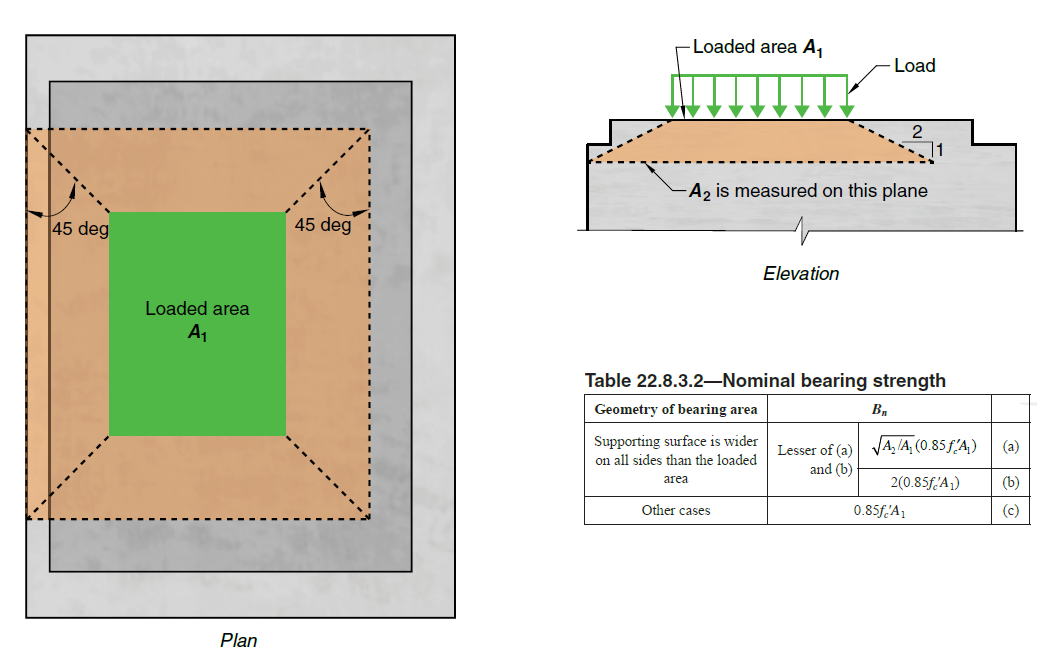
\[ \textsf{\textit{\footnotesize{Fig. 49\qquad Partially loaded areas for bearings according to ACI 318-19}}}\]
Pro kotevní zóny s dodatečným předpětím je třeba postupovat podle ACI 318-19 kap. 25.9.
Částečně zatížená plocha musí být dostatečně vyztužena příčnou výztuží navrženou k přenosu štěpných sil, které v dané oblasti vznikají. Bez požadované příčné výztuže nelze uvažovat se zvýšením tlakové únosnosti betonu.
Částečně zatížené plochy v CSFM
\[ \textsf{\textit{\footnotesize{Fig. 50\qquad Fictitious struts with concrete finite element mesh.}}}\]
Pomocí CSFM je možné navrhovat a posuzovat železobetonové konstrukce s uvažováním vlivu zvýšené tlakové únosnosti betonu v částečně zatížených plochách. Protože CSFM je stěnový (2D) model a částečně zatížené plochy jsou prostorovou (3D) úlohou, bylo nutné nalézt řešení, které tyto dva různé typy úloh kombinuje (Fig. 50). Je-li aktivována funkce „částečně zatížené plochy", vytvoří se přípustná geometrie kužele podle ACI (Fig. 49). Veškeré geometrické kolize jsou plně řešeny ve 3D pro zadanou geometrii betonového prvku a rozměry každé PLA. Následně je vytvořen výpočetní model částečně zatížené plochy.
\[ \textsf{\textit{\footnotesize{Fig. 51\qquad Allowable cone geometries.}}}\]
Úprava materiálového modelu se ukázala jako nevhodný přístup, a to především proto, že mapování vlastností na síť konečných prvků je problematické. Bylo zjištěno, že vhodnějším řešením je přístup nezávislý na síti konečných prvků. Pro známou geometrii tlakového kužele jsou vytvořeny absolutně soudržné fiktivní tlaková vzpěra (Fig. 51 a Fig. 52). Tyto vzpěry mají stejné materiálové vlastnosti jako beton použitý v modelu, včetně diagramu napětí-přetvoření. Tvar kužele určuje směr vzpěr, které postupně rozdělují zatížení z PLA na návrhovou rozdělovací plochu. Plošná hustota fiktivních vzpěr je v každé části kužele proměnná a přidává fiktivní betonovou plochu ve směru zatížení. Na úrovni zatížené plochy (Ac1) je přidána fiktivní plocha betonu podle poměru \(\sqrt{A_{c1} \cdot A_{c2}} - A_{real}\) (kde Areal je plocha podpory uvažovaná ve 2D výpočetním modelu) a tato plocha lineárně klesá na nulu směrem k návrhové rozdělovací ploše (Ac2). Toto řešení zajišťuje, že tlakové napětí v betonu je konstantní v celém objemu kužele.
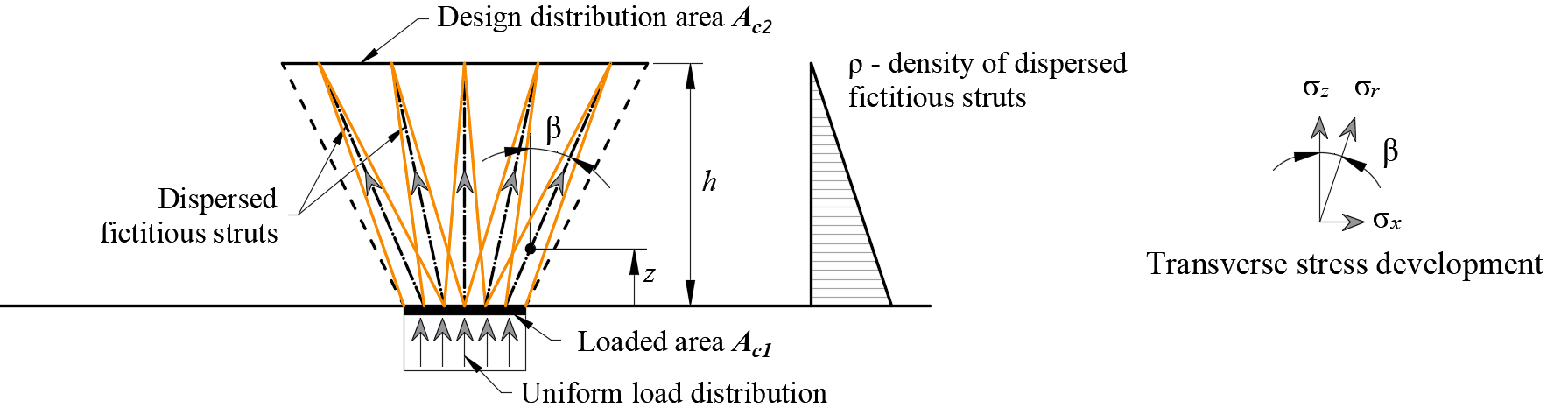
\[\rho \left( {\beta ,z} \right) = \left( {\sqrt {\frac{A_{c2}}{A_{c1}}} - \frac{A_{real}}{A_{c1}}} \right)\,\cdot\,\left( {1 - \frac{z}{h}} \right)\,\cdot\,\frac{1}{{\cos \beta }}\]
\[ \textsf{\textit{\footnotesize{Fig. 52\qquad Fictitious struts in the computational model}}}\]
Únosnost částečně zatížené plochy je zvýšena podle poměru návrhové rozdělovací plochy a zatížené plochy stanoveného v ACI 318-19 kap. 22.8. Je třeba mít na paměti, že se jedná o návrhový model, který nemůže přesně popsat stav napětí v částečně zatížené ploše, jehož skutečný průběh je mnohem složitější. Toto řešení však umožňuje správné rozdělení zatížení do celého modelu při respektování zvýšené únosnosti částečně zatížené plochy. Navíc správně zavádí příčná napětí v této oblasti pro správný návrh vyztužení na štěpné síly.
Přípustné napětí v ložisku 0,85fc' je uvedeno v tabulce 22.8.3.2. Hustota je omezena tak, aby nebyla překročena maximální dvojnásobná únosnost uvedená ve vzorci v tabulce 22.8.3.2(b).
Pro kotevní zóny se PLA v aplikaci používá stejným způsobem jako pro ložiska. Proto musí být místní zóny definované v ACI 318-19 kapitola 25.9 posouzeny ručně podle ACI 318-19 25.9.3. PLA se tedy používá pouze k tomu, aby nedošlo k překročení kritéria přetvoření v místní zóně a tím k předčasnému ukončení výpočtu. Na druhou stranu, podle ACI 318-19, čl. 25.9.4.3.1 (b), lze vyztužení odolávající rozrážecím a odlupovacím napětím v rovině přímo a výhodně ověřit v aplikaci.
5.5 Posouzení mezního stavu použitelnosti
Posouzení použitelnosti se provádí pro omezení napětí, šířku trhlin a omezení průhybů. Napětí jsou posuzována v betonových a výztužných prvcích podle ACI 318-19 obdobným způsobem jako při posouzení únosnosti.
Omezení napětí
Přípustná tlaková napětí v betonu při provozním zatížení musí být ověřena pro předpjaté prvky třídy U a T. Na základě tabulky R24.5.2.1 není vyžadováno posouzení omezení napětí pro beton, u kterého se předpokládá vznik trhlin. Uživatel musí nastavit třídu předpjatého prvku v nastavení návrhového prvku.
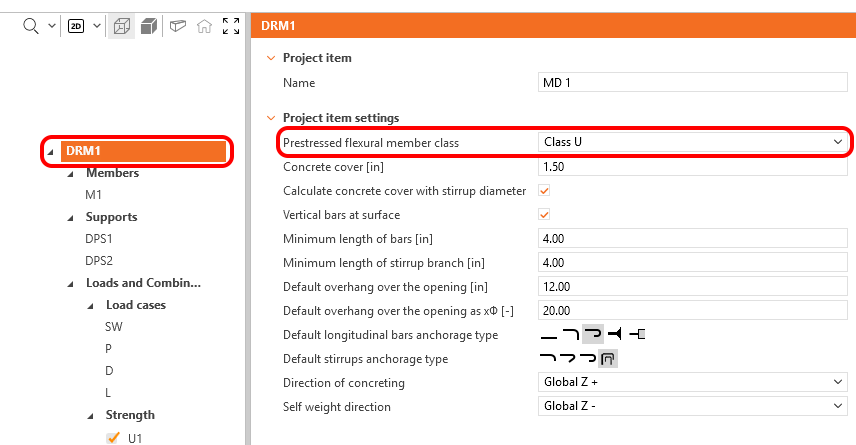
\[ \textsf{\textit{\footnotesize{Fig. 53\qquad Prestressed flexural member class selection}}}\]
Přípustné tlakové napětí pro prvky vystavené přechodným zatížením je stanoveno normou ACI 318-19 24.5.4.1 jako 0,6fc'. Limit tlakového napětí 0,45fc' byl stanoven za účelem snížení pravděpodobnosti poruchy předpjatých betonových prvků vlivem opakovaného zatížení. Tento limit se rovněž jevil jako přiměřený pro zamezení nadměrných přetvoření od dotvarování. Při vyšších hodnotách napětí mají přetvoření od dotvarování tendenci rychleji narůstat s rostoucím napětím.
Napětí v betonu v tlaku je vyhodnoceno jako poměr mezi maximálním hlavním tlakovým napětím fc = σc2 získaným z analýzy metodou konečných prvků pro mezní stav použitelnosti a limitní hodnotou, která je stanovena na základě tabulky 24.5.4.1.
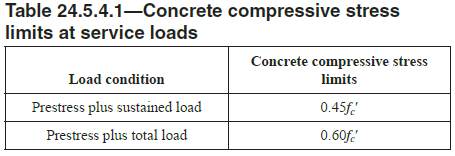
\[ \textsf{\textit{\footnotesize{Fig. 54\qquad Concrete compressive stress limits at service loads}}}\]
V aplikaci je Předpětí plus trvalé zatížení považováno za dlouhodobou kombinaci a Předpětí plus celkové zatížení za krátkodobou kombinaci.
Průhyb
Na základě zvoleného typu kombinace (dlouhodobá nebo krátkodobá) je vyhodnocen buď dlouhodobý, nebo krátkodobý průhyb. Maximální přípustná hodnota průhybu musí být stanovena uživatelem a musí být zohledněna v souladu s ACI 138-19 24.2.

\[ \textsf{\textit{\footnotesize{Fig. 55\qquad Maximum allowable deflection value}}}\]
V aplikaci je možné zobrazit průhyby od stálého zatížení ΔDL a od proměnného zatížení ΔLL samostatně, jakož i celkový průhyb ΔTot (stálé+proměnné), a to vše při zobrazení deformovaného tvaru.
Průhyby na zkrácených koncích nelze posuzovat.
Šířka trhlin
Šířky trhlin a orientace trhlin jsou vypočítány pro krátkodobé nebo dlouhodobé kombinace mezního stavu použitelnosti. Protože ACI přímo nepředepisuje limitní šířky trhlin, musí uživatel zadat limitní šířku trhliny wlim.
Posouzení je prezentováno následovně:
\[\frac{w}{w_{lim}}\]
kde:
w krátkodobá nebo dlouhodobá šířka trhliny vypočítaná analýzou metodou konečných prvků,
wlim limitní hodnota šířky trhliny definovaná uživatelem.
Metoda výpočtu šířek trhlin použitá v aplikaci, podrobněji popsaná v tomto dokumentu, je v souladu s ACI 224R-01. Je proto možné použít tabulku 4.1 normy ACI 224R-01 pro stanovení limitní hodnoty šířek trhlin.
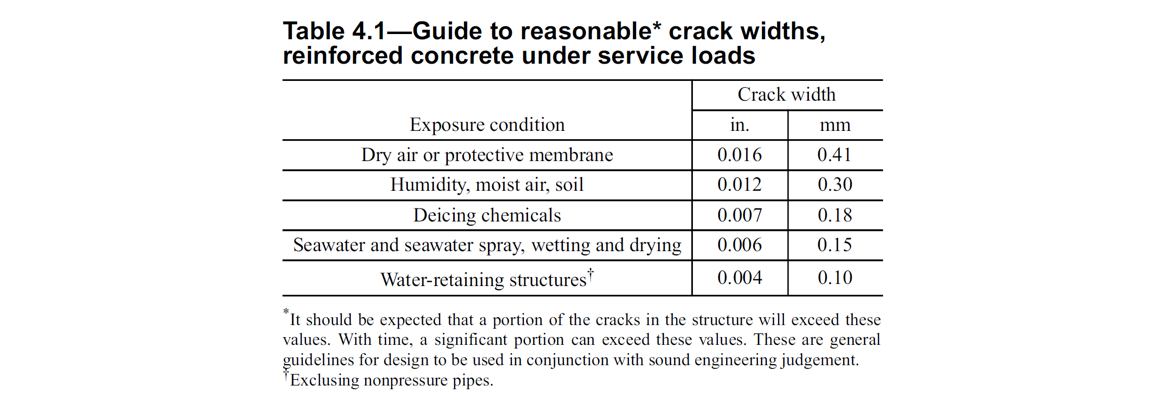
\[ \textsf{\textit{\footnotesize{Fig. 56\qquad Reasonable crack widths for reinforced concrete under service load}}}\]
Existují dva způsoby výpočtu šířek trhlin (stabilizované a nestabilizované trhliny). V obecném případě (stabilizované trhliny) je šířka trhliny vypočítána integrací přetvoření na 1D prvcích výztužných prutů. Směr trhliny je poté vypočítán ze tří nejbližších (od středu daného 1D konečného prvku výztuže) integračních bodů 2D betonových prvků. Ačkoli tento přístup k výpočtu směrů trhlin neodpovídá skutečné poloze trhlin, poskytuje reprezentativní hodnoty, které vedou k výsledkům šířek trhlin srovnatelným s hodnotami šířek trhlin požadovanými normou v místě výztužného prutu.
6 Structural verifications according to AASHTO
6.1 Modely materiálů (AASHTO)
Beton - Únosnost
Model betonu implementovaný pro výpočty únosnosti v CSFM vychází z předpokladů návrhu únosnosti AASHTO LRFD – rovnováhy a kompatibility přetvoření. V souladu s AASHTO LRFD (2024) článkem 5.6.2.1 je tahová pevnost betonu zanedbána.
\[ \textsf{\textit{\footnotesize{Fig. 57\qquad The stress-strain diagram of concrete for Strength analysis}}}\]
Implementace CSFM v IDEA StatiCa Detail neuvažuje explicitní kritérium porušení z hlediska přetvoření betonu v tlaku (tj. po dosažení maximálního napětí uvažuje plastickou větev s εc0 s maximální hodnotou 5 %, zatímco AASHTO LRFD (2024) článek 5.6.2.1 předpokládá mezní přetvoření menší než 0,3 %). Toto zjednodušení neumožňuje ověřit deformační kapacitu konstrukcí porušovaných tlakem. Únosnost je však správně předpovězena, pokud se vedle součinitele trhlinami oslabeného betonu (kc2 definovaného na obr. 57) zohlední nárůst křehkosti betonu s rostoucí pevností pomocí redukčního součinitele \(\eta_{fc}\) definovaného v fib Model Code 2010 takto:
\[f'_{c,lim}=\alpha_{1}\cdot\phi_{c}\cdot k_{c}\cdot f'_{c}\]
\[k_{c}=\eta_{fc}\cdot k_{c2}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f'_{c}}}}} \right)^{\frac{1}{3}}} \le 1\]
kde:
α1 je redukční součinitel tlakové pevnosti betonu definovaný v AASHTO LRFD (2024) článku 5.6.2.2. Při použití diagramu napětí-přetvoření ve tvaru paraboly-obdélníku je nutné snížit maximální tlakové napětí tímto součinitelem. Tím se zprůměruje rozložení napětí v tlačené zóně tak, aby výsledná tlaková únosnost byla menší nebo rovna tlakové únosnosti vypočtené pomocí diagramu napětí-přetvoření s klesající plastickou větví.
Φc je součinitel únosnosti betonu. Výchozí hodnota je nastavena podle AASHTO LRFD (2024) článku 5.5.4.2.
kc2 je redukční součinitel zohledňující přítomnost příčných trhlin.
f'c je válcová pevnost betonu (v MPa pro definici \( \eta_{fc} \)).
\[ \textsf{\textit{\footnotesize{Fig. 58\qquad The compression softening law.}}}\]
kc2 je redukční součinitel vycházející ze stejných předpokladů jako součinitel účinnosti betonu ν uvedený v AASHTO LRFD (2024) 5.8.2.5.3a a tabulce 5.8.2.5.3a-1, s tím rozdílem, že v CSFM je přítomnost hlavního tahového napětí kolmého na hlavní tlakové napětí ověřována pro každý konečný prvek (nejen pro uzly modelu vzpěra-táhlo).
Beton – Použitelnost
Analýza použitelnosti obsahuje určitá zjednodušení konstitutivních modelů používaných pro analýzu únosnosti. Plastická větev diagramu napětí-přetvoření betonu v tlaku je zanedbána, zatímco elastická větev je lineární a neomezená. Zákon tlakového změkčení není uvažován. Tato zjednodušení zvyšují numerickou stabilitu a rychlost výpočtu a nesnižují obecnost řešení, pokud jsou výsledné limity napětí materiálu při použitelnosti zřetelně pod mezí kluzu (v souladu s přístupem mezního stavu použitelnosti AASHTO LRFD). Zjednodušené modely používané pro použitelnost jsou proto platné pouze tehdy, jsou-li splněny všechny požadavky na ověření.

\[ \textsf{\textit{\footnotesize{Fig. 59\qquad Concrete stress-strain diagrams implemented for serviceability analysis: short- and long-term verifications.}}}\]
Dlouhodobé účinky
Dlouhodobý konstitutivní zákon (červená křivka na obr. 59) se používá pro výpočet šířky trhlin, celkového průhybu a omezení napětí předpjatých prvků, je-li v horním panelu nástrojů vybrán dlouhodobý účinek. V aplikaci IDEA StatiCa Detail se pro ověření dlouhodobých účinků používá efektivní modul pružnosti, jak je uvedeno v AASHTO LRFD (2024) C5.12.5.3.6-1.
\[E_{eff} = \frac{E_{c}}{1+\psi}\]
kde:
Ec je modul pružnosti definovaný v AASHTO LRFD (2024) článku 5.4.2.4
ψ je součinitel dotvarování definovaný v AASHTO LRFD (2024) článku 5.4.2.3.2
Součinitele dotvarování jsou uživatelem definovány ve vlastnostech materiálu.
Krátkodobé účinky
Pro provedení krátkodobých ověření se provádí další výpočet, ve kterém jsou všechna zatížení počítána bez součinitele dotvarování. Oba výpočty pro dlouhodobá a krátkodobá ověření jsou znázorněny na obr. 59.
Vyztužení
Uvažuje se dokonale elasto-plastický diagram napětí-přetvoření s definovanou mezí kluzu pro nepředpjaté vyztužení, viz AASHTO LRFD (2024) článek 5.4.3. Definice tohoto diagramu vyžaduje znalost pouze základních vlastností vyztužení – pevnosti a modulu pružnosti.
Diagram napětí-přetvoření vyztužení může být také definován uživatelem, v takovém případě však nelze předpokládat efekt tahového zpevnění (nelze vypočítat šířku trhlin).
\[ \textsf{\textit{\footnotesize{Fig. 60 \qquad Stress-strain diagram of reinforcement}}}\]
kde:
Φs je součinitel únosnosti vyztužení. Výchozí hodnota je nastavena podle AASHTO LRFD (2024) článku 5.5.4.2.
fy je mez kluzu vyztužení
Es modul pružnosti vyztužení
Jako mezní přetvoření, při kterém je výpočet zastaven, je zvoleno 10 %. Toto je považováno za bezpečné na základě ASTM A955/A955M-20c článku 7.
Tahové zpevnění (obr. 61) je automaticky zohledněno úpravou vstupního diagramu napětí-přetvoření holé výztuže tak, aby byla zachycena průměrná tuhost prutů zabetonovaných v betonu (εm).
\[ \textsf{\textit{\footnotesize{Fig. 61\qquad Scheme of tension stiffening.}}}\]
6.2 Odolnost a součinitele zatížení
Compatible Stress Field Method je v souladu s moderními návrhových normami. Protože výpočetní modely využívají pouze standardní vlastnosti materiálů, lze bez jakékoli úpravy použít formát dílčích součinitelů bezpečnosti předepsaný v návrhových normách. Vstupní zatížení jsou tak násobena součiniteli a charakteristické vlastnosti materiálů jsou redukovány příslušnými součiniteli únosnosti, přesně jako v konvenční analýze betonu.
Hodnoty součinitelů únosnosti jsou předepsány v AASHTO LRFD (2024), článek 5.5.4. Výchozí hodnoty pro beton a vyztužení jsou zvoleny konzervativně, na základě předpokladu, že typickým řešeným příkladem je D-oblast – typický případ pro metodu vzpěra-táhlo. Je však možné modelovat jakýkoli typ prvku. Pokud je tedy posuzován prvek ovládaný tlakem nebo tahem, má uživatel možnost změnit hodnotu součinitele snížení únosnosti v Předvolbách.

\[ \textsf{\textit{\footnotesize{Fig. 62\qquad The setting of resistance factors in IDEA StatiCa Detail.}}}\]
Součinitele zatížení a kombinace zatížení se stanoví podle AASHTO LRFD Bridge Design Specifications (2024), článek 3.4.1 a tabulky 3.4.1-1 až 3.4.1-6. AASHTO LRFD explicitně specifikuje kombinace zatížení pro mezní stav únosnosti (Strength I až Strength V) a také kombinace zatížení na úrovni provozního stavu (Service I až Service IV), včetně příslušných součinitelů zatížení pro každý případ.
Pro každou šablonu program obsahuje předdefinované základní kombinace, které je třeba doplnit v závislosti na posuzovaném prvku.

\[ \textsf{\textit{\footnotesize{Fig. 63\qquad The setting of load factors in Idea StatiCa Detail.}}}\]
6.3 Mezní stav únosnosti
Různá posouzení požadovaná normou AASHTO jsou hodnocena na základě přímých výsledků poskytnutých modelem. Posouzení jsou prováděna pro pevnost betonu, pevnost vyztužení a kotvení (smykové napětí v soudržnosti).
Pevnost betonu v tlaku je hodnocena jako poměr mezi maximálním hlavním tlakovým napětím fc (také σ2 v pomocných výsledcích) získaným z analýzy metodou konečných prvků a limitní hodnotou f'c,lim.
Pevnost vyztužení je hodnocena jak v tahu, tak v tlaku jako poměr mezi napětím ve výztuži v trhlinách fs a stanovenou limitní hodnotou fy,lim.
Smykové napětí v soudržnosti je hodnoceno samostatně jako poměr mezi napětím v soudržnosti τb vypočteným analýzou metodou konečných prvků a pevností v soudržnosti fbu.
Protože pevnost v soudržnosti není v normě AASHTO explicitně definována, musí být její hodnota stanovena pomocí rovnic, které definují kotevní délku. Pevnost v soudržnosti je ve skutečnosti primárním vstupem pro stanovení kotevní délky; viz například článek AASHTO LRFD (2024) Article C5.10.8.2 nebo NCHRP Report 733, Attachment E strana E-9.
Výpočet popsaný v AASHTO LRFD (2024) Article 5.10.8.2.1 a 5.10.8.2.2, který vyžaduje znalost maximální osové vzdálenosti příčné výztuže v rámci ld, počtu prutů nebo drátů kotvených podél roviny štěpení, celkové průřezové plochy veškeré příčné výztuže a dalších geometrických veličin, které nelze spolehlivě určit v modelu aplikace Detail pro obecný vstup, byl přijat přístup z AASHTO LRFD (2014) Article 5.11.2.1.1 následujícím způsobem:
Předpokládejme, že pokud zakotvíme prut výztuže do betonového bloku na kotevní délku ld nebo větší, vytažení výztuže povede k přetržení výztuže, nikoli k vytažení z betonu. To lze zapsat následujícím vzorcem.
\[\pi\cdot d_{b} \cdot l_{d} \cdot f_{bu}=f_{y}\cdot A_{b}\]
kde:
- db je průměr prutu výztuže
- ld je kotevní délka
- fbu je pevnost v soudržnosti
- fy je mez kluzu výztuže
- Ab je průřezová plocha prutu výztuže
Z výše uvedeného lze snadno odvodit vzorec pro výpočet pevnosti v soudržnosti.
\[f_{bu}=\frac{f_{y}\cdot A_{b}}{\pi\cdot d_{b} \cdot l_{d} }\]
Základní kotevní délka v tahu ldb je stanovena v AASHTO LRFD (2014) Article 5.11.2.1.1 takto:
Pro pruty č. 11 a menší: \(l_{bd}=\max\left(1.25\cdot\dfrac{A_{b}\cdot f_{y}}{\sqrt{f'_{c}}},\ 0.4\cdot d_{b}\cdot f_{y}\right)\)
Pro pruty č. 14: \(l_{bd}=\dfrac{2.70\cdot f_{y}}{\sqrt{f'_{c}}}\)
Pro pruty č. 18: \(l_{bd}=\dfrac{3.5\cdot f_{y}}{\sqrt{f'_{c}}}\)
kde:
- Ab je průřezová plocha prutu výztuže (in2)
- fy je stanovená mez kluzu výztuže (ksi)
- f'c stanovená pevnost betonu v tlaku ve stáří 28 dní, není-li stanoveno jiné stáří (ksi)
- db je průměr prutu výztuže (in)
Poté, vynásobením základní kotevní délky ldb součiniteli popsanými v AASHTO LRFD (2014) Article 5.11.2.1.2 a 5.11.2.1.3, je stanovena kotevní délka ld jako vstupní hodnota.
Modifikační součinitele snižující kotevní délku z 5.11.2.1.3 jsou v aplikaci vždy rovny 1,0. Modifikační součinitel pro horní vodorovnou nebo téměř vodorovnou výztuž je roven 1,4 pro podmínky soudržnosti „špatné", podle následujícího obrázku:

\[ \textsf{\textit{\footnotesize{Fig. 64\qquad Description of bond conditions; a) b) 'good' bond conditions for all bars; c) d) unhatched zone – 'good' bond conditions, hatched zone – 'poor' bond conditions}}}\]
Směr betonování lze nastavit v aplikaci.
\[ \textsf{\textit{\footnotesize{Fig. 65\qquad Direction of concreting}}}\]
Všechny ostatní součinitele stanovené v 5.11.2.1.2 jsou rovny 1,0, protože je podporován pouze beton s normální objemovou hmotností a pouze nepovlakovaná výztuž.
Smykové napětí v soudržnosti a pevnost v soudržnosti prutů v tlaku jsou vypočítány analogicky k prutům v tahu, ale jsou použity rovnice z AASHTO LRFD (2014) Article 5.11.2.2.
Existuje také možnost modelovat hladké pruty výztuže. Více informací lze nalézt zde: Hladké pruty výztuže v Detail
Celková síla Ftot a limitní síla Flim
Celková síla Ftot je výsledkem analýzy metodou konečných prvků a lze ji definovat dvěma způsoby.
\[F_{tot}=A_{b} \cdot f_{s}\]
kde Ab je průřezová plocha prutu výztuže a fs je napětí v prutu.
Nebo jako součet kotevní síly Fa a síly v soudržnosti Fbond.
\[F_{tot}=F_{a}+F_{bond}\]
kde Fa je skutečná síla v kotevní pružině a Fbond je síla v soudržnosti, kterou lze získat integrací napětí v soudržnosti τb podél délky prutu výztuže l.
\[F_{bond}=C_{s} \cdot \int_{0}^{l}\tau_{b}\left( x \right)dx\]
Cs je obvod prutu výztuže.
Limitní síla Flim je maximální síla v prvku prutu výztuže s ohledem na pevnost prutu výztuže a také podmínky kotvení (soudržnost mezi betonem a výztuží a kotevní háky, smyčky atd.).
\[F_{lim}=min\left( F_{lim,bond}+F_{au},F_{u} \right)\]
\[F_{u}=f_{y,lim}\cdot A_{b}\]
\[F_{au}=\beta\cdot f_{y,lim}\cdot A_{b}\]
\[F_{lim,bond}=C_{s}\cdot l \cdot f_{bu}\]
kde Cs je obvod prutu výztuže a l je délka od začátku prutu výztuže k posuzovanému místu.
\[ \textsf{\textit{\footnotesize{Fig. 66\qquad Definition of the limit force Flim}}}\]
\[F_{lim,2}=F_{lim,1}+F_{lim,add}\]
kde Flim,add je přídavná síla vypočtená z velikosti úhlu mezi sousedními prvky. Flim,2 musí být vždy menší než Fu.
Dostupné typy kotvení v CSFM zahrnují přímý prut (tj. bez redukce kotevního konce), hák 90°, hák 180°, dokonalou soudržnost a průběžný prut. Všechny tyto typy spolu s příslušnými kotevními součiniteli β jsou zobrazeny na obr. 67 pro podélnou výztuž. Hodnoty přijatých kotevních součinitelů jsou odvozeny z porovnání rovnice z oddílu AASHTO LRFD (2014) 5.11.2.1 a rovnic převzatých z oddílu AASHTO LRFD (2014) 5.11.2.4.1. Je třeba poznamenat, že navzdory různým dostupným možnostem CSFM rozlišuje tři typy kotevních konců: (i) bez redukce kotevní délky, (ii) redukce o 30 % kotevní délky v případě normalizovaného kotvení a (iii) dokonalá soudržnost.
\[ \textsf{\textit{\footnotesize{Fig. 67\qquad Available anchorage types and respective anchorage coefficients for longitudinal reinforcing bars in CSFM:}}}\]
\[ \textsf{\textit{\footnotesize{(a) straight bar; (b) 90-degree hook; (c) 180-degree hook; (d) perfect bond; (e) continuous bar}}}\]
Kotevní součinitel pro třmínky (dostupný pro prvek nosníku) je vždy β = 1,0.
Aby bylo dosaženo souladu s normou AASHTO, měla by být v výpočtu použita kotevní pružina. Kotevní pružina je modifikována součinitelem β, takže uživatel musí při definování podmínek začátku a konce výztuže použít jeden z dostupných typů kotvení.
6.4 Odolnost zón uložení a kotvení – Částečně zatížené plochy
Při navrhování betonových konstrukcí se setkáváme se dvěma velkými skupinami částečně zatížených ploch (PLA) – první z nich tvoří ložiska, zatímco druhou tvoří kotevní zóny.
Podle aktuálně platných norem pro navrhování železobetonových konstrukcí je třeba u ložisek uvažovat místní drcení betonu a příčné tahové síly. Pro rovnoměrně rozložené zatížení na ploše A1 lze únosnost betonu v tlaku zvýšit až dvojnásobně v závislosti na návrhové roznosné ploše A2. Viz AASHTO LRFD (2024) článek 5.6.5.

\[ \textsf{\textit{\footnotesize{Fig. 68\qquad Partially loaded areas for bearings according to AASHTO LRFD (2024) Article 5.6.5}}}\]
Pro kotevní zóny s dodatečným předpětím je třeba postupovat podle AASHTO LRFD (2024) článku 5.8.4.4.
Částečně zatížená plocha musí být dostatečně vyztužena příčnou výztuží navrženou k přenosu štěpných sil vznikajících v dané oblasti. Bez požadované příčné výztuže nelze uvažovat se zvýšením únosnosti betonu v tlaku.
Částečně zatížené plochy v CSFM
\[ \textsf{\textit{\footnotesize{Fig. 69\qquad Fictitious struts with concrete finite element mesh.}}}\]
Pomocí CSFM je možné navrhovat a posuzovat železobetonové konstrukce s uvažováním vlivu zvýšené tlakové únosnosti betonu v částečně zatížených plochách. Protože CSFM je stěnový (2D) model a částečně zatížené plochy jsou prostorovou (3D) úlohou, bylo nutné nalézt řešení kombinující tyto dva různé typy úloh (Obr. 69). Je-li aktivována funkce „částečně zatížené plochy", vytvoří se přípustná geometrie kužele podle ACI (Obr. 68). Veškeré geometrické kolize jsou plně řešeny ve 3D pro zadanou geometrii betonového prvku a rozměry každé PLA. Následně je vytvořen výpočetní model částečně zatížené plochy.
\[ \textsf{\textit{\footnotesize{Fig. 70\qquad Allowable cone geometries.}}}\]
Modifikace materiálového modelu se ukázala jako nevhodný přístup, a to především proto, že mapování vlastností na síť konečných prvků je problematické. Bylo zjištěno, že vhodnějším řešením je přístup nezávislý na síti konečných prvků. Pro známou geometrii tlakového kužele jsou vytvořeny absolutně soudržné fiktivní tlakové vzpěry (Obr. 70 a Obr. 71). Tyto vzpěry mají stejné materiálové vlastnosti jako beton použitý v modelu, včetně diagramu napětí-přetvoření. Tvar kužele určuje směr vzpěr, které postupně rozkládají zatížení z PLA na návrhovou roznosnou plochu. Plošná hustota fiktivních vzpěr je v každé části kužele proměnná a přidává fiktivní betonovou plochu ve směru zatížení. Na úrovni zatížené plochy (A1) je přidána fiktivní plocha betonu podle poměru \(\sqrt{A_{1} \cdot A_{2}} - A_{real}\) (kde Areal je plocha podpory uvažovaná ve 2D výpočetním modelu) a tato plocha lineárně klesá na nulu směrem k návrhové roznosné ploše (A2). Toto řešení zajišťuje, že tlakové napětí v betonu je konstantní v celém objemu kužele.
\[\rho \left( {\beta ,z} \right) = \left( {\sqrt {\frac{A_{2}}{A_{1}}} - \frac{A_{real}}{A_{1}}} \right)\,\cdot\,\left( {1 - \frac{z}{h}} \right)\,\cdot\,\frac{1}{{\cos \beta }}\]
\[ \textsf{\textit{\footnotesize{Fig. 71\qquad Fictitious struts in the computational model}}}\]
Únosnost částečně zatížené plochy je zvýšena podle poměru návrhové roznosné plochy a zatížené plochy stanoveného v AASHTO LRFD (2024) článku 5.6.5. Je třeba mít na paměti, že se jedná o návrhový model, který nemůže přesně popsat stav napětí v částečně zatížené ploše, jehož skutečný průběh je mnohem složitější. Toto řešení však umožňuje správné rozdělení zatížení do celého modelu při respektování zvýšené únosnosti částečně zatížené plochy. Navíc správně zavádí příčná napětí v této oblasti pro správný návrh výztuže na štěpné síly.
Přípustné napětí v ložisku 0,85fc' je uvedeno v AASHTO LRFD (2024) článku 5.8.4.4. Hustota je omezena tak, aby nebyla překročena maximální dvojnásobná únosnost uvedená ve vzorci 5.6.5-3.
Pro kotevní zóny je PLA v aplikaci použita stejným způsobem jako pro ložiska. Proto je nutné ručně ověřit tlakové napětí v lokálních a globálních zónách definovaných v článcích 5.8.4.4 a 5.8.4.5. PLA je tedy použita pouze k tomu, aby nedošlo k překročení kritéria přetvoření v lokální zóně a tím k předčasnému zastavení výpočtu. Na druhou stranu výztuž odolávající rozrážecím, odlupovacím rovinným a okrajovým tahovým napětím v obecných zónách (definovaných v článku 5.8.4.5) lze přímo a výhodně ověřit v aplikaci.
6.5 Mezní stav použitelnosti
Posouzení použitelnosti se provádí pro omezení napětí, šířku trhlin a omezení průhybů. Napětí jsou posuzována v betonových a výztužných prvcích podle AASHTO LRFD podobným způsobem, jako je stanoveno pro mezní stav únosnosti.
Omezení napětí
Napětí v betonu v tlaku je vyhodnocováno pouze pro předpjaté prvky (pokud je v modelu přítomen zatěžovací případ Předpětí) jako poměr mezi maximálním hlavním tlakovým napětím fc = σc2 získaným z analýzy MKP pro použitelnost a limitními hodnotami, které jsou stanoveny na základě AASHTO LRFD Tabulky 5.9.2.3.2a-1.

\[ \textsf{\textit{\footnotesize{Fig. 72\qquad Concrete compressive stress limits at service loads}}}\]
V aplikaci je Předpětí plus stálé zatížení považováno za trvalé zatížení a Předpětí, stálé a proměnné zatížení za celkové zatížení.

\[ \textsf{\textit{\footnotesize{Fig. 73\qquad Serviceability combination types}}}\]
Kromě toho je vždy možné provést analýzu jak pro krátkodobé, tak pro dlouhodobé účinky, a to pomocí materiálových modelů, které buď zohledňují, nebo nezohledňují součinitel dotvarování – viz část „Materiálové modely (AASHTO)".

\[ \textsf{\textit{\footnotesize{Fig. 74\qquad Serviceability material models}}}\]
Průhyb
Okamžité průhyby a celkové průhyby jsou vyhodnocovány pro každou kombinaci, ve které je vyhodnocení průhybu povoleno.
- Pro okamžité průhyby se používá modul pružnosti Ec podle AASHTO LRFD (2024) článku 5.4.2.4.
- Pro celkové průhyby se používá efektivní modul pružnosti Ec,eff podle AASHTO LRFD (2024) článku C5.12.5.3.6.
Viz kapitola 'Materiálové modely (AASHTO) – Beton – Použitelnost' v tomto dokumentu.
Samotná kontrola průhybu je povolena v horním panelu nástrojů. Uživatel nastavuje limitní hodnoty průhybu podle AASHTO LRFD (2024) článku 2.5.2.6.2 v závislosti na typu analyzovaného prvku.

\[ \textsf{\textit{\footnotesize{Fig. 75\qquad Maximum allowable deflection value}}}\]
Průhyby na oříznutých koncích nelze posuzovat.
Šířka trhlin
Šířky trhlin a jejich orientace jsou počítány pouze pro dlouhodobé účinky (s použitím Ec,eff podle AASHTO LRFD (2024) článku C5.12.5.3.6) pro kombinace, ve kterých je vyhodnocení šířky trhlin povoleno. Ověření na základě uživatelem zadaných limitních hodnot je následující:
\[\frac{w}{w_{lim}}\]
kde:
w šířka trhliny vypočtená analýzou MKP,
wlim limitní hodnota šířky trhliny definovaná uživatelem.
Limitní hodnota wlim se stanoví na základě typu prvku a třídy prostředí v souladu s AASHTO LRFD (2024) článkem 5.6.7 a jeho komentářem.
Existují dva způsoby výpočtu šířek trhlin (stabilizované a nestabilizované trhliny). V obecném případě (stabilizované trhliny) se šířka trhliny vypočítá integrací přetvoření na 1D prvcích výztužných prutů. Směr trhliny se pak vypočítá ze tří nejbližších (od středu daného 1D konečného prvku výztuže) integračních bodů 2D betonových prvků. Ačkoli tento přístup k výpočtu směrů trhlin neodpovídá skutečné poloze trhlin, poskytuje reprezentativní hodnoty, které vedou k výsledkům šířek trhlin srovnatelným s hodnotami šířek trhlin požadovanými normou v místě výztužného prutu.
7 Structural verifications according to Australian standard AS 3600 (2018)
Assessment of the structure using the CSFM is performed by two different analyses: one for serviceability, and one for strength load combinations. The serviceability analysis assumes that the behavior under factored loads is satisfactory, and the yield conditions of the material will not be reached at serviceability load levels. This approach enables the use of simplified constitutive models (with a linear branch of concrete stress-strain diagram) for serviceability analysis to enhance numerical stability and calculation speed.
The CSFM is a structural analysis method that satisfies the general rules in Chapters 6.1.1 and 6.1.2 and is defined as (f) non-linear stress analysis in Chapter 6.1.3 - further in Chapter 6.6.
The analysis by CSFM takes into account all relevant non-linear and inelastic effects (except shrinkage) defined in 6.6.3.
In order to satisfy the requirements in Sections 6.6.4 and 6.6.5 - more can be found in AS3600:2018 Sup 1:2022 Section C6.6 - verification and validations of the method were done at various universities. Individual articles summarizing the results of verification and validation can be found at the following link.
Since IDEA StatiCa Detail is a practical design program, factored characteristic compressive cylinder strength at 28 days f'c is used for calculations, as is described in the next chapter.
7.1 Modely materiálů (AS 3600)
Beton - Pevnost
Model betonu implementovaný pro výpočty pevnosti v CSFM je založen na parabolicko-plastické křivce napětí-přetvoření. Pevnost v tahu je zanedbána, stejně jako v klasickém návrhu železobetonu.
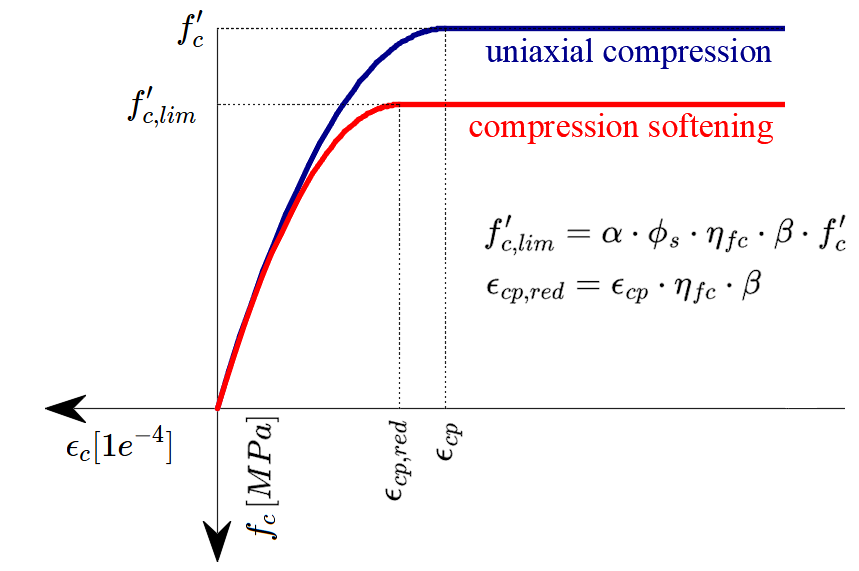
\[ \textsf{\textit{\footnotesize{Fig. 76\qquad The stress-strain diagram of concrete for Strength analysis}}}\]
Implementace CSFM v IDEA StatiCa Detail neuvažuje explicitní kritérium porušení z hlediska přetvoření pro beton v tlaku (tj. po dosažení maximálního napětí uvažuje plastickou větev s εc0 s maximální hodnotou 5 %, zatímco AS 3600 Cl. 8.3.1 předpokládá mezní přetvoření menší než 0,3 %). Toto zjednodušení neumožňuje ověřit deformační kapacitu konstrukcí porušovaných tlakem. Pevnost je však správně předpovězena, pokud je kromě součinitele trhlinami oslabeného betonu (kc2 definovaného na (Obr. 77)) zohledněn nárůst křehkosti betonu s rostoucí pevností pomocí redukčního součinitele \(\eta_{fc}\) definovaného v fib Model Code 2010 takto:
\[f'_{c,lim}=\alpha_{2}\cdot\phi_{s}\cdot \beta \cdot \eta_{fc}\cdot f'_{c}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f'_{c}}}}} \right)^{\frac{1}{3}}} \le 1\]
kde:
α2 je redukční součinitel tlakové pevnosti betonu definovaný v AS 3600 Cl. 8.3.1
Při použití parabolicko-obdélníkového diagramu napětí-přetvoření je nutné snížit maximální tlakové napětí tímto součinitelem. Tím se zprůměruje rozložení napětí v tlačené zóně tak, aby výsledná tlaková pevnost byla menší nebo rovna tlakové pevnosti vypočtené pomocí diagramu napětí-přetvoření s klesající plastickou větví. Analogický přístup je definován pro obdélníkový blok napětí v kapitole 8.1.3.
Φs je redukční součinitel napětí pro beton. Výchozí hodnota je nastavena podle AS 3600 Tabulka 2.2.3.
β je redukční součinitel zohledňující přítomnost příčných trhlin (v tomto textu také označovaný jako kc2)
f'c je válcová pevnost betonu (v MPa pro definici \( \eta_{fc} \)).
\[ \textsf{\textit{\footnotesize{Fig. 77\qquad The compression softening law.}}}\]
β je redukční součinitel vycházející ze stejných principů jako součinitel efektivní tlakové pevnosti definovaný v kapitole 2.2.3. Literatura, na základě které je tento součinitel stanoven, je uvedena (včetně kontextu normy AS3600) v AS3600:2018 Sup 1:2022 CL. C2.2.3.
Beton – Použitelnost
Analýza použitelnosti obsahuje určitá zjednodušení konstitutivních modelů používaných pro analýzu pevnosti. Plastická větev křivky napětí-přetvoření betonu v tlaku je zanedbána, zatímco elastická větev je lineární a neomezená. Zákon tlakového změkčení není uvažován. Tato zjednodušení zvyšují numerickou stabilitu a rychlost výpočtu a nesnižují obecnost řešení, pokud jsou výsledná omezení napětí materiálu při použitelnosti zřetelně pod mezí kluzu (jak vyžaduje AS3600). Zjednodušené modely používané pro použitelnost jsou proto platné pouze tehdy, jsou-li splněny všechny požadavky na ověření.
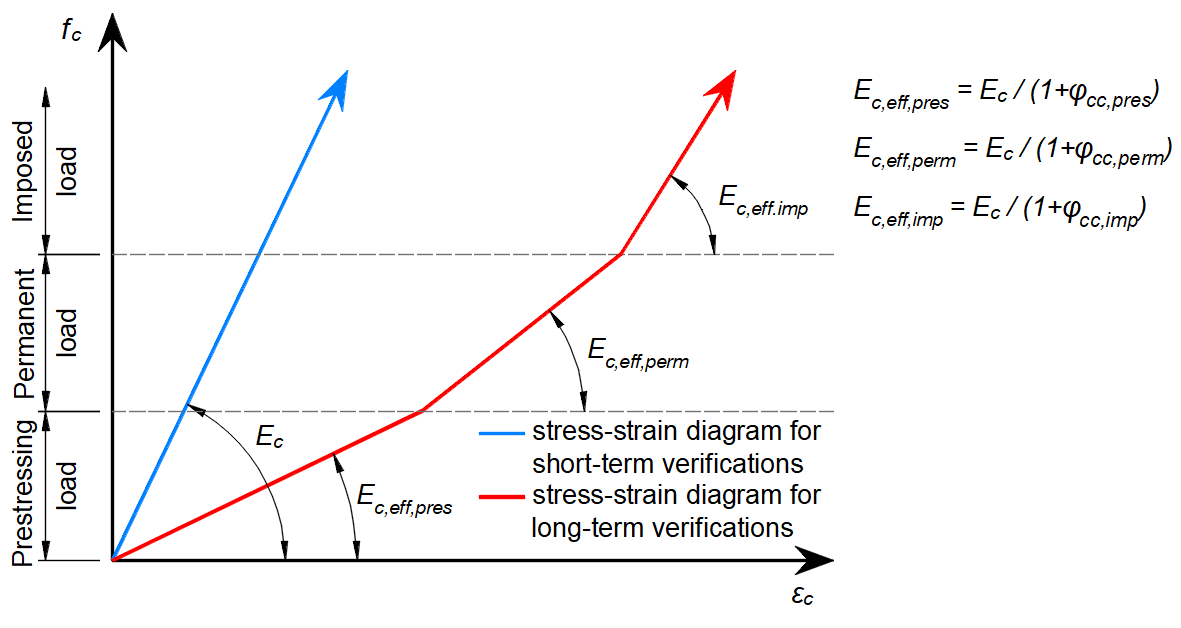
\[ \textsf{\textit{\footnotesize{Fig. 78\qquad Concrete stress-strain diagrams implemented for serviceability analysis: short- and long-term verifications.}}}\]
Dlouhodobé účinky
V analýze použitelnosti jsou dlouhodobé účinky betonu zohledněny pomocí návrhového součinitele dotvarování podle AS 3600 CL 3.1.8 (φcc, jehož výchozí hodnota je 2,5), který upravuje sečnový modul pružnosti betonu (Ec) takto:
\[E_{c,eff} = \frac{E_{c}}{1+\varphi_{cc}}\]
Přírůstky zatížení jsou postupně počítány v pořadí: Předpětí – Stálé – Proměnné, přičemž pro každý přírůstek je použit příslušný efektivní modul pružnosti, jak je znázorněno na Obr. 78. Součinitele dotvarování jsou definovány uživatelem ve vlastnostech materiálu a musí být vypočteny podle AS 3600 CL 3.1.8.3.
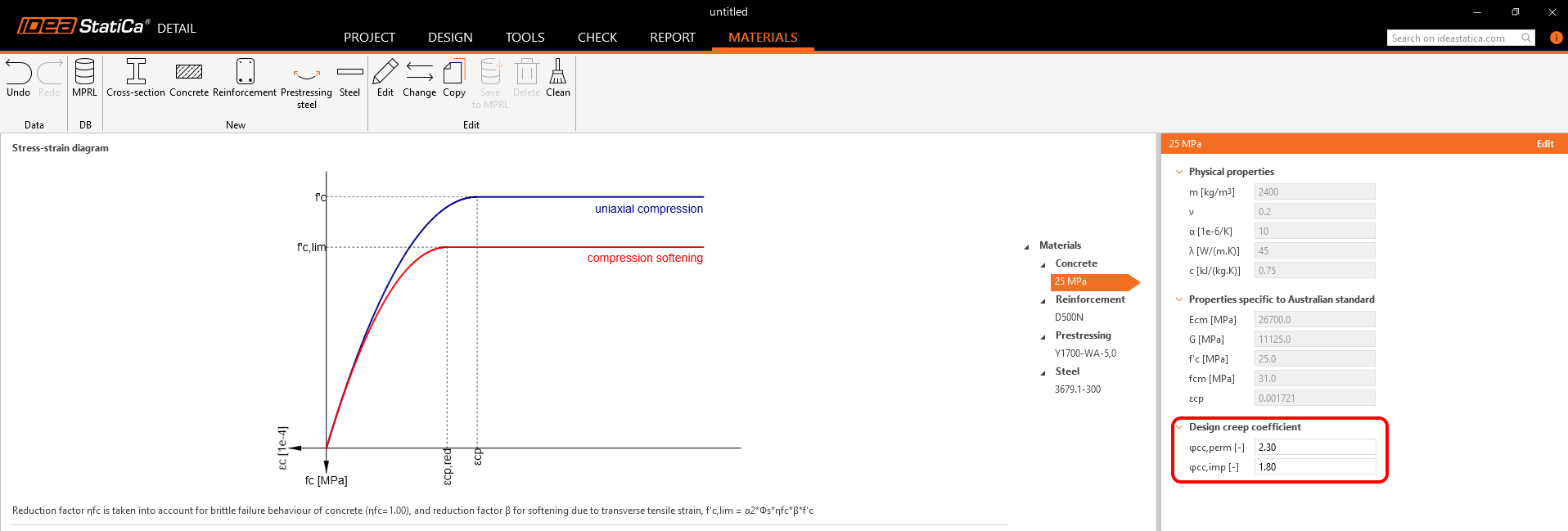
\[ \textsf{\textit{\footnotesize{Fig. 79\qquad Definition of the design creep factor}}}\]
Krátkodobé účinky
Pro provedení krátkodobých ověření je proveden další výpočet, ve kterém jsou všechna zatížení počítána bez časově závislého součinitele pro trvalá zatížení. Oba výpočty pro dlouhodobá a krátkodobá ověření jsou znázorněny na Obr. 78.
Vyztužení
Uvažuje se dokonale elasto-plastický diagram napětí-přetvoření s definovanou mezí kluzu pro nevypínané vyztužení, viz AS 3600 Oddíl 3.2. Definice tohoto diagramu vyžaduje pouze znalost základních vlastností vyztužení – pevnosti a modulu pružnosti.
Diagram napětí-přetvoření vyztužení může být také definován uživatelem, v takovém případě však nelze uvažovat tahové zpevnění (nelze vypočítat šířku trhlin).
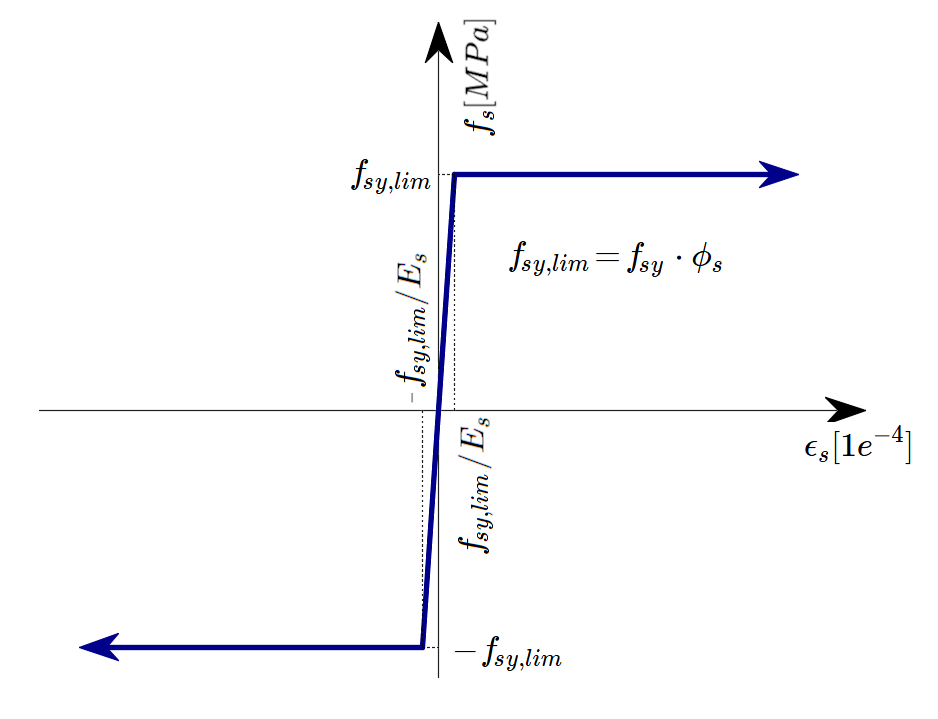
\[ \textsf{\textit{\footnotesize{Fig. 80 \qquad Stress-strain diagram of reinforcement}}}\]
kde:
Φs je součinitel snížení únosnosti pro vyztužení. Výchozí hodnota je nastavena podle AS 3600 Tabulka 2.2.3.
fy je mez kluzu vyztužení
Es modul pružnosti vyztužení
Tahové zpevnění (Obr. 81) je automaticky zohledněno úpravou vstupního diagramu napětí-přetvoření holé výztuže tak, aby byla zachycena průměrná tuhost prutů zabetonovaných v betonu (εm).
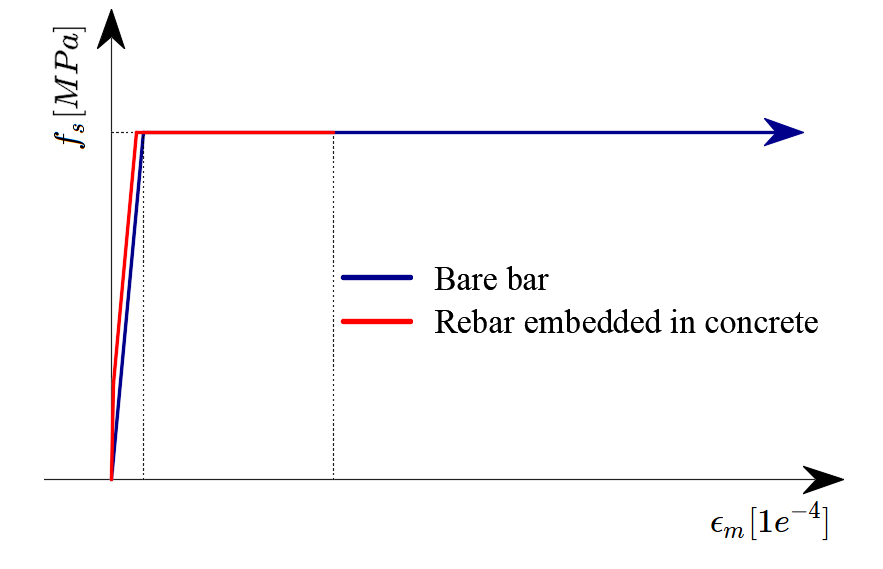
\[ \textsf{\textit{\footnotesize{Fig. 81\qquad Scheme of tension stiffening.}}}\]
7.2 Redukce napětí a součinitele zatížení
Compatible Stress Field Method je v souladu s moderními návrhových normami. Protože výpočetní modely využívají pouze standardní vlastnosti materiálů, lze bez jakékoli úpravy použít formát dílčích součinitelů spolehlivosti předepsaný v návrhových normách. Vstupní zatížení jsou tak násobena součiniteli a charakteristické vlastnosti materiálů jsou redukovány příslušnými redukčními součiniteli napětí, přesně jako v konvenční analýze betonu.
Hodnoty redukčních součinitelů napětí jsou předepsány v AUS 3600 Cl. 2.2.3. Výchozí hodnoty pro beton a vyztužení jsou nastaveny podle Table 2.2.3
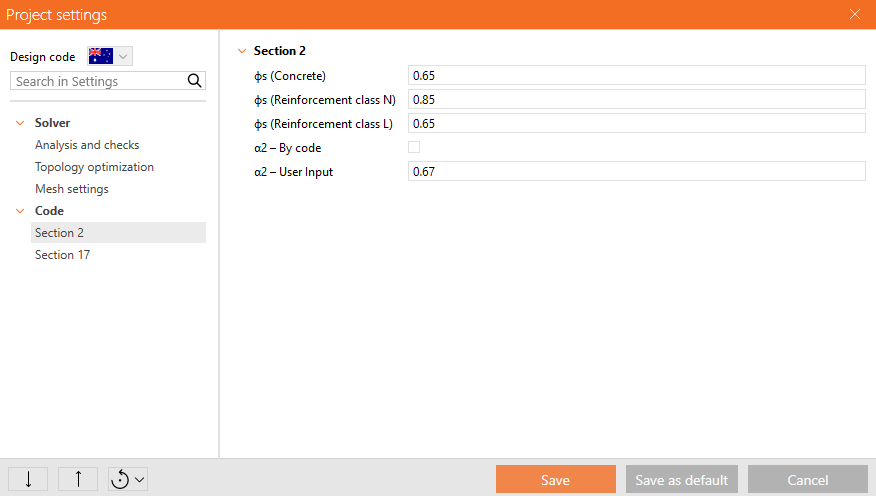
\[ \textsf{\textit{\footnotesize{Fig. 82\qquad The setting of stress reduction factors in IDEA StatiCa Detail.}}}\]
Součinitele zatížení pro kombinace únosnosti musí být definovány podle AS 3600 Cl. 4.2.2. Součinitele zatížení pro kombinace použitelnosti musí být stanoveny podle Table 4.1. Pro všechny šablony jsou součinitele zatížení již předdefinovány.
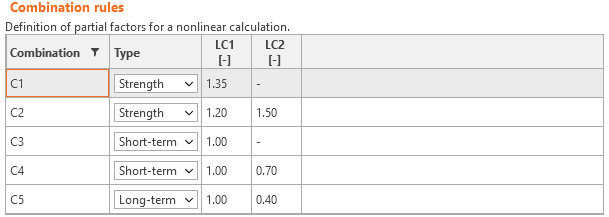
\[ \textsf{\textit{\footnotesize{Fig. 83\qquad The setting of load factors in Idea StatiCa Detail.}}}\]
7.3 Ověření únosnosti a kotvení
Různá ověření požadovaná normou AS 3600 jsou posuzována na základě přímých výsledků poskytnutých modelem. Ověření se provádějí pro pevnost betonu, pevnost vyztužení a kotvení (soudržnostní smykové napětí).
Pevnost betonu v tlaku je hodnocena jako poměr mezi maximálním hlavním tlakovým napětím fc (také σ2 v pomocných výsledcích) získaným z analýzy metodou konečných prvků a limitní hodnotou f'c,lim.
Pevnost vyztužení je hodnocena jak v tahu, tak v tlaku jako poměr mezi napětím ve výztuži v trhlinách fs a stanovenou limitní hodnotou fsy,lim.
Soudržnostní smykové napětí je hodnoceno samostatně jako poměr mezi napětím soudržnosti τb vypočteným analýzou metodou konečných prvků a návrhovou mezní hodnotou napětí soudržnosti fbu.
Pro stanovení návrhové mezní hodnoty napětí soudržnosti fbu je v aplikaci uvažován vzorec C13.1.2.2 definovaný v AS3600:2018 Sup 1:2022.
\[f_{bu}=\frac{k_{2}}{k_{1} \cdot k_{3}} \cdot (0.5 \cdot \sqrt{f'_{c}})\]
Kde f'c ≤ 65 MPa (ve vzorci je v MPa) a součinitele k jsou stanoveny z AS 3600 čl. 13.1.2.2 takto:
k3 = 0.7 (konzervativní hodnota pro veškeré vyztužení)
k2 = (132 - db) / 100 (db je průměr prutu v milimetrech)
= 1.3 pro vodorovný prut s více než 300 mm betonu zabetonovaného pod prutem, jinak 1.0
k1 je automaticky odvozen z polohy výztuže v modelu a ze směru betonování, který lze v aplikaci nastavit pro každou položku projektu takto.
\[ \textsf{\textit{\footnotesize{Fig. 84\qquad Direction of concreting}}}\]
Základní kotevní délka Lsy,tb je vypočtena podle vzorce 13.1.2.2 v AS 3600 takto:
\[L_{sy,tb}=\frac{0.5\cdot k_{1}\cdot k_{3}\cdot f_{sy}\cdot d_{b}}{k_{2}\cdot \sqrt{f'_{c}}}\ge 29 \cdot k_{1}\cdot d_{b}\]
Jak je patrné ze vzorce, základní kotevní délka Lsy,tb je omezena zdola, a proto musí být návrhová mezní hodnota napětí soudržnosti fbu v aplikaci omezena stejným způsobem, takže platí:
\[f_{bu}\le \frac{f_{sy}}{116 \cdot k_{1}} \]
Kde fsy je v MPa.
Odvození omezení fbu je následující:
\[f_{bu}= \frac{f_{sy}\cdot A_{s}}{ \pi \cdot d_{b} \cdot L_{sy,tb}}=\frac{f_{sy}\cdot \pi \cdot d_{b}^{2}}{4 \cdot \pi \cdot d_{b} \cdot 29 \cdot k{1} \cdot d_{b}} =\frac{f_{sy}}{116 \cdot k_{1}} \]
Existuje také možnost modelovat hladké pruty. Více informací naleznete zde: Hladké pruty v aplikaci Detail
Celková síla Ftot a limitní síla Flim
Celková síla Ftot je výsledkem analýzy metodou konečných prvků a lze ji definovat dvěma způsoby.
\[F_{tot}=A_{s} \cdot f_{s}\]
kde As je průřezová plocha prutu výztuže a fs je napětí v prutu.
Nebo jako součet kotevní síly Fa a síly soudržnosti Fbond.
\[F_{tot}=F_{a}+F_{bond}\]
kde Fa je skutečná síla v kotevní pružině a Fbond je síla soudržnosti, kterou lze získat integrací napětí soudržnosti τb podél délky prutu výztuže l.
\[F_{bond}=C_{s} \cdot \int_{0}^{l}\tau_{b}\left( x \right)dx\]
Cs je obvod prutu výztuže.
Limitní síla Flim je maximální síla v prvku prutu s ohledem na pevnost prutu a také na podmínky kotvení (soudržnost mezi betonem a výztuží a kotevní háky, smyčky atd.).
\[F_{lim}=min\left( F_{lim,bond}+F_{au},F_{u} \right)\]
\[F_{u}=f_{y,lim}\cdot A_{s}\]
\[F_{au}=\beta\cdot f_{y,lim}\cdot A_{s}\]
\[F_{lim,bond}=C_{s}\cdot l \cdot f_{bu}\]
kde Cs je obvod prutu výztuže a l je délka od začátku prutu k posuzovanému místu.
\[ \textsf{\textit{\footnotesize{Fig. 85\qquad Definition of the limit force Flim}}}\]
\[F_{lim,2}=F_{lim,1}+F_{lim,add}\]
kde Flim,add je přídavná síla vypočtená z velikosti úhlu mezi sousedními prvky. Flim,2 musí být vždy menší než Fu.
Dostupné typy kotvení v CSFM zahrnují přímý prut (tj. bez redukce kotevního konce), standardní ohyb, standardní hák, dokonalou soudržnost a průběžný prut. Všechny tyto typy spolu s příslušnými kotevními součiniteli β jsou zobrazeny na obr. 86 pro podélnou výztuž. Hodnoty použitých kotevních součinitelů jsou odvozeny z AS 3600 čl. 13.1.2. Je třeba poznamenat, že CSFM rozlišuje tři typy kotevních konců: (i) bez redukce kotevní délky, (ii) redukce o 50 % kotevní délky v případě normalizovaného kotvení a (iii) dokonalá soudržnost.

\[ \textsf{\textit{\footnotesize{Fig. 86\qquad Available anchorage types and respective anchorage coefficients for longitudinal reinforcing bars in CSFM:}}}\]
\[ \textsf{\textit{\footnotesize{(a) straight bar; (b) Standard cog; (c) Standard hook; (d) perfect bond; (e) continuous bar}}}\]
Kotevní součinitel pro třmínky je vždy β = 1.0.
Aby byl splněn požadavek normy AS 3600, musí být ve výpočtu použita kotevní pružina; kotevní pružina je upravena součinitelem β, takže uživatel musí při definování podmínek začátku a konce výztuže použít jeden z dostupných typů kotvení.
7.4 Posouzení mezního stavu použitelnosti
Posouzení použitelnosti se provádí pro šířky trhlin a omezení průhybů.
Průhyb
Na základě zvoleného typu kombinace (dlouhodobá nebo krátkodobá) se vyhodnocuje buď dlouhodobý, nebo krátkodobý průhyb. Maximální přípustnou hodnotu průhybu stanoví uživatel a je třeba ji zohlednit v souladu s AS 3600 Cl. 2.3.2.

\[ \textsf{\textit{\footnotesize{Fig. 87\qquad Maximum allowable deflection values}}}\]
V aplikaci je možné zobrazit průhyby od stálého zatížení ΔPL a od proměnného zatížení ΔIL samostatně, jakož i celkový průhyb ΔTot (stálé + proměnné), a to vše při zobrazení deformovaného tvaru.
Průhyby na zkrácených koncích nelze posuzovat.
Šířka trhliny
Šířky trhlin a orientace trhlin se počítají pro krátkodobé nebo dlouhodobé kombinace mezního stavu použitelnosti. Metoda přímého výpočtu šířek trhlin v aplikaci je v souladu s (vychází z) metody uvedené v AS 3600 8.6.2.3.
Posouzení jsou prezentována následovně:
\[\frac{w}{w_{lim}}\]
kde:
w krátkodobá nebo dlouhodobá šířka trhliny vypočtená metodou konečných prvků,
wlim limitní hodnota šířky trhliny definovaná uživatelem.
Doporučené maximální šířky trhlin lze nalézt v AS3600:2018 Sup 1:2022 Table C2.3.3.1.
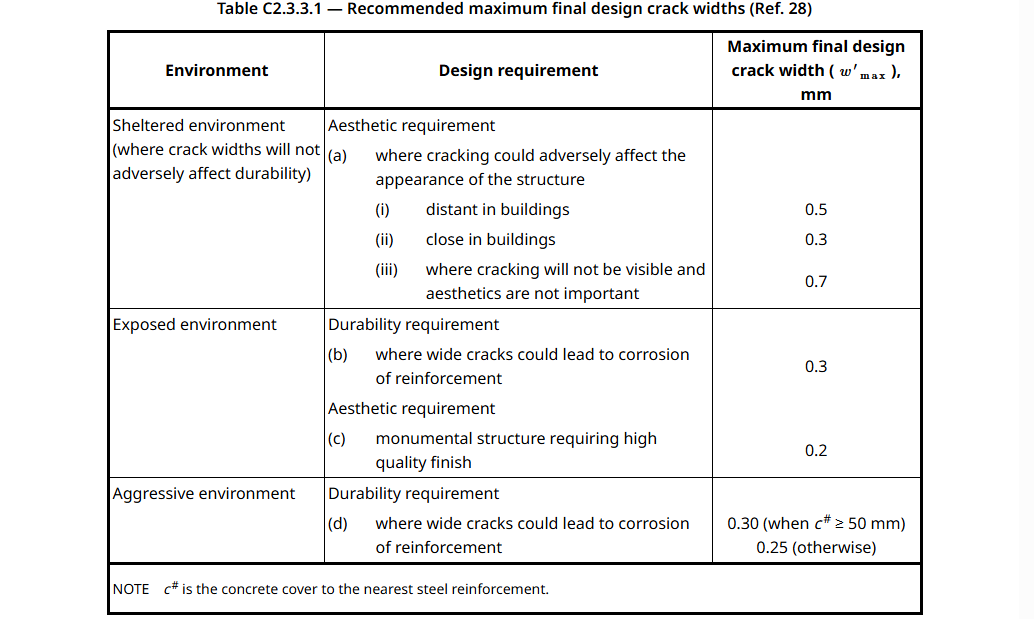
\[ \textsf{\textit{\footnotesize{Fig. 88\qquad Recommended final design crack widths}}}\]
Alternativně, podle AS3600:2018 Sup 1:2022 Cl. C8.6.1 – Pro konstrukce vystavené dlouhodobým provozním zatížením jsou doporučené hodnoty wlim následující:
\[ \textsf{\textit{\footnotesize{Fig. 89\qquad Recommended values for the limit value of the crack width for beams based on exposure classes}}}\]
Existují dva způsoby výpočtu šířek trhlin (stabilizované a nestabilizované trhlinové schéma). V obecném případě (stabilizované trhlinové schéma) se šířka trhliny počítá integrací přetvoření na 1D prvcích výztužných prutů. Směr trhliny se pak vypočítá ze tří nejbližších (od středu daného 1D konečného prvku výztuže) integračních bodů 2D prvků betonu. Ačkoli tento přístup k výpočtu směrů trhlin neodpovídá skutečné poloze trhlin, poskytuje reprezentativní hodnoty, které vedou k výsledkům šířek trhlin srovnatelným s hodnotami šířek trhlin požadovanými normou v poloze výztužného prutu.
8 Prestressing - model description
Úvod a materiálové modely
Compatible Stress Field Method (CSFM) je výpočetní metoda založená na stěnové napjatosti, ve které je beton modelován pomocí 2D konečných prvků, na které jsou pomocí vazeb připojeny 1D prvky výztuže. V modelu mohou být také typy 1D elementů reprezentující soudržnou předpínací výztuž, která může být modelována jako předem i dodatečně předpjatá.
Předpjatá výztuž je modelována obdobně jako klasická výztuž pomocí liniových elementů přenášejících axiální sílu. Každý Jednotlivý element předpjaté výztuže je charakterizován jeho plochou a materiálovými vlastnostmi. Tyto vlastnosti jsou dány charakteristickou materiálovou křivkou dle ČSN EN 1992-1-1
Pracovní diagram předpínací výztuže: a) pracovní diagram definovaný v ČSN EN 1992-1-1; b) počáteční přetvoření pro předem předpjatou výztuž
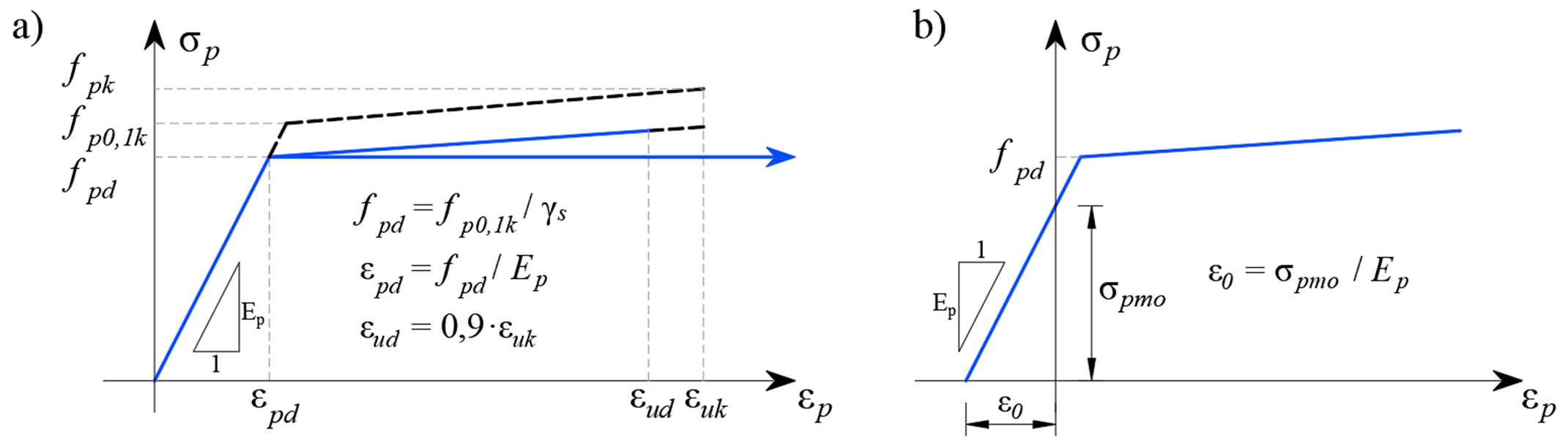
Elementy výztuže jsou spojeny pomocí bond modelu s plošnými elementy modelu betonu shodně jako klasická betonářská výztuž.
- Přečtěte si: Finite element types
Elementy bond modelu umožňují vzájemnou relativní deformaci předpjaté výztuže a betonu s patřičnou nelineární charakteristikou. Tímto je korektně modelována soudržnost výztuže s betonem, a tedy i model kotvení předem předpjaté výztuže. Koncové úpravy zejména dodatečně předpjaté výztuže, např. roznášecí deska, jsou modelovány pomocí prvku s tuhostí odpovídající kotvě na konci předpjaté výztuže a koncová předpínací síla je zavedena jako plošné zatížení do modelu betonu na ploše velikosti kotevní desky. Model nemůže korektně popsat lokální trojosou napjatost v podkotevní oblasti, a je nutno tuto oblast posoudit separátně.
Tahové ztužení výztuže vlivem spolupůsobení betonu není na předpjaté výztuži uvažováno, protože se předpokládá že beton v okolí předpjaté výztuže je v tlaku.
Předem předpjatá soudržná výztuž
Předem předpjatá výztuž je předpínána před samotnou betonáží prvku, předpínací výztuž je téměř vždy vedena jako přímá, proto nevznikají žádné ztráty předpětí třením. Po dosažení potřebné pevnosti betonu je výztuž uvolněna z kotevních bloků, čímž dojde k aktivaci předpjaté výztuže a přenosu sil z výztuže do objemu betonu. Tento efekt je fyzikálně ekvivalentní podchlazení výztuže a je modelován počátečním přetvořením obdobně jako u zatížení teplotou. Tím dostáváme pracovní diagram předpjaté výztuže dle Obrrázku výše. Výpočtový model automaticky spočítá deformační odezvu konstrukce na vnesené předpětí, a tedy přímo určí ztráty předpětí pružným přetvořením prvku.
Protože je předpínací síla známa, a tedy i předpínací napětí σpmo, pro závislost napětí na přetvoření se použije materiálový diagram výztuže a lze psát:
\[{{σ}_{p}}=~{{f}}({{ε}}-{{ε}_{0}})\]
Za předpokladu, že předpětí ve výztuži je nižší než mez kluzu (tedy jsou splněny podmínky definované v ČSN EN 1992-1-1 kap. 5.10.3), lze rovnou počáteční přetvoření spočítat jako:
\[{{ε}_{0}}=\frac{{{σ}_{pm0}}}{{{E}_{p}}}\]
ε0 - počáteční přetvoření od předpětí
σpm0 - napětí po zakotvení
Ep - Youngův modul pružnosti předpínací výztuže
Předem předpjatá výztuž je specifická tím, že její kotvení koncových částí je realizováno několika různými mechanismy – adheze výztuže a betonu na molekulární úrovni, tření vzniklé na rozmezí povrchu výztuže a betonu, mechanické zatlačení spirálovité výztuže do betonu a zvětšení průměru předpínací výztuže známé jako klínový mechanismus, nebo Hoyerův efekt. Zmíněné vlivy jsou zahrnuty do výpočtového modelu CSFM úpravou vlastností modelu kotvení v koncové oblasti předem předpjaté výztuže.
Spolupůsobení předem předpjaté výztuže a betonu: a) efekt zatlačení spirálovité výztuže do betonu; b) Hoyerův efekt
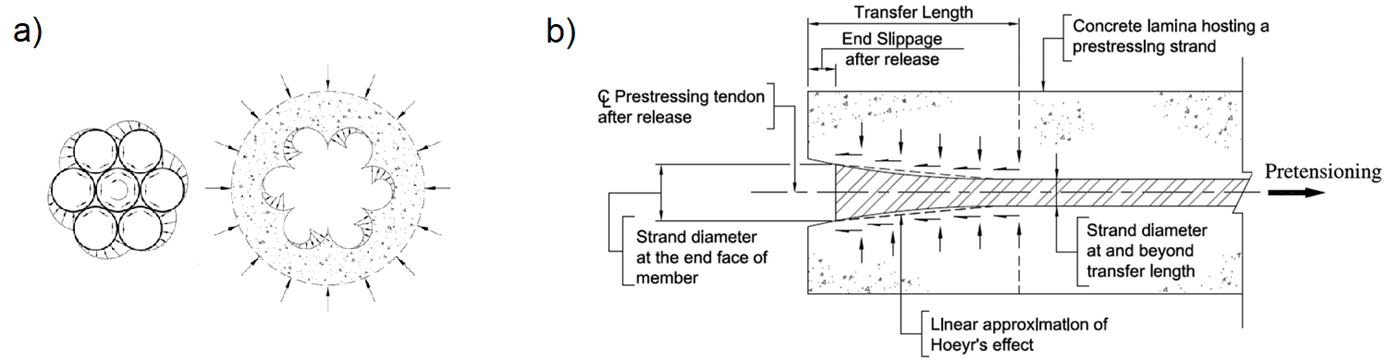
Dodatečně předpjatá soudržná výztuž
Dodatečně předpjatá výztuž je předpínána po zmonolitnění konstrukce. Předpínací zařízení je opřeno přímo do konstrukce, čímž se eliminují ztráty pružným přetvořením konstrukce od předpětí. Po dosažení požadované předpínací síly je výztuž zakotvena, následně jsou kabelové kanálky zainjektovány, čímž je dosaženo soudržnosti výztuže s konstrukcí. Při modelování dodatečně předpjaté výztuže je z toho důvodu výpočet rozdělen do několika zatěžovacích kroků – předpínání, aplikace ostatního stálého zatížení a aplikace proměnného zatížení.
Konečně-prvková síť betonu s připojenými 1D elementy předpínací výztuže:
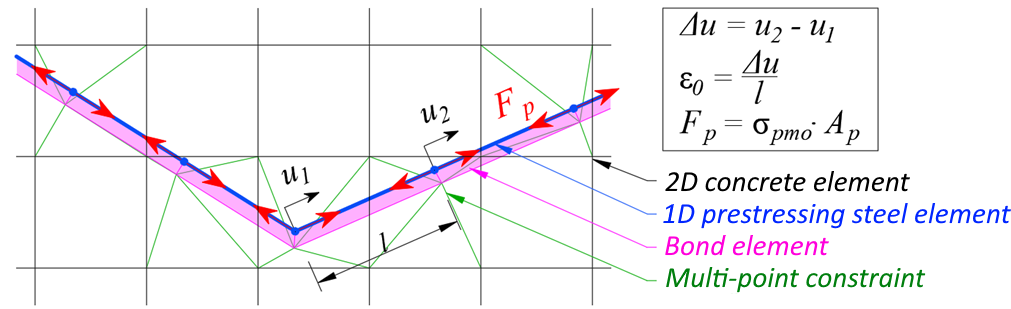
Zatěžovací krok „předpínání“
Při předpínání výztuže se tuhost výztuže nezapojuje do tuhosti konstrukce. V tomto zatěžovacím kroku není tuhost liniového elementu v modelu uvažována, elementy výztuže jsou nahrazeny náhradním zatížením odpovídající průběhu předpínacího napětí a plochy výztuže dle obrázku výše. Po dosažení plného zatížení od předpětí a konvergence tohoto zatěžovacího kroku je odečtena deformace konkrétního liniového prvku, na základě které je stanoveno počáteční přetvoření εo jednotlivých liniových elementů předpínací výztuže.
Předpínací napětí může být po délce výztuže definováno ručně, případně spočteno automaticky na základě geometrie výztuže. V případě volby automatického výpočtu ztrát se uvažuje se ztrátou třením (dle ČSN EN 1992-1-1 kap. 5.10.5.2) a pokluzem výztuže (zatlačení kotevních klínků) při kotvení. Protože je veškerá výztuž aplikována v jednom kroku, neuvažuje se ztrátou postupným předpínáním.
Následné zatěžovací kroky se zapojenou předpínací výztuží
V následujících zatěžovacích krocích (aplikace ostatního stálého a proměnného zatížení) je postupováno shodně jako u předem předpjaté výztuže. Je uvažována plná tuhost předpjaté výztuže, soudržnost mezi výztuží a okolním betonem, pracovní diagram předpínací výztuže je modifikován o počáteční přetvoření ε0. Toto přetvoření je pro každý prvek jiné a bylo získáno z předchozího zatěžovacího kroku „předpínání“. Díky soudržnosti výztuže a betonu je v modelu korektně uvažována ztráta předpětí způsobena pružným přetvořením konstrukce od vnějšího zatížení.
References
ACI Committee 318. 2019. Building Code Requirements for Structural Concrete (ACI 318-19) and Commentary. Farmington Hills, MI: American Concrete Institute.
Alvarez, Manuel. 1998. Einfluss des Verbundverhaltens auf das Verformungsvermögen von Stahlbeton. IBK Bericht 236. Basel: Institut für Baustatik und Konstruktion, ETH Zurich, Birkhäuser Verlag.
Beeby, A. W. 1979. “The Prediction of Crack Widths in Hardened Concrete.” The Structural Engineer 57A (1): 9–17.
Broms, Bengt B. 1965. “Crack Width and Crack Spacing In Reinforced Concrete Members.” ACI Journal Proceedings 62 (10): 1237–56. https://doi.org/10.14359/7742.
Burns, C.. 2012. “Serviceability Analysis of Reinforced Concrete Members Based on the Tension Chord Model.” IBK Report Nr. 342, Zurich, Switzerland: ETH Zurich.
Crisfield, M. A. 1997. Non-Linear Finite Element Analysis of Solids and Structures. Wiley.
European Committee for Standardization (CEN). 2015. 1 Eurocode 2: Design of concrete structures - Part 1-1: General rules and rules for buildings. Brussels: CEN, 2005.
Fernández Ruiz, M., and A. Muttoni. 2007. “On Development of Suitable Stress Fields for Structural Concrete.” ACI Structural Journal 104 (4): 495–502.
Kaufmann, W., J. Mata-Falcón, M. Weber, T. Galkovski, D. Thong Tran, J. Kabelac, M. Konecny, J. Navratil, M. Cihal, and P. Komarkova. 2020. “Compatible Stress Field Design Of Structural Concrete. Berlin, Germany.”AZ Druck und Datentechnik GmbH, ISBN 978-3-906916-95-8.
Kaufmann, W., and P. Marti. 1998. “Structural Concrete: Cracked Membrane Model.” Journal of Structural Engineering 124 (12): 1467–75. https://doi.org/10.1061/(ASCE)0733-9445(1998)124:12(1467).
Kaufmann, W.. 1998. “Strength and Deformations of Structural Concrete Subjected to In-Plane Shear and Normal Forces.” Doctoral dissertation, Basel: Institut für Baustatik und Konstruktion, ETH Zürich. https://doi.org/10.1007/978-3-0348-7612-4.
Konečný, M., J. Kabeláč, and J. Navrátil. 2017. Use of Topology Optimization in Concrete Reinforcement Design. 24. Czech Concrete Days (2017). ČBS ČSSI. https://resources.ideastatica.com/Content/06_Detail/Verification/Articles/Topology_optimization_US.pdf.
Marti, P. 1985. “Truss Models in Detailing.” Concrete International 7 (12): 66–73.
Marti, P. 2013. Theory of Structures: Fundamentals, Framed Structures, Plates and Shells. First edition. Berlin, Germany: Wiley Ernst & Sohn.
http://sfx.ethz.ch/sfx_locater?sid=ALEPH:EBI01&genre=book&isbn=9783433029916.
Marti, P., M.Alvarez, W. Kaufmann, and V. Sigrist. 1998. “Tension Chord Model for Structural Concrete.” Structural Engineering International 8 (4): 287–298.
https://doi.org/10.2749/101686698780488875.
Mata-Falcón, J. 2015. “Serviceability and Ultimate Behaviour of Dapped-End Beams (In Spanish: Estudio Del Comportamiento En Servicio y Rotura de Los Apoyos a Media Madera).” PhD thesis, Valencia: Universitat Politècnica de València.
Meier, H. 1983. “Berücksichtigung Des Wirklichkeitsnahen Werkstoffverhaltens Beim Standsicherheitsnachweis Turmartiger Stahlbetonbauwerke.” Institut für Massivbau, Universität Stuttgart.
Navrátil, J., P. Ševčík, L. Michalčík, P. Foltyn, and J. Kabeláč. 2017. A Solution for Walls and Details of Concrete Structures. 24. Czech Concrete Days.
Schlaich, J., K. Schäfer, and M. Jennewein. 1987a. “Toward a Consistent Design of Structural Concrete.” PCI Journal 32 (3): 74–150.
Standards Australia. 2018. Concrete Structures (AS 3600:2018). Sydney, NSW: Standards Australia.
Standards Australia. 2022. Concrete Structures – Commentary (Supplement 1 to AS 3600:2018). Sydney, NSW: Standards Australia.
Vecchio, F.J., and M.P. Collins. 1986. “The Modified Compression Field Theory for Reinforced Concrete Elements Subjected to Shear.” ACI Journal 83 (2): 219–31.