Le contexte théorique est basé sur COMPATIBLE STRESS FIELD DESIGN OF STRUCTURAL CONCRETE
(Kaufmann et al., 2020)
Dimensionnement structurel des discontinuités en béton dans IDEA StatiCa Detail
1 Introduction à la méthode CSFM
1.1 Introduction générale au dimensionnement structurel des détails en béton
1.2 Hypothèses principales et limitations
1.3 Outils de dimensionnement du ferraillage
2 Modèle d'analyse de IDEA StatiCa Detail
2.1 Introduction à la mise en œuvre par éléments finis
2.2 Appuis et composants de transmission des charges
2.3 Transfert de charge aux extrémités réduites des poutres
2.4 Modification géométrique des sections transversales
2.5 Types d'éléments finis
2.6 Maillage
2.7 Méthode de résolution et algorithme de contrôle du chargement
2.8 Présentation des résultats
3 Vérification du modèle
3.1 États limites, calcul de la largeur des fissures et raidissement en traction
4 Vérifications structurelles selon l'EUROCODE
4.1 Modèles de matériaux (EN)
4.2 Coefficients de sécurité
4.3 Analyse à l'état limite ultime
4.4 Zones partiellement chargées (ZPC)
4.5 Analyse à l'état limite de service
5 Vérifications structurelles selon ACI 318-19
5.1 Modèles de matériaux (ACI)
5.2 Coefficients de réduction de résistance et coefficients de charge
5.3 Vérifications de résistance
5.4 Zones d'appui et d'ancrage - Zones partiellement chargées
5.5 Vérifications à l'état limite de service
6 Vérifications structurelles selon AASHTO
6.1 Modèles de matériaux (AASHTO)
6.2 Coefficients de résistance et de charge
6.3 État limite de résistance
6.4 Résistance des zones d'appui et d'ancrage – Zones partiellement chargées
6.5 État limite de service
7 Vérifications structurelles selon AS 3600
7.1 Modèles de matériaux (AUS)
7.2 Coefficients de réduction des contraintes et coefficients de charge
7.3 Vérifications de résistance et d'ancrage
7.4 Vérifications à l'état limite de service
8 Précontrainte dans Detail - Description du modèle
1 Introduction à la méthode CSFM
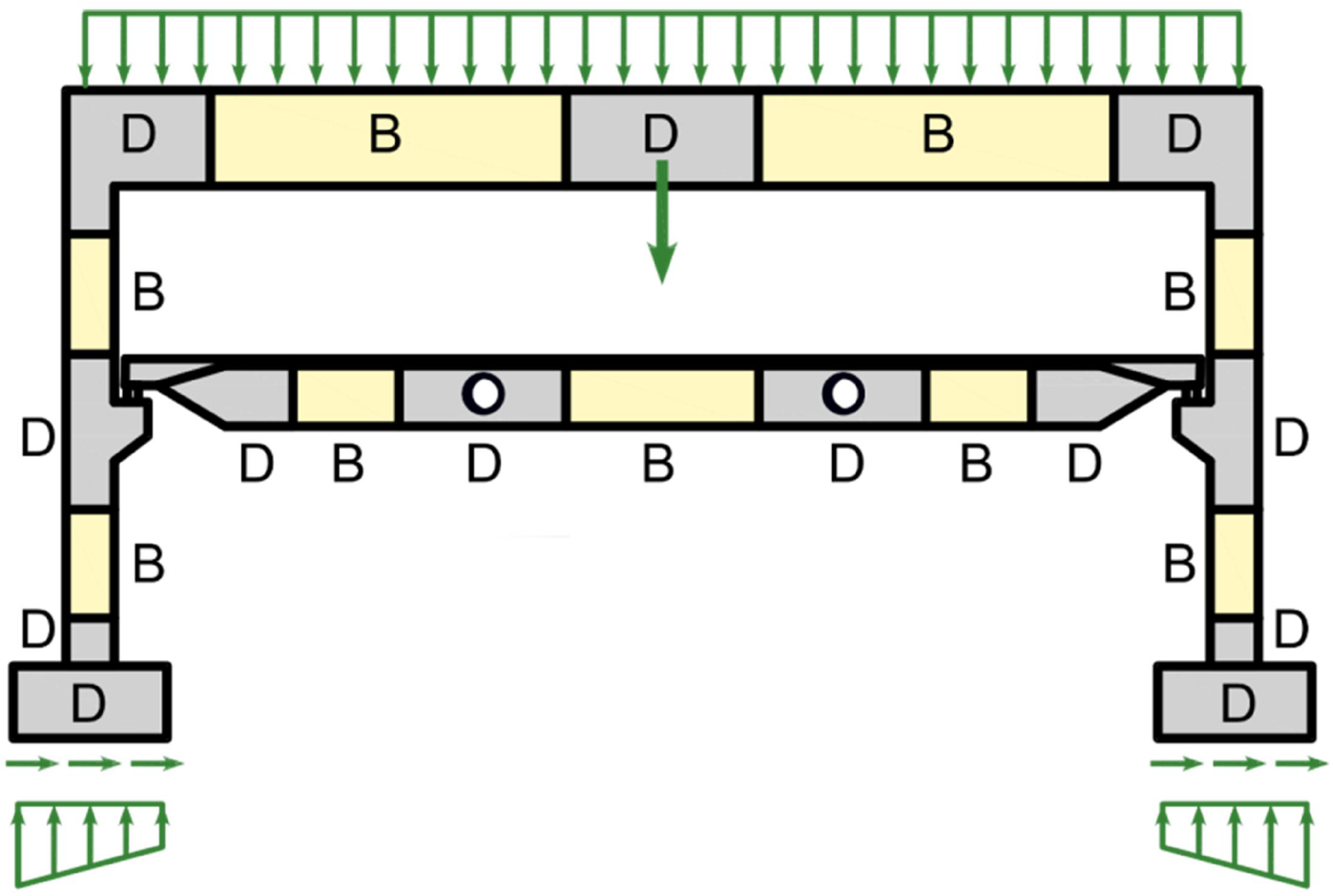
La conception et l'évaluation des éléments en béton sont normalement effectuées au niveau de la section (élément 1D) ou au niveau ponctuel (élément 2D). Cette procédure est décrite dans toutes les normes de conception structurelle, par exemple dans (EN 1992-1-1 ou ACI 318-19), et elle est utilisée dans la pratique courante de l'ingénierie structurelle. Cependant, il n'est pas toujours connu ou respecté que la procédure n'est acceptable que dans les zones où l'hypothèse de Bernoulli-Navier de distribution plane des déformations s'applique (appelées régions B). Les endroits où cette hypothèse ne s'applique pas sont appelés régions de discontinuité ou régions perturbées (régions D). Des exemples de régions B et D pour des éléments 1D sont donnés en (Fig. 1). Il s'agit, par exemple, des zones d'appui, des parties où des charges concentrées sont appliquées, des emplacements où un changement brusque de la section transversale se produit, des ouvertures, etc. Lors de la conception de structures en béton, on rencontre de nombreuses autres régions D telles que les voiles, les diaphragmes de ponts, les corbeaux, etc.
Dans le passé, des règles de conception semi-empiriques étaient utilisées pour le dimensionnement des régions de discontinuité. Heureusement, ces règles ont été largement remplacées au cours des dernières décennies par des modèles Bielle-et-tirant (Schlaich et al., 1987) et des champs de contraintes (Marti 1985), qui figurent dans les codes de conception actuels et sont fréquemment utilisés par les concepteurs aujourd'hui. Ces modèles sont des outils mécaniquement cohérents et puissants. Il convient de noter que les champs de contraintes peuvent généralement être continus ou discontinus, et que les modèles Bielle-et-tirant constituent un cas particulier des champs de contraintes discontinus.
Malgré l'évolution des outils de calcul au cours des dernières décennies, les modèles Bielle-et-Tirant sont encore essentiellement utilisés comme calculs manuels. Leur application pour des structures réelles est fastidieuse et chronophage, car des itérations sont nécessaires et plusieurs cas de charge doivent être pris en compte. De plus, cette méthode n'est pas adaptée à la vérification des critères de serviceabilité (déformations, largeurs de fissures, etc.).
L'intérêt des ingénieurs structure pour un outil fiable et rapide permettant de concevoir les régions D a conduit à la décision de développer la nouvelle Méthode du Champ de Contraintes Compatible, une méthode de conception assistée par ordinateur des champs de contraintes qui permet la conception et l'évaluation automatiques des éléments en béton structurel soumis à des chargements dans leur plan.
La Méthode du Champ de Contraintes Compatible (CSFM) est une méthode d'analyse des champs de contraintes continue basée sur les éléments finis, dans laquelle les solutions classiques de champs de contraintes sont complétées par des considérations cinématiques, c'est-à-dire que l'état de déformation est évalué dans l'ensemble de la structure. Ainsi, la résistance effective à la compression du béton peut être calculée automatiquement en fonction de l'état de déformation transversale, de manière similaire aux analyses de champs de compression qui tiennent compte de l'adoucissement en compression (Vecchio et Collins 1986 ; Kaufmann et Marti 1998) et à la méthode EPSF (Fernández Ruiz et Muttoni 2007). De plus, le CSFM prend en compte le raidissement en traction, fournissant des rigidités réalistes aux éléments, et couvre toutes les prescriptions des codes de conception (y compris les aspects de serviceabilité et de capacité de déformation) qui n'étaient pas traités de manière cohérente par les approches précédentes. Le CSFM utilise des lois de comportement uniaxiales courantes fournies par les normes de conception pour le béton et le ferraillage. Celles-ci sont connues au stade de la conception, ce qui permet d'utiliser la méthode des coefficients partiels de sécurité. Ainsi, les concepteurs n'ont pas à fournir des propriétés matérielles supplémentaires, souvent arbitraires, telles que celles généralement requises pour les analyses EF non linéaires, ce qui rend la méthode parfaitement adaptée à la pratique de l'ingénierie.
Pour favoriser l'utilisation des champs de contraintes assistés par ordinateur par les ingénieurs structure, ces méthodes doivent être implémentées dans des environnements logiciels conviviaux. À cette fin, le CSFM a été implémenté dans IDEA StatiCa Detail ; un nouveau logiciel commercial convivial développé conjointement par l'ETH Zurich et la société de logiciels IDEA StatiCa dans le cadre du projet DR-Design Eurostars-10571.
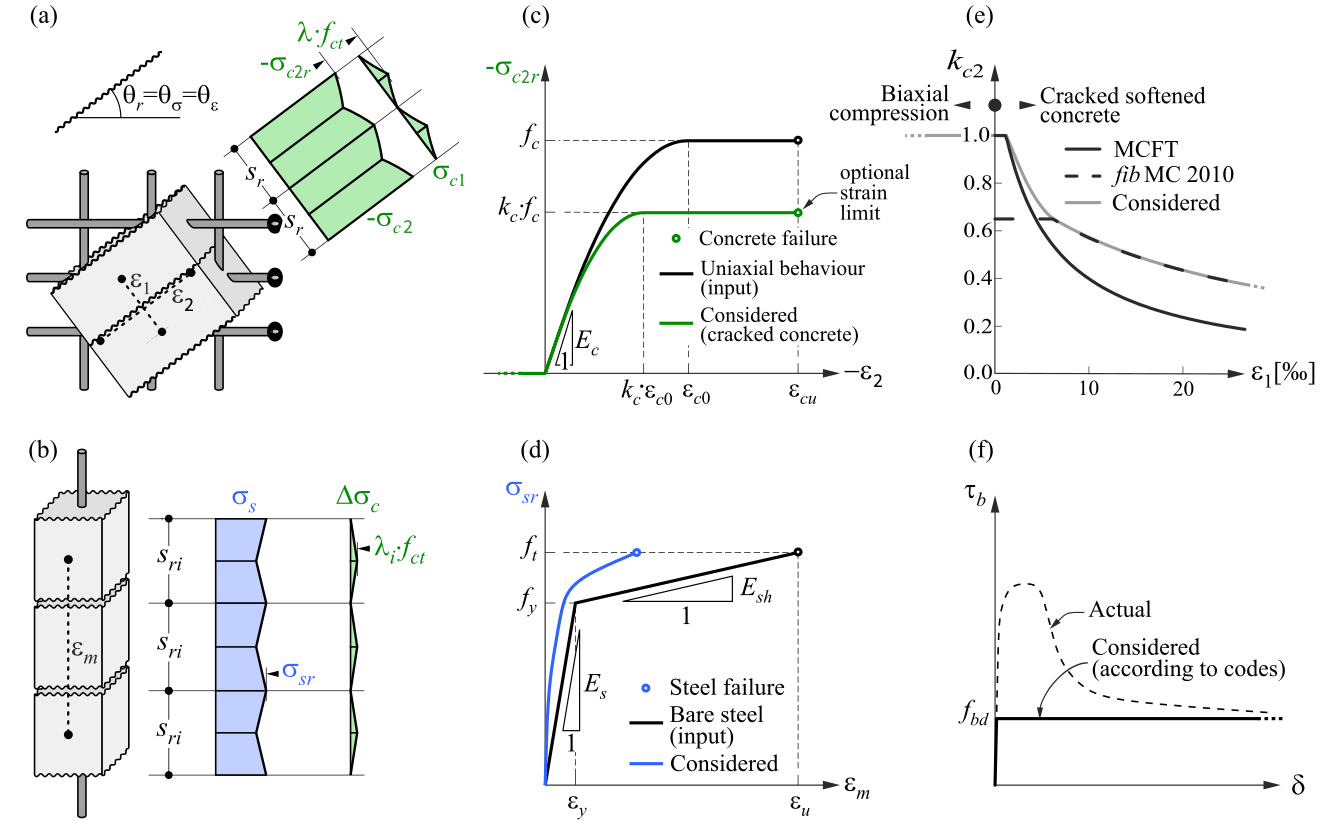
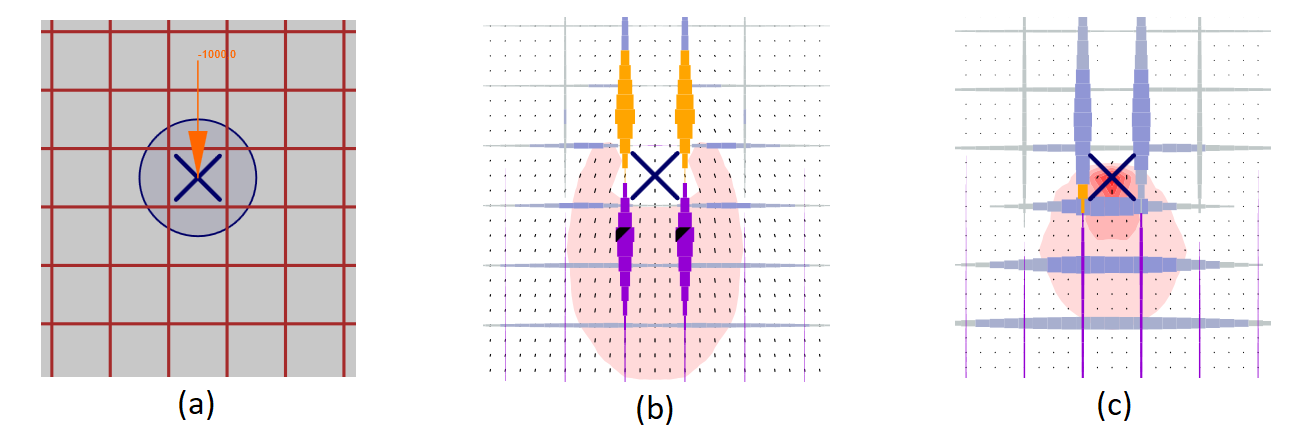
Le CSFM considère la contrainte principale maximale du béton en compression (σc2r) et les contraintes du ferraillage (σsr) aux fissures, tout en négligeant la résistance à la traction du béton (σc1r = 0), à l'exception de son effet de raidissement en traction sur le ferraillage. La prise en compte du raidissement en traction permet de simuler les déformations moyennes du ferraillage (εm). Des fissures fictives, tournantes, sans contrainte, qui s'ouvrent sans glissement (Fig. 2a) sont considérées, et l'équilibre aux fissures ainsi que les déformations moyennes du ferraillage sont également pris en compte.
Malgré leur simplicité, des hypothèses similaires ont démontré leur capacité à fournir des prédictions précises pour les éléments en béton armé soumis à des chargements dans leur plan (Kaufmann 1998 ; Kaufmann et Marti 1998), à condition que le ferraillage mis en place évite les ruptures fragiles à la fissuration. De plus, la non-prise en compte de toute contribution de la résistance à la traction du béton à la charge ultime est cohérente avec les principes des codes de calcul modernes, qui sont principalement fondés sur la théorie de la plasticité.
Cependant, le CSFM n'est pas adapté aux éléments élancés sans ferraillage transversal, car les mécanismes déterminants pour de tels éléments — tels que l'engrènement des granulats, les contraintes de traction résiduelles en pointe de fissure et l'effet de goujon — qui dépendent tous directement ou indirectement de la résistance à la traction du béton, sont ignorés. Bien que certaines normes de calcul autorisent le dimensionnement de tels éléments sur la base de dispositions semi-empiriques, le CSFM n'est pas destiné à ce type de structure potentiellement fragile.
Béton
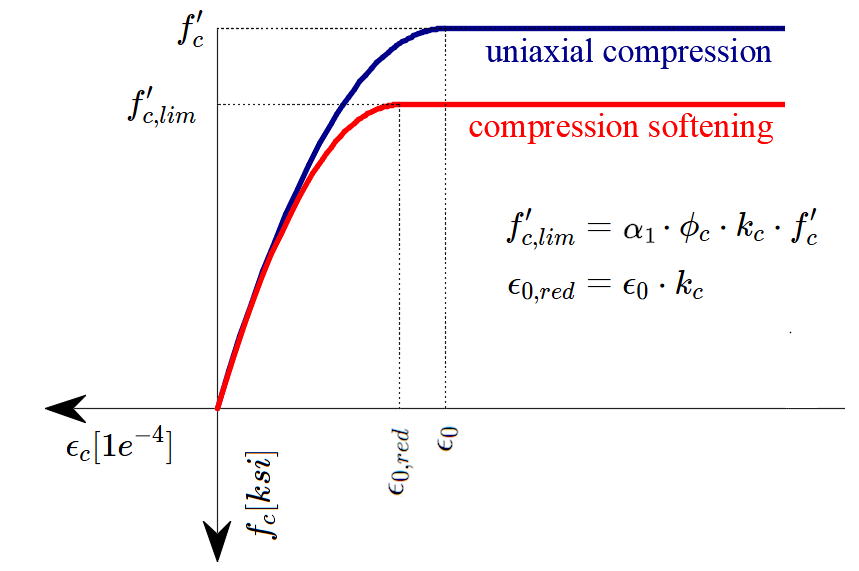
Le modèle de béton implémenté dans le CSFM est basé sur les lois constitutives uniaxiales en compression prescrites par les codes de calcul pour le dimensionnement des sections transversales, qui ne dépendent que de la résistance en compression. Le diagramme parabole-rectangle (Fig. 2c) est utilisé par défaut dans le CSFM, mais les concepteurs peuvent également choisir une relation élastique-parfaitement plastique plus simplifiée. Lors de la vérification selon le code ACI, seul le diagramme contrainte-déformation parabole-rectangle peut être utilisé. Comme mentionné précédemment, la résistance à la traction est négligée, comme c'est le cas dans le calcul classique du béton armé.
La résistance en compression effective est automatiquement évaluée pour le béton fissuré en fonction de la déformation principale de traction (ε1) au moyen du facteur de réduction kc2, comme illustré aux Fig. 2c et e. La relation de réduction implémentée (Fig. 2e) est une généralisation de la proposition du fib Model Code 2010 pour les vérifications au cisaillement, qui contient une valeur limite de 0,65 pour le rapport maximal entre la résistance effective du béton et la résistance en compression du béton, non applicable à d'autres cas de chargement.
Le CSFM dans IDEA StatiCa Detail ne considère pas de critère de rupture explicite en termes de déformations pour le béton en compression (c'est-à-dire qu'il considère une branche infiniment plastique après l'atteinte de la contrainte maximale). Cette simplification ne permet pas de vérifier la capacité de déformation des structures dont la rupture se produit en compression. Cependant, leur capacité ultime est correctement prédite lorsque, en plus du facteur du béton fissuré (kc2) défini à la (Fig. 2e), l'augmentation de la fragilité du béton avec l'accroissement de sa résistance est prise en compte au moyen du facteur de réduction défini dans le fib Model Code 2010 comme suit :
où :
kc est le facteur de réduction global de la résistance en compression
kc2 est le facteur de réduction dû à la présence de fissuration transversale
fc est la résistance caractéristique du béton sur cylindre (en MPa pour la définition de ).
Il existe également une réduction du facteur kc2 pour des raisons de stabilité du calcul. Cette réduction n'influence pas la résistance totale des éléments. En considérant la valeur fcd comme la résistance de calcul du béton (valeur de calcul), la valeur de kc2 est réduite selon les règles suivantes.
σc2r < 0.11fcd kc2=1.0
0.11fcd < σc2r < 0.37fcd kc2 est une interpolation linéaire entre 1,0 et la valeur tirée du
graphique présenté à la Fig. 2f
σc2r > 0.37fcd kc2 est directement tiré du graphique de la Fig. 2f
Ferraillage
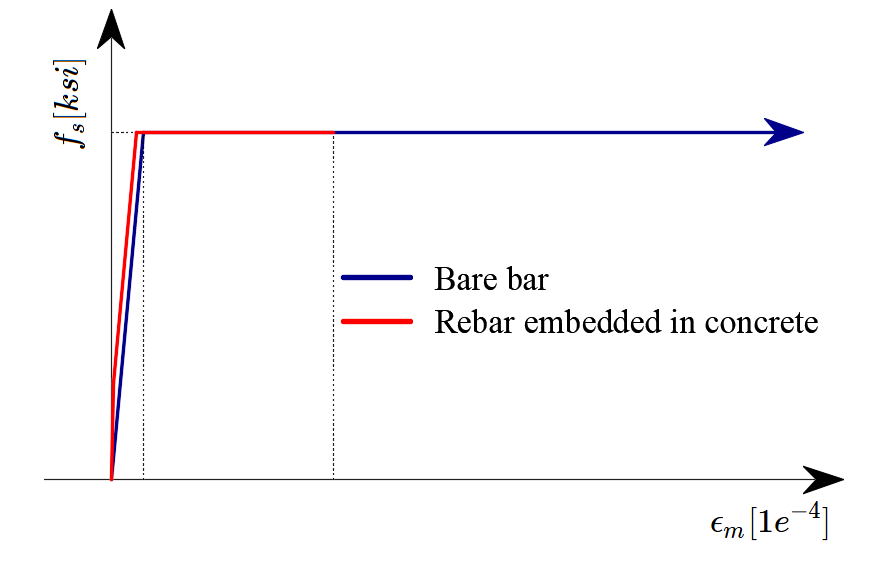
Le diagramme contrainte-déformation bilinéaire idéalisé pour les barres d'armature nues, généralement défini par les codes de calcul (Fig. 2d), est considéré. La définition de ce diagramme ne nécessite que la connaissance des propriétés de base du ferraillage lors de la phase de dimensionnement (résistance et classe de ductilité). Une relation contrainte-déformation définie par l'utilisateur peut également être spécifiée.
Le raidissement en traction est pris en compte en modifiant la relation contrainte-déformation d'entrée de la barre d'armature nue afin de reproduire la rigidité moyenne des barres noyées dans le béton (εm).
Modèle d'adhérence
Le glissement entre le ferraillage et le béton est introduit dans le modèle par éléments finis en considérant la relation constitutive rigide-parfaitement plastique simplifiée présentée à la Fig. 2f, où fbd est la valeur de calcul (valeur pondérée) de la contrainte d'adhérence ultime spécifiée par le code de calcul pour les conditions d'adhérence spécifiques.
Il s'agit d'un modèle simplifié dont le seul objectif est de vérifier les prescriptions d'adhérence conformément aux codes de calcul (c'est-à-dire l'ancrage du ferraillage). La réduction de la longueur d'ancrage lors de l'utilisation de crochets, de boucles et de formes similaires de barres peut être prise en compte en définissant une certaine capacité à l'extrémité du ferraillage, comme décrit plus loin.
Flux de travail et objectifs
L'objectif des outils de conception du ferraillage dans le CSFM est d'aider les concepteurs à déterminer l'emplacement et la quantité requise de barres d'armature de manière efficace. Les outils suivants sont disponibles pour aider / guider l'utilisateur dans ce processus : calcul linéaire et optimisation topologique.
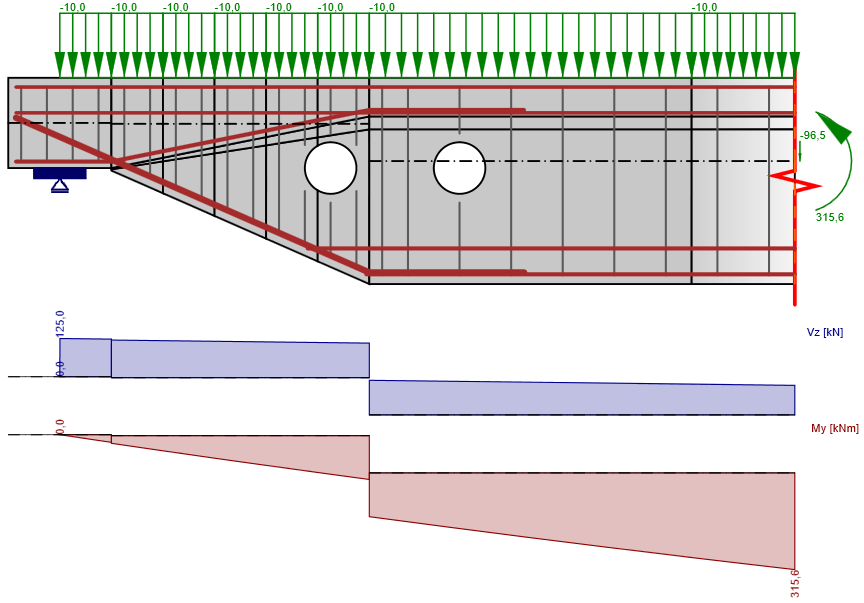
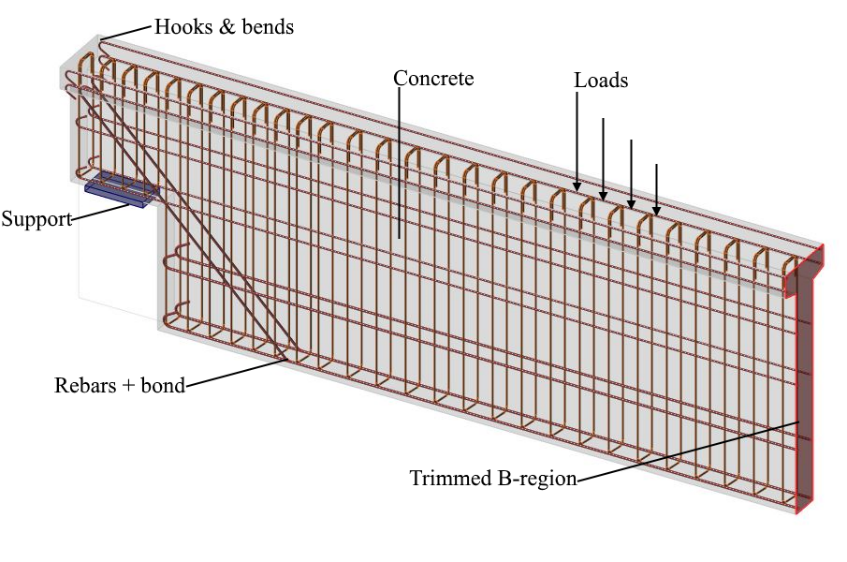
Les outils de conception du ferraillage utilisent des modèles de comportement plus simplifiés que ceux employés pour la vérification finale de la structure. Par conséquent, la définition du ferraillage à cette étape doit être considérée comme un pré-dimensionnement à confirmer/affiner lors de l'étape de vérification finale. L'utilisation des différents outils de conception du ferraillage sera illustrée sur le modèle présenté à la Fig. 3, qui représente une extrémité d'une poutre simplement appuyée à hauteur variable soumise à une charge uniformément répartie.
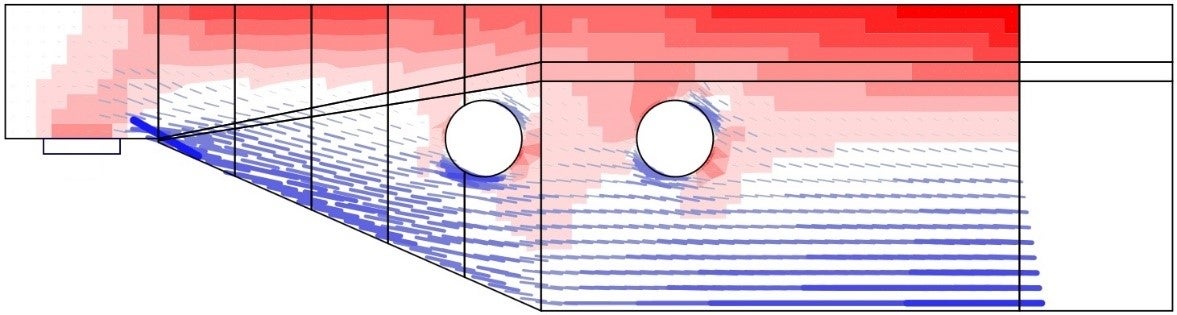
Analyse linéaire
L'analyse linéaire considère des propriétés de matériaux élastiques linéaires et néglige le ferraillage dans la région en béton. Il s'agit donc d'un calcul très rapide qui fournit un premier aperçu des zones de traction et de compression. Un exemple d'un tel calcul est présenté à la Fig. 4.
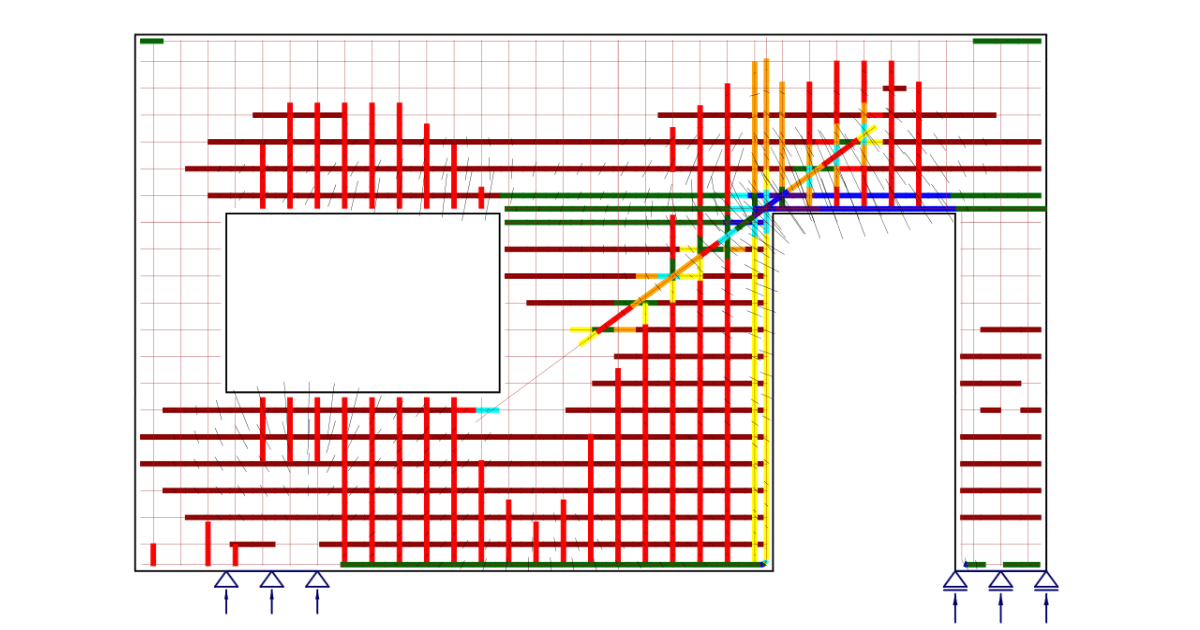
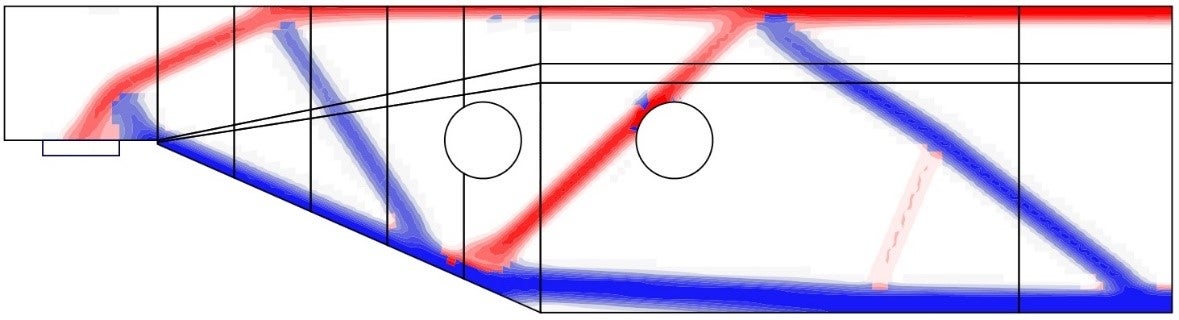
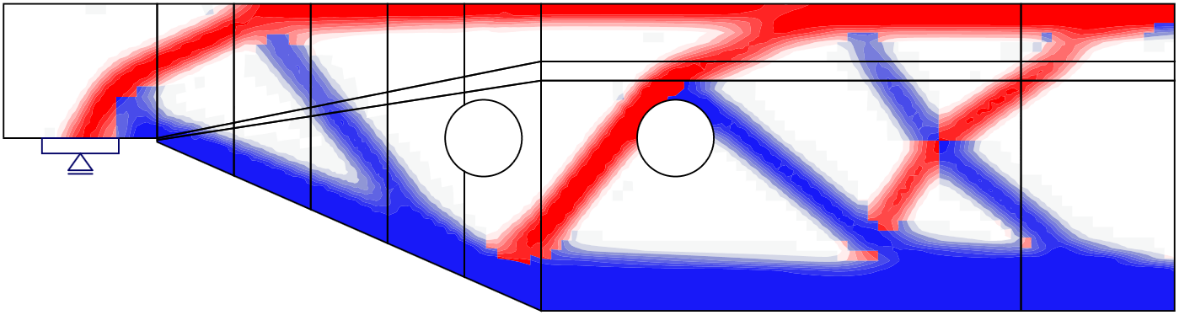
Optimisation topologique
L'optimisation topologique est une méthode qui vise à trouver la distribution optimale de matière dans un volume donné pour une configuration de charge déterminée. L'optimisation topologique implémentée dans Idea StatiCa Detail utilise un modèle par éléments finis linéaire. Chaque élément fini peut avoir une densité relative de 0 à 100 %, représentant la quantité relative de matière utilisée. Ces densités d'éléments constituent les paramètres d'optimisation du problème. La distribution de matière résultante est considérée comme optimale pour l'ensemble de charges donné si elle minimise l'énergie de déformation totale du système. Par définition, la distribution optimale est également la géométrie présentant la rigidité maximale possible pour les charges données.
Le processus d'optimisation itératif commence par une distribution de densité homogène. Le calcul est effectué pour plusieurs fractions volumiques totales (20 %, 40 %, 60 % et 80 %), ce qui permet à l'utilisateur de sélectionner le résultat le plus pratique. La forme résultante est constituée de treillis avec des bielles et des tirants et représente la forme optimale pour les cas de charge donnés (Fig. 5).
2 Modèle d'analyse de IDEA StatiCa Detail
Le CSFM considère des champs de contraintes continus dans le béton (éléments finis 2D), complétés par des éléments « barre » discrets représentant le ferraillage (éléments finis 1D). Par conséquent, le ferraillage n'est pas diffusément intégré dans les éléments finis 2D en béton, mais modélisé explicitement et connecté à ceux-ci. Un état de contrainte plane est considéré dans le modèle de calcul.
Les voiles et poutres entiers, ainsi que les détails (parties) de poutres (région de discontinuité isolée, également appelée extrémité tronquée), peuvent être modélisés. Dans le cas des voiles et des poutres entières, les appuis doivent être définis de manière à obtenir une structure (extérieurement) isostatique (statiquement déterminée) ou hyperstatique (statiquement indéterminée). Le transfert des charges aux extrémités tronquées des poutres est introduit au moyen d'une zone de transfert de Saint-Venant spéciale, qui assure une distribution réaliste des contraintes dans la région de détail analysée.
Pour modéliser la plupart des situations rencontrées lors du processus de construction, de nombreux types d'appuis (Fig. 7) et de composants utilisés pour le transfert des charges (Fig. 8) sont disponibles dans le CSFM.
Appuis
Un appui ponctuel peut être modélisé de plusieurs façons afin d'éviter la localisation des contraintes en un seul point et de les distribuer sur une zone plus étendue. La première option est un appui ponctuel distribué (Fig. 7a), qui répartit uniformément la charge sur le bord de l'élément sur une largeur définie.

L'appui surfacique (Fig. 7d), en revanche, ne peut être placé qu'à l'intérieur d'un volume de béton avec un rayon d'influence défini. Il est ensuite relié par des éléments rigides aux nœuds du maillage de ferraillage dans ce rayon. Il est donc nécessaire de définir une cage de ferraillage autour de l'appui surfacique.
Pour une modélisation plus précise de certains cas réels, deux autres options d'appui ponctuel sont disponibles. Premièrement, il existe un appui ponctuel avec une plaque d'appui de largeur et d'épaisseur définies (Fig. 7b). Le matériau de la plaque d'appui peut être spécifié, et l'ensemble de la plaque d'appui est maillé indépendamment. Deuxièmement, un appui suspendu est disponible (Fig. 7e), qui peut être utilisé pour modéliser des ancrages de levage ou des goujons de levage.
L'appui linéaire (Fig. 7c) peut être défini sur un bord (en spécifiant sa longueur) ou à l'intérieur d'un élément (par une polyligne). Il est également possible de spécifier sa rigidité et/ou son comportement non linéaire (appui en compression/traction ou uniquement en compression).
- Lire les descriptions détaillées dans Types of supports in IDEA StatiCa Detail
Composants de transmission des charges
L'introduction des charges dans la structure peut également être modélisée de plusieurs façons. Pour les charges ponctuelles, une plaque d'appui (Fig. 8a) peut être utilisée de manière similaire à un appui ponctuel, en distribuant la charge concentrée sur une zone plus grande grâce à une plaque en acier de largeur et d'épaisseur définies.
La charge ponctuelle peut être appliquée soit directement à la surface de la structure avec un rayon d'action défini (la charge est appliquée aux éléments en béton), soit via un dispositif de transmission spécial appelé charge surfacique (Fig. 8b et Fig. 9). La charge surfacique permet de transmettre la charge directement au ferraillage défini situé dans la zone du rayon d'influence. Pour assurer le bon fonctionnement de la charge surfacique, il est nécessaire de définir un groupe d'armatures qui seront interconnectées avec la charge (dans les propriétés du ferraillage). Lorsque le ferraillage interconnecté n'est pas défini, le mécanisme de transfert de charge est identique à celui d'une charge ponctuelle placée sur la surface d'un élément, et la charge est transférée par les contraintes aux éléments en béton, et non directement au ferraillage.
Les ancrages de levage ou les goujons de levage peuvent être modélisés par une charge suspendue (Fig. 8c). L'utilisateur peut utiliser une zone partiellement chargée (Fig. 8d), qui permet d'augmenter la capacité portante du béton en compression conformément à l'Eurocode (il n'est pas possible d'utiliser ce type de composant de transmission de charge lorsque l'ACI est sélectionné). La structure peut également être chargée par des charges linéaires sur les bords, par une polyligne générale ou par des charges surfaciques. L'application Detail est capable de prendre automatiquement en compte le poids propre dans l'analyse.
Dans de nombreux cas, nous devons modéliser uniquement un détail (partie) d'un élément structurel, tel qu'un appui de poutre, une ouverture au milieu de la poutre, etc. Cette approche peut conduire à des configurations d'appui instables mais admissibles dans IDEA StatiCa Detail (y compris le cas sans appui). Cependant, dans de tels cas, il est également nécessaire de modéliser la section représentant l'assemblage avec la région B adjacente, y compris les efforts intérieurs à cette section qui satisfont l'équilibre. Dans certains cas (par exemple, lors de la modélisation d'un appui de poutre), ces efforts intérieurs peuvent être déterminés automatiquement par le programme.
Entre la région B et la région de discontinuité analysée, une zone de transfert de Saint-Venant est automatiquement créée pour assurer une distribution réaliste des contraintes dans la région analysée. La largeur de la zone de transfert est déterminée comme la moitié de la hauteur de la section. Étant donné que le seul objectif de la zone de Saint-Venant est d'obtenir une distribution correcte des contraintes dans le reste du modèle, aucun résultat de cette zone n'est affiché lors de la vérification, et aucun critère d'arrêt n'est considéré ici.
Le bord de la zone de Saint-Venant qui représente l'extrémité réduite de la poutre est modélisé comme rigide, c'est-à-dire qu'il peut pivoter mais doit rester plan. Cela est réalisé en connectant tous les nœuds EF du bord à un nœud distinct au centre d'inertie de la section à l'aide d'un élément de corps rigide (RBE2). Les efforts intérieurs de l'élément peuvent alors être appliqués à ce nœud, comme illustré à la Fig. 10.

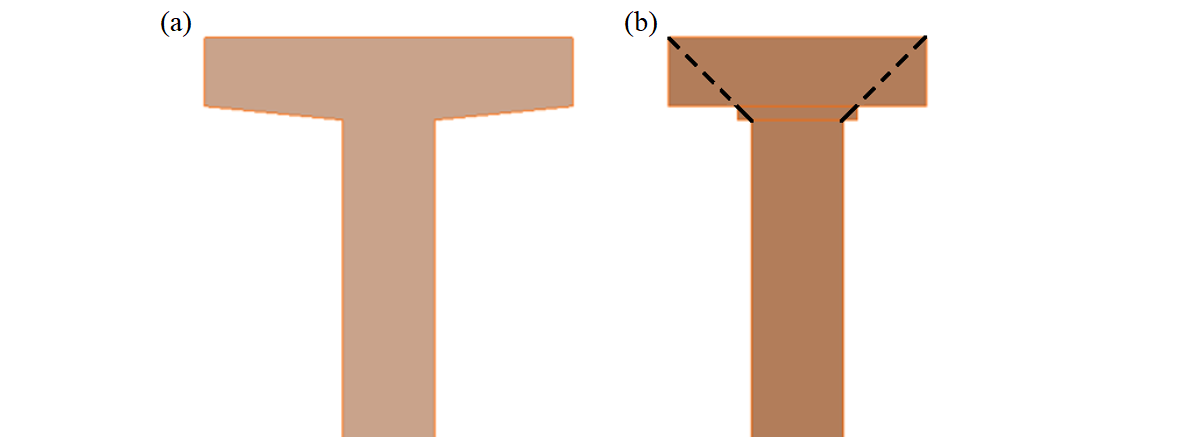
La réduction de la section transversale est automatiquement effectuée pour les structures définies comme un élément en poutre ou un assemblage de portique (défini par l'axe x et une section transversale). Cette modification est automatiquement appliquée aux sections transversales à semelles très larges (Fig. 11) et repose sur l'hypothèse qu'un champ de contraintes de compression se développe depuis la voile à un angle de 45°, de sorte que la largeur réduite susmentionnée représente la largeur maximale capable de transférer les charges.
Notez que la méthode de détermination de la largeur efficace de semelle implémentée dans CSFM diffère de celle énoncée au 5.3.2.1 de l'EN 1992-1-1 (2015) ou au 9.2.4.4 de l'ACI 318-19. Outre la géométrie, la largeur efficace de semelle selon l'Eurocode est explicitement influencée par les longueurs de travée et les conditions aux limites de la structure.
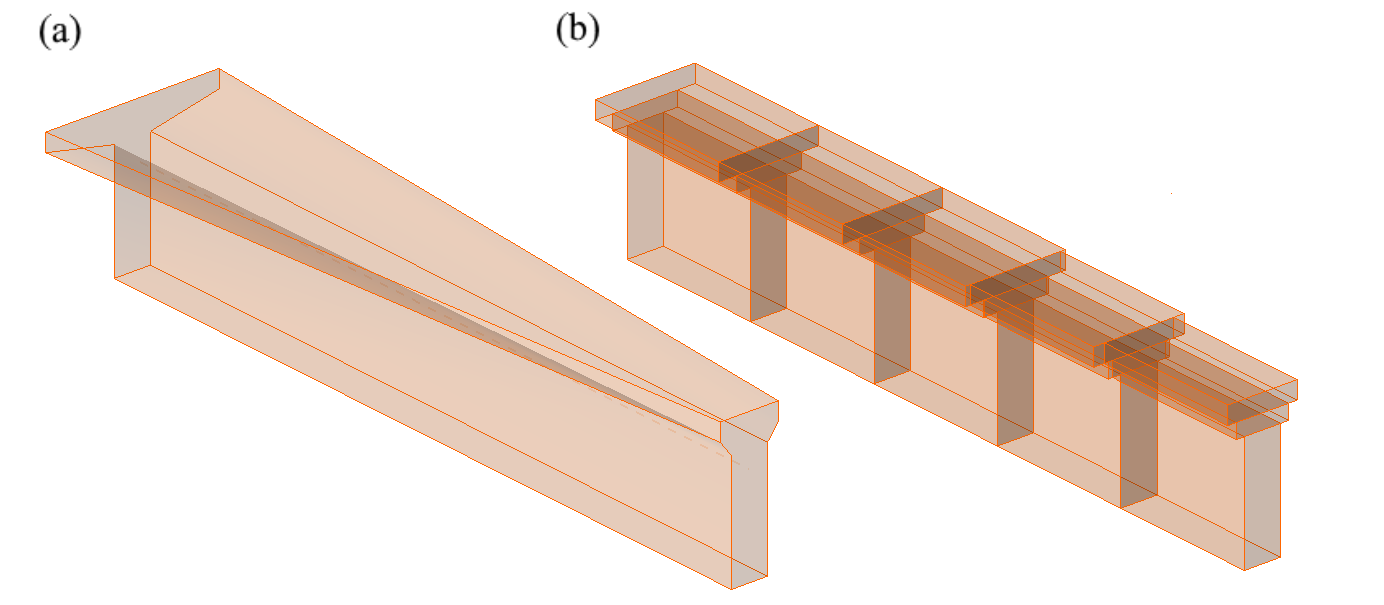
Dans le cas de jarrets situés dans le plan horizontal (Fig. 12), chaque jarret est divisé en cinq sections sur sa longueur. Chacune de ces sections est ensuite modélisée comme une voile d'épaisseur constante, égale à l'épaisseur réelle au milieu de la section correspondante.
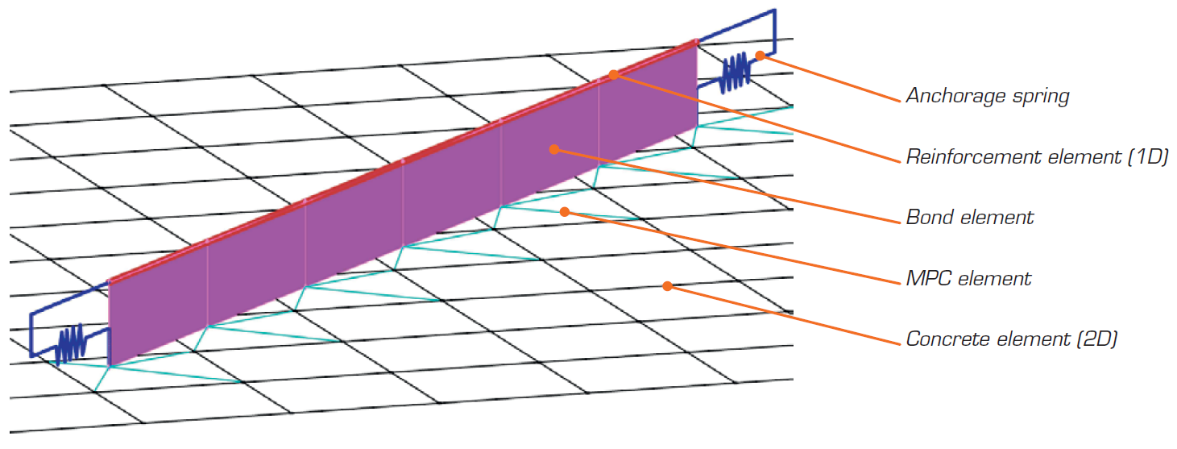
Le modèle d'analyse par éléments finis non linéaire (inélastique) est constitué de plusieurs types d'éléments finis utilisés pour modéliser le béton, le ferraillage et l'adhérence entre eux. Les éléments de béton et de ferraillage sont d'abord maillés indépendamment, puis connectés entre eux à l'aide de contraintes multi-points (éléments MPC). Cela permet au ferraillage d'occuper une position arbitraire et relative par rapport au béton. Si la vérification de la longueur d'ancrage doit être calculée, des éléments ressort d'adhérence et d'extrémité d'ancrage sont insérés entre le ferraillage et les éléments MPC.
Béton
Le béton est modélisé à l'aide d'éléments coques quadrilatéraux et trilatéraux, CQUAD4 et CTRIA3. Ceux-ci peuvent être définis respectivement par quatre ou trois nœuds. Seul l'état de contrainte plane est supposé exister dans ces éléments, c'est-à-dire que les contraintes ou déformations dans la direction z ne sont pas prises en compte.
Chaque élément possède quatre ou trois points d'intégration placés approximativement à 1/4 de sa taille. En chaque point d'intégration de chaque élément, les directions des déformations principales α1, α2 sont calculées. Dans chacune de ces directions, les contraintes principales σc1, σc2 et les rigidités E1, E2 sont évaluées selon le diagramme contrainte-déformation du béton spécifié, conformément à la Fig. 2. Il convient de noter que l'effet d'adoucissement en compression couple le comportement de la direction principale de compression à l'état actuel de l'autre direction principale.
Ferraillage
Les armatures sont modélisées par des éléments 1D « barre » à deux nœuds (CROD), qui ne possèdent qu'une rigidité axiale. Ces éléments sont connectés à des éléments d'« adhérence » spéciaux développés pour modéliser le comportement de glissement entre une barre d'armature et le béton environnant. Ces éléments d'adhérence sont ensuite connectés par des éléments MPC (contraintes multi-points) au maillage représentant le béton. Cette approche permet le maillage indépendant du ferraillage et du béton, leur interconnexion étant assurée ultérieurement.
Éléments d'adhérence
La longueur d'ancrage est vérifiée en intégrant les contraintes de cisaillement d'adhérence entre les éléments de béton (2D) et les éléments de barre d'armature (1D) dans le modèle par éléments finis. À cette fin, un type d'élément fini d'« adhérence » a été développé.
La définition de l'élément d'adhérence est similaire à celle d'un élément coque (CQUAD4). Il est également défini par 4 nœuds, mais contrairement à une coque, il ne possède une rigidité non nulle qu'en cisaillement entre les deux nœuds supérieurs et les deux nœuds inférieurs. Dans le modèle, les nœuds supérieurs sont connectés aux éléments représentant le ferraillage et les nœuds inférieurs à ceux représentant le béton. Le comportement de cet élément est décrit par la contrainte d'adhérence, τb, en tant que fonction bilinéaire du glissement entre les nœuds supérieurs et inférieurs, δu, voir Fig. 14.

Le module de rigidité élastique de la relation adhérence-glissement, Gb, est défini comme suit :
où :
kg coefficient dépendant de la surface de la barre d'armature (par défaut kg = 0,2)
Ec module d'élasticité du béton (pris égal à Ecm dans le cas de l'EN)
Ø le diamètre de la barre d'armature
Les valeurs de calcul (valeurs factorisées) de la contrainte ultime de cisaillement d'adhérence, fbd, fournies dans les normes de calcul sélectionnées EN 1992-1-1 ou ACI 318-19, sont utilisées pour vérifier la longueur d'ancrage. L'écrouissage de la branche plastique est calculé par défaut comme Gb/105.
Ressort d'ancrage
La mise en œuvre d'extrémités d'ancrage sur les barres d'armature (c'est-à-dire courbures, crochets, boucles…), conformément aux prescriptions des normes de calcul, permet de réduire la longueur d'ancrage de base des barres (lb,net) d'un certain facteur β (désigné ci-après par « coefficient d'ancrage »). La valeur de calcul de la longueur d'ancrage (lb) est alors calculée comme suit :
La réduction prévue de lb,net est équivalente à l'activation de la barre d'armature à son extrémité à un pourcentage de sa capacité maximale donné par le coefficient de réduction d'ancrage, comme illustré à la Fig. 15a.

La réduction de la longueur d'ancrage est intégrée dans le modèle par éléments finis au moyen d'un élément ressort à l'extrémité de la barre (Fig. 15), défini par le modèle constitutif représenté à la Fig. 15b. La force maximale transmise par ce ressort (Fau) est :
où :
β le coefficient d'ancrage basé sur le type d'ancrage,
As la section transversale de la barre d'armature,
fyd la valeur de calcul (valeur factorisée) de la limite d'élasticité du ferraillage.
Les éléments finis sont implémentés en interne, et le modèle d'analyse est généré automatiquement sans nécessiter d'interaction experte de l'utilisateur. Le maillage est une partie importante de ce processus.
Béton
Tous les éléments en béton sont maillés ensemble. Une taille d'élément recommandée est automatiquement calculée par l'application en fonction de la taille et de la forme de la structure, en tenant compte du diamètre de la plus grande barre de ferraillage. De plus, la taille d'élément recommandée garantit qu'un minimum de 4 éléments est généré dans les parties minces de la structure, telles que les poteaux élancés ou les dalles minces, afin d'assurer des résultats fiables dans ces zones. Le nombre maximum d'éléments béton est limité à 5000, mais cette valeur est suffisante pour fournir la taille d'élément recommandée pour la plupart des structures. Les concepteurs peuvent toujours sélectionner une taille d'élément béton définie par l'utilisateur en modifiant le multiplicateur de la taille de maillage par défaut.
Ferraillage
Le ferraillage est divisé en éléments d'une longueur approximativement égale à la taille des éléments béton. Une fois les maillages du ferraillage et du béton générés, ils sont interconnectés par des éléments d'adhérence comme illustré à la Fig. 13.
Plaques d'appui
Les éléments structurels auxiliaires, tels que les plaques d'appui, sont maillés indépendamment. La taille de ces éléments est calculée comme 2/3 de la taille des éléments béton dans la zone d'assemblage. Les nœuds du maillage de la plaque d'appui sont ensuite connectés aux nœuds de bord du maillage béton à l'aide d'éléments de contrainte d'interpolation (RBE3).
Charges et appuis
Les charges surfaciques et les appuis surfaciques sont connectés uniquement au ferraillage, comme illustré à la Fig. 16. Il est donc nécessaire de définir le ferraillage autour d'eux. La connexion à tous les nœuds du ferraillage dans le rayon effectif est assurée par des éléments RBE3 avec un poids égal.
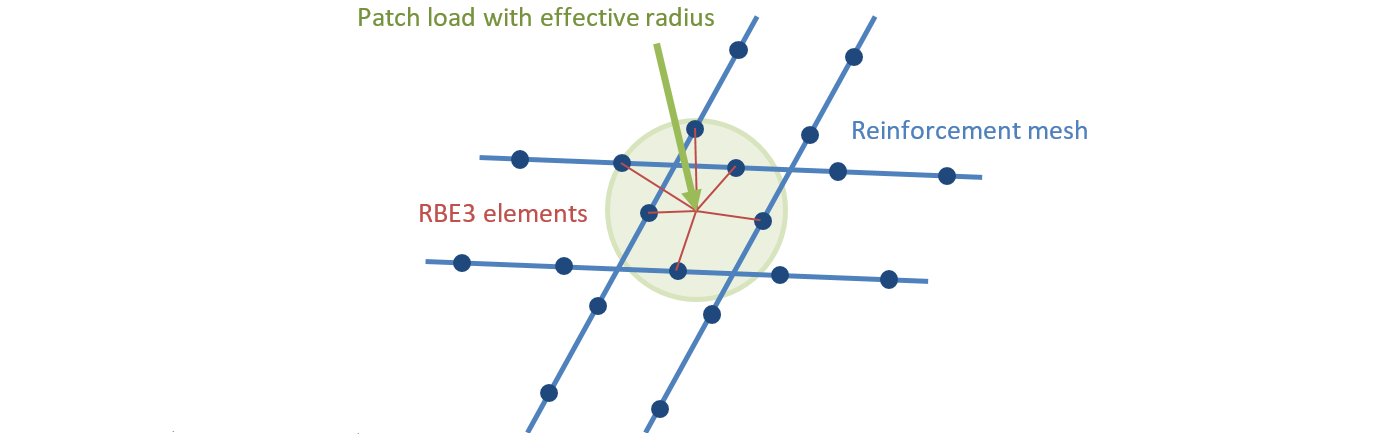
Les appuis linéaires et les charges linéaires sont connectés aux nœuds du maillage béton à l'aide d'éléments RBE3 en fonction de la largeur spécifiée ou du rayon effectif. Le poids des connexions est inversement proportionnel à la distance par rapport à l'appui ou à l'impulsion de charge.
- En savoir plus sur l'interconnexion entre les charges individuelles et le maillage dans Description générale des impulsions de charge dans l'application Detail
Un algorithme standard de Newton-Raphson (NR) complet est utilisé pour trouver la solution à un problème de Méthode des Éléments Finis non linéaire.
En général, l'algorithme NR ne converge pas souvent lorsque la charge totale est appliquée en une seule étape. Une approche habituelle, également utilisée ici, consiste à appliquer la charge de manière séquentielle en plusieurs incréments et à utiliser le résultat de l'incrément de charge précédent pour démarrer la résolution de Newton de l'incrément suivant. À cette fin, un algorithme de contrôle de charge a été implémenté par-dessus le Newton-Raphson. Dans le cas où les itérations NR ne convergent pas, l'incrément de charge actuel est réduit à la moitié de sa valeur, et les itérations NR sont relancées.
Un second objectif de l'algorithme de contrôle de charge est de trouver la charge critique, qui correspond à certains « critères d'arrêt » – plus précisément la déformation maximale dans le béton, le glissement maximal dans les éléments d'adhérence, le déplacement maximal dans les éléments d'ancrage, et la déformation maximale dans les barres de ferraillage. La charge critique est trouvée par la méthode de bissection. Dans le cas où le critère d'arrêt est dépassé en un point quelconque du modèle, les résultats du dernier incrément de charge sont rejetés, et un nouvel incrément de la moitié de la taille du précédent est calculé. Ce processus est répété jusqu'à ce que la charge critique soit trouvée avec une certaine tolérance d'erreur.
Pour le béton, le critère d'arrêt a été fixé à une déformation de 5 % en compression (c'est-à-dire environ un ordre de grandeur supérieur à la déformation de rupture réelle du béton) et de 7 % en traction aux points d'intégration des éléments de coque. En traction, la valeur a été fixée pour permettre d'atteindre en premier la déformation limite dans le ferraillage, qui est généralement d'environ 5 % sans tenir compte du raidissement en traction. En compression, la valeur a été choisie parmi plusieurs alternatives comme étant suffisamment grande pour que les effets de l'écrasement soient visibles dans les résultats, mais suffisamment petite pour ne pas causer trop de problèmes de stabilité numérique.

Pour le ferraillage, le critère d'arrêt est défini en termes de contraintes. Étant donné que les contraintes à la fissure sont modélisées, le critère en traction correspond à la résistance à la traction du ferraillage tenant compte du coefficient de sécurité. La même valeur est utilisée pour le critère en compression.
Le critère d'arrêt dans les éléments d'adhérence et les ressorts d'ancrage est α·δumax, où δumax est le glissement maximal utilisé dans les vérifications normatives et α = 10.
Les résultats sont présentés indépendamment pour le béton et pour les éléments de ferraillage. Les valeurs de contrainte et de déformation dans le béton sont calculées aux points d'intégration des éléments coques. Cependant, comme il n'est pas pratique de présenter les données de cette manière, les résultats sont présentés par défaut aux nœuds, comme la valeur maximale de la contrainte de compression issue des points d'intégration de Gauss adjacents dans les éléments connectés (Fig. 18). Il convient de noter que cette représentation peut localement sous-estimer les résultats aux bords comprimés des éléments dans le cas où la taille des éléments finis est similaire à la profondeur de la zone de compression.

Fig. 18 - Élément fini béton avec points d'intégration et nœuds : présentation des résultats pour le béton aux nœuds et dans les éléments finis.
Les résultats pour les éléments finis de ferraillage sont soit constants pour chaque élément (une valeur – par exemple, pour les contraintes dans l'acier), soit linéaires (deux valeurs – pour les résultats d'adhérence). Pour les éléments auxiliaires, tels que les éléments de plaques d'appui, seules les déformations sont présentées.
3 Vérification du modèle
L'évaluation de la structure à l'aide du CSFM est réalisée par deux analyses différentes : l'une pour les combinaisons de charges à l'état limite de service et l'autre pour les combinaisons à l'état limite ultime. L'analyse à l'état limite de service suppose que le comportement ultime de l'élément est satisfaisant et que les conditions de plastification du matériau ne seront pas atteintes aux niveaux de charge de service. Cette approche permet l'utilisation de modèles constitutifs simplifiés (avec une branche linéaire du diagramme contrainte-déformation du béton) pour l'analyse à l'état limite de service, afin d'améliorer la stabilité numérique et la vitesse de calcul. Il est donc recommandé d'utiliser le processus présenté ci-dessous, dans lequel l'analyse à l'état limite ultime est effectuée en premier.
Analyse à l'état limite ultime
Les différentes vérifications requises par les codes de calcul spécifiques sont évaluées sur la base des résultats directs fournis par le modèle. Les vérifications à l'ELU sont effectuées pour la résistance du béton, la résistance du ferraillage et l'ancrage (contraintes de cisaillement d'adhérence).
Pour s'assurer qu'un élément structurel présente un dimensionnement efficace, il est fortement recommandé d'effectuer une analyse préliminaire tenant compte des étapes suivantes :
- Choisir une sélection des combinaisons de charges les plus critiques.
- Calculer uniquement les combinaisons de charges à l'État Limite Ultime (ELU).
- Utiliser un maillage grossier (en augmentant le multiplicateur de la taille de maillage par défaut dans les Paramètres (Fig. 19)).

Un tel modèle se calculera très rapidement, permettant aux concepteurs de vérifier le ferraillage de l'élément structurel efficacement et de relancer l'analyse jusqu'à ce que toutes les exigences de vérification soient satisfaites pour les combinaisons de charges les plus critiques. Une fois toutes les exigences de vérification de cette analyse préliminaire satisfaites, il est suggéré d'inclure l'ensemble des combinaisons de charges ultimes et d'utiliser une taille de maillage fine (la taille de maillage recommandée par le programme). L'utilisateur peut modifier la taille du maillage par le multiplicateur, qui peut prendre des valeurs de 0,5 à 5 (Fig. 19).
Les résultats et vérifications de base (contrainte, déformation et taux de travail (c'est-à-dire la valeur calculée/valeur limite issue du code), ainsi que la direction des contraintes principales dans le cas des éléments en béton) sont affichés au moyen de différents tracés où la compression est généralement représentée en rouge et la traction en bleu. Les valeurs minimales et maximales globales pour l'ensemble de la structure peuvent être mises en évidence, ainsi que les valeurs minimales et maximales pour chaque partie définie par l'utilisateur. Dans un onglet séparé du programme, des résultats avancés tels que les valeurs tensorielles, les déformations de la structure et les taux de ferraillage (effectifs et géométriques) utilisés pour le calcul du raidissement en traction des barres de ferraillage peuvent être affichés. De plus, les charges et réactions pour les combinaisons ou cas de charge sélectionnés peuvent être présentés.
Analyse à l'état limite de service
Les vérifications à l'ELS sont effectuées pour la limitation des contraintes, la largeur des fissures et les limites de déflexion. Les contraintes sont vérifiées dans les éléments en béton et en ferraillage conformément au code applicable, de manière similaire à celle spécifiée pour l'ELU.
L'analyse à l'état limite de service contient certaines simplifications des modèles constitutifs utilisés pour l'analyse à l'état limite ultime. Une adhérence parfaite est supposée, c'est-à-dire que la longueur d'ancrage n'est pas vérifiée à l'état limite de service. De plus, la branche plastique de la courbe contrainte-déformation du béton en compression est ignorée, tandis que la branche élastique est linéaire et infinie. Ces simplifications améliorent la stabilité numérique et la vitesse de calcul, et ne réduisent pas la généralité de la solution tant que les limites de contrainte des matériaux résultantes à l'état limite de service sont clairement inférieures à leurs points de plastification (comme requis par les normes). Par conséquent, les modèles simplifiés utilisés pour l'état limite de service ne sont valides que si toutes les exigences de vérification sont satisfaites.
Calcul de la largeur des fissures
Il existe deux méthodes de calcul des largeurs de fissures : la fissuration stabilisée et la fissuration non stabilisée. En fonction du taux de ferraillage géométrique dans chaque partie de la structure, le type de modèle de calcul des fissures est déterminé (TCM pour la fissuration stabilisée et POM pour le modèle de fissuration non stabilisée).

Alors que le CSFM fournit un résultat direct pour la plupart des vérifications (par exemple, la capacité de l'élément, les flèches…), les résultats de largeur de fissures sont calculés à partir des résultats de déformation du ferraillage directement fournis par l'analyse par éléments finis, selon la méthodologie décrite à la Fig. 20. Une cinématique de fissure sans glissement (ouverture pure de fissure) est considérée (Fig. 20a), ce qui est cohérent avec les hypothèses principales du modèle. Les directions principales des contraintes et des déformations définissent l'inclinaison des fissures (θr = θs= θe). D'après (Fig. 20b), la largeur de fissure (w) peut être projetée dans la direction de la barre de ferraillage (wb), ce qui conduit à :
où θb est l'inclinaison de la barre.
Veuillez noter que le programme affiche des valeurs de θr et θb < π/2. Cela signifie que l'équation précédente s'applique aux cas où le ferraillage et la fissure traversent des quadrants différents du système de coordonnées cartésiennes, comme illustré à la Fig. 20, où le ferraillage traverse les quadrants I et III et la fissure les quadrants II et IV. Pour les cas où le ferraillage et la fissure traversent les mêmes quadrants, l'équation doit être modifiée comme suit :
La composante wb est calculée de manière cohérente à partir des modèles de raidissement en traction en intégrant les déformations du ferraillage. Pour les zones présentant des schémas de fissuration pleinement développés, les déformations moyennes calculées (em) le long des barres de ferraillage sont directement intégrées sur l'espacement des fissures (sr), comme indiqué à la (Fig. 20c). Bien que cette approche du calcul des directions de fissures ne corresponde pas à la position réelle des fissures, elle fournit néanmoins des valeurs représentatives conduisant à des résultats de largeur de fissures comparables aux valeurs de largeur de fissures requises par les normes à la position de la barre de ferraillage.
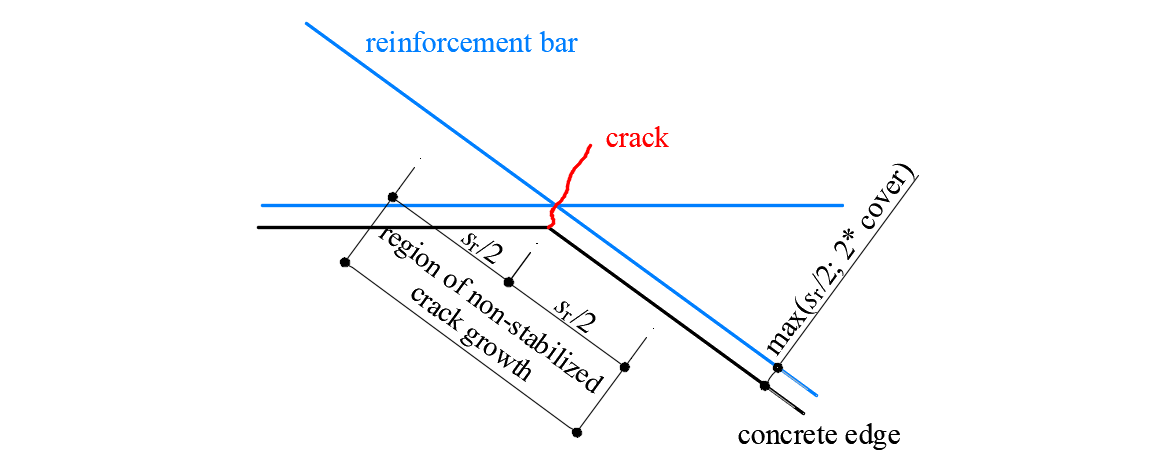
Des situations particulières sont observées aux angles rentrants de la structure calculée. Dans ce cas, l'angle prédéfinit la position d'une fissure unique qui se comporte de manière non stabilisée avant que des fissures adjacentes supplémentaires ne se développent. Ces fissures supplémentaires se développent généralement après le domaine de service (Mata-Falcón 2015), ce qui justifie le calcul des largeurs de fissures dans cette zone comme si elles étaient non stabilisées (Fig. 21).
Raidissement en traction
La mise en œuvre du raidissement en traction distingue les cas de schémas de fissuration stabilisée et non stabilisée. Dans les deux cas, le béton est considéré par défaut comme entièrement fissuré avant chargement.

Fissuration stabilisée
Pour les schémas de fissuration pleinement développés, le raidissement en traction est introduit à l'aide du Modèle de Tirant en Traction (TCM) (Marti et al. 1998 ; Alvarez 1998) – Fig. 22a – dont il a été démontré qu'il fournit d'excellentes prédictions de réponse malgré sa simplicité (Burns 2012). Le TCM suppose une relation contrainte de cisaillement d'adhérence-glissement étagée, rigide-parfaitement plastique avec τb = τb0 =2 fctm pour σs ≤ fy et τb =τb1 = fctm pour σs > fy. En traitant chaque barre de ferraillage comme un tirant en traction – Fig. 22b et Fig. 22a – la distribution des contraintes de cisaillement d'adhérence, des contraintes dans l'acier et dans le béton, et donc la distribution des déformations entre deux fissures peut être déterminée pour toute valeur donnée des contraintes maximales dans l'acier (ou des déformations) aux fissures.
Pour sr = sr0, une nouvelle fissure peut ou non se former car au centre entre deux fissures σc1 = fct. Par conséquent, l'espacement des fissures peut varier d'un facteur deux, c'est-à-dire sr = λsr0, avec l = 0,5…1,0. En supposant une certaine valeur de λ, la déformation moyenne du tirant (εm) peut être exprimée en fonction des contraintes maximales dans le ferraillage (c'est-à-dire les contraintes aux fissures, σsr). Pour le diagramme contrainte-déformation bilinéaire idéalisé des barres nues considéré par défaut dans le CSFM, les expressions analytiques fermées suivantes sont obtenues (Marti et al. 1998) :
où :
Esh le module d'écrouissage de l'acier Esh = (ft – fy)/(εu – fy /Es) ,
Es module d'élasticité du ferraillage,
Ø diamètre de la barre de ferraillage,
sr espacement des fissures,
σsr contraintes dans le ferraillage aux fissures,
σs contraintes réelles dans le ferraillage,
fy limite d'élasticité du ferraillage.
La mise en œuvre du CSFM dans IDEA StatiCa Detail considère par défaut l'espacement moyen des fissures lors de l'analyse du champ de contraintes assistée par ordinateur. L'espacement moyen des fissures est considéré comme égal à 2/3 de l'espacement maximal des fissures (λ = 0,67), conformément aux recommandations formulées sur la base d'essais de flexion et de traction (Broms 1965 ; Beeby 1979 ; Meier 1983). Il convient de noter que les calculs de largeur de fissures considèrent un espacement maximal des fissures (λ = 1,0) afin d'obtenir des valeurs conservatives.
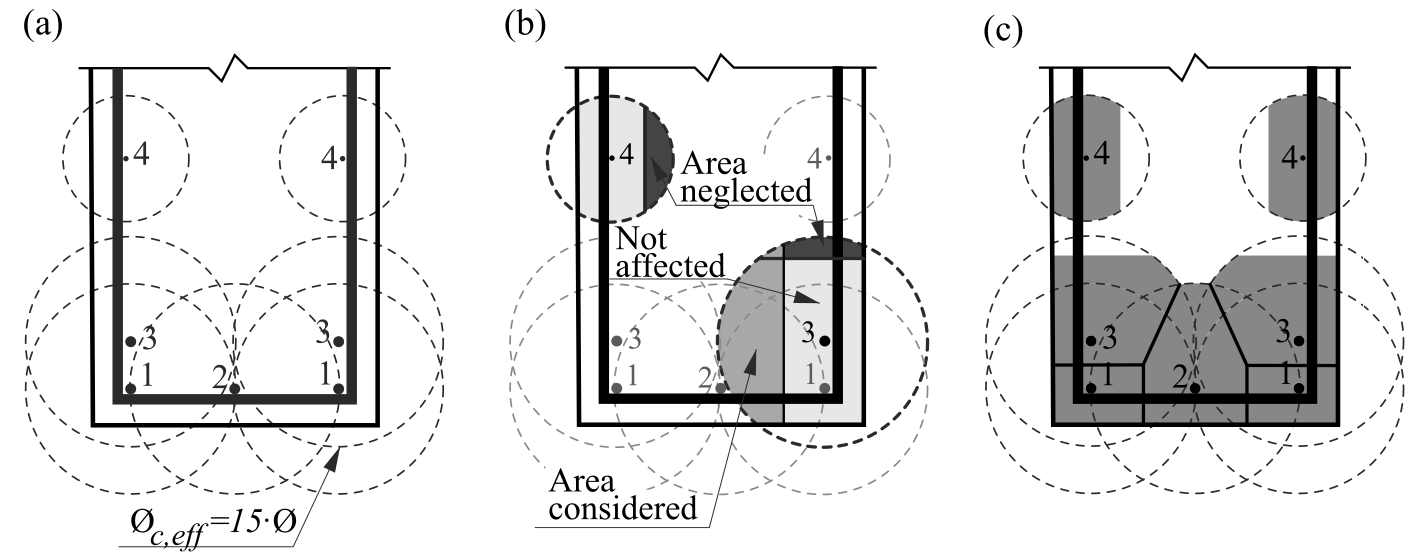
L'application du TCM dépend du taux de ferraillage, et donc l'attribution d'une aire de béton appropriée travaillant en traction entre les fissures à chaque barre de ferraillage est cruciale. Une procédure numérique automatique a été développée pour définir le taux de ferraillage effectif correspondant (ρeff = As/Ac,eff) pour toute configuration, y compris le ferraillage incliné (Fig. 23).
Fissuration non stabilisée
Les fissures présentes dans les zones dont le taux de ferraillage géométrique est inférieur à ρcr, c'est-à-dire la quantité minimale de ferraillage pour laquelle le ferraillage est capable de reprendre la charge de fissuration sans plastification, sont générées soit par des actions non mécaniques (par exemple le retrait), soit par la propagation de fissures contrôlées par d'autres ferraillages. La valeur de ce ferraillage minimal est obtenue comme suit :
où :
fy limite d'élasticité du ferraillage,
fct résistance à la traction du béton,
n rapport d'équivalence, n = Es / Ec .
Pour le béton et l'acier de ferraillage courants, ρcr est d'environ 0,6 %.
Pour les étriers dont le taux de ferraillage est inférieur à ρcr, la fissuration est considérée comme non stabilisée et le raidissement en traction est mis en œuvre au moyen du Modèle d'Arrachement (POM) décrit à la Fig. 22b. Ce modèle analyse le comportement d'une fissure unique en ne considérant aucune interaction mécanique entre les fissures séparées, en négligeant la déformabilité du béton en traction et en supposant la même relation contrainte de cisaillement d'adhérence-glissement étagée, rigide-parfaitement plastique utilisée par le TCM. Cela permet d'obtenir la distribution des déformations du ferraillage (εs) au voisinage de la fissure pour toute contrainte maximale dans l'acier à la fissure (σsr) directement par équilibre. Étant donné que l'espacement des fissures est inconnu pour un schéma de fissuration non pleinement développé, la déformation moyenne (εm) est calculée pour tout niveau de charge sur la distance entre les points à glissement nul lorsque la barre de ferraillage atteint sa résistance à la traction (ft) à la fissure (lε,avg à la Fig. 22b), conduisant aux relations suivantes :

Les modèles proposés permettent le calcul du comportement du ferraillage adhérent, qui est finalement pris en compte dans l'analyse. Ce comportement (incluant le raidissement en traction) pour l'acier de ferraillage européen le plus courant (B500B, avec ft / fy = 1,08 et εu = 5 %) est illustré aux Fig. 22c-d.
4 Vérifications structurelles selon l'Eurocode
L'évaluation de la structure à l'aide du CSFM est réalisée par deux analyses distinctes : l'une pour les combinaisons de charges à l'ELS, et l'autre pour les combinaisons de charges à l'ELU. L'analyse à l'ELS suppose que le comportement ultime de l'élément est satisfaisant et que les conditions de plastification du matériau ne seront pas atteintes aux niveaux de charge de service. Cette approche permet l'utilisation de modèles constitutifs simplifiés (avec une branche linéaire du diagramme contrainte-déformation du béton) pour l'analyse à l'ELS, afin d'améliorer la stabilité numérique et la vitesse de calcul.
Béton - ELU
Le modèle de béton implémenté dans le CSFM est basé sur les lois de comportement uniaxiales en compression prescrites par l'EN 1992-1-1 pour le calcul des sections transversales, qui ne dépendent que de la résistance à la compression. Le diagramme parabole-rectangle spécifié dans l'EN 1992-1-1 Art. 3.1.7 (1) (Fig. 24a) est utilisé par défaut dans le CSFM, mais les concepteurs peuvent également choisir une relation élastique-plastique parfaite plus simplifiée conformément à l'EN 1992-1-1 Art. 3.1.7 (2) (Fig. 24b). La résistance à la traction est négligée, comme c'est le cas dans le calcul classique du béton armé.

L'implémentation du CSFM dans IDEA StatiCa Detail ne considère pas de critère de rupture explicite en termes de déformations pour le béton en compression (c'est-à-dire qu'après l'atteinte de la contrainte maximale, elle considère une branche plastique avec εcu2 (εcu3) à une valeur de 5 % alors que l'EN 1992-1-1 suppose une déformation ultime inférieure à 0,35 %). Cette simplification ne permet pas de vérifier la capacité de déformation des structures dont la rupture se produit en compression. Cependant, leur capacité ultime fcd selon l'EN 1992-1-1 3.1.3 est correctement prédite lorsque, en plus du facteur de béton fissuré (kc2 défini à la (Fig. 25)), l'augmentation de la fragilité du béton avec l'accroissement de sa résistance est prise en compte au moyen du facteur de réduction défini dans le fib Model Code 2010 comme suit :
où :
αcc est le coefficient tenant compte des effets à long terme sur la résistance à la compression et des effets défavorables résultant du mode d'application de la charge. Il est conforme à l'EN 1992-1-1 Art. 3.1.6 (1). La valeur par défaut est 1,0.
kc est le facteur de réduction global de la résistance à la compression
kc2 est le facteur de réduction dû à la présence de fissuration transversale
fck est la résistance caractéristique sur cylindre du béton (en MPa pour la définition de ).

Béton - ELS
L'analyse de l'état limite de service contient certaines simplifications des modèles de comportement utilisés pour l'analyse à l'état limite ultime. La branche plastique de la courbe contrainte-déformation du béton en compression est ignorée, tandis que la branche élastique est linéaire et infinie. La loi d'adoucissement en compression n'est pas prise en compte. Ces simplifications améliorent la stabilité numérique et la vitesse de calcul et ne réduisent pas la généralité de la solution tant que les limites de contrainte des matériaux résultantes à l'état limite de service sont clairement inférieures à leurs points de plastification (comme l'exige l'Eurocode). Par conséquent, les modèles simplifiés utilisés pour l'état limite de service ne sont valables que si toutes les exigences de vérification sont satisfaites.
Effets à long terme
Dans l'analyse à l'état limite de service, les effets à long terme du béton sont pris en compte en utilisant un coefficient de fluage effectif infini (, pris par défaut à une valeur de 2,5) qui modifie le module de déformation sécant du béton (Ecm) conformément à l'EN 1992-1-1, section 3.1.4 (3) resp. 7.4.3 (5) comme suit :
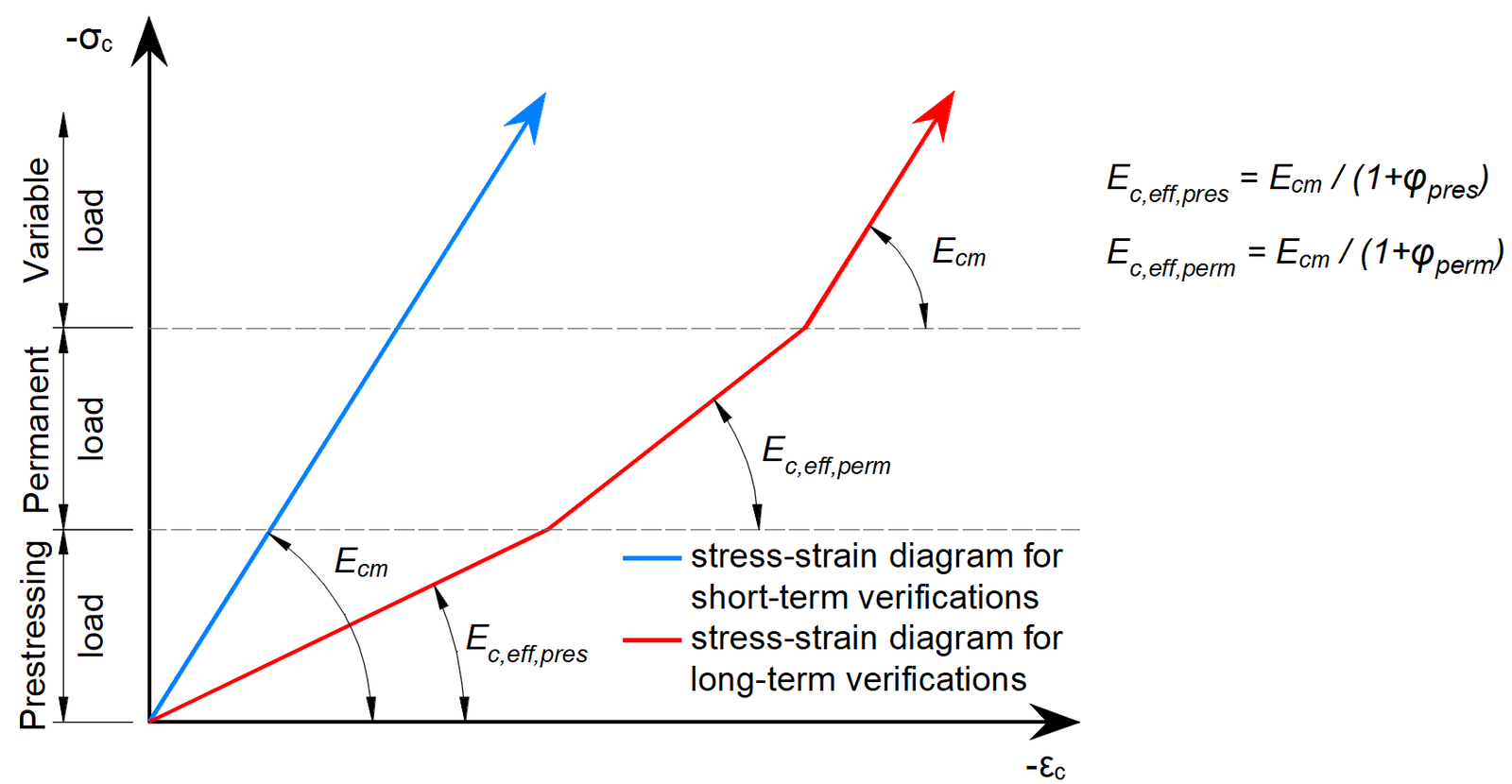
Lors de la prise en compte des effets à long terme, un pas de charge avec toutes les charges permanentes est d'abord calculé en tenant compte du coefficient de fluage (c'est-à-dire en utilisant le module de déformation effectif du béton, Ec,eff), puis les charges supplémentaires sont calculées sans le coefficient de fluage (c'est-à-dire en utilisant Ecm). De plus, pour effectuer les vérifications à court terme, un autre calcul est réalisé dans lequel toutes les charges sont calculées sans le coefficient de fluage. Les deux calculs pour les vérifications à long et à court terme sont représentés à la Fig. 26.
Les coefficients de fluage sont définis par l'utilisateur dans les propriétés des matériaux et doivent être calculés conformément à l'EN 1992-1-1, Fig. 3.1.
Ferraillage
Par défaut, le diagramme contrainte-déformation bilinéaire idéalisé pour les barres d'armature nues défini dans l'EN 1992-1-1, section 3.2.7 (Fig. 27) est pris en compte. La définition de ce diagramme ne nécessite que la connaissance des propriétés de base du ferraillage lors de la phase de conception (résistance et classe de ductilité). Lorsqu'elles sont connues, la relation contrainte-déformation réelle du ferraillage (laminé à chaud, écroui à froid, trempé et auto-revenu, …) peut être prise en compte. Le diagramme contrainte-déformation du ferraillage peut être défini par l'utilisateur, mais dans ce cas, il est impossible de supposer l'effet de raidissement en traction (il est impossible de calculer la largeur des fissures). L'utilisation du diagramme contrainte-déformation avec une branche supérieure horizontale ne permet pas la vérification de la durabilité structurelle. Par conséquent, une vérification manuelle des exigences de ductilité normatives est nécessaire.

Le raidissement en traction (Fig. 28) est pris en compte automatiquement en modifiant la relation contrainte-déformation d'entrée de la barre d'armature nue afin de capturer la rigidité moyenne des barres noyées dans le béton (εm).

La Méthode du Champ de Contraintes Compatible est conforme aux codes de calcul modernes. Étant donné que les modèles de calcul n'utilisent que des propriétés matérielles standard, le format des facteurs de sécurité partiels prescrit dans les codes de calcul peut être appliqué sans aucune adaptation. Ainsi, les charges appliquées sont pondérées et les propriétés caractéristiques des matériaux sont réduites à l'aide des coefficients de sécurité respectifs prescrits dans les codes de calcul, exactement comme dans l'analyse conventionnelle du béton. Les valeurs des facteurs de sécurité des matériaux prescrits dans l'EN 1992-1-1 chap. 2.4.2.4 sont définies par défaut, mais l'utilisateur peut modifier les facteurs de sécurité dans les paramètres de code et de calcul (Fig. 29).

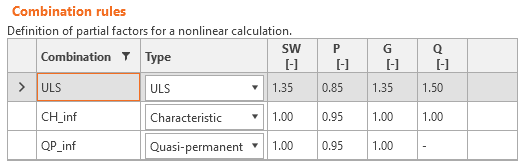
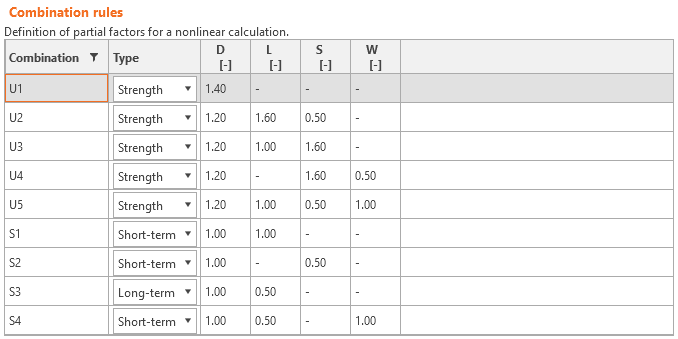
Les facteurs de sécurité des charges doivent être définis par l'utilisateur dans les règles de combinaison pour chaque combinaison non linéaire de cas de charge (Fig. 30). Pour tous les modèles implémentés dans Idea StatiCa Detail, les facteurs de sécurité partiels sont déjà prédéfinis.
En utilisant des combinaisons de facteurs de sécurité partiels définies par l'utilisateur, les utilisateurs peuvent également effectuer des calculs avec le CSFM en utilisant la méthode du facteur de résistance global (Navrátil, et al. 2017), mais cette approche est rarement utilisée dans la pratique de conception. Certaines directives recommandent d'utiliser la méthode du facteur de résistance global pour l'analyse non linéaire. Cependant, dans les analyses non linéaires simplifiées (telles que le CSFM), qui ne nécessitent que les propriétés des matériaux utilisées dans les calculs manuels conventionnels, il est encore plus souhaitable d'utiliser le format des facteurs de sécurité partiels.
Les différentes vérifications requises par EN 1992-1-1 sont évaluées sur la base des résultats directs fournis par le modèle. Les vérifications à l'ELU sont effectuées pour la résistance du béton, la résistance du ferraillage et l'ancrage (contraintes de cisaillement d'adhérence).
La résistance du béton en compression est évaluée comme le rapport entre la contrainte principale maximale de compression σc = σc2 obtenue par l'analyse par éléments finis et la valeur limite σc,lim = fcd.
La résistance du ferraillage est évaluée en traction et en compression comme le rapport entre la contrainte dans le ferraillage aux fissures σsr et la valeur limite spécifiée σs,lim :
où :
fyk limite d'élasticité du ferraillage selon EN 1992-1-1 Art. 3.2.3,
k le rapport de la résistance en traction ftk à la limite d'élasticité,
γs est le coefficient partiel de sécurité pour le ferraillage
La contrainte de cisaillement d'adhérence est évaluée indépendamment comme le rapport entre la contrainte d'adhérence τb calculée par l'analyse par éléments finis et la résistance ultime d'adhérence fbd, selon EN 1992-1-1 chap. 8.4.2 :
où :
fctd est la valeur de calcul de la résistance en traction du béton selon EN 1992-1-1 Art. 3.1.6 (2). En raison de la fragilité croissante des bétons de résistance élevée, fctk,0.05 est limitée à la valeur pour C60/75 selon EN 1992-1-1 Art. 8.4.2 (2)
η1 est un coefficient lié à la qualité des conditions d'adhérence et à la position de la barre lors du bétonnage (Fig. 31).
η1 = 1,0 lorsque de « bonnes » conditions sont obtenues et
η1 = 0,7 pour tous les autres cas et pour les barres dans des éléments structurels construits avec des coffrages glissants, sauf s'il peut être démontré que de « bonnes » conditions d'adhérence existent
η2 est lié au diamètre de la barre :
η2 = 1,0 pour Ø ≤ 32 mm
η2 = (132 - Ø)/100 pour Ø > 32 mm

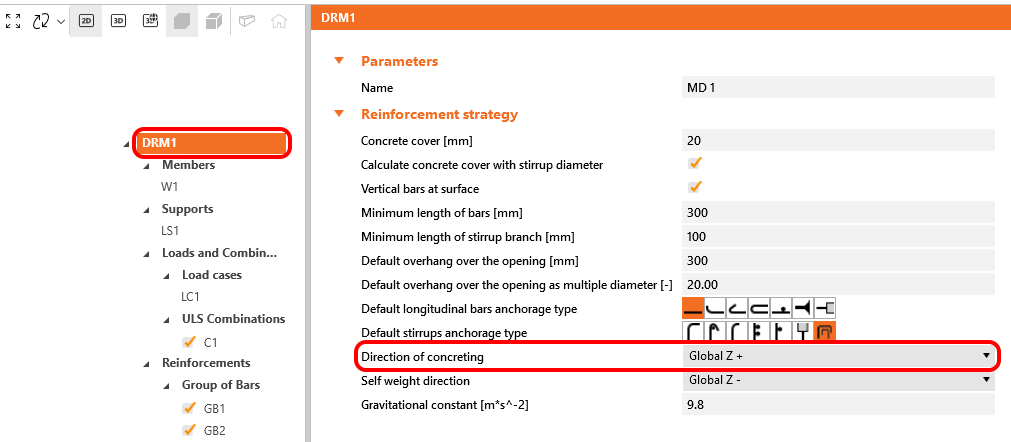
Dans IDEA StatiCa Detail, les conditions d'adhérence sont prises en compte conformément à la Fig. 31 c) et d). La direction du bétonnage peut être définie dans l'application pour chaque élément de projet comme suit.
Ces vérifications sont effectuées par rapport aux valeurs limites appropriées pour les parties respectives de la structure (c'est-à-dire que, malgré une classe unique pour le béton et le ferraillage, les diagrammes contrainte-déformation finaux différeront dans chaque partie de la structure en raison des effets de raidissement en traction et d'adoucissement en compression).
Il existe également une option pour modéliser des armatures lisses. Plus d'informations peuvent être trouvées ici : Armatures lisses dans Detail
Force totale Ftot et force limite Flim
La force totale Ftot est un résultat de l'analyse par éléments finis et peut être définie de deux manières.
où As est l'aire de la barre de ferraillage et σs est la contrainte dans la barre.
Ou comme la somme de la force d'ancrage Fa et de la force d'adhérence Fbond.
où Fa est la force réelle dans le ressort d'ancrage et Fbond est la force d'adhérence qui peut être obtenue en intégrant la contrainte d'adhérence τb sur la longueur de la barre de ferraillage l.
Cs est le périmètre de la barre de ferraillage.
La force limite Flim est la force maximale dans l'élément de la barre en tenant compte de la résistance ultime de la barre ainsi que des conditions d'ancrage (adhérence entre le béton et le ferraillage, crochets d'ancrage, boucles, etc.).
où Cs est le périmètre de la barre de ferraillage et l est la longueur depuis le début de la barre jusqu'au point d'intérêt.
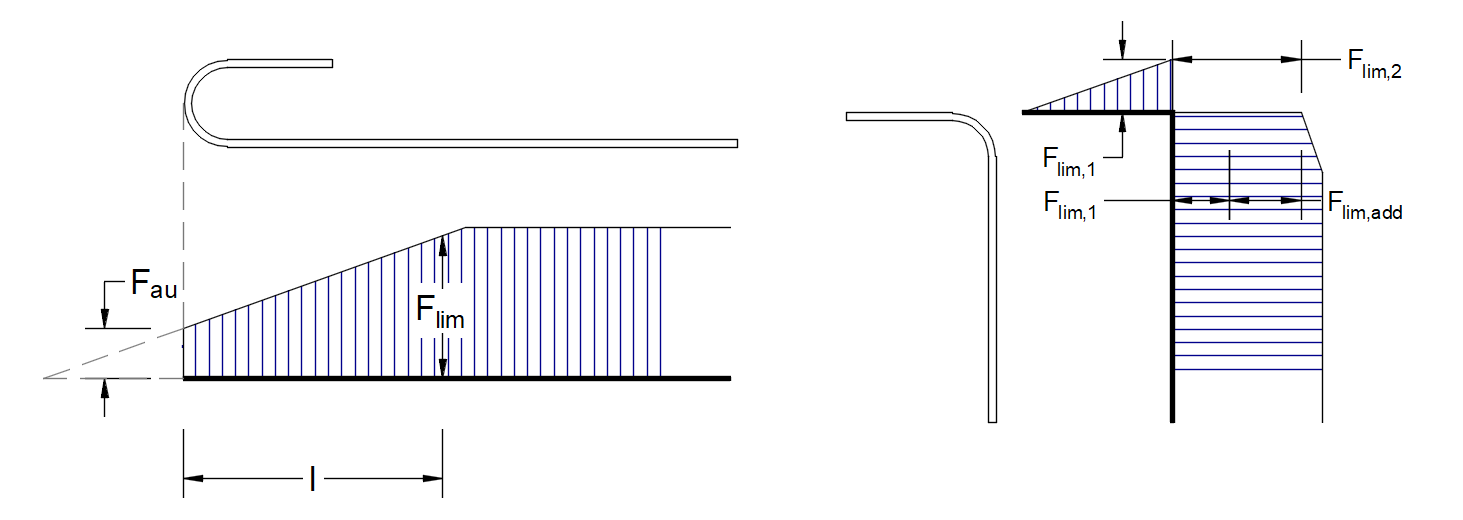
où Flim,add est la force additionnelle calculée à partir de l'amplitude de l'angle entre les éléments voisins. Flim,2 doit toujours être inférieure à Fu.
Les types d'ancrage disponibles dans le CSFM comprennent une barre droite (c'est-à-dire sans réduction d'extrémité d'ancrage), un coude, un crochet, une boucle, une barre transversale soudée, une adhérence parfaite et une barre continue. Tous ces types, ainsi que les coefficients d'ancrage β respectifs, sont présentés en Fig. 32 pour le ferraillage longitudinal et en Fig. 33 pour les étriers. Les valeurs des coefficients d'ancrage adoptés sont conformes à EN 1992-1-1 section 8.4.4 Tab. 8.2. Il convient de noter que malgré les différentes options disponibles, le CSFM distingue trois types d'extrémités d'ancrage : (i) aucune réduction de la longueur d'ancrage, (ii) une réduction de 30 % de la longueur d'ancrage dans le cas d'un ancrage normalisé et (iii) une adhérence parfaite.


Afin de se conformer à EN 1992-1-1, le ressort d'ancrage doit être utilisé dans le calcul ; le ressort d'ancrage est modifié par le coefficient β, de sorte que l'utilisateur doit utiliser l'un des types d'ancrage disponibles lors de la définition des conditions de début et de fin du ferraillage.
Lors de la conception de structures en béton, nous rencontrons deux grands groupes d'aires partiellement chargées (APC) - le premier comprend les appareils d'appui, tandis que le second concerne les zones d'ancrage. Selon les normes actuellement en vigueur pour la conception des structures en béton armé EN 1992-1-1 chap. 6.7 (Fig. 34), l'écrasement local du béton et les efforts de traction transversaux doivent être pris en compte pour les aires partiellement chargées. Pour une charge uniformément répartie sur une aire, Ac0, la capacité en compression du béton peut être augmentée jusqu'à trois fois en fonction de l'aire de distribution de calcul Ac1.

L'aire partiellement chargée doit être suffisamment ferraillée avec un ferraillage transversal conçu pour transmettre les efforts d'éclatement qui se produisent dans la zone. Pour le dimensionnement du ferraillage transversal dans les aires partiellement chargées, la méthode Bielle-et-tirant est utilisée conformément à l'Eurocode. Sans le ferraillage transversal requis, il n'est pas possible d'envisager une augmentation de la capacité en compression du béton.
Aires partiellement chargées dans le CSFM

En utilisant le CSFM, il est possible de dimensionner et d'évaluer des structures en béton armé tout en incluant l'influence de l'augmentation de la résistance en compression du béton dans les aires partiellement chargées. Étant donné que le CSFM est un modèle de voile (2D) et que les aires partiellement chargées constituent une tâche spatiale (3D), il a été nécessaire de trouver une solution combinant ces deux types de tâches différents (Fig. 35). Si la fonction « aires partiellement chargées » est activée, la géométrie du cône admissible est créée conformément à l'Eurocode (Fig. 34). Toutes les collisions géométriques sont résolues entièrement en 3D pour la géométrie de l'élément en béton spécifiée et les dimensions de chaque APC. Par la suite, un modèle de calcul de l'aire partiellement chargée est créé.
La modification du modèle de matériau s'est avérée être une approche inadaptée, principalement parce que la projection des propriétés sur le maillage d'éléments finis est problématique. Il a été déterminé qu'une approche indépendante du maillage d'éléments finis constitue une solution plus appropriée. Des bielles fictives parfaitement cohérentes sont créées pour la géométrie connue du cône de compression (Fig. 35 et Fig. 37). Ces bielles ont des propriétés matérielles identiques à celles du béton utilisé dans le modèle, y compris le diagramme contrainte-déformation. La forme du cône détermine la direction des bielles, qui répartissent progressivement la charge de l'APC vers l'aire de distribution de calcul. La densité surfacique des bielles fictives est variable à chaque partie du cône, et elle ajoute une aire fictive de béton dans la direction de la charge. Au niveau de l'aire chargée (Ac0), une aire fictive de béton est ajoutée selon le rapport (où Areal est l'aire de l'appui prise en compte dans le modèle de calcul 2D), et cette aire diminue linéairement jusqu'à zéro vers l'aire de distribution de calcul (Ac1). Cette solution garantit que la contrainte de compression dans le béton est constante sur l'ensemble du volume du cône.

La résistance de l'aire partiellement chargée est augmentée selon le rapport entre l'aire de distribution de calcul et l'aire chargée, conformément à EN 1992-1-1 (6.7). Il convient de rappeler qu'il s'agit d'un modèle de calcul qui ne peut pas décrire précisément l'état de contrainte sur une aire partiellement chargée dont le flux réel est bien plus complexe. Cependant, cette solution permet une distribution correcte de la charge sur l'ensemble du modèle tout en respectant la capacité portante accrue de l'aire partiellement chargée. De plus, elle introduit correctement les contraintes transversales dans cette zone.
Lors de l'utilisation de la fonctionnalité des aires partiellement chargées pour simuler l'augmentation de la capacité en compression du béton, il est nécessaire d'effectuer la vérification normative séparément conformément à EN 1992-1-1, section 6.7 (2). Les efforts de traction transversaux (efforts de fendage) repris par le ferraillage sont vérifiés automatiquement.
Les vérifications à l'ELS sont effectuées pour la limitation des contraintes, la largeur des fissures et les limites de déflexion. Les contraintes sont vérifiées dans les éléments en béton et en ferraillage conformément à l'EN 1992-1-1, de manière similaire à celle spécifiée pour l'ELU.
Limitation des contraintes
La contrainte de compression dans le béton doit être limitée afin d'éviter les fissures longitudinales. Conformément à l'EN 1992-1-1 chap. 7.2 (2), des fissures longitudinales peuvent apparaître si le niveau de contrainte sous la combinaison caractéristique des charges dépasse une valeur k1fck. La contrainte de compression dans le béton est évaluée comme le rapport entre la contrainte principale maximale de compression σc = σc2 obtenue par l'analyse par éléments finis pour les états limites de service et la valeur limite σc,lim. Ainsi :
où :
fck résistance caractéristique sur cylindre du béton,
k1 =0,6.
Si la contrainte dans le béton sous les charges quasi-permanentes est inférieure à k2fck conformément à l'EN 1992-1-1 Art. 7.2(3), le fluage linéaire peut être supposé. Si la contrainte dans le béton dépasse k2fck, le fluage non linéaire doit être pris en compte (voir EN 1992-1-1 Art. 3.1.4). Dans IDEA StatiCa Detail, seul le fluage linéaire conformément à l'EN 1992-1-1 Art. 3.1.4 (3) peut être supposé (voir Modèles de matériaux (EN)).
Une fissuration ou une déformation inacceptable peut être supposée évitée si, sous la combinaison caractéristique des charges, la contrainte de traction dans le ferraillage ne dépasse pas k3fyk (EN 1992-1-1 chap. 7.2 (5)). La résistance du ferraillage est évaluée comme le rapport entre la contrainte dans le ferraillage aux fissures σs = σsr et la valeur limite spécifiée σs,lim :
où :
fyk limite d'élasticité du ferraillage,
k3 =0,8.
Déflexion
Les déflexions ne peuvent être évaluées que pour les voiles ou les poutres isostatiques (statiquement déterminées) ou hyperstatiques (statiquement indéterminées). Dans ces cas, la valeur absolue des déflexions est prise en compte (par rapport à l'état initial avant chargement), et la valeur maximale admissible des déflexions doit être définie par l'utilisateur. Les déflexions aux extrémités réduites ne peuvent pas être vérifiées car il s'agit essentiellement de structures instables où l'équilibre est satisfait par l'ajout de forces aux extrémités, et donc les déflexions ne sont pas réalistes. La déflexion à court terme uz,st ou à long terme uz,lt peut être calculée et vérifiée par rapport aux valeurs limites définies par l'utilisateur :
où :
uz déflexion à court ou long terme calculée par l'analyse par éléments finis,
uz,lim valeur limite de la déflexion définie par l'utilisateur.
Largeur de fissure
Les largeurs et orientations des fissures sont calculées uniquement pour les effets à long terme (en utilisant Ec,eff) pour les combinaisons dans lesquelles l'évaluation de la largeur des fissures est activée. Les vérifications basées sur les valeurs limites définies par l'utilisateur conformément à l'Eurocode sont présentées comme suit :
où :
w largeur de fissure calculée par l'analyse par éléments finis,
wlim valeur limite de la largeur de fissure définie par l'utilisateur.
Il existe deux méthodes de calcul des largeurs de fissures (fissuration stabilisée et non stabilisée). Dans le cas général (fissuration stabilisée), la largeur de fissure est calculée en intégrant les déformations sur les éléments 1D des barres de ferraillage. La direction de la fissure est ensuite calculée à partir des trois points d'intégration les plus proches (du centre de l'élément fini 1D de ferraillage considéré) des éléments 2D en béton. Bien que cette approche du calcul des directions de fissures ne corresponde pas à la position réelle des fissures, elle fournit néanmoins des valeurs représentatives conduisant à des résultats de largeur de fissures comparables aux valeurs de largeur de fissures requises par la norme à la position de la barre de ferraillage.
5 Vérifications structurelles selon ACI 318-19
L'évaluation de la structure à l'aide du CSFM est réalisée par deux analyses distinctes : l'une pour les combinaisons de charges à l'ELS, et l'autre pour les combinaisons de charges de résistance. L'analyse à l'ELS suppose que le comportement sous charges factorisées est satisfaisant et que les conditions de plastification du matériau ne seront pas atteintes aux niveaux de charge de service. Cette approche permet l'utilisation de modèles constitutifs simplifiés (avec une branche linéaire du diagramme contrainte-déformation du béton) pour l'analyse à l'ELS, afin d'améliorer la stabilité numérique et la vitesse de calcul.
Le CSFM est conforme à ACI 318-19, chapitre 6.8.1.1. Afin que le CSFM satisfasse aux exigences de la section 6.8.1.2 de l'ACI 318-19, de nombreux essais de vérification ont été réalisés dans diverses universités. Des articles individuels résumant les résultats de vérification et de validation sont disponibles au lien suivant.
Béton - Résistance
Le modèle de béton implémenté pour les calculs de résistance dans le CSFM est basé sur la courbe contrainte-déformation parabolique-plastique du béton, fondée sur la courbe parabolique contrainte-déformation de la Portland Cement Association décrite dans les Notes de la PCA sur les exigences du Code de construction ACI 318-99 pour le béton structurel, Figure 6-8. La résistance à la traction est négligée, comme c'est le cas dans la conception classique du béton armé.
L'implémentation du CSFM dans IDEA StatiCa Detail ne considère pas de critère de rupture explicite en termes de déformations pour le béton en compression (c'est-à-dire qu'après l'atteinte de la contrainte maximale, elle considère une branche plastique avec εc0 à une valeur maximale de 5 %, tandis que l'ACI 318-19 Cl. 22.2.2.1 suppose une déformation ultime inférieure à 0,3 %). Cette simplification ne permet pas de vérifier la capacité de déformation des structures dont la rupture se produit en compression. Cependant, la résistance est correctement prédite lorsque, en plus du facteur de béton fissuré (kc2 défini à la (Fig. 39)), l'augmentation de la fragilité du béton avec l'accroissement de sa résistance est prise en compte au moyen du facteur de réduction défini dans le fib Model Code 2010 comme suit :
où :
α1 est le facteur de réduction de la résistance à la compression du béton défini dans l'ACI 318-19 Cl. 22.2.2.4.1. Lors de l'utilisation d'un diagramme contrainte-déformation parabolique-rectangulaire, il est nécessaire de réduire la contrainte de compression maximale par ce facteur. Cela permet de moyenner la distribution des contraintes dans la zone comprimée de telle sorte que la résistance à la compression résultante soit inférieure ou égale à la résistance à la compression calculée à l'aide d'un diagramme contrainte-déformation avec une branche plastique décroissante.
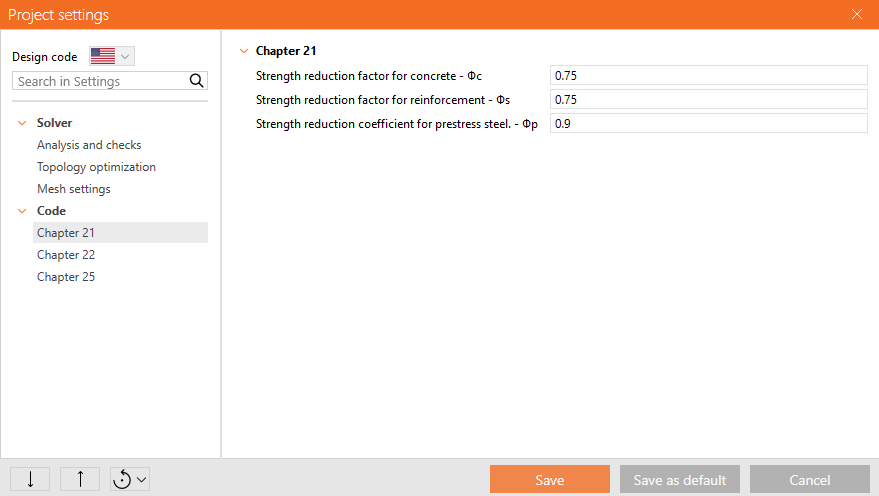
Φc est le facteur de réduction de résistance pour le béton. La valeur par défaut est fixée conformément à l'ACI 318-19 Tableau 24.2.1 (b)(f).
kc2 est le facteur de réduction dû à la présence de fissuration transversale.
f'c est la résistance cylindrique du béton (en MPa pour la définition de ).
kc2 est un facteur de réduction basé sur les mêmes hypothèses que le coefficient de zone nodale βn donné dans l'ACI 318-19 Tableau 23.9.2, sauf que dans le CSFM, la présence d'une contrainte principale de traction perpendiculaire à la contrainte principale de compression est vérifiée pour chaque élément fini (et non uniquement pour les nœuds du modèle Bielle et tirant).
Béton – État limite de service
L'analyse à l'état limite de service contient certaines simplifications des modèles constitutifs utilisés pour l'analyse de résistance. La branche plastique de la courbe contrainte-déformation du béton en compression est ignorée, tandis que la branche élastique est linéaire et infinie. La loi d'adoucissement en compression n'est pas prise en compte. Ces simplifications améliorent la stabilité numérique et la vitesse de calcul, et ne réduisent pas la généralité de la solution tant que les limites de contrainte des matériaux résultantes à l'état limite de service sont clairement inférieures à leurs points de plastification (comme l'exige l'ACI). Par conséquent, les modèles simplifiés utilisés pour l'état limite de service ne sont valables que si toutes les exigences de vérification sont satisfaites.
Effets à long terme
Le comportement à long terme de la structure, tel que les flèches à long terme ou le calcul des largeurs de fissures causées par des charges permanentes, est influencé par le fluage du béton. L'ACI 318-19 au paragraphe 24.2.4.1.3 définit le facteur dépendant du temps pour les charges permanentes – ξ représentant l'effet de fluage pour une durée de charge permanente spécifiée.
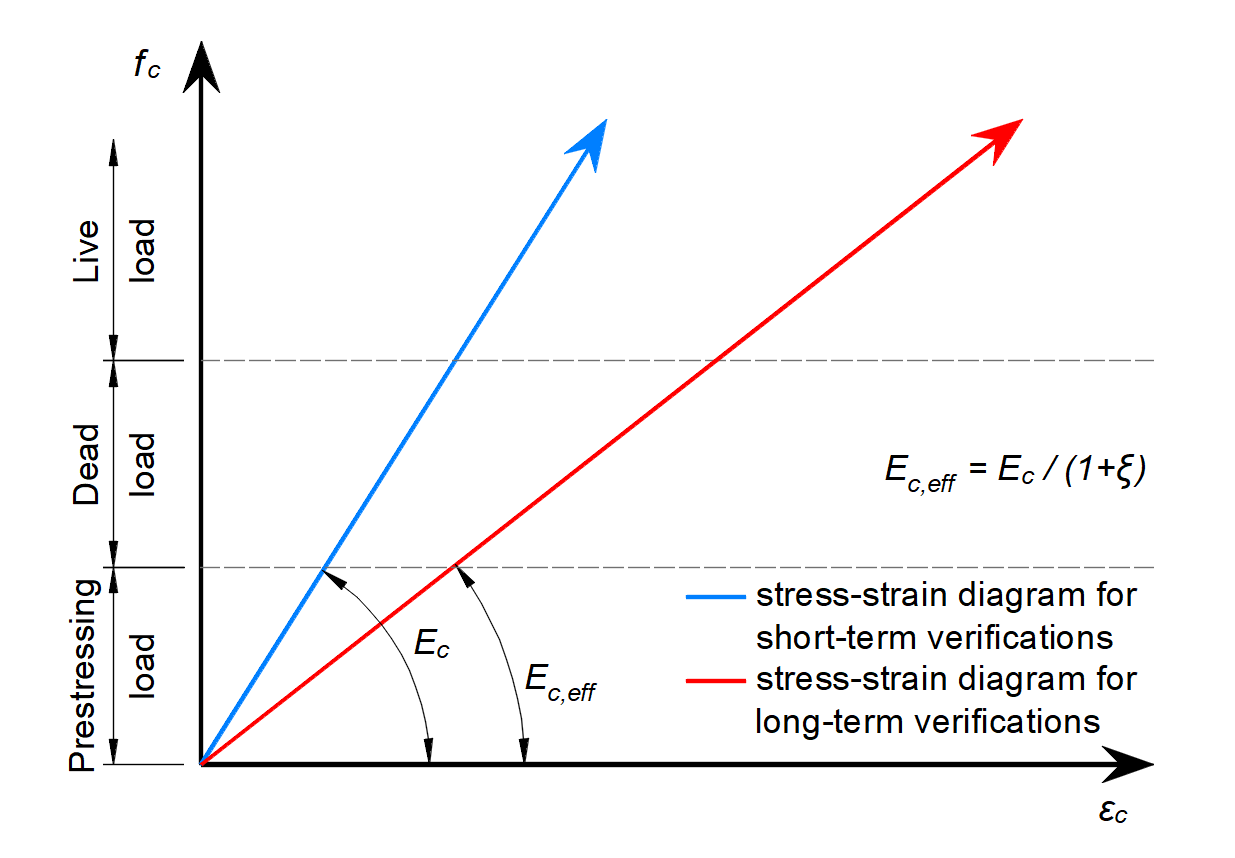
Dans l'application Detail, le module d'élasticité Ec est ajusté pour déterminer le comportement à long terme de la structure par le biais du facteur ξ. Le module d'élasticité ajusté est désigné par Ec,eff – voir Figure 40.
En supposant que la déformation de l'élément est exprimée par la déformation unitaire, on peut écrire :
où :
ε0 est la déformation à court terme (sans l'influence du fluage) et εcreep est la déformation causée par le fluage.
En utilisant la loi de Hooke, on peut écrire :
En substituant et , on obtient :
La durée de la charge permanente pour la détermination du facteur ξ peut être définie individuellement pour chaque combinaison de service à long terme.
Les flèches, contraintes et largeurs de fissures dépendantes du temps sont ensuite calculées avec un modèle de matériau modifié où l'effet du raffinement de la compression est pris en compte automatiquement par la nature de l'analyse par éléments finis. Il n'est donc pas nécessaire de les multiplier davantage par le facteur défini au paragraphe 24.2.4.1.1.
Effets à court terme
Pour effectuer les vérifications à court terme, un autre calcul est réalisé dans lequel toutes les charges sont calculées sans le facteur dépendant du temps pour les charges permanentes. Les deux calculs pour les vérifications à long et à court terme sont représentés à la Fig. 40.
Ferraillage
Un diagramme contrainte-déformation élasto-plastique parfait avec un point de plastification défini pour le ferraillage non précontraint est considéré, voir ACI 319-19 CL. 20.2.1. La définition de ce diagramme ne nécessite que la connaissance des propriétés de base du ferraillage – la résistance et le module d'élasticité.
Le diagramme contrainte-déformation du ferraillage peut également être défini par l'utilisateur, mais dans ce cas, il est impossible de supposer l'effet de raidissement en traction (il est impossible de calculer la largeur des fissures).
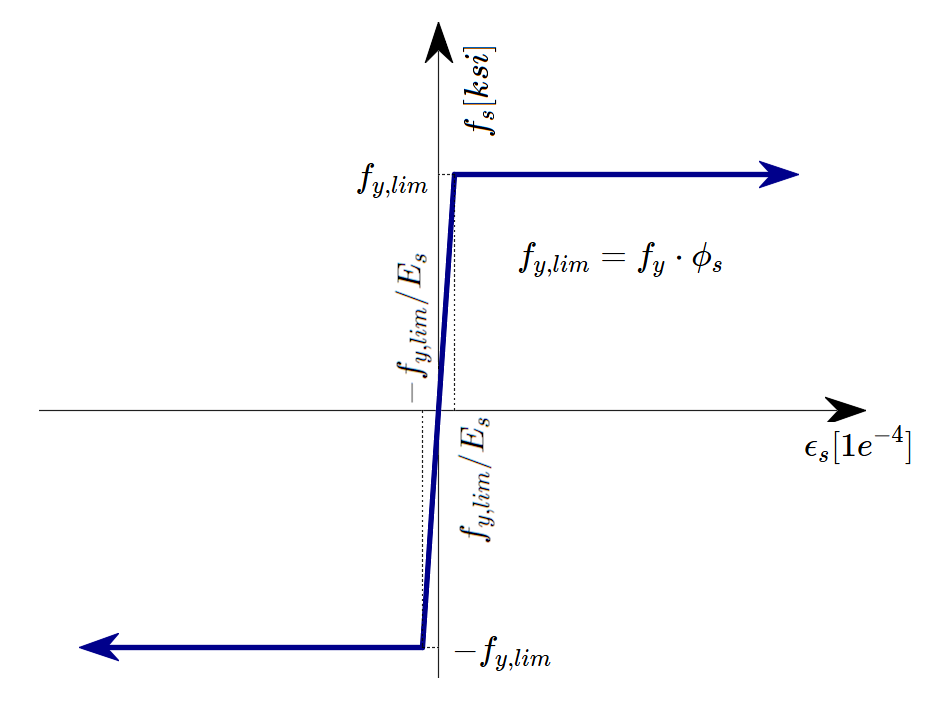
où :
Φs est le facteur de réduction de résistance pour le ferraillage. La valeur par défaut est fixée conformément à l'ACI 318-19 Tableau 24.2.1.
fy est la limite d'élasticité du ferraillage
Es est le module d'élasticité du ferraillage
10 % est sélectionné comme déformation limite à laquelle le calcul est arrêté. Cela est considéré comme sûr sur la base de l'article 7 de l'ASTM A955/A955M-20c.
Le raidissement en traction (Fig. 43) est pris en compte automatiquement en modifiant la relation contrainte-déformation d'entrée de la barre d'armature nue afin de capturer la rigidité moyenne des barres enrobées dans le béton (εm).
La Méthode du Champ de Contraintes Compatible est conforme aux codes de conception modernes. Étant donné que les modèles de calcul n'utilisent que des propriétés matérielles standard, le format des coefficients partiels de sécurité prescrit dans les codes de conception peut être appliqué sans aucune adaptation. Ainsi, les charges d'entrée sont pondérées et les propriétés caractéristiques des matériaux sont réduites à l'aide des facteurs de réduction de résistance respectifs, exactement comme dans l'analyse conventionnelle du béton.
Les valeurs des facteurs de réduction de résistance sont prescrites dans ACI 318-19 Cl. 21.2. Les valeurs par défaut pour le béton et le ferraillage sont choisies sur la base de l'hypothèse que l'exemple type résolu dans l'application est contrôlé par le cisaillement (d'après le Tableau 21.2.1 (b), (f), (g)). Cependant, il est possible de modéliser tout type d'élément. Par conséquent, si un élément contrôlé par la compression ou la traction est évalué, l'utilisateur a la possibilité de modifier la valeur du facteur de réduction de résistance dans les Préférences.
Les facteurs de charge pour les combinaisons de résistance doivent être définis conformément au Tableau 5.3.1 de l'ACI 318-19.
Sauf indication contraire au Chapitre 34, les combinaisons de charges au niveau de service ne sont pas définies dans l'ACI 318-19. Il est recommandé d'utiliser les règles de combinaison basées sur l'Annexe C de l'ASCE/SEI 7-16. Pour tous les modèles, les facteurs de charge sont déjà prédéfinis.
Les différentes vérifications requises par ACI 318-19 sont évaluées sur la base des résultats directs fournis par le modèle. Les vérifications sont effectuées pour la résistance du béton, la résistance du ferraillage et l'ancrage (contraintes de cisaillement d'adhérence).
La résistance du béton en compression est évaluée comme le rapport entre la contrainte principale maximale de compression fc (également σ2 dans les résultats auxiliaires) obtenue par l'analyse EF et la valeur limite f'c,lim.
La résistance du ferraillage est évaluée en traction et en compression comme le rapport entre la contrainte dans le ferraillage aux fissures fs et la valeur limite spécifiée fy,lim.
La contrainte de cisaillement d'adhérence est évaluée indépendamment comme le rapport entre la contrainte d'adhérence τb calculée par l'analyse EF et la résistance d'adhérence fbu.
Cependant, la norme ACI ne traite pas explicitement de la résistance d'adhérence, mais travaille plutôt avec le calcul de la longueur de scellement, décrite à la section 25.4.2. Étant donné que la résistance d'adhérence est un paramètre d'entrée fondamental pour déterminer la longueur de scellement, voir R25.4.1.1 et ACI Committee 408 1966, la résistance d'adhérence peut être calculée comme suit :
Supposons que si nous ancrons la barre de ferraillage dans un bloc de béton sur la longueur de scellement ld ou plus, l'arrachement du ferraillage conduira à la rupture du ferraillage et non à l'arrachement du béton. Cela peut s'écrire avec la formule suivante.
où :
db est le diamètre de la barre de ferraillage, ld est la longueur de scellement, fbu est la résistance d'adhérence, fy est la limite d'élasticité du ferraillage, et As est l'aire de la barre de ferraillage.
À partir de ce qui précède, la formule de calcul de la résistance d'adhérence peut être facilement dérivée :
La longueur de scellement ld est ensuite déterminée conformément au tableau ACI 318-19 25.4.2.3 comme suit :
où :
C = 25 (2,1 pour le système métrique) pour les barres n° 6 et inférieures et les fils déformés, C = 20 (1,7 pour le système métrique) pour les barres n° 7 et supérieures, λ = 1,0 pour le béton de poids normal, ψt, ψe, ψg sont déterminés conformément au tableau ACI 318-19 25.4.2.3.
Seul le ferraillage non revêtu ou zingué (galvanisé) est pris en charge, donc ψe = 1,0. ψg est automatiquement déterminé à partir de la nuance du ferraillage, et ψt est automatiquement dérivé de la position du ferraillage dans le modèle et de la direction de bétonnage qui peut être définie dans l'application pour chaque élément de projet comme suit.
Ces vérifications sont effectuées par rapport aux valeurs limites appropriées pour les parties respectives de la structure (c'est-à-dire que malgré une nuance unique pour le béton et le ferraillage, les diagrammes contrainte-déformation finaux différeront dans chaque partie de la structure en raison des effets de raidissement en traction et d'adoucissement en compression).
Il existe également une option pour modéliser des barres lisses. Plus d'informations peuvent être trouvées ici : Barres lisses dans Detail
Force totale Ftot et force limite Flim
La force totale Ftot est un résultat de l'analyse par éléments finis et peut être définie de deux manières.
où As est l'aire de la barre de ferraillage et fs est la contrainte dans la barre.
Ou comme la somme de la force d'ancrage Fa et de la force d'adhérence Fbond.
où Fa est la force réelle dans le ressort d'ancrage et Fbond est la force d'adhérence qui peut être obtenue en intégrant la contrainte d'adhérence τb sur la longueur de la barre de ferraillage l.
Cs est le périmètre de la barre de ferraillage.
La force limite Flim est la force maximale dans l'élément de la barre de ferraillage en tenant compte de la résistance de la barre et également des conditions d'ancrage (adhérence entre le béton et le ferraillage, crochets d'ancrage, boucles, etc.).
où Cs est le périmètre de la barre de ferraillage, et l est la longueur depuis le début de la barre jusqu'au point d'intérêt.
où Flim,add est la force additionnelle calculée à partir de l'amplitude de l'angle entre les éléments voisins. Flim,2 doit toujours être inférieure à Fu.
Les types d'ancrage disponibles dans CSFM comprennent une barre droite (c'est-à-dire sans réduction de l'extrémité d'ancrage), un crochet à 90 degrés, un crochet à 180 degrés, une adhérence parfaite et une barre continue. Tous ces types, ainsi que les coefficients d'ancrage β respectifs, sont présentés à la Fig. 48 pour le ferraillage longitudinal. Les valeurs des coefficients d'ancrage adoptés sont dérivées de la comparaison de l'équation de la section ACI 318-19 25.4.3.1 et des équations tirées de la section ACI 318-19 25.4.2.3. Il convient de noter que, malgré les différentes options disponibles, CSFM distingue trois types d'extrémités d'ancrage : (i) aucune réduction de la longueur d'ancrage, (ii) une réduction de 30 % de la longueur d'ancrage dans le cas d'un ancrage normalisé, et (iii) une adhérence parfaite.

Le coefficient d'ancrage pour les étriers est toujours - β = 1,0.
Afin de se conformer à l'ACI, le ressort d'ancrage doit être utilisé dans le calcul ; le ressort d'ancrage est modifié par le coefficient β, de sorte que l'utilisateur doit utiliser l'un des types d'ancrage disponibles lors de la définition des conditions de début et de fin du ferraillage.
Lors de la conception de structures en béton, nous rencontrons deux grands groupes de zones partiellement chargées (ZPC) – le premier comprend les appuis, tandis que le second est constitué des zones d'ancrage.
Selon les normes actuellement en vigueur pour la conception des structures en béton armé ACI 318-19 chap. 22.8, l'écrasement local du béton et les efforts de traction transversaux doivent être pris en compte pour les appuis. Pour une charge uniformément répartie sur une aire, Ac1, la capacité en compression du béton peut être augmentée jusqu'à deux fois en fonction de l'aire de distribution de calcul Ac2. Voir le tableau ACI 318-19 22.8.3.2.
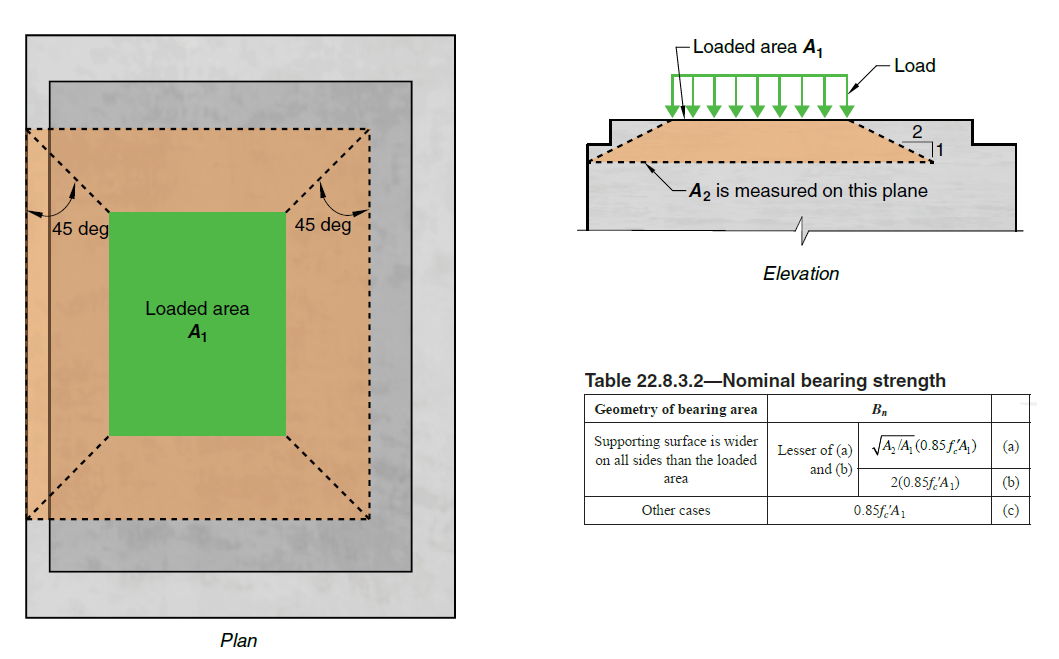
Pour les zones d'ancrage de post-tension, il convient de se référer à l'ACI 318-19 chap. 25.9.
La zone partiellement chargée doit être suffisamment ferraillée avec un ferraillage transversal dimensionné pour transmettre les efforts de fendage qui se produisent dans la zone. Sans le ferraillage transversal requis, il n'est pas possible d'envisager une augmentation de la capacité en compression du béton.
Zones partiellement chargées dans le CSFM
En utilisant le CSFM, il est possible de dimensionner et de vérifier des structures en béton armé en tenant compte de l'influence de l'augmentation de la résistance en compression du béton dans les zones partiellement chargées. Étant donné que le CSFM est un modèle de voile (2D) et que les zones partiellement chargées constituent une tâche spatiale (3D), il a été nécessaire de trouver une solution combinant ces deux types de tâches différents (Fig. 50). Si la fonction « zones partiellement chargées » est activée, la géométrie du cône admissible est créée conformément à l'ACI (Fig. 49). Toutes les collisions géométriques sont résolues entièrement en 3D pour la géométrie de l'élément en béton spécifiée et les dimensions de chaque ZPC. Par la suite, un modèle de calcul de la zone partiellement chargée est créé.
La modification du modèle de matériau s'est avérée être une approche inadaptée, principalement parce que la projection des propriétés sur le maillage d'éléments finis est problématique. Il a été déterminé qu'une approche indépendante du maillage d'éléments finis constitue une solution plus appropriée. Des bielles fictives parfaitement cohérentes sont créées pour la géométrie connue du cône de compression (Fig. 51 et Fig. 52). Ces bielles ont des propriétés de matériau identiques à celles du béton utilisé dans le modèle, y compris le diagramme contrainte-déformation. La forme du cône détermine la direction des bielles, qui distribuent progressivement la charge de la ZPC vers l'aire de distribution de calcul. La densité surfacique des bielles fictives est variable à chaque partie du cône, et elle ajoute une aire fictive de béton dans la direction de la charge. Au niveau de la zone chargée (Ac1), une aire fictive de béton est ajoutée selon le rapport (où Areal est l'aire de l'appui prise en compte dans le modèle de calcul 2D), et cette aire décroît linéairement jusqu'à zéro vers l'aire de distribution de calcul (Ac2). Cette solution garantit que la contrainte de compression dans le béton est constante sur l'ensemble du volume du cône.
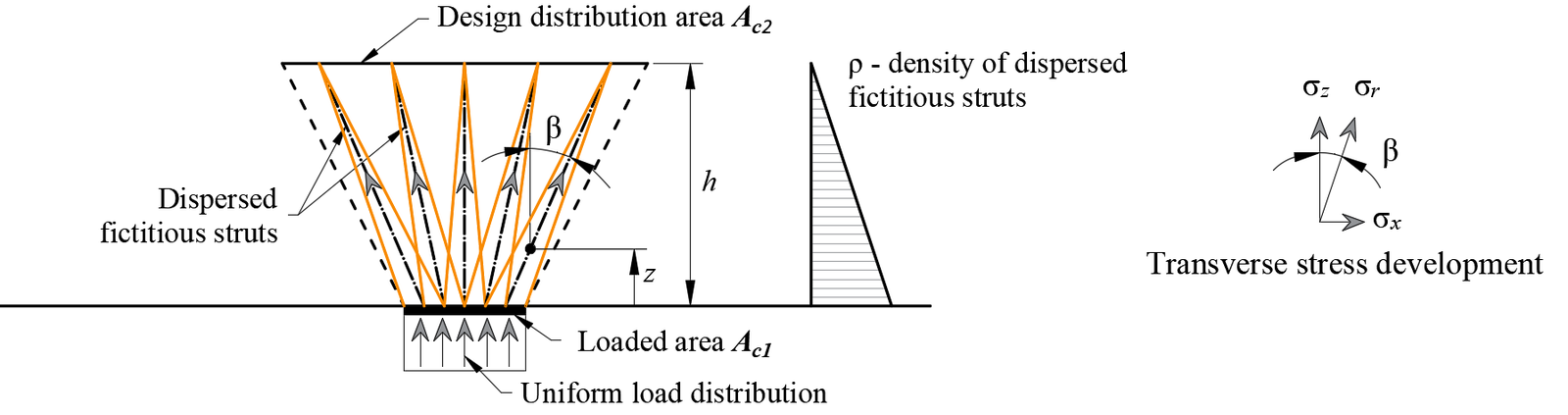
La résistance de la zone partiellement chargée est augmentée selon le rapport entre l'aire de distribution de calcul et l'aire chargée, conformément à l'ACI 318-19 chap. 22.8. Il convient de rappeler qu'il s'agit d'un modèle de calcul qui ne peut pas décrire précisément l'état de contrainte sur une zone partiellement chargée dont la distribution réelle est bien plus complexe. Cependant, cette solution permet une distribution correcte de la charge sur l'ensemble du modèle tout en respectant la capacité portante accrue de la zone partiellement chargée. De plus, elle introduit correctement des contraintes transversales dans cette zone afin de dimensionner correctement le ferraillage pour les efforts de fendage.
La contrainte d'appui admissible de 0,85fc' est indiquée dans le tableau 22.8.3.2. La densité est limitée de sorte que la capacité double maximale donnée par la formule du tableau 22.8.3.2(b) ne soit pas dépassée.
Pour les zones d'ancrage, la ZPC est utilisée de la même manière que pour les appuis dans l'application. C'est pourquoi les zones locales définies au chapitre 25.9 de l'ACI 318-19 doivent être vérifiées manuellement conformément à l'ACI 318-19 25.9.3. La ZPC est donc uniquement utilisée pour éviter de dépasser le critère de déformation dans la zone locale et ainsi d'interrompre prématurément le calcul. En revanche, conformément à l'ACI 318-19, art. 25.9.4.3.1 (b), le ferraillage résistant aux contraintes de bursting et de spalling dans le plan peut être directement et avantageusement vérifié dans l'application.
Les vérifications à l'état limite de service portent sur la limitation des contraintes, la largeur des fissures et les limites de flèche. Les contraintes sont vérifiées dans les éléments en béton et en ferraillage conformément à l'ACI 318-19, de manière similaire à celle spécifiée pour la résistance.
Limitation des contraintes
Les contraintes de compression admissibles dans le béton sous charge de service doivent être vérifiées pour les éléments précontraints de classe U et T. D'après le Tableau R24.5.2.1, aucune vérification de limitation des contraintes n'est requise pour le béton supposé fissuré. L'utilisateur doit définir la classe de l'élément précontraint dans les paramètres de l'élément de calcul.
La contrainte de compression admissible pour les éléments soumis à des charges transitoires est spécifiée par l'ACI 318-19 24.5.4.1 comme 0,6fc'. La limite de contrainte de compression de 0,45fc' a été établie pour réduire la probabilité de rupture des éléments en béton précontraint sous charges répétées. Cette limite semblait également raisonnable pour éviter une déformation excessive par fluage. Pour des valeurs de contrainte plus élevées, les déformations de fluage tendent à augmenter plus rapidement à mesure que la contrainte appliquée augmente.
La contrainte de compression dans le béton est évaluée comme le rapport entre la contrainte principale de compression maximale fc = σc2 obtenue par l'analyse par éléments finis à l'état limite de service et la valeur limite, définie d'après le Tableau 24.5.4.1.
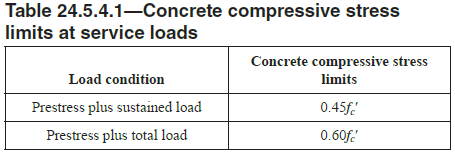
Dans l'application, Précontrainte plus charge permanente est traitée comme une combinaison à long terme, et Précontrainte plus charge totale comme une combinaison à court terme.
Flèche
En fonction du type de combinaison sélectionné (long terme ou court terme), la flèche à long terme ou à court terme est évaluée. La valeur de flèche admissible maximale doit être déterminée par l'utilisateur et doit être prise en compte conformément à l'ACI 138-19 24.2.

Dans l'application, il est possible d'afficher séparément les flèches dues aux charges permanentes ΔDL et aux charges variables ΔLL, ainsi que la flèche totale ΔTot (permanente + variable), tout en affichant la déformée.
Les flèches aux extrémités tronquées ne peuvent pas être vérifiées.
Largeur de fissure
Les largeurs et orientations des fissures sont calculées pour les combinaisons à l'état limite de service à court terme ou à long terme. Étant donné que l'ACI ne prescrit pas directement de largeurs de fissures limites, l'utilisateur doit spécifier une largeur de fissure limite wlim.
Les vérifications sont présentées comme suit :
où :
w largeur de fissure à court ou long terme calculée par l'analyse par éléments finis,
wlim valeur limite de la largeur de fissure définie par l'utilisateur.
La méthode de calcul des largeurs de fissures utilisée dans l'application, également décrite plus en détail dans ce document, est conforme à l'ACI 224R-01. Il est donc possible d'utiliser le Tableau 4.1 de l'ACI 224R-01 pour déterminer la valeur limite des largeurs de fissures.
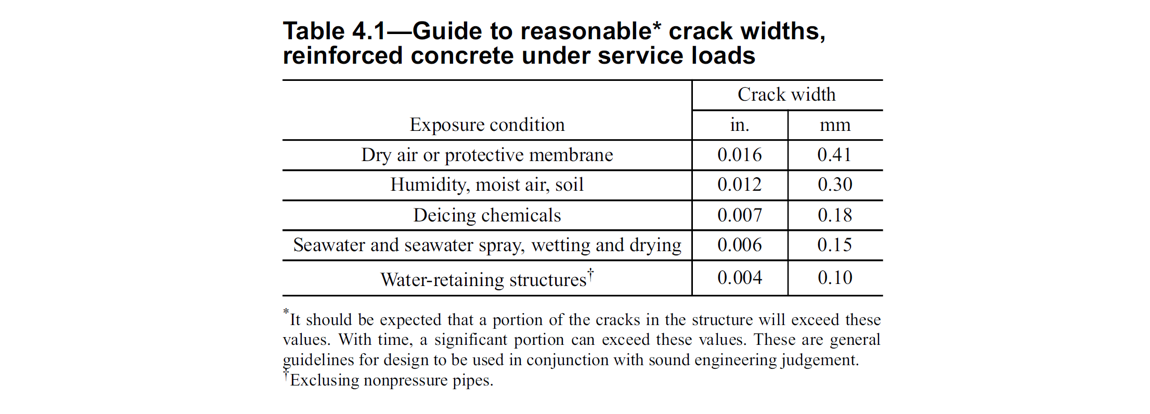
Il existe deux méthodes de calcul des largeurs de fissures (fissuration stabilisée et non stabilisée). Dans le cas général (fissuration stabilisée), la largeur de fissure est calculée en intégrant les déformations sur les éléments 1D des barres de ferraillage. La direction de la fissure est ensuite calculée à partir des trois points d'intégration les plus proches (du centre de l'élément fini 1D de ferraillage considéré) des éléments 2D en béton. Bien que cette approche du calcul des directions de fissures ne corresponde pas à la position réelle des fissures, elle fournit néanmoins des valeurs représentatives conduisant à des résultats de largeur de fissure comparables aux valeurs de largeur de fissure requises par la norme à la position de la barre de ferraillage.
6 Vérifications structurelles selon AASHTO
Béton - Résistance
Le modèle de béton implémenté pour les calculs de résistance dans CSFM est basé sur les hypothèses de calcul à la résistance de l'AASHTO LRFD relatives à l'équilibre et à la compatibilité des déformations. Conformément à l'article 5.6.2.1 de l'AASHTO LRFD (2024), la résistance à la traction du béton est négligée.
L'implémentation du CSFM dans IDEA StatiCa Detail ne considère pas de critère de rupture explicite en termes de déformations pour le béton en compression (c'est-à-dire qu'après l'atteinte de la contrainte maximale, elle considère une branche plastique avec εc0 à une valeur maximale de 5 %, tandis que l'article 5.6.2.1 de l'AASHTO LRFD (2024) suppose une déformation ultime inférieure à 0,3 %). Cette simplification ne permet pas de vérifier la capacité de déformation des structures dont la rupture se produit en compression. Cependant, la résistance est correctement prédite lorsque, en plus du facteur de béton fissuré (kc2 défini à la (Fig. 57)), l'augmentation de la fragilité du béton avec l'accroissement de sa résistance est prise en compte au moyen du facteur de réduction défini dans le fib Model Code 2010 comme suit :
où :
α1 est le facteur de réduction de la résistance à la compression du béton défini à l'article 5.6.2.2 de l'AASHTO LRFD (2024). Lors de l'utilisation d'un diagramme contrainte-déformation de type parabole-rectangle, il est nécessaire de réduire la contrainte de compression maximale par ce facteur. Cela permet de moyenner la distribution des contraintes dans la zone comprimée de telle sorte que la résistance à la compression résultante soit inférieure ou égale à la résistance à la compression calculée à l'aide d'un diagramme contrainte-déformation avec une branche plastique décroissante.
Φc est le facteur de résistance pour le béton. La valeur par défaut est fixée conformément à l'article 5.5.4.2 de l'AASHTO LRFD (2024).
kc2 est le facteur de réduction dû à la présence de fissuration transversale.
f'c est la résistance en compression sur cylindre du béton (en MPa pour la définition de ).
kc2 est un facteur de réduction basé sur les mêmes hypothèses que le facteur d'efficacité du béton ν donné dans l'AASHTO LRFD (2024) 5.8.2.5.3a et le Tableau 5.8.2.5.3a-1, à l'exception que dans le CSFM, la présence d'une contrainte principale de traction perpendiculaire à la contrainte principale de compression est vérifiée pour chaque élément fini (et non uniquement pour les nœuds du modèle Bielle et tirant).
Béton – État limite de service
L'analyse à l'état limite de service comporte certaines simplifications des modèles constitutifs utilisés pour l'analyse de résistance. La branche plastique du diagramme contrainte-déformation du béton en compression est ignorée, tandis que la branche élastique est linéaire et infinie. La loi d'adoucissement en compression n'est pas prise en compte. Ces simplifications améliorent la stabilité numérique et la vitesse de calcul, et ne réduisent pas la généralité de la solution tant que les limites de contrainte des matériaux résultantes à l'état limite de service sont clairement inférieures à leurs points de plastification (conformément à l'approche de l'état limite de service de l'AASHTO LRFD). Par conséquent, les modèles simplifiés utilisés pour l'état limite de service ne sont valables que si toutes les exigences de vérification sont satisfaites.
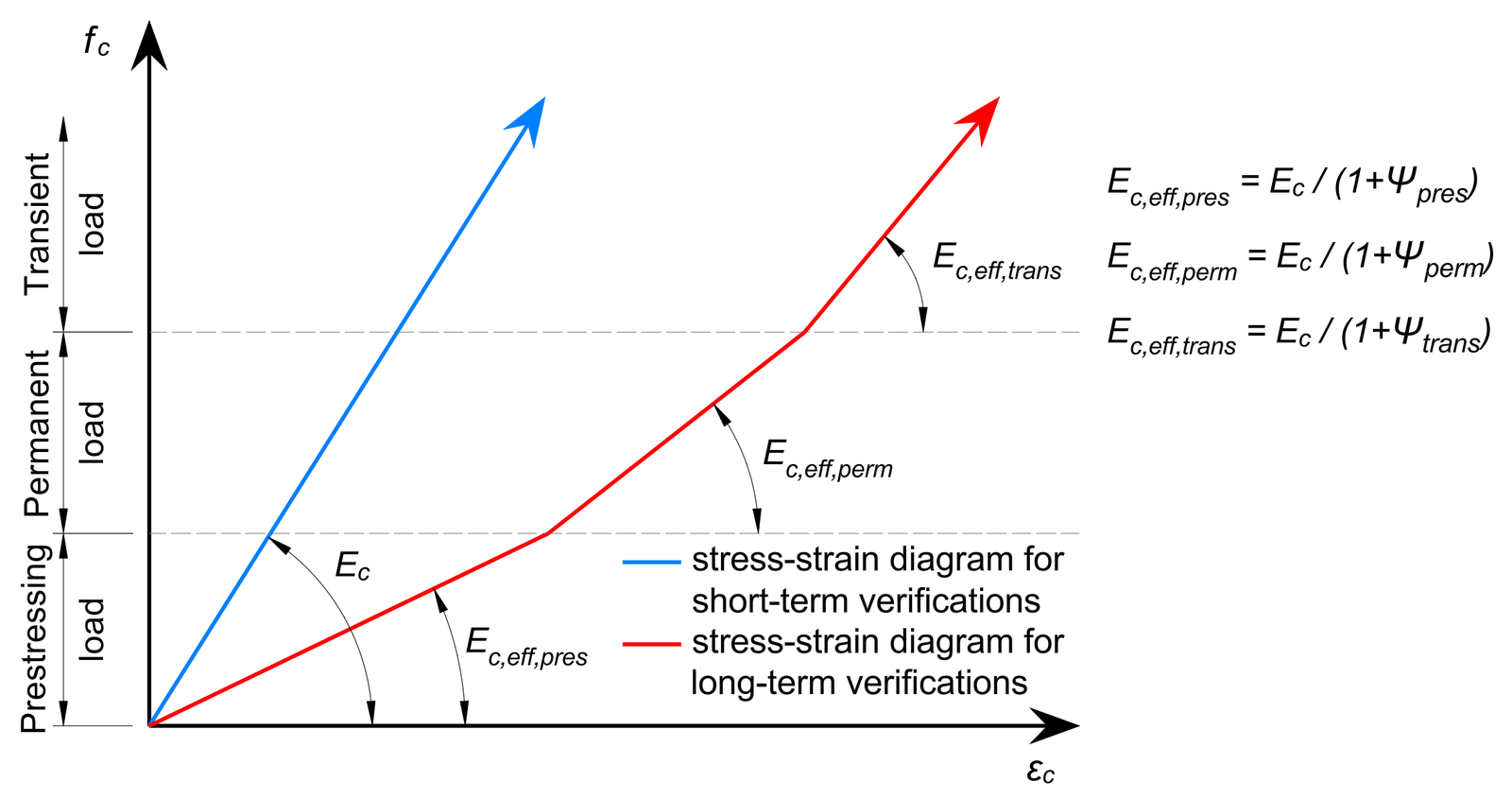
Effets à long terme
La loi constitutive à long terme (la courbe rouge de la Fig. 59) est utilisée pour le calcul de la largeur des fissures, la flèche totale et la limitation des contraintes des éléments précontraints lorsque l'effet à long terme est sélectionné dans le ruban supérieur. Dans l'application IDEA StatiCa Detail, le module d'élasticité effectif est utilisé pour la vérification des effets à long terme, comme mentionné dans l'AASHTO LRFD (2024) C5.12.5.3.6-1.
où :
Ec est le module d'élasticité défini à l'article 5.4.2.4 de l'AASHTO LRFD (2024)
ψ est le coefficient de fluage défini à l'article 5.4.2.3.2 de l'AASHTO LRFD (2024)
Les facteurs de fluage sont définis par l'utilisateur dans les propriétés des matériaux.
Effets à court terme
Pour effectuer les vérifications à court terme, un autre calcul est réalisé dans lequel toutes les charges sont calculées sans le facteur de fluage. Les deux calculs pour les vérifications à long et à court terme sont représentés à la Fig. 59.
Ferraillage
Un diagramme contrainte-déformation élasto-plastique parfait avec un point de plastification défini est considéré pour le ferraillage non précontraint, voir l'article 5.4.3 de l'AASHTO LRFD (2024). La définition de ce diagramme ne nécessite que la connaissance des propriétés de base du ferraillage – la résistance et le module d'élasticité.
Le diagramme contrainte-déformation du ferraillage peut également être défini par l'utilisateur, mais dans ce cas, il est impossible de prendre en compte l'effet de raidissement en traction (il est impossible de calculer la largeur des fissures).
où :
Φs est le facteur de résistance pour le ferraillage. La valeur par défaut est fixée conformément à l'article 5.5.4.2 de l'AASHTO LRFD (2024).
fy est la limite d'élasticité du ferraillage
Es est le module d'élasticité du ferraillage
10 % est sélectionné comme déformation limite à laquelle le calcul est arrêté. Cela est considéré comme sûr conformément à l'article 7 de l'ASTM A955/A955M-20c.
Le raidissement en traction (Fig. 61) est pris en compte automatiquement en modifiant la relation contrainte-déformation d'entrée de la barre de ferraillage nue afin de capturer la rigidité moyenne des barres noyées dans le béton (εm).
La Méthode du Champ de Contraintes Compatible est conforme aux codes de conception modernes. Comme les modèles de calcul n'utilisent que des propriétés matérielles standard, le format des coefficients partiels de sécurité prescrit dans les codes de conception peut être appliqué sans aucune adaptation. Ainsi, les charges appliquées sont pondérées et les propriétés caractéristiques des matériaux sont réduites à l'aide des facteurs de résistance respectifs, exactement comme dans l'analyse conventionnelle du béton.
Les valeurs des facteurs de résistance sont prescrites dans l'article 5.5.4 de l'AASHTO LRFD (2024). Les valeurs par défaut pour le béton et le ferraillage sont choisies de manière conservative, en supposant que l'exemple type résolu est une région D — cas typique pour la méthode Bielle-et-tirant. Il est toutefois possible de modéliser tout type d'élément. Par conséquent, si un élément contrôlé par la compression ou la traction est évalué, l'utilisateur a la possibilité de modifier la valeur du facteur de réduction de résistance dans les Préférences.
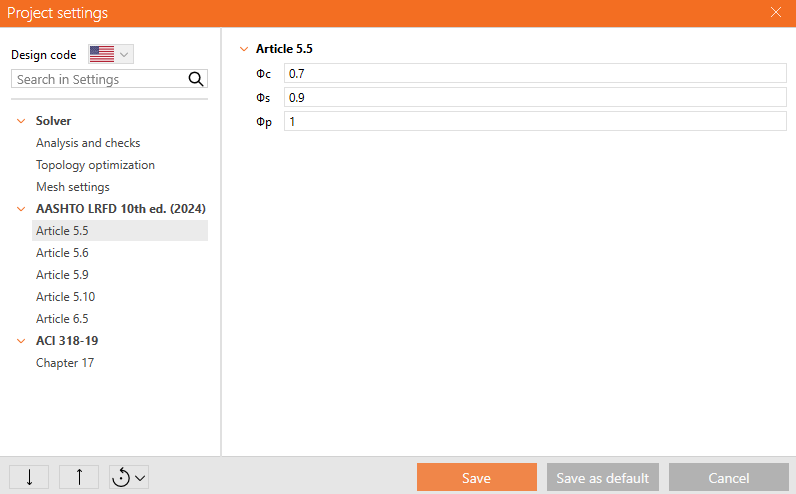
Les facteurs de charge et les combinaisons de charges doivent être définis conformément aux spécifications de conception des ponts AASHTO LRFD (2024), article 3.4.1 et tableaux 3.4.1-1 à 3.4.1-6. L'AASHTO LRFD spécifie explicitement les combinaisons de charges à l'état limite de résistance (Résistance I à Résistance V) ainsi que les combinaisons de charges en service (Service I à Service IV), y compris les facteurs de charge correspondants pour chaque cas.
Pour chaque modèle, le programme inclut des combinaisons de base prédéfinies qui nécessitent d'être complétées en fonction de l'élément traité.
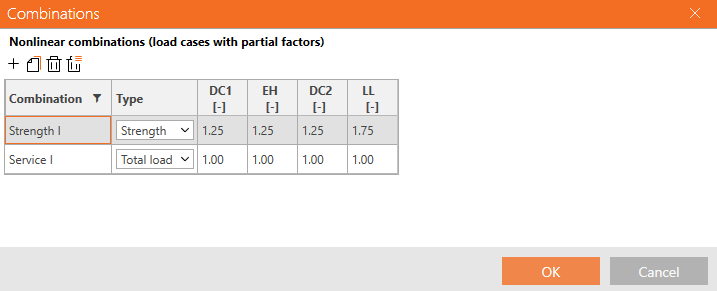
Les différentes vérifications requises par AASHTO sont évaluées sur la base des résultats directs fournis par le modèle. Les vérifications sont effectuées pour la résistance du béton, la résistance du ferraillage et l'ancrage (contraintes de cisaillement d'adhérence).
La résistance du béton en compression est évaluée comme le rapport entre la contrainte principale maximale de compression fc (également σ2 dans les résultats auxiliaires) obtenue par l'analyse EF et la valeur limite f'c,lim.
La résistance du ferraillage est évaluée en traction et en compression comme le rapport entre la contrainte dans le ferraillage aux fissures fs et la valeur limite spécifiée fy,lim.
La contrainte de cisaillement d'adhérence est évaluée indépendamment comme le rapport entre la contrainte d'adhérence τb calculée par l'analyse EF et la résistance d'adhérence fbu.
Cependant, étant donné que la résistance d'adhérence n'est pas explicitement définie dans AASHTO, sa valeur doit être déterminée à l'aide des équations qui définissent la longueur de scellement. La résistance d'adhérence est, en fait, la donnée d'entrée principale pour déterminer la longueur de scellement ; voir, par exemple, l'article AASHTO LRFD (2024) Article C5.10.8.2 ou NCHRP Report 733, Attachment E page E-9.
Le calcul décrit dans AASHTO LRFD (2024) Articles 5.10.8.2.1 et 5.10.8.2.2, qui nécessite la connaissance de l'espacement maximal centre à centre du ferraillage transversal dans ld, du nombre de barres ou fils ancrés le long du plan de fissuration, de l'aire totale de la section transversale de tout le ferraillage transversal, et d'autres grandeurs géométriques qui ne peuvent pas être déterminées de manière fiable dans le modèle de l'application Detail pour une entrée générale, une approche a été adoptée à partir de AASHTO LRFD (2014) Article 5.11.2.1.1 de la manière suivante :
Supposons que si nous ancrons la barre de ferraillage dans un bloc de béton jusqu'à la longueur de scellement ld ou au-delà, l'arrachement du ferraillage conduira à la rupture du ferraillage et non à l'arrachement du béton. Cela peut s'écrire avec la formule suivante.
où :
- db est le diamètre de la barre de ferraillage
- ld est la longueur de scellement
- fbu est la résistance d'adhérence
- fy est la limite d'élasticité du ferraillage
- Ab est l'aire de la section de la barre de ferraillage
À partir de ce qui précède, la formule de calcul de la résistance d'adhérence peut être facilement dérivée.
La longueur de scellement de base en traction ldb est déterminée dans AASHTO LRFD (2014) Article 5.11.2.1.1 comme suit :
Pour les barres No. 11 et inférieures :
Pour les barres No. 14 :
Pour les barres No. 18 :
où :
- Ab est l'aire de la section de la barre de ferraillage (in2)
- fy est la limite d'élasticité spécifiée du ferraillage (ksi)
- f'c résistance à la compression spécifiée du béton à 28 jours, sauf si un autre âge est spécifié (ksi)
- db est le diamètre de la barre de ferraillage (in)
Ensuite, en multipliant la longueur de scellement de base ldb par les facteurs décrits dans AASHTO LRFD (2014) Articles 5.11.2.1.2 et 5.11.2.1.3, la longueur de scellement ld utilisée comme donnée d'entrée est déterminée.
Les facteurs de modification réduisant la longueur de scellement issus de 5.11.2.1.3 sont toujours égaux à 1,0 dans l'application. Le facteur de modification pour le ferraillage horizontal supérieur ou quasi horizontal est égal à 1,4 pour des conditions d'adhérence « mauvaises », conformément à la figure suivante :
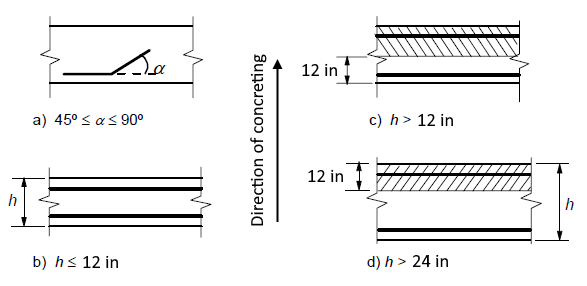
La direction du bétonnage peut être définie dans l'application.
Tous les autres facteurs déterminés en 5.11.2.1.2 sont égaux à 1,0 car seul le béton de poids normal est pris en charge, et seul le ferraillage non revêtu est pris en charge.
La contrainte de cisaillement d'adhérence et la résistance d'adhérence des barres en compression sont calculées de manière analogue aux barres en traction, mais les équations de AASHTO LRFD (2014) Article 5.11.2.2 sont utilisées.
Il existe également une option pour modéliser des armatures lisses. Plus d'informations peuvent être trouvées ici : Armatures lisses dans Detail
Force totale Ftot et force limite Flim
La force totale Ftot est un résultat de l'analyse par éléments finis et peut être définie de deux manières.
où Ab est l'aire de la section de la barre de ferraillage et fs est la contrainte dans la barre.
Ou comme la somme de la force d'ancrage Fa et de la force d'adhérence Fbond.
où Fa est la force réelle dans le ressort d'ancrage et Fbond est la force d'adhérence qui peut être obtenue en intégrant la contrainte d'adhérence τb sur la longueur de la barre de ferraillage l.
Cs est le périmètre de la barre de ferraillage.
La force limite Flim est la force maximale dans l'élément de la barre de ferraillage en tenant compte de la résistance de la barre et également des conditions d'ancrage (adhérence entre le béton et le ferraillage et crochets d'ancrage, boucles, etc.).
où Cs est le périmètre de la barre de ferraillage, et l est la longueur depuis le début de la barre jusqu'au point d'intérêt.
où Flim,add est la force additionnelle calculée à partir de la valeur de l'angle entre les éléments voisins. Flim,2 doit toujours être inférieure à Fu.
Les types d'ancrage disponibles dans CSFM comprennent une barre droite (c'est-à-dire sans réduction d'extrémité d'ancrage), un crochet à 90 degrés, un crochet à 180 degrés, une adhérence parfaite et une barre continue. Tous ces types, ainsi que les coefficients d'ancrage β respectifs, sont présentés à la Fig. 67 pour le ferraillage longitudinal. Les valeurs des coefficients d'ancrage adoptés sont dérivées de la comparaison de l'équation de la section AASHTO LRFD (2014) 5.11.2.1 et des équations tirées de la section AASHTO LRFD (2014) 5.11.2.4.1. Il convient de noter que, malgré les différentes options disponibles, CSFM distingue trois types d'extrémités d'ancrage : (i) aucune réduction de la longueur d'ancrage, (ii) une réduction de 30 % de la longueur d'ancrage dans le cas d'un ancrage normalisé, et (iii) une adhérence parfaite.
Le coefficient d'ancrage pour les étriers (disponible pour l'élément poutre) est toujours - β = 1,0.
Afin de se conformer à AASHTO, le ressort d'ancrage doit être utilisé dans le calcul. Le ressort d'ancrage est modifié par le coefficient β, de sorte que l'utilisateur doit utiliser l'un des types d'ancrage disponibles lors de la définition des conditions de début et de fin du ferraillage.
Lors de la conception de structures en béton, on rencontre deux grands groupes d'aires partiellement chargées (APC) – le premier comprend les appuis, tandis que le second comprend les zones d'ancrage.
Selon les normes actuellement en vigueur pour la conception des structures en béton armé, l'écrasement local du béton et les efforts de traction transversaux doivent être pris en compte pour les appuis. Pour une charge uniformément répartie sur une aire A1, la capacité en compression du béton peut être augmentée jusqu'à deux fois en fonction de l'aire de diffusion de calcul A2. Voir l'article 5.6.5 de l'AASHTO LRFD (2024).
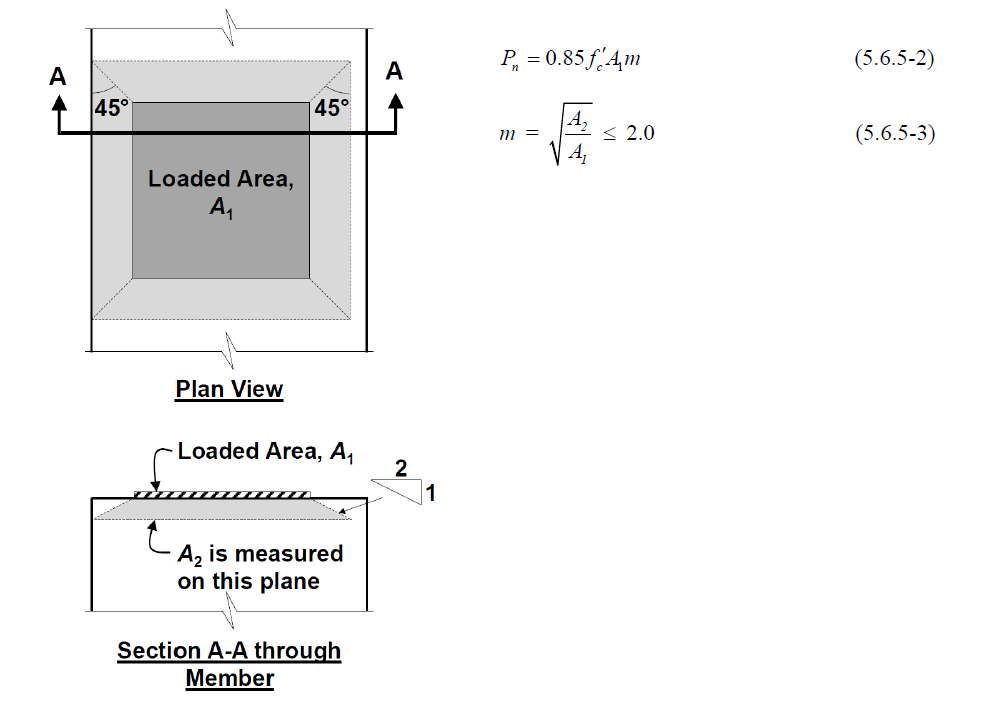
Pour les zones d'ancrage post-tendues, l'article 5.8.4.4 de l'AASHTO LRFD (2024) doit être respecté.
L'aire partiellement chargée doit être suffisamment ferraillée avec un ferraillage transversal dimensionné pour transmettre les efforts de fendage qui se produisent dans la zone. Sans le ferraillage transversal requis, il n'est pas possible d'envisager une augmentation de la capacité en compression du béton.
Aires partiellement chargées dans le CSFM
En utilisant le CSFM, il est possible de dimensionner et de vérifier des structures en béton armé en tenant compte de l'influence de l'augmentation de la résistance en compression du béton dans les aires partiellement chargées. Étant donné que le CSFM est un modèle de voile (2D) et que les aires partiellement chargées constituent une tâche spatiale (3D), il a été nécessaire de trouver une solution combinant ces deux types de tâches différents (Fig. 69). Si la fonction « aires partiellement chargées » est activée, la géométrie du cône admissible est créée conformément à l'ACI (Fig. 68). Toutes les collisions géométriques sont résolues entièrement en 3D pour la géométrie de l'élément en béton spécifiée et les dimensions de chaque APC. Par la suite, un modèle de calcul de l'aire partiellement chargée est créé.
La modification du modèle de matériau s'est avérée être une approche inadaptée, principalement parce que la projection des propriétés sur le maillage d'éléments finis est problématique. Il a été déterminé qu'une approche indépendante du maillage d'éléments finis constitue une solution plus appropriée. Des bielles fictives parfaitement cohérentes sont créées pour la géométrie connue du cône de compression (Fig. 70 et Fig. 71). Ces bielles ont des propriétés de matériau identiques à celles du béton utilisé dans le modèle, y compris le diagramme contrainte-déformation. La forme du cône détermine la direction des bielles, qui distribuent progressivement la charge sur l'APC vers l'aire de diffusion de calcul. La densité surfacique des bielles fictives est variable à chaque partie du cône et ajoute une aire fictive de béton dans la direction de la charge. Au niveau de l'aire chargée (A1), une aire fictive de béton est ajoutée selon le rapport (où Areal est l'aire de l'appui prise en compte dans le modèle de calcul 2D), et cette aire décroît linéairement jusqu'à zéro vers l'aire de diffusion de calcul (A2). Cette solution garantit que la contrainte de compression dans le béton est constante sur l'ensemble du volume du cône.
La résistance de l'aire partiellement chargée est augmentée selon le rapport entre l'aire de diffusion de calcul et l'aire chargée, conformément à l'article 5.6.5 de l'AASHTO LRFD (2024). Il convient de rappeler qu'il s'agit d'un modèle de calcul qui ne peut pas décrire précisément l'état de contrainte sur une aire partiellement chargée dont le cheminement réel est bien plus complexe. Cependant, cette solution permet une distribution correcte de la charge sur l'ensemble du modèle tout en respectant la capacité portante accrue de l'aire partiellement chargée. De plus, elle introduit correctement des contraintes transversales dans cette zone afin de dimensionner correctement le ferraillage pour les efforts de fendage.
La contrainte d'appui admissible de 0,85fc' est indiquée à l'article 5.8.4.4 de l'AASHTO LRFD (2024). La densité est limitée de sorte que la capacité double maximale donnée dans la formule 5.6.5-3 ne soit pas dépassée.
Pour les zones d'ancrage, l'APC est utilisée de la même manière que pour les appuis dans l'application. C'est pourquoi les contraintes de compression dans les zones locales et globales définies aux articles 5.8.4.4 et 5.8.4.5 doivent être vérifiées manuellement. L'APC est donc uniquement utilisée pour éviter de dépasser le critère de déformation dans la zone locale et ainsi d'interrompre prématurément le calcul. En revanche, le ferraillage résistant aux efforts d'éclatement, d'épaufrure dans le plan et aux contraintes de traction en bord dans les zones générales (définies à l'article 5.8.4.5) peut être directement et avantageusement vérifié dans l'application.
Les vérifications à l'état limite de service sont effectuées pour la limitation des contraintes, la largeur des fissures et les limites de flèche. Les contraintes sont vérifiées dans les éléments en béton et en ferraillage selon AASHTO LRFD, de manière similaire à celle spécifiée pour la résistance.
Limitation des contraintes
La contrainte de béton en compression est évaluée uniquement pour les éléments précontraints (lorsque le cas de charge de précontrainte est présent dans le modèle), sous la forme du rapport entre la contrainte principale maximale de compression fc = σc2 obtenue par l'analyse par éléments finis à l'état limite de service et les valeurs limites, qui sont définies sur la base du tableau AASHTO LRFD 5.9.2.3.2a-1.

Dans l'application, Précontrainte plus charge permanente est traitée comme une charge soutenue, et Précontrainte, charge permanente et charge transitoire comme une charge totale.
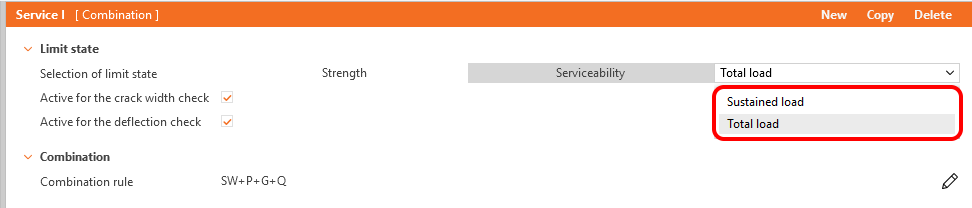
De plus, il est toujours possible d'effectuer une analyse pour les effets à court terme et à long terme, en utilisant des modèles de matériaux qui tiennent compte ou non du coefficient de fluage — voir la section « Modèles de matériaux (AASHTO) ».

Flèche
Les flèches instantanées et les flèches totales sont évaluées pour chaque combinaison pour laquelle l'évaluation de la flèche est activée.
- Pour les flèches instantanées, le module d'élasticité Ec selon AASHTO LRFD (2024) article 5.4.2.4 est utilisé.
- Pour les flèches totales, le module d'élasticité effectif Ec,eff selon AASHTO LRFD (2024) article C5.12.5.3.6 est utilisé.
Voir le chapitre 'Modèles de matériaux (AASHTO) - Béton – État limite de service' dans ce document.
La vérification de la flèche elle-même est activée dans le ruban supérieur. L'utilisateur définit les valeurs limites de flèche conformément à AASHTO LRFD (2024) article 2.5.2.6.2, en fonction du type d'élément analysé.

Les flèches aux extrémités tronquées ne peuvent pas être vérifiées.
Largeur de fissure
Les largeurs et orientations des fissures sont calculées uniquement pour les effets à long terme (en utilisant Ec,eff selon AASHTO LRFD (2024) article C5.12.5.3.6) pour les combinaisons pour lesquelles l'évaluation de la largeur de fissure est activée. Les vérifications basées sur les valeurs limites définies par l'utilisateur sont les suivantes :
où :
w largeur de fissure calculée par l'analyse par éléments finis,
wlim valeur limite de la largeur de fissure définie par l'utilisateur.
La valeur limite wlim doit être déterminée en fonction du type d'élément et de la classe d'exposition conformément à AASHTO LRFD (2024) article 5.6.7 et son commentaire.
Il existe deux méthodes de calcul des largeurs de fissures (fissuration stabilisée et non stabilisée). Dans le cas général (fissuration stabilisée), la largeur de fissure est calculée en intégrant les déformations sur les éléments 1D des barres de ferraillage. La direction de la fissure est ensuite calculée à partir des trois points d'intégration les plus proches (du centre de l'élément fini 1D de ferraillage considéré) des éléments 2D en béton. Bien que cette approche de calcul des directions de fissures ne corresponde pas à la position réelle des fissures, elle fournit néanmoins des valeurs représentatives conduisant à des résultats de largeur de fissure comparables aux valeurs de largeur de fissure requises par la norme à la position de la barre de ferraillage.
7 Vérifications structurelles selon la norme australienne AS 3600 (2018)
L'évaluation de la structure à l'aide du CSFM est réalisée par deux analyses distinctes : l'une pour les combinaisons de charges à l'ELS, et l'autre pour les combinaisons de charges de résistance. L'analyse à l'ELS suppose que le comportement sous charges factorisées est satisfaisant et que les conditions de plastification du matériau ne seront pas atteintes aux niveaux de charge de service. Cette approche permet l'utilisation de modèles constitutifs simplifiés (avec une branche linéaire du diagramme contrainte-déformation du béton) pour l'analyse à l'ELS, afin d'améliorer la stabilité numérique et la vitesse de calcul.
Le CSFM est une méthode d'analyse structurelle qui satisfait aux règles générales des chapitres 6.1.1 et 6.1.2 et est définie comme (f) analyse non linéaire des contraintes au chapitre 6.1.3 - et plus loin au chapitre 6.6.
L'analyse par CSFM prend en compte tous les effets non linéaires et inélastiques pertinents (à l'exception du retrait) définis au paragraphe 6.6.3.
Afin de satisfaire aux exigences des sections 6.6.4 et 6.6.5 - des informations complémentaires sont disponibles dans AS3600:2018 Sup 1:2022 Section C6.6 - des vérifications et validations de la méthode ont été réalisées dans diverses universités. Des articles individuels résumant les résultats de vérification et de validation sont disponibles au lien suivant.
Étant donné que IDEA StatiCa Detail est un logiciel de dimensionnement pratique, la résistance caractéristique factorisée à la compression sur cylindre à 28 jours f'c est utilisée pour les calculs, comme décrit dans le chapitre suivant.
Béton - Résistance
Le modèle de béton implémenté pour les calculs de résistance dans le CSFM est basé sur la courbe contrainte-déformation parabolique-plastique. La résistance à la traction est négligée, comme c'est le cas dans le dimensionnement classique du béton armé.
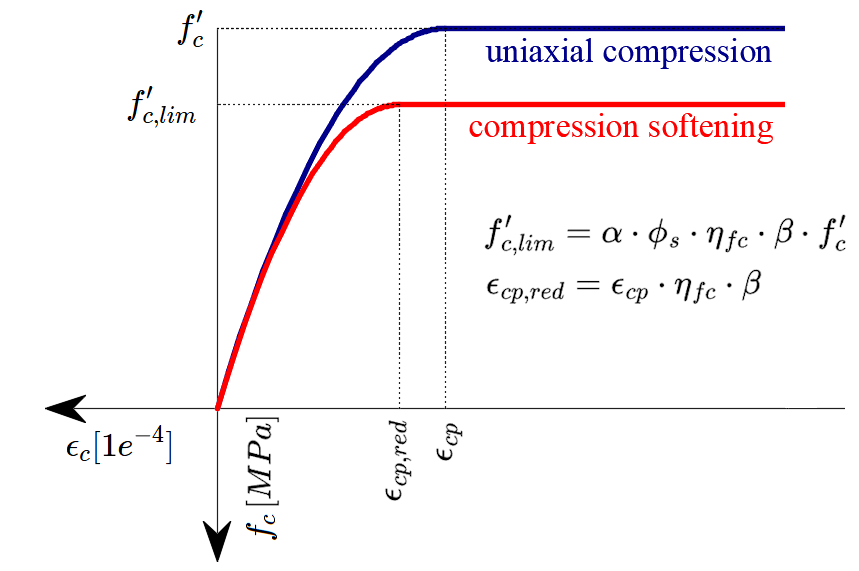
L'implémentation du CSFM dans IDEA StatiCa Detail ne considère pas de critère de rupture explicite en termes de déformations pour le béton en compression (c'est-à-dire qu'après l'atteinte de la contrainte maximale, elle considère une branche plastique avec εc0 à une valeur maximale de 5 %, tandis que la norme AS 3600 Cl. 8.3.1 suppose une déformation ultime inférieure à 0,3 %). Cette simplification ne permet pas de vérifier la capacité de déformation des structures dont la rupture se produit en compression. Cependant, la résistance est correctement prédite lorsque, en plus du facteur de béton fissuré (kc2 défini à la (Fig. 77)), l'augmentation de la fragilité du béton avec l'accroissement de sa résistance est prise en compte au moyen du facteur de réduction défini dans le fib Model Code 2010 comme suit :
où :
α2 est le facteur de réduction de la résistance à la compression du béton défini dans AS 3600 Cl. 8.3.1
Lors de l'utilisation d'un diagramme contrainte-déformation parabolique-rectangulaire, il est nécessaire de réduire la contrainte de compression maximale par ce facteur. Cela permet de moyenner la distribution des contraintes dans la zone comprimée de telle sorte que la résistance à la compression résultante soit inférieure ou égale à la résistance à la compression calculée à l'aide d'un diagramme contrainte-déformation avec une branche plastique décroissante. Une approche analogue est définie pour le bloc de contraintes rectangulaire au Chapitre 8.1.3.
Φs est le facteur de réduction des contraintes pour le béton. La valeur par défaut est fixée conformément au Tableau 2.2.3 de la norme AS 3600.
β est le facteur de réduction dû à la présence de fissuration transversale (également désigné par kc2 dans ce texte)
f'c est la résistance cylindrique du béton (en MPa pour la définition de ).
β est un facteur de réduction basé sur les mêmes principes qu'un facteur de résistance à la compression effective défini au Chapitre 2.2.3. La littérature à partir de laquelle ce facteur est déterminé peut être trouvée (y compris dans le contexte de la norme AS3600) dans AS3600:2018 Sup 1:2022 CL. C2.2.3.
Béton – État limite de service
L'analyse à l'état limite de service contient certaines simplifications des modèles constitutifs utilisés pour l'analyse de résistance. La branche plastique de la courbe contrainte-déformation du béton en compression est ignorée, tandis que la branche élastique est linéaire et infinie. La loi d'adoucissement en compression n'est pas prise en compte. Ces simplifications améliorent la stabilité numérique et la vitesse de calcul et ne réduisent pas la généralité de la solution tant que les limites de contraintes des matériaux résultantes à l'état limite de service sont clairement inférieures à leurs points de plastification (comme l'exige la norme AS3600). Par conséquent, les modèles simplifiés utilisés pour l'état limite de service ne sont valables que si toutes les exigences de vérification sont satisfaites.
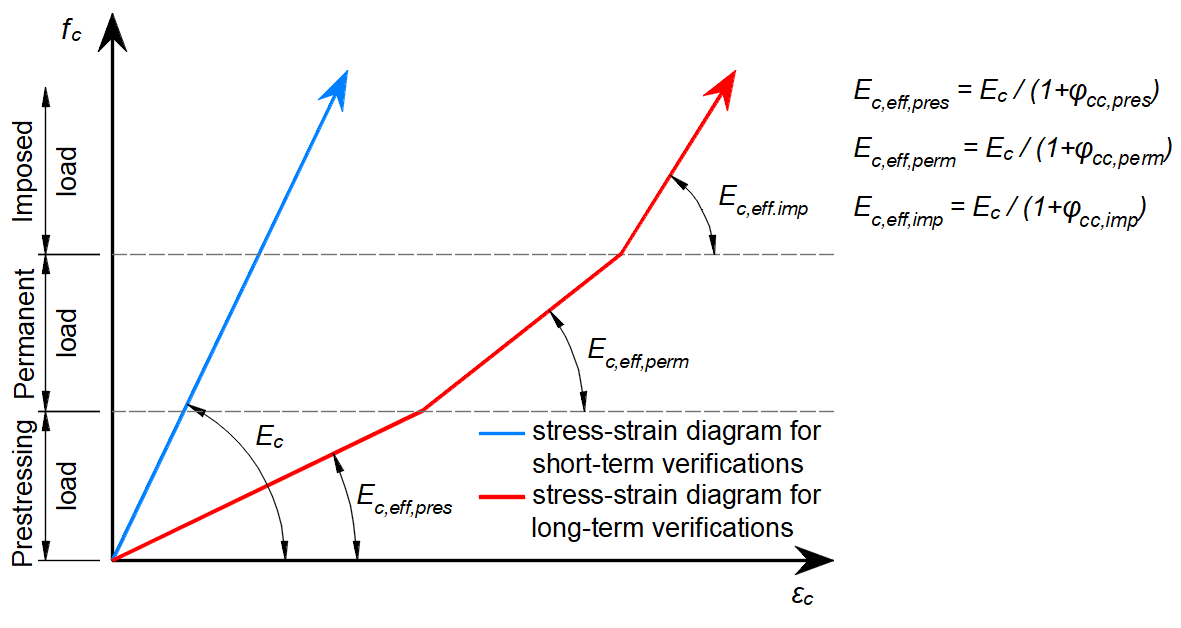
Effets à long terme
Dans l'analyse à l'état limite de service, les effets à long terme du béton sont pris en compte à l'aide du coefficient de fluage de calcul conformément à AS 3600 CL 3.1.8 (φcc, pris par défaut à une valeur de 2,5), qui modifie le module de déformation sécant du béton (Ec) comme suit :
Les incréments de charge sont calculés séquentiellement dans l'ordre suivant : Précontrainte - Permanente - Variable, en utilisant le module de déformation effectif approprié pour chaque incrément comme indiqué à la Fig. 78. Les coefficients de fluage sont définis par l'utilisateur dans les propriétés des matériaux et doivent être calculés conformément à AS 3600 CL 3.1.8.3.
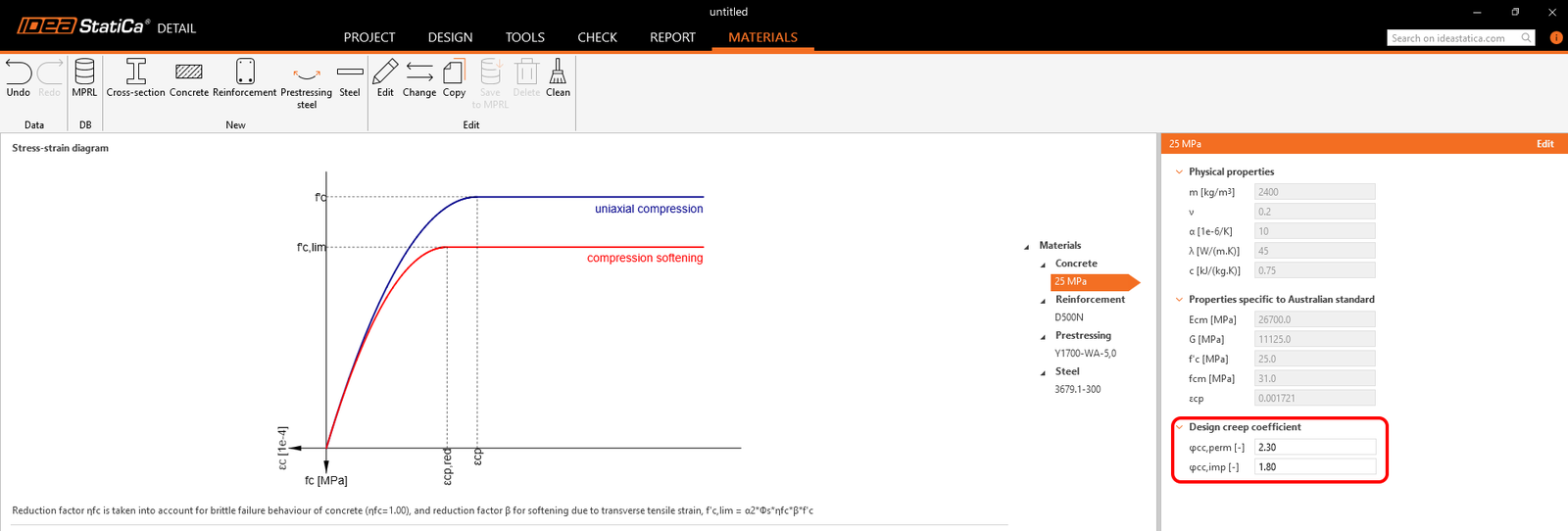
Effets à court terme
Pour effectuer les vérifications à court terme, un autre calcul est réalisé dans lequel toutes les charges sont calculées sans le facteur dépendant du temps pour les charges de longue durée. Les deux calculs pour les vérifications à long et à court terme sont représentés à la Fig. 78.
Ferraillage
Un diagramme contrainte-déformation élasto-plastique parfait avec un point de plastification défini pour le ferraillage non précontraint est considéré, voir AS 3600 Section 3.2. La définition de ce diagramme ne nécessite que la connaissance des propriétés de base du ferraillage – la résistance et le module d'élasticité.
Le diagramme contrainte-déformation du ferraillage peut également être défini par l'utilisateur, mais dans ce cas, il est impossible de supposer l'effet de raidissement en traction (il est impossible de calculer l'ouverture des fissures).
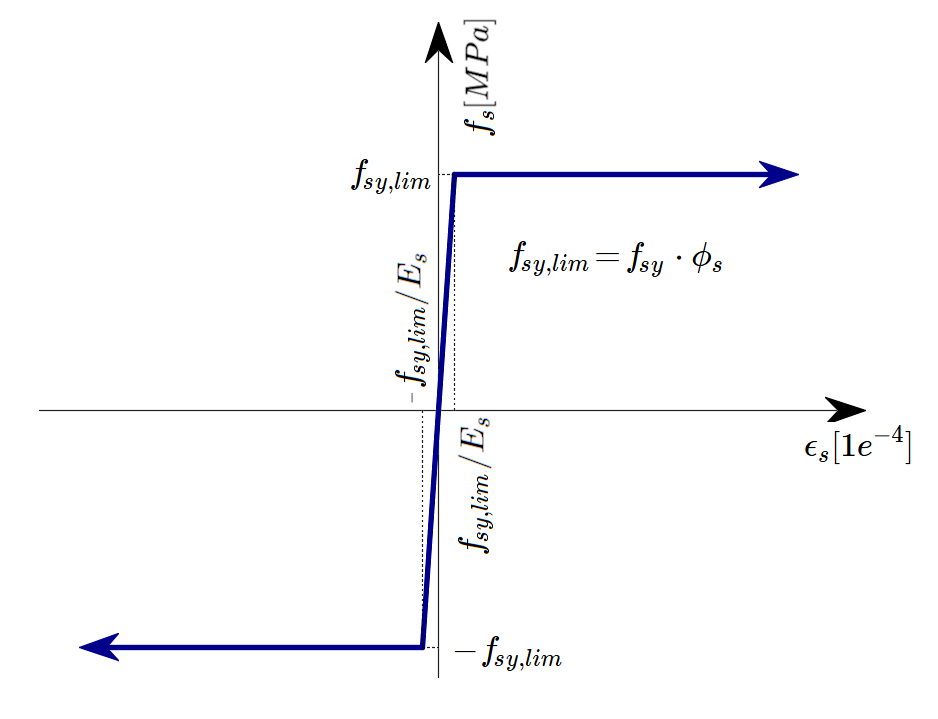
où :
Φs est le facteur de réduction de résistance pour le ferraillage. La valeur par défaut est fixée conformément au Tableau 2.2.3 de la norme AS 3600.
fy est la limite d'élasticité du ferraillage
Es module d'élasticité du ferraillage
Le raidissement en traction (Fig. 81) est pris en compte automatiquement en modifiant la relation contrainte-déformation d'entrée de la barre d'armature nue afin de capturer la rigidité moyenne des barres noyées dans le béton (εm).
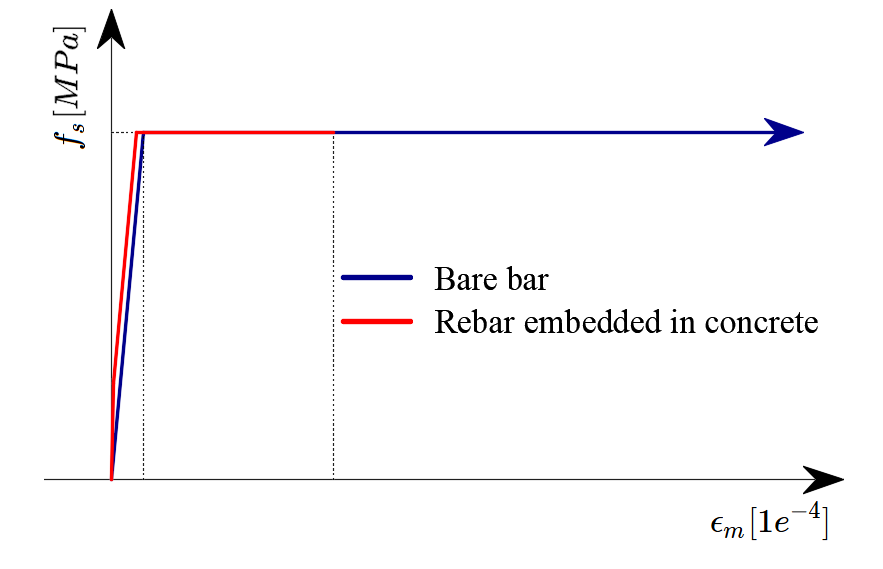
La Méthode du Champ de Contraintes Compatible est conforme aux codes de conception modernes. Étant donné que les modèles de calcul n'utilisent que des propriétés matérielles standard, le format des coefficients partiels de sécurité prescrit dans les codes de conception peut être appliqué sans aucune adaptation. De cette façon, les charges d'entrée sont pondérées et les propriétés caractéristiques des matériaux sont réduites à l'aide des facteurs de réduction des contraintes respectifs, exactement comme dans l'analyse conventionnelle du béton.
Les valeurs des facteurs de réduction des contraintes sont prescrites dans AUS 3600 Cl. 2.2.3. Les valeurs par défaut pour le béton et le ferraillage sont définies conformément au Tableau 2.2.3
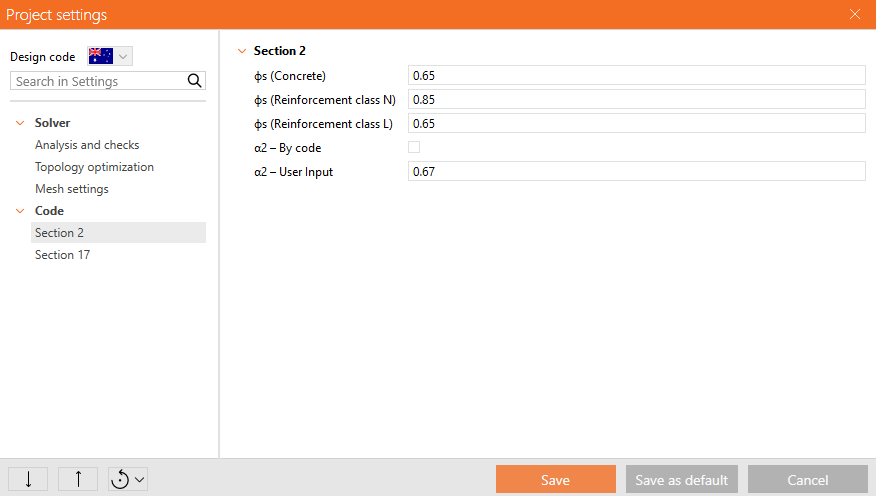
Les facteurs de charge pour les combinaisons de résistance doivent être définis conformément à AS 3600 Cl. 4.2.2. Les facteurs de charge pour les combinaisons de serviceabilité doivent être déterminés conformément au Tableau 4.1. Pour tous les modèles, les facteurs de charge sont déjà prédéfinis.
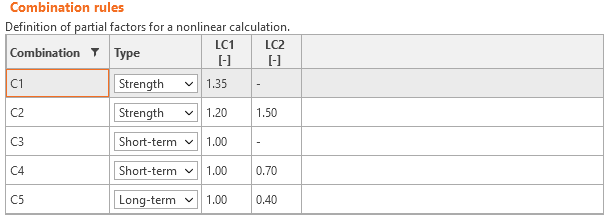
Les différentes vérifications requises par AS 3600 sont évaluées sur la base des résultats directs fournis par le modèle. Les vérifications sont effectuées pour la résistance du béton, la résistance du ferraillage et l'ancrage (contraintes de cisaillement d'adhérence).
La résistance du béton en compression est évaluée comme le rapport entre la contrainte principale maximale de compression fc (également σ2 dans les résultats auxiliaires) obtenue par l'analyse EF et la valeur limite f'c,lim.
La résistance du ferraillage est évaluée en traction et en compression comme le rapport entre la contrainte dans le ferraillage aux fissures fs et la valeur limite spécifiée fsy,lim.
La contrainte de cisaillement d'adhérence est évaluée indépendamment comme le rapport entre la contrainte d'adhérence τb calculée par l'analyse EF et la contrainte d'adhérence ultime de calcul fbu.
Pour la détermination de la contrainte d'adhérence ultime de calcul fbu, la formule C13.1.2.2 définie dans AS3600:2018 Sup 1:2022 est prise en compte dans l'application.
Où f'c ≤ 65 MPa (dans la formule, en MPa), et les facteurs k sont déterminés à partir de AS 3600 Cl. 13.1.2.2 comme suit :
k3 = 0.7 (valeur conservative pour tout le ferraillage)
k2 = (132 - db) / 100 (db est le diamètre de la barre en millimètres)
= 1.3 pour une barre horizontale avec plus de 300 mm de béton coulé sous la barre, ou 1.0 sinon
k1 est automatiquement dérivé de la position du ferraillage dans le modèle et de la direction de bétonnage qui peut être définie dans l'application pour chaque élément de projet comme suit.
La longueur de scellement de base Lsy,tb est calculée selon la formule 13.1.2.2 de AS 3600 comme suit :
Comme on peut le voir dans la formule, la longueur de scellement de base Lsy,tb est limitée par le bas, et par conséquent la contrainte d'adhérence ultime de calcul fbu doit être limitée de la même manière dans l'application, de sorte que ce qui suit s'applique :
Où fsy est en MPa.
La dérivation de la limitation de fbu est la suivante :
Il existe également une option pour modéliser des barres lisses. Plus d'informations peuvent être trouvées ici : Barres lisses dans Detail
Force totale Ftot et force limite Flim
La force totale Ftot est un résultat de l'analyse par éléments finis et peut être définie de deux manières.
où As est l'aire de la barre de ferraillage et fs est la contrainte dans la barre.
Ou comme la somme de la force d'ancrage Fa et de la force d'adhérence Fbond.
où Fa est la force réelle dans le ressort d'ancrage et Fbond est la force d'adhérence qui peut être obtenue en intégrant la contrainte d'adhérence τb sur la longueur de la barre de ferraillage l.
Cs est le périmètre de la barre de ferraillage.
La force limite Flim est la force maximale dans l'élément de la barre en tenant compte de la résistance de la barre ainsi que des conditions d'ancrage (adhérence entre le béton et le ferraillage, crochets d'ancrage, boucles, etc.).
où Cs est le périmètre de la barre de ferraillage, et l est la longueur depuis le début de la barre jusqu'au point d'intérêt.
où Flim,add est la force additionnelle calculée à partir de l'amplitude de l'angle entre les éléments voisins. Flim,2 doit toujours être inférieure à Fu.
Les types d'ancrage disponibles dans CSFM comprennent une barre droite (c'est-à-dire sans réduction d'extrémité d'ancrage), un crochet standard, un crochet standard, une adhérence parfaite et une barre continue. Tous ces types, ainsi que les coefficients d'ancrage β respectifs, sont présentés à la Fig. 86 pour le ferraillage longitudinal. Les valeurs des coefficients d'ancrage adoptés sont dérivées de AS 3600 Cl. 13.1.2. Il convient de noter que le CSFM distingue trois types d'extrémités d'ancrage : (i) aucune réduction de la longueur d'ancrage, (ii) une réduction de 50 % de la longueur d'ancrage dans le cas d'un ancrage normalisé, et (iii) une adhérence parfaite.

Le coefficient d'ancrage pour les étriers est toujours - β = 1.0.
Afin de se conformer à AS 3600, le ressort d'ancrage doit être utilisé dans le calcul ; le ressort d'ancrage est modifié par le coefficient β, de sorte que l'utilisateur doit utiliser l'un des types d'ancrage disponibles lors de la définition des conditions de début et de fin du ferraillage.
Les vérifications à l'état limite de service sont effectuées pour les largeurs de fissures et les limites de flèche.
Flèche
En fonction du type de combinaison sélectionné (long terme ou court terme), la flèche à long terme ou à court terme est évaluée. La valeur maximale admissible de la flèche doit être déterminée par l'utilisateur et doit être considérée conformément à AS 3600 Cl. 2.3.2.

Dans l'application, il est possible d'afficher séparément les flèches dues aux charges permanentes ΔPL et aux charges d'exploitation ΔIL, ainsi que la flèche totale ΔTot (permanentes + exploitation), tout en affichant la déformée.
Les flèches aux extrémités tronquées ne peuvent pas être vérifiées.
Largeur de fissure
Les largeurs de fissures et les orientations des fissures sont calculées pour les combinaisons à l'état limite de service à court terme ou à long terme. La méthode de calcul direct des largeurs de fissures dans l'application est conforme à (basée sur) la méthode donnée dans AS 3600 8.6.2.3.
Les vérifications sont présentées comme suit :
où :
w largeur de fissure à court ou long terme calculée par analyse par éléments finis,
wlim valeur limite de la largeur de fissure définie par l'utilisateur.
Les largeurs de fissures maximales recommandées peuvent être trouvées dans AS3600:2018 Sup 1:2022 Tableau C2.3.3.1.
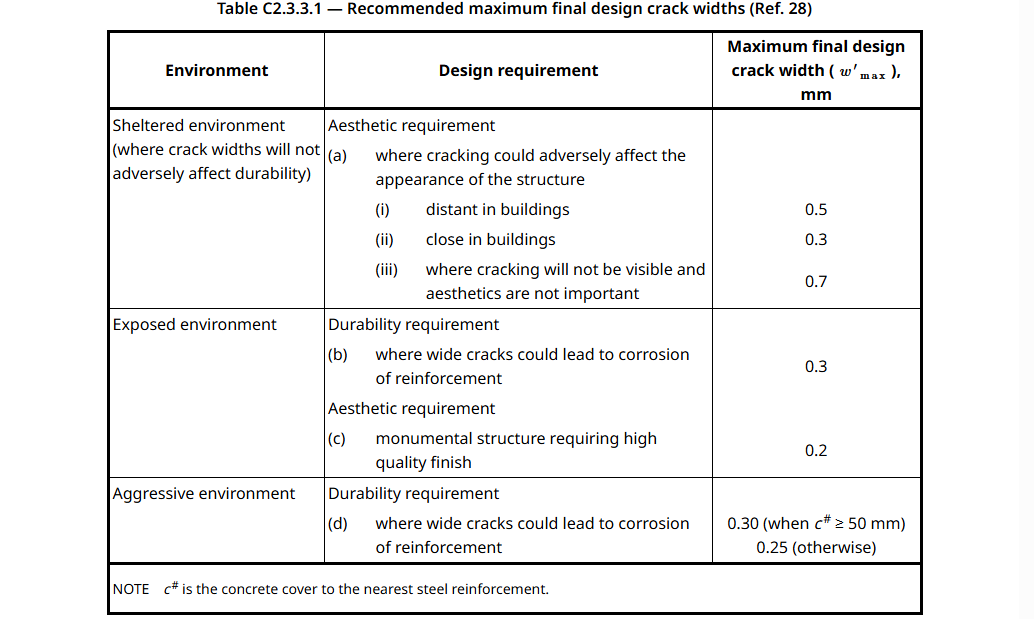
Alternativement, selon AS3600:2018 Sup 1:2022 Cl. C8.6.1 - Pour les structures soumises aux charges de service à long terme, les valeurs recommandées pour wlim sont les suivantes :
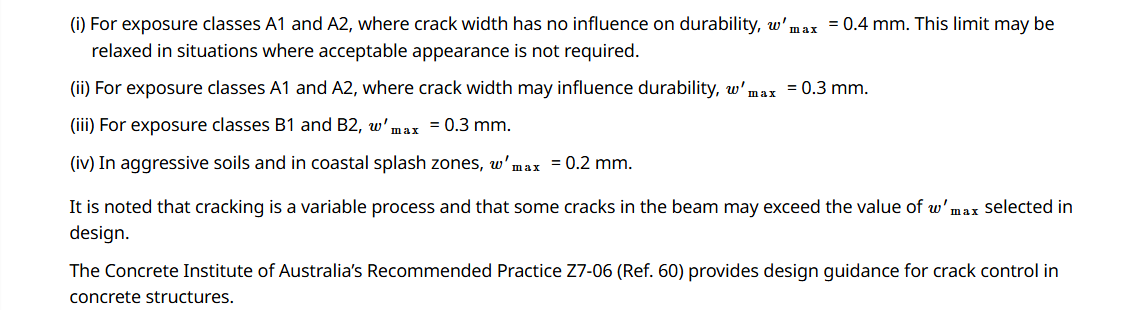
Il existe deux méthodes de calcul des largeurs de fissures (fissuration stabilisée et non stabilisée). Dans le cas général (fissuration stabilisée), la largeur de fissure est calculée en intégrant les déformations sur les éléments 1D des barres de ferraillage. La direction de la fissure est ensuite calculée à partir des trois points d'intégration les plus proches (du centre de l'élément fini 1D de ferraillage considéré) des éléments 2D en béton. Bien que cette approche du calcul des directions de fissures ne corresponde pas à la position réelle des fissures, elle fournit néanmoins des valeurs représentatives conduisant à des résultats de largeur de fissure comparables aux valeurs de largeur de fissure requises par la norme à la position de la barre de ferraillage.
8 Précontrainte - description du modèle
La Méthode du Champ de Contraintes Compatible (CSFM) est une méthode de calcul basée sur les contraintes planes 2D dans laquelle le béton est modélisé à l'aide d'éléments finis 2D auxquels des éléments de ferraillage 1D sont connectés par des contraintes. Des types spéciaux d'éléments 1D représentant le ferraillage de précontrainte adhérent peuvent également être ajoutés au modèle, pouvant être modélisés en pré-tension et en post-tension.
Le ferraillage précontraint est modélisé de manière similaire au ferraillage conventionnel à l'aide d'éléments linéaires transmettant l'effort axial. Chaque élément de ferraillage précontraint est caractérisé par sa section et ses propriétés matérielles. Ces propriétés sont définies par la courbe matérielle caractéristique selon la norme utilisée (EN 1992-1-1, ACI 318-19, etc.)
EUROCODE
Diagramme contrainte-déformation du ferraillage de précontrainte : a) Diagramme contrainte-déformation tel que défini dans EN 1992-1-1 ; b) déformation initiale pour le ferraillage pré-tendu
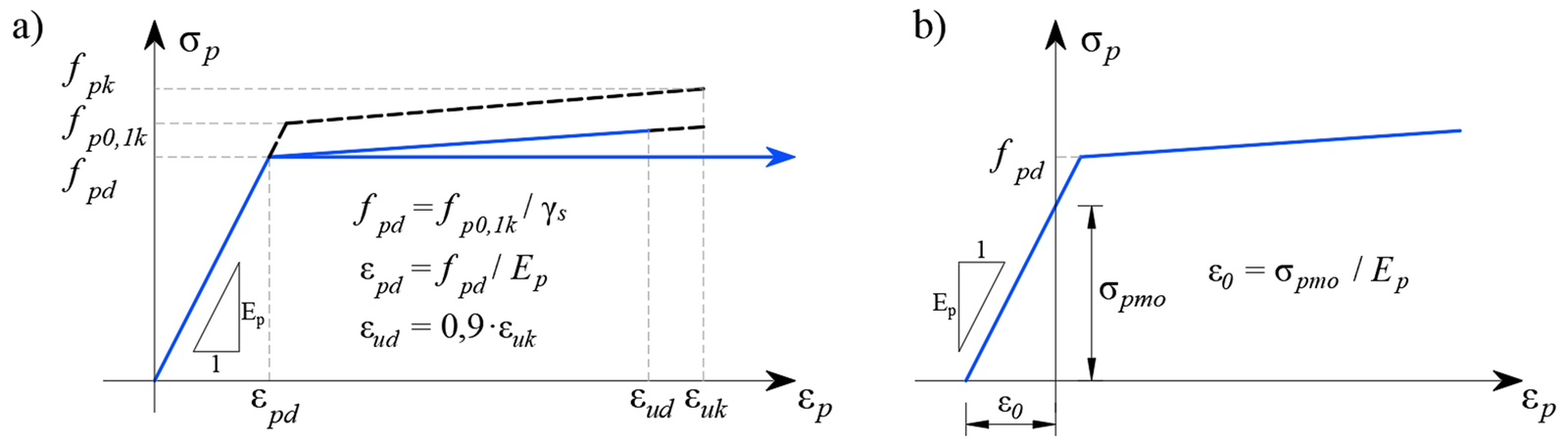
ACI
Diagramme contrainte-déformation du ferraillage de précontrainte : a) Diagramme contrainte-déformation ; b) déformation initiale pour le ferraillage pré-tendu
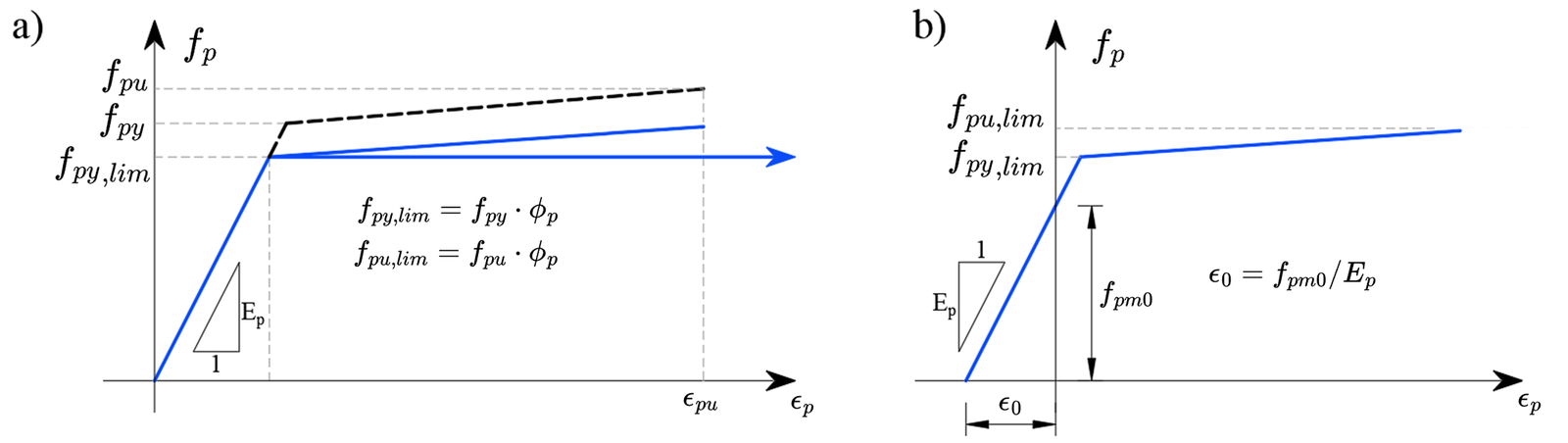
Les éléments de ferraillage sont connectés par un modèle d'adhérence aux éléments 2D du modèle béton de la même manière que le ferraillage béton classique.
Les éléments du modèle d'adhérence permettent la déformation relative du ferraillage précontraint et du béton avec des caractéristiques non linéaires appropriées. Cela modélise correctement la cohésion du ferraillage avec le béton ainsi que le modèle d'ancrage du ferraillage pré-tendu. Les modifications d'extrémité du ferraillage post-tendu, par exemple la plaque d'ancrage, sont modélisées par un élément dont la rigidité correspond à l'ancrage en extrémité du ferraillage de précontrainte, et l'effort de précontrainte en extrémité est appliqué comme une charge surfacique dans le modèle béton sur une surface correspondant à la taille de la plaque d'ancrage. Le modèle ne peut pas décrire correctement l'état de contrainte triaxial local dans la région sous-ancrage, et cette région doit être considérée séparément.
Le raidissement en traction du ferraillage dû aux interactions avec le béton n'est pas pris en compte pour le ferraillage de précontrainte, car le béton au voisinage du ferraillage de précontrainte est supposé être en compression.
Ferraillage pré-tendu
Le ferraillage pré-tendu est mis en précontrainte avant le coulage de l'élément ; le ferraillage de précontrainte est presque toujours tracé en ligne droite, de sorte qu'aucune perte par frottement ne se produit. Une fois la résistance requise du béton atteinte, le ferraillage est libéré des blocs d'ancrage, activant ainsi le ferraillage précontraint et transférant les efforts du ferraillage vers le béton. Cet effet est physiquement équivalent au refroidissement du ferraillage et est modélisé par une déformation initiale similaire à celle d'un chargement thermique. Cela donne un diagramme contrainte-déformation du ferraillage précontraint tel qu'illustré dans la figure ci-dessus en b). Le modèle de calcul détermine automatiquement la réponse en déformation de la structure à la précontrainte appliquée, et détermine donc directement les pertes de précontrainte par déformation élastique de l'élément.
Puisque l'effort de précontrainte est connu, et donc aussi la contrainte de précontrainte σpmo, le diagramme matériel du ferraillage est utilisé pour la dépendance de la contrainte à la déformation et peut s'écrire :
En supposant que la précontrainte dans le ferraillage est inférieure à la limite d'élasticité (c'est-à-dire que les conditions définies dans EN 1992-1-1, chapitre 5.10.3 sont satisfaites), la déformation initiale peut également être calculée comme :
ε0 - déformation initiale due à la précontrainte
σpm0 - contrainte juste avant la mise en liberté
Ep - module d'élasticité du ferraillage de précontrainte
Le ferraillage pré-tendu est spécifique en ce que son ancrage aux extrémités est assuré par plusieurs mécanismes différents : l'adhésion du ferraillage et du béton au niveau moléculaire, le frottement généré à l'interface entre la surface du ferraillage et le béton, l'enfoncement mécanique du ferraillage spiralé dans le béton, et l'augmentation du diamètre du ferraillage de précontrainte connue sous le nom d'effet de coin ou effet Hoyer. Les effets susmentionnés sont inclus dans le modèle de calcul CSFM en modifiant les propriétés du modèle d'ancrage dans la zone d'extrémité du ferraillage pré-tendu.
Interaction entre le ferraillage pré-tendu et le béton : a) enfoncement du ferraillage spiralé dans le béton ; b) effet Hoyer
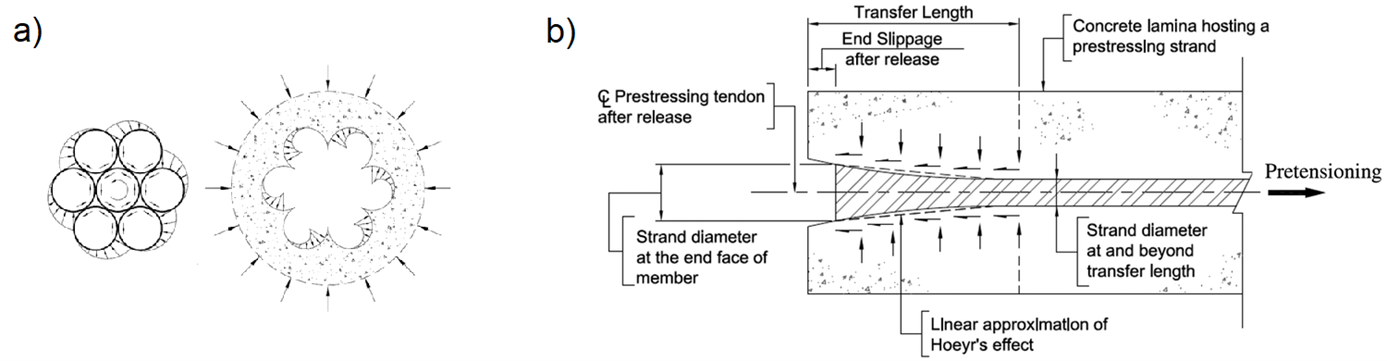
Ferraillage post-tendu
Le ferraillage post-tendu est mis en précontrainte après le coulage de la structure. Le dispositif de précontrainte prend appui directement dans la structure, éliminant ainsi les pertes dues à la déformation élastique de la structure sous l'effet de la précontrainte. Une fois l'effort de précontrainte souhaité atteint, le ferraillage est ancré, puis les gaines sont injectées, assurant ainsi l'adhérence du ferraillage avec la structure. Lors de la modélisation du ferraillage post-tendu, le calcul est donc divisé en plusieurs étapes de chargement : mise en précontrainte, application des autres charges permanentes et application des charges variables.
Maillage béton en éléments finis avec éléments de ferraillage de précontrainte 1D attachés :
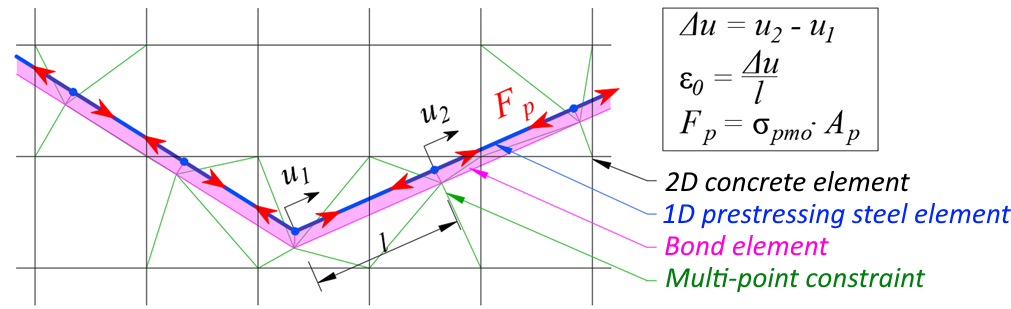
Étape de chargement « mise en précontrainte »
Lors de la mise en précontrainte du ferraillage, la rigidité du ferraillage n'est pas intégrée dans la rigidité de la structure. Dans cette étape de chargement, la rigidité de l'élément linéaire n'est pas prise en compte dans le modèle ; les éléments de ferraillage sont remplacés par une charge de substitution correspondant à la contrainte de précontrainte et à la section du ferraillage, comme illustré dans la figure ci-dessus. Après avoir atteint la charge totale due à la précontrainte et la convergence de cette étape de chargement, la déformation de l'élément linéaire spécifique est relevée ; sur la base de cette déformation, la déformation initiale ε0 des éléments linéaires individuels du ferraillage de précontrainte est déterminée.
La contrainte de précontrainte peut être définie manuellement le long de la longueur du ferraillage ou calculée automatiquement en fonction de la géométrie du ferraillage. Si le calcul automatique des pertes est choisi, les pertes par frottement (selon EN 1992-1-1, 5.10.5.2, ou ACI 318-19, 20.3.2) et le glissement du ferraillage (enfoncement des clavettes d'ancrage) lors de l'ancrage sont pris en compte. Comme tout le ferraillage de précontrainte est appliqué en une seule étape, les pertes par mise en tension successive ne sont pas prises en compte.
Étapes de chargement ultérieures avec le ferraillage de précontrainte activé
Dans les étapes de chargement suivantes (application des autres charges permanentes et variables), la même procédure est suivie que pour le ferraillage pré-tendu. La rigidité totale du ferraillage précontraint est prise en compte, l'adhérence entre le ferraillage et le béton environnant est considérée, et le diagramme contrainte-déformation du ferraillage précontraint est modifié par la déformation initiale ε0. Cette déformation est différente pour chaque élément et a été obtenue à partir de l'étape de chargement précédente « mise en précontrainte ». Grâce à l'adhérence du ferraillage et du béton, la variation de précontrainte due à la déformation élastique de la structure sous charge extérieure est correctement prise en compte dans le modèle.
Références
ACI Committee 318. 2019. Building Code Requirements for Structural Concrete (ACI 318-19) and Commentary. Farmington Hills, MI: American Concrete Institute.
Alvarez, Manuel. 1998. Einfluss des Verbundverhaltens auf das Verformungsvermögen von Stahlbeton. IBK Bericht 236. Basel: Institut für Baustatik und Konstruktion, ETH Zurich, Birkhäuser Verlag.
Beeby, A. W. 1979. "The Prediction of Crack Widths in Hardened Concrete." The Structural Engineer 57A (1): 9–17.
Broms, Bengt B. 1965. "Crack Width and Crack Spacing In Reinforced Concrete Members." ACI Journal Proceedings 62 (10): 1237–56. https://doi.org/10.14359/7742.
Burns, C.. 2012. "Serviceability Analysis of Reinforced Concrete Members Based on the Tension Chord Model." IBK Report Nr. 342, Zurich, Switzerland: ETH Zurich.
Crisfield, M. A. 1997. Non-Linear Finite Element Analysis of Solids and Structures. Wiley.
European Committee for Standardization (CEN). 2015. 1 Eurocode 2: Design of concrete structures - Part 1-1: General rules and rules for buildings. Brussels: CEN, 2005.
Fernández Ruiz, M., and A. Muttoni. 2007. "On Development of Suitable Stress Fields for Structural Concrete." ACI Structural Journal 104 (4): 495–502.
Kaufmann, W., J. Mata-Falcón, M. Weber, T. Galkovski, D. Thong Tran, J. Kabelac, M. Konecny, J. Navratil, M. Cihal, and P. Komarkova. 2020. "Compatible Stress Field Design Of Structural Concrete. Berlin, Germany."AZ Druck und Datentechnik GmbH, ISBN 978-3-906916-95-8.
Kaufmann, W., and P. Marti. 1998. "Structural Concrete: Cracked Membrane Model." Journal of Structural Engineering 124 (12): 1467–75. https://doi.org/10.1061/(ASCE)0733-9445(1998)124:12(1467).
Kaufmann, W.. 1998. "Strength and Deformations of Structural Concrete Subjected to In-Plane Shear and Normal Forces." Doctoral dissertation, Basel: Institut für Baustatik und Konstruktion, ETH Zürich. https://doi.org/10.1007/978-3-0348-7612-4.
Konečný, M., J. Kabeláč, and J. Navrátil. 2017. Use of Topology Optimization in Concrete Reinforcement Design. 24. Czech Concrete Days (2017). ČBS ČSSI. https://resources.ideastatica.com/Content/06_Detail/Verification/Articles/Topology_optimization_US.pdf.
Marti, P. 1985. "Truss Models in Detailing." Concrete International 7 (12): 66–73.
Marti, P. 2013. Theory of Structures: Fundamentals, Framed Structures, Plates and Shells. First edition. Berlin, Germany: Wiley Ernst & Sohn.
http://sfx.ethz.ch/sfx_locater?sid=ALEPH:EBI01&genre=book&isbn=9783433029916.
Marti, P., M.Alvarez, W. Kaufmann, and V. Sigrist. 1998. "Tension Chord Model for Structural Concrete." Structural Engineering International 8 (4): 287–298.
https://doi.org/10.2749/101686698780488875.
Mata-Falcón, J. 2015. "Serviceability and Ultimate Behaviour of Dapped-End Beams (In Spanish: Estudio Del Comportamiento En Servicio y Rotura de Los Apoyos a Media Madera)." PhD thesis, Valencia: Universitat Politècnica de València.
Meier, H. 1983. "Berücksichtigung Des Wirklichkeitsnahen Werkstoffverhaltens Beim Standsicherheitsnachweis Turmartiger Stahlbetonbauwerke." Institut für Massivbau, Universität Stuttgart.
Navrátil, J., P. Ševčík, L. Michalčík, P. Foltyn, and J. Kabeláč. 2017. A Solution for Walls and Details of Concrete Structures. 24. Czech Concrete Days.
Schlaich, J., K. Schäfer, and M. Jennewein. 1987a. "Toward a Consistent Design of Structural Concrete." PCI Journal 32 (3): 74–150.
Standards Australia. 2018. Concrete Structures (AS 3600:2018). Sydney, NSW: Standards Australia.
Standards Australia. 2022. Concrete Structures – Commentary (Supplement 1 to AS 3600:2018). Sydney, NSW: Standards Australia.
Vecchio, F.J., and M.P. Collins. 1986. "The Modified Compression Field Theory for Reinforced Concrete Elements Subjected to Shear." ACI Journal 83 (2): 219–31.