Baza teoretică se întemeiază pe COMPATIBLE STRESS FIELD DESIGN OF STRUCTURAL CONCRETE
(Kaufmann et al., 2020)
Proiectarea structurală a discontinuităților din beton în IDEA StatiCa Detail
1 Introducere în metoda CSFM
1.1 Introducere generală pentru proiectarea structurală a detaliilor din beton
1.2 Ipoteze principale și limitări
1.3 Instrumente de proiectare pentru armătură
2 Modelul de analiză al IDEA StatiCa Detail
2.1 Introducere în implementarea cu elemente finite
2.2 Reazeme și componente de transmitere a încărcărilor
2.3 Transferul încărcărilor la capetele decupate ale grinzilor
2.4 Modificarea geometrică a secțiunilor transversale
2.5 Tipuri de elemente finite
2.6 Discretizarea în plasă
2.7 Metoda de rezolvare și algoritmul de control al încărcării
2.8 Prezentarea rezultatelor
3 Verificarea modelului
3.1 Stări limită, calculul deschiderii fisurilor și participarea betonului întins
4 Verificări structurale conform EUROCODE
4.1 Modele de materiale (EN)
4.2 Factori de siguranță
4.3 Analiza la starea limită ultimă
4.4 Zone parțial încărcate (PLA)
4.5 Analiza la starea limită de serviciu
5 Verificări structurale conform ACI 318-19
5.1 Modele de materiale (ACI)
5.2 Factori de reducere a rezistenței și factori de încărcare
5.3 Verificări ale rezistenței
5.4 Zone de reazem și ancoraj - Zone parțial încărcate
5.5 Verificări la starea limită de serviciu
6 Verificări structurale conform AASHTO
6.1 Modele de materiale (AASHTO)
6.2 Factori de rezistență și de încărcare
6.3 Starea limită de rezistență
6.4 Rezistența zonelor de reazem și ancoraj – Zone parțial încărcate
6.5 Starea limită de serviciu
7 Verificări structurale conform AS 3600
7.1 Modele de materiale (AUS)
7.2 Factori de reducere a tensiunilor și factori de încărcare
7.3 Verificări ale rezistenței și ancorajului
7.4 Verificări la starea limită de serviciu
8 Pretensionare în Detail - Descrierea modelului
1 Introducere în metoda CSFM
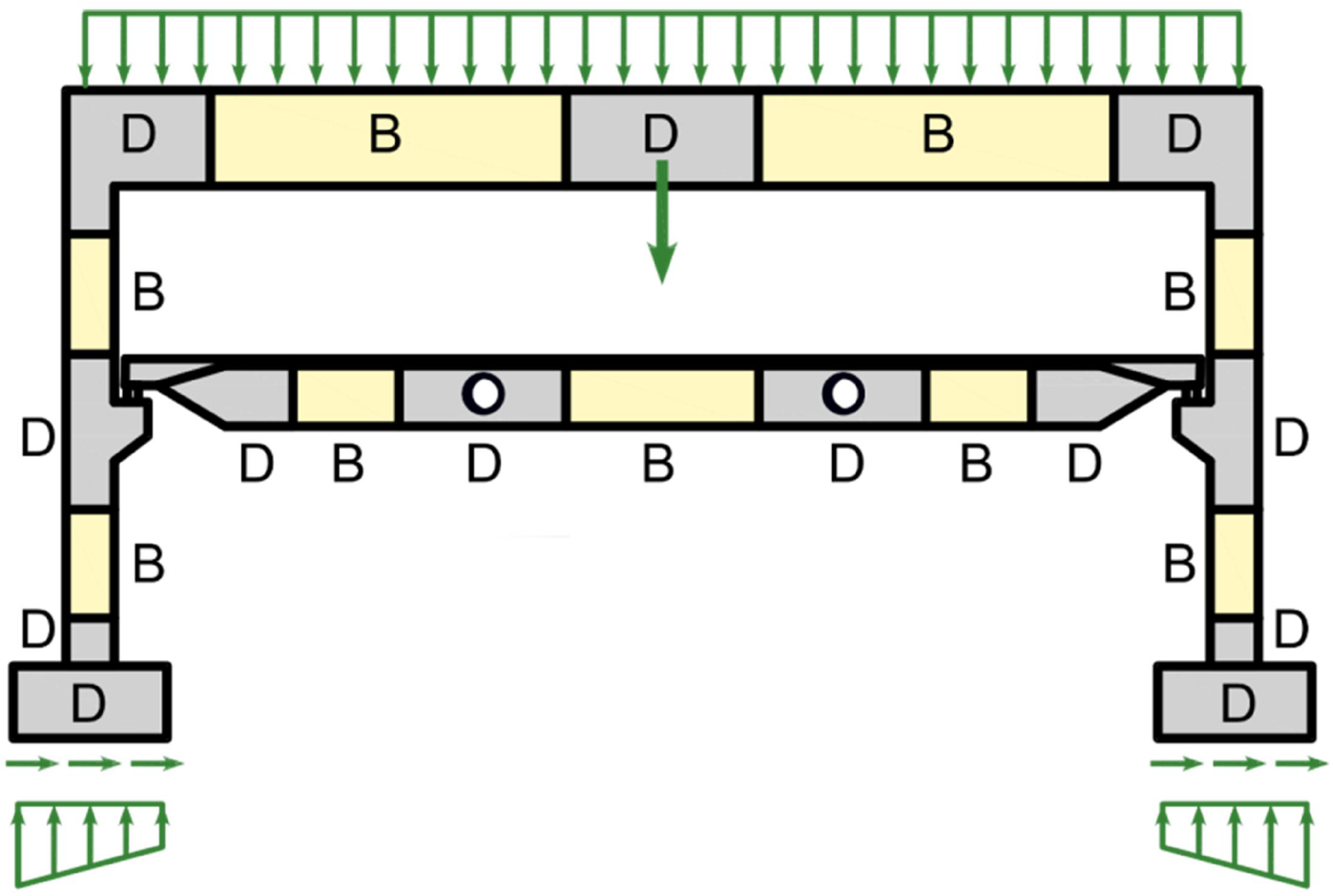
Proiectarea și evaluarea elementelor de beton se realizează în mod obișnuit la nivel secțional (element 1D) sau punctual (element 2D). Această procedură este descrisă în toate standardele de calcul structural, de exemplu în (EN 1992-1-1 sau ACI 318-19), și este utilizată în practica curentă de inginerie structurală. Cu toate acestea, nu este întotdeauna cunoscut sau respectat faptul că procedura este acceptabilă doar în zonele în care se aplică ipoteza Bernoulli-Navier a distribuției plane a deformațiilor (denumite zone B). Locurile în care această ipoteză nu se aplică sunt numite regiuni de discontinuitate sau regiuni perturbate (zone D). Exemple de zone B și D ale elementelor 1D sunt prezentate în (Fig. 1). Acestea sunt, de exemplu, zone de reazem, porțiuni unde se aplică încărcări concentrate, locații unde apare o schimbare bruscă a secțiunii transversale, goluri etc. La proiectarea structurilor de beton, întâlnim și multe alte zone D, cum ar fi pereți, diafragme de pod, console etc.
În trecut, pentru dimensionarea regiunilor de discontinuitate se utilizau reguli de proiectare semi-empirice. Din fericire, aceste reguli au fost în mare parte înlocuite în ultimele decenii de modelele Bielă-tiranți (Schlaich et al., 1987) și câmpurile de tensiuni (Marti 1985), care sunt incluse în codurile de proiectare actuale și frecvent utilizate de proiectanți în prezent. Aceste modele sunt instrumente coerente din punct de vedere mecanic și foarte eficiente. De remarcat că câmpurile de tensiuni pot fi în general continue sau discontinue și că modelele Bielă-tiranți reprezintă un caz special al câmpurilor de tensiuni discontinue.
În ciuda evoluției instrumentelor de calcul din ultimele decenii, modelele Bielă-tiranți sunt în esență utilizate în continuare ca metode de calcul manual. Aplicarea lor pentru structuri reale este laborioasă și consumatoare de timp, deoarece sunt necesare iterații și trebuie luate în considerare mai multe combinații de încărcări. Mai mult, această metodă nu este adecvată pentru verificarea criteriilor de stare limită de serviciu (deformații, deschideri ale fisurilor etc.).
Interesul inginerilor structuriști pentru un instrument fiabil și rapid de proiectare a zonelor D a condus la decizia de a dezvolta noua Metodă a Câmpului de Tensiuni Compatibil, o metodă de proiectare asistată de calculator a câmpurilor de tensiuni, care permite proiectarea și evaluarea automată a elementelor de beton structural supuse la încărcări în plan.
Metoda Câmpului de Tensiuni Compatibil (CSFM) este o metodă continuă de analiză a câmpurilor de tensiuni bazată pe elemente finite, în care soluțiile clasice ale câmpurilor de tensiuni sunt completate cu considerații cinematice, adică starea de deformație este evaluată în întreaga structură. Astfel, rezistența efectivă la compresiune a betonului poate fi calculată automat pe baza stării de deformație transversală, într-un mod similar cu analizele câmpului de compresiune care iau în considerare rezistența redusă a betonului comprimat (Vecchio și Collins 1986; Kaufmann și Marti 1998) și metoda EPSF (Fernández Ruiz și Muttoni 2007). Mai mult, CSFM ia în considerare participarea betonului întins, oferind rigidități realiste elementelor, și acoperă toate prescripțiile codurilor de proiectare (inclusiv aspectele de stare limită de serviciu și capacitate de deformație) care nu sunt abordate în mod consecvent de abordările anterioare. CSFM utilizează legi constitutive uniaxiale uzuale, furnizate de standardele de proiectare pentru beton și armătură. Acestea sunt cunoscute în faza de proiectare, ceea ce permite utilizarea metodei coeficienților parțiali de siguranță. Prin urmare, proiectanții nu trebuie să furnizeze proprietăți de material suplimentare, adesea arbitrare, cum sunt cele solicitate în mod tipic pentru analizele neliniare cu elemente finite, ceea ce face metoda perfect adecvată pentru practica inginerească.
Pentru a promova utilizarea câmpurilor de tensiuni asistate de calculator de către inginerii structuriști, aceste metode ar trebui implementate în medii software prietenoase cu utilizatorul. În acest scop, CSFM a fost implementat în IDEA StatiCa Detail; un nou software comercial ușor de utilizat, dezvoltat în comun de ETH Zurich și compania de software IDEA StatiCa în cadrul proiectului DR-Design Eurostars-10571.
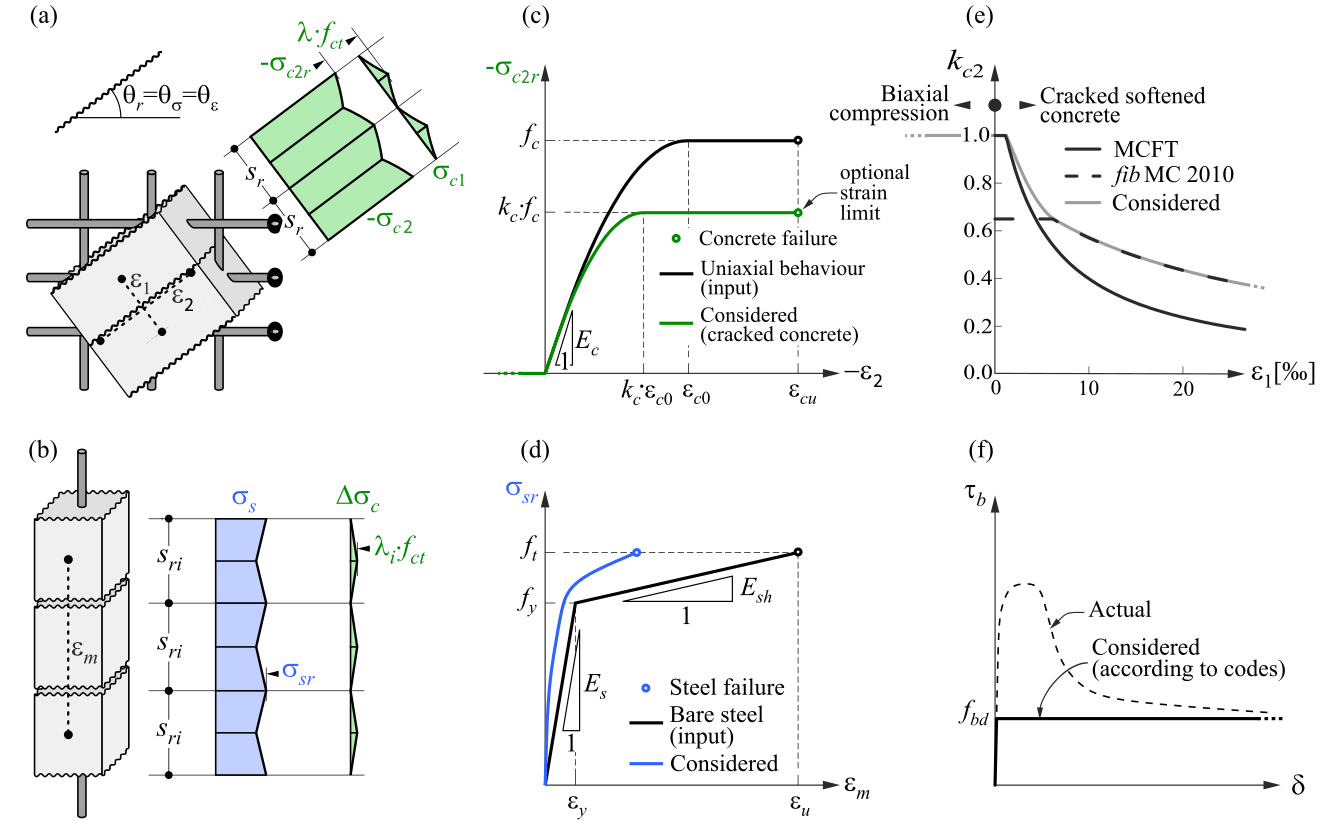
CSFM consideră tensiunea principală maximă a betonului la compresiune (σc2r) și tensiunile din armătură (σsr) la fisuri, neglijând rezistența la întindere a betonului (σc1r = 0), cu excepția participarea betonului întins asupra armăturii. Luarea în considerare a participarea betonului întins permite simularea deformațiilor medii ale armăturii (εm). Se consideră fisuri fictive, rotitoare, fără tensiuni, care se deschid fără alunecare (Fig. 2a), iar echilibrul la fisuri împreună cu deformațiile medii ale armăturii este de asemenea luat în considerare.
În ciuda simplității lor, ipoteze similare au demonstrat că produc predicții precise pentru elementele armate supuse la încărcări în plan (Kaufmann 1998; Kaufmann și Marti 1998), dacă armătura prevăzută evită cedările fragile la fisurare. Mai mult, neluarea în considerare a oricărei contribuții a rezistenței la întindere a betonului la capacitatea ultimă este consecventă cu principiile codurilor moderne de proiectare, care se bazează în mare parte pe teoria plasticității.
Cu toate acestea, CSFM nu este potrivit pentru elementele zvelte fără armătură transversală, deoarece mecanismele relevante pentru astfel de elemente — angrenajul agregatelor, tensiunile reziduale de întindere la vârful fisurii și efectul de dorn — toate bazându-se direct sau indirect pe rezistența la întindere a betonului — sunt ignorate. Deși unele standarde de proiectare permit proiectarea unor astfel de elemente pe baza unor prevederi semi-empirice, CSFM nu este destinat acestui tip de structuri potențial fragile.
Beton
Modelul de beton implementat în CSFM se bazează pe legile constitutive uniaxiale la compresiune prescrise de codurile de proiectare pentru calculul secțiunilor transversale, care depind doar de rezistența la compresiune. Diagrama parabolă-dreptunghi (Fig. 2c) este utilizată implicit în CSFM, dar proiectanții pot alege și o relație elastic-perfect plastică mai simplificată. La verificarea conform codului ACI, este posibilă utilizarea exclusivă a diagramei efort-deformație parabolă-dreptunghi. Așa cum s-a menționat anterior, rezistența la întindere este neglijată, ca și în proiectarea clasică a betonului armat.
Rezistența efectivă la compresiune este evaluată automat pentru betonul fisurat pe baza deformației principale de întindere (ε1) prin intermediul factorului de reducere kc2, după cum se arată în Fig. 2c și e. Relația de reducere implementată (Fig. 2e) este o generalizare a propunerii fib Model Code 2010 pentru verificările la forfecare, care conține o valoare limită de 0,65 pentru raportul maxim dintre rezistența efectivă a betonului și rezistența la compresiune a betonului, care nu este aplicabilă altor cazuri de încărcare.
CSFM în IDEA StatiCa Detail nu consideră un criteriu explicit de cedare în termeni de deformații pentru betonul la compresiune (adică, consideră o ramură infinit plastică după atingerea tensiunii de vârf). Această simplificare nu permite verificarea capacității de deformare a structurilor care cedează la compresiune. Cu toate acestea, capacitatea ultimă este corect estimată atunci când, pe lângă factorul betonului fisurat (kc2) definit în (Fig. 2e), creșterea fragilității betonului odată cu creșterea rezistenței sale este considerată prin intermediul factorului de reducere definit în fib Model Code 2010 după cum urmează:
unde:
kc este factorul global de reducere a rezistenței la compresiune
kc2 este factorul de reducere datorat prezenței fisurării transversale
fc este rezistența caracteristică pe cilindru a betonului (în MPa pentru definiția ).
Există de asemenea o reducere a factorului kc2 din motive de stabilitate a calculului. Această reducere nu influențează rezistența totală a elementelor. Considerând valoarea fcd ca rezistența de calcul a betonului (valoare de calcul), valoarea kc2 este redusă conform următoarelor reguli.
σc2r < 0.11fcd kc2=1.0
0.11fcd < σc2r < 0.37fcd kc2 este o interpolare liniară între 1,0 și valoarea preluată din
graficul din Fig. 2f
σc2r > 0.37fcd kc2 este preluat direct din graficul din Fig. 2f
Armătură
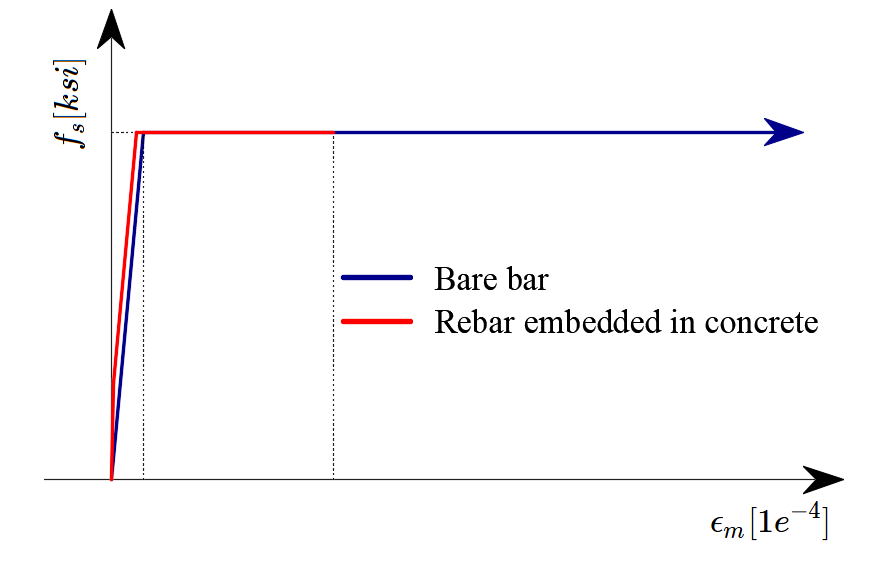
Se consideră diagrama bilineară idealizată efort-deformație pentru barele de armătură neîncorporate, definită în mod tipic de codurile de proiectare (Fig. 2d). Definirea acestei diagrame necesită cunoașterea doar a proprietăților de bază ale armăturii în faza de proiectare (rezistență și clasă de ductilitate). Poate fi definită și o relație efort-deformație definită de utilizator.
Participarea betonului întins este luată în considerare prin modificarea relației efort-deformație de intrare a barei de armătură neîncorporate, pentru a surprinde rigiditatea medie a barelor înglobate în beton (εm).
Modelul de aderență
Alunecarea dintre armătură și beton este introdusă în modelul cu elemente finite prin considerarea relației constitutive simplificate rigid-perfect plastice prezentate în Fig. 2f, unde fbd este valoarea de calcul (valoarea factorizată) a tensiunii ultime de aderență specificată de codul de proiectare pentru condițiile specifice de aderență.
Acesta este un model simplificat cu unicul scop de a verifica prescripțiile de aderență conform codurilor de proiectare (adică, lungimea de ancoraj a armăturii). Reducerea lungimii de ancoraj la utilizarea cârligelor, buclelor și a formelor similare de bare poate fi considerată prin definirea unei anumite capacități la capătul armăturii, după cum va fi descris în continuare.
Flux de lucru și obiective
Scopul instrumentelor de proiectare a armăturii în CSFM este de a ajuta proiectanții să determine locația și cantitatea necesară de bare de armătură în mod eficient. Următoarele instrumente sunt disponibile pentru a ajuta/ghida utilizatorul în acest proces: calculul liniar și optimizarea topologică.
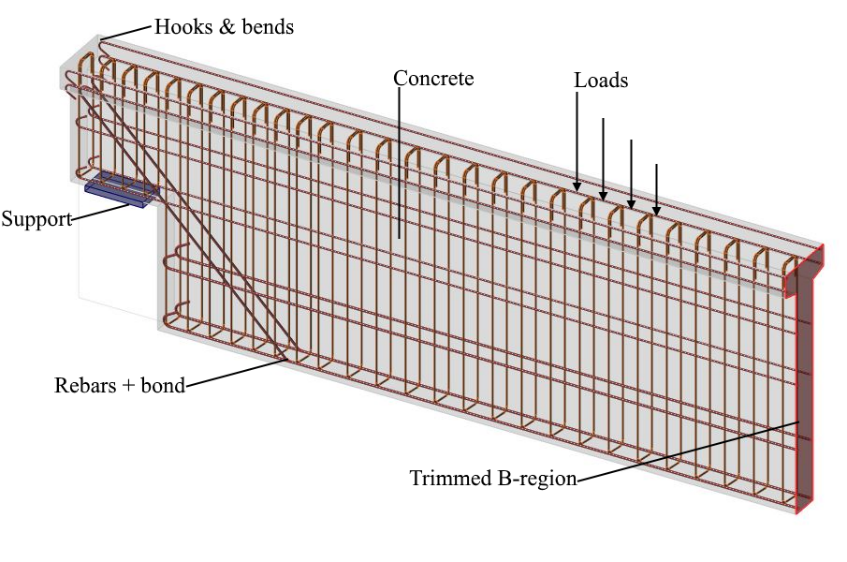
Instrumentele de proiectare a armăturii utilizează modele constitutive mai simplificate decât modelele folosite pentru verificarea finală a structurii. Prin urmare, definirea armăturii în această etapă trebuie considerată un pre-proiect care urmează să fie confirmat/rafinat în etapa de verificare finală. Utilizarea diferitelor instrumente de proiectare a armăturii va fi ilustrată pe modelul prezentat în Fig. 3, care constă dintr-un capăt al unei grinzi simplu rezemate cu înălțime variabilă, supusă unei încărcări uniform distribuite.
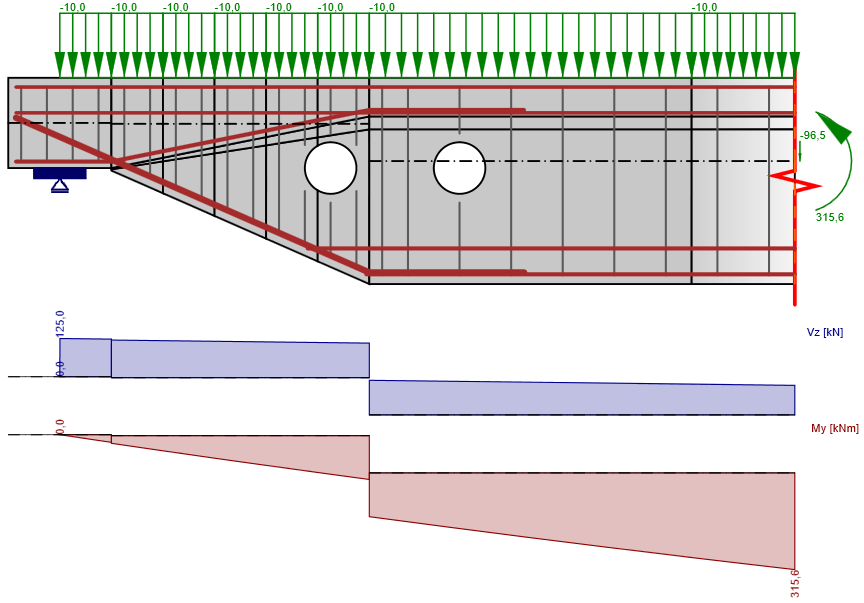
Analiză liniară
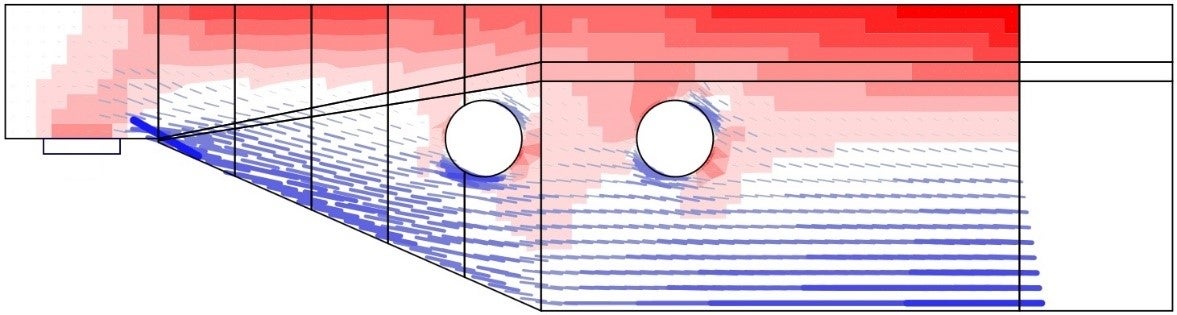
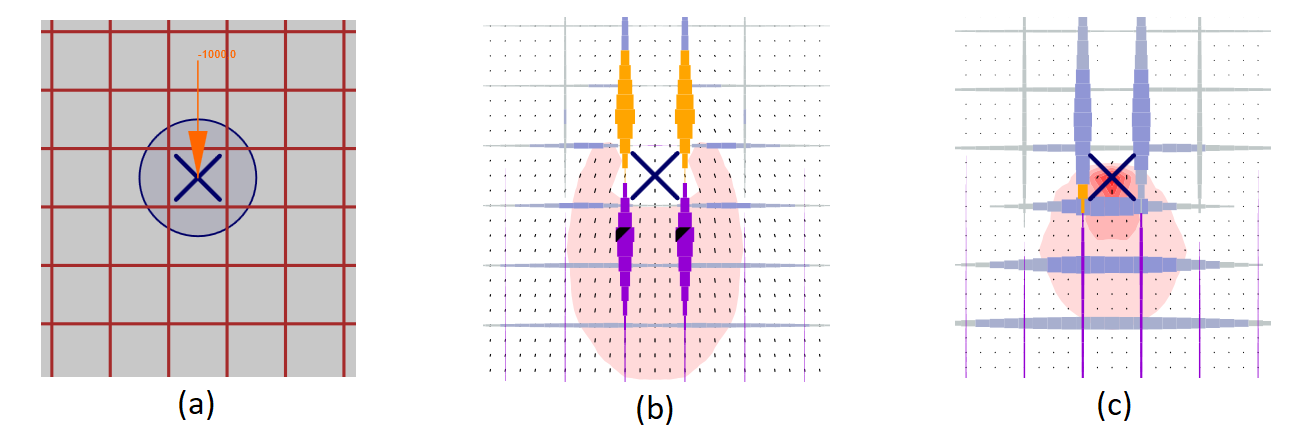
Analiza liniară consideră proprietăți de material liniar elastice și neglijează armătura în zona de beton. Prin urmare, este un calcul foarte rapid care oferă o primă imagine a locațiilor zonelor de întindere și compresiune. Un exemplu al unui astfel de calcul este prezentat în Fig. 4.
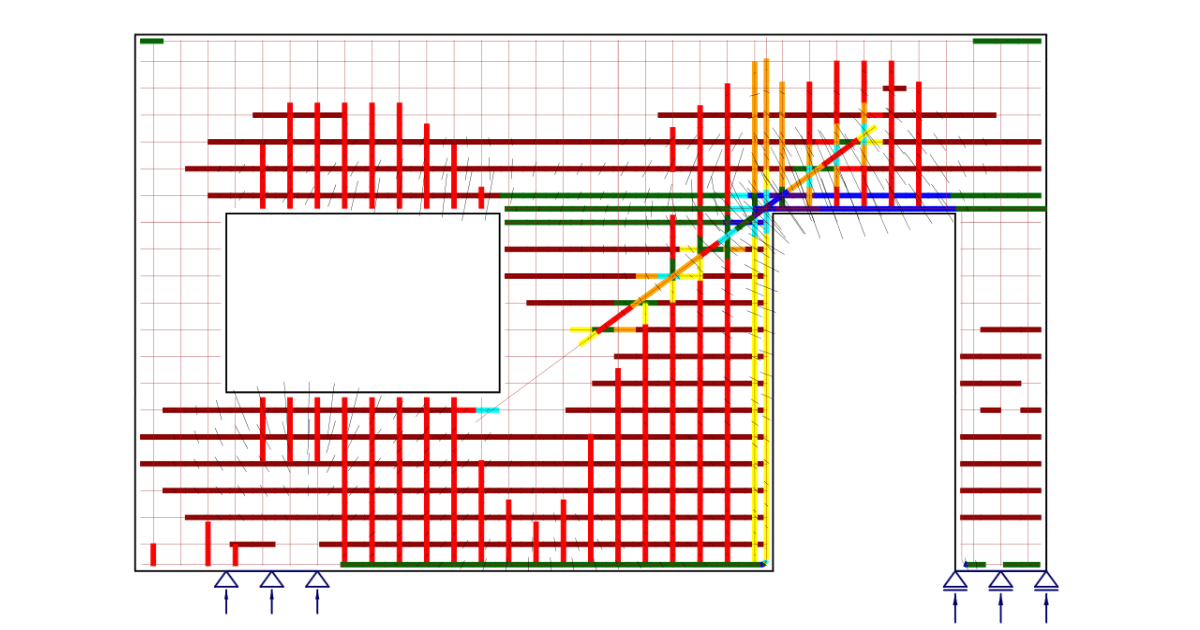
Optimizare topologică
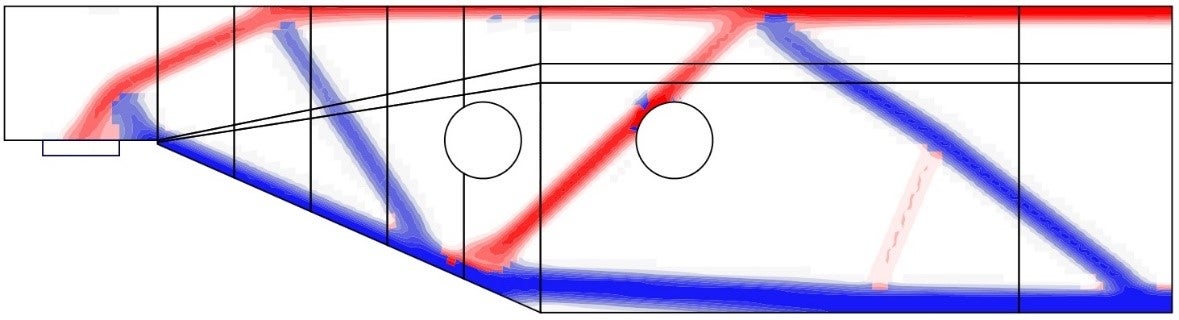
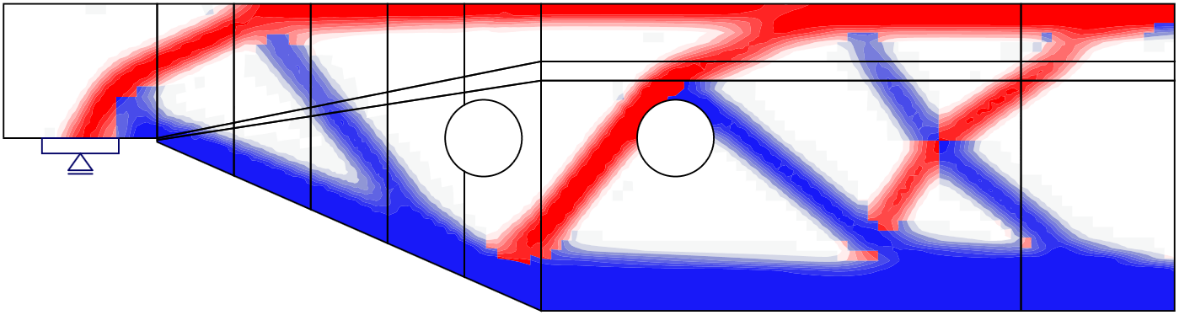
Optimizarea topologică este o metodă care urmărește să găsească distribuția optimă a materialului într-un volum dat pentru o anumită configurație de încărcare. Optimizarea topologică implementată în Idea StatiCa Detail utilizează un model cu elemente finite liniar. Fiecare element finit poate avea o densitate relativă de la 0 la 100%, reprezentând cantitatea relativă de material utilizat. Aceste densități ale elementelor sunt parametrii de optimizare în problema de optimizare. Distribuția rezultată a materialului este considerată optimă pentru setul dat de încărcări dacă minimizează energia totală de deformație a sistemului. Prin definiție, distribuția optimă este, de asemenea, geometria care are cea mai mare rigiditate posibilă pentru încărcările date.
Procesul iterativ de optimizare începe cu o distribuție omogenă a densității. Calculul este efectuat pentru mai multe fracțiuni de volum total (20%, 40%, 60% și 80%), ceea ce permite utilizatorului să selecteze rezultatul cel mai practic. Forma rezultată constă din grinzi cu zăbrele cu biele și tiranți și reprezintă forma optimă pentru cazurile de încărcare date (Fig. 5).
2 Modelul de analiză al IDEA StatiCa Detail
CSFM consideră câmpuri de tensiuni continue în beton (elemente finite 2D), completate de elemente discrete de tip „bară" care reprezintă armătura (elemente finite 1D). Prin urmare, armătura nu este înglobată difuz în elementele finite 2D de beton, ci este modelată explicit și conectată la acestea. În modelul de calcul se consideră o stare plană de tensiuni.
Pot fi modelate atât pereți întregi și grinzi, cât și detalii (porțiuni) ale grinzilor (zona de discontinuitate izolată, denumită și capăt trunchiat). În cazul pereților și al grinzilor întregi, rezemările trebuie definite astfel încât să rezulte o structură (extern) izostatică (static determinată) sau hiperstatică (static nedeterminată). Transferul de forțe la capetele trunchiate ale grinzilor este introdus printr-o zonă specială de transfer Saint-Venant, care asigură o distribuție realistă a tensiunilor în zona de detaliu analizată.
Pentru a modela majoritatea situațiilor din procesul de construcție, în CSFM sunt disponibile mai multe tipuri de reazeme (Fig. 7) și componente utilizate pentru transferul încărcărilor (Fig. 8).
Reazeme
Rezemarea punctuală poate fi modelată în mai multe moduri pentru a se asigura că tensiunile nu sunt localizate într-un singur punct, ci distribuite pe o suprafață mai mare. Prima opțiune este rezemarea punctuală distribuită (Fig. 7a), care distribuie uniform încărcarea pe marginea elementului pe lățimea specificată.

Rezemarea de suprafață (Fig. 7d), pe de altă parte, poate fi plasată doar în interiorul unui volum de beton cu o rază efectivă definită. Aceasta este conectată prin elemente rigide la nodurile plasei de armătură din interiorul acestei raze. Prin urmare, este necesară definirea unui coș de armătură în jurul rezemării de suprafață.
Pentru modelarea mai precisă a unor scenarii reale, există alte două opțiuni pentru rezemarea punctuală. În primul rând, există rezemarea punctuală cu o placă de reazem de lățime și grosime definite (Fig. 7b). Materialul plăcii de reazem poate fi specificat, iar întreaga placă de reazem este discretizată independent. În al doilea rând, este disponibilă rezemarea suspendată (Fig. 7e), care poate fi utilizată pentru modelarea ancorelor de ridicare sau a dornurilor de ridicare.
Rezemarea liniară (Fig. 7c) poate fi definită pe o margine (prin specificarea lungimii sale) sau în interiorul unui element (printr-o polilinie). Este posibilă, de asemenea, specificarea rigidității și/sau a comportamentului neliniar (reazem la compresiune/întindere sau numai la compresiune).
- Citiți descrierile detaliate în Tipuri de reazeme în IDEA StatiCa Detail
Componente de transmitere a încărcărilor
Introducerea încărcărilor în structură poate fi, de asemenea, modelată în mai multe moduri. Pentru încărcările concentrate, o placă de reazem (Fig. 8a) poate fi utilizată similar cu rezemarea punctuală, distribuind încărcarea concentrată pe o suprafață mai mare prin intermediul unei plăci de oțel cu lățime și grosime definite.
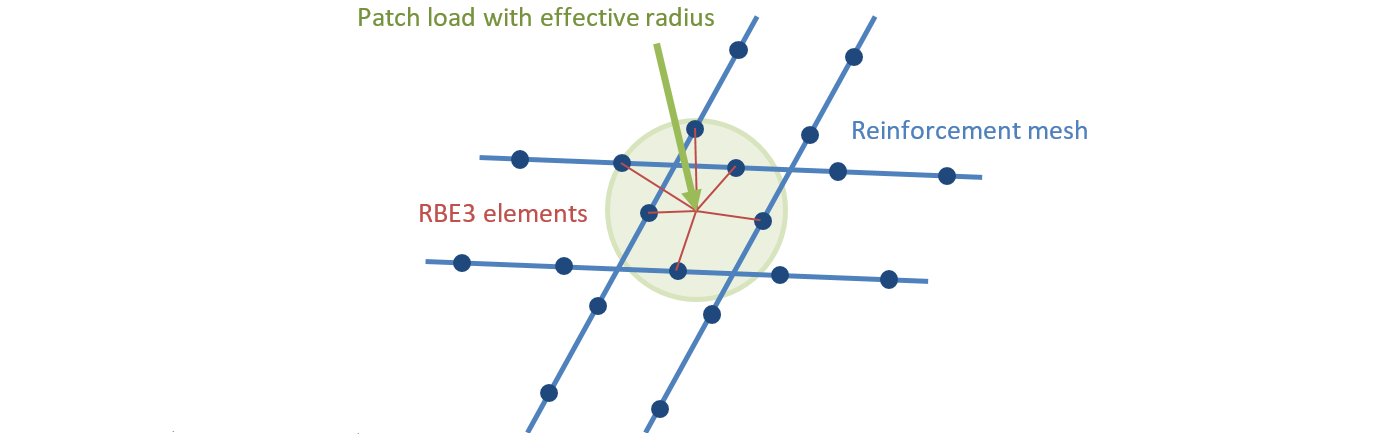
Încărcarea concentrată poate fi aplicată fie direct pe suprafața structurii cu o rază de acțiune definită (încărcarea este aplicată elementelor de beton), fie printr-un dispozitiv special de transmitere denumit încărcare de suprafață (Fig. 8b și Fig. 9). Încărcarea de suprafață permite transmiterea încărcării direct la armătura definită situată în interiorul ariei razei efective. Pentru a asigura funcționalitatea corectă a încărcării de suprafață, este necesară definirea unui grup de bare care vor fi interconectate cu încărcarea (în proprietățile armăturii). Când armătura interconectată nu este definită, mecanismul de transfer al încărcării este același ca pentru încărcarea concentrată plasată pe suprafața unui element, iar încărcarea este transferată prin constrângeri la elementele de beton, nu direct la armătură.
Ancorele de ridicare sau dornurile de ridicare pot fi modelate printr-o încărcare suspendată (Fig. 8c). Utilizatorul poate folosi o zonă parțial încărcată (Fig. 8d), care permite creșterea capacității portante a betonului la compresiune conform Eurocodului (nu este posibilă utilizarea acestui tip de componentă de transmitere a încărcării când este setat ACI). Structura poate fi, de asemenea, încărcată cu încărcări liniare pe margini, printr-o polilinie generală sau prin încărcări de suprafață. Aplicația Detail poate lua în considerare automat greutatea proprie în analiză.
În multe cazuri, este necesar să modelăm doar un detaliu (o parte) dintr-un element structural, cum ar fi rezemarea unei grinzi, o deschidere în mijlocul grinzii etc. Această abordare poate conduce la configurații de rezemare instabile, dar admisibile în IDEA StatiCa Detail (inclusiv cazul fără reazeme). Cu toate acestea, în astfel de cazuri, este necesară și modelarea secțiunii care reprezintă legătura cu zona B adiacentă, inclusiv forțele interioare din această secțiune care satisfac echilibrul. În anumite cazuri (de exemplu, la modelarea rezemării unei grinzi), aceste forțe interioare pot fi determinate automat de program.
Între zona B și zona de discontinuitate analizată, se creează automat o zonă de transfer Saint-Venant pentru a asigura o distribuție realistă a tensiunilor în zona analizată. Lățimea zonei de transfer este determinată ca jumătate din înălțimea secțiunii. Deoarece singurul scop al zonei Saint-Venant este de a obține o distribuție corespunzătoare a tensiunilor în restul modelului, niciun rezultat din această zonă nu este afișat în verificare și niciun criteriu de oprire nu este considerat aici.
Marginea zonei Saint-Venant care reprezintă capătul decupat al grinzii este modelată ca rigidă, adică poate roti, dar trebuie să rămână plană. Aceasta se realizează prin conectarea tuturor nodurilor MEF ale marginii la un nod separat aflat la centrul de inerție al secțiunii, utilizând un element de corp rigid (RBE2). Forțele interioare ale elementului pot fi apoi aplicate în acest nod, după cum se arată în Fig. 10.

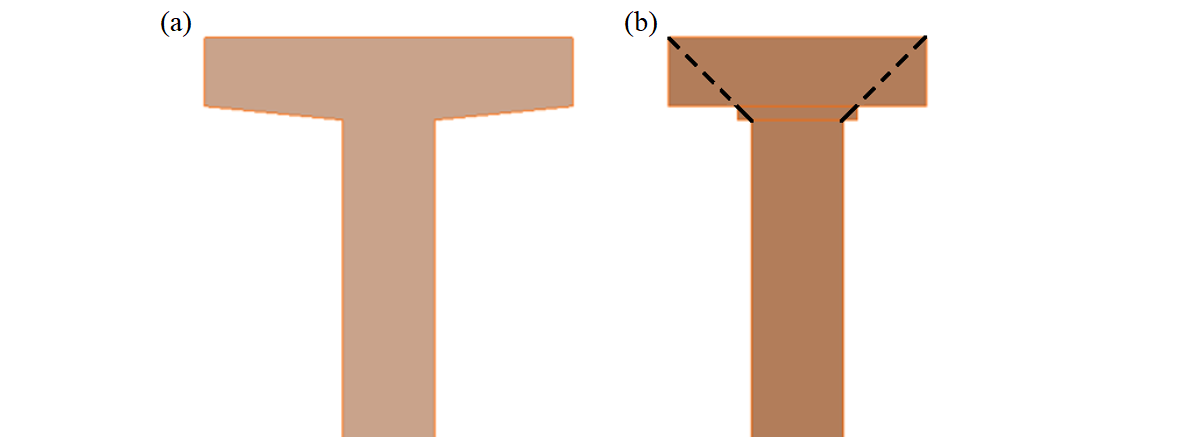
Reducerea secțiunii transversale se efectuează automat pentru structurile definite ca un element de tip grindă sau nod de cadru (definit prin axa x și o secțiune transversală). Această modificare se aplică automat secțiunilor transversale cu tălpi foarte late (Fig. 11) și se bazează pe ipoteza că un câmp de tensiuni de compresiune se extinde din perete la un unghi de 45°, astfel încât lățimea redusă menționată anterior reprezintă lățimea maximă capabilă să transfere încărcările.
De remarcat că metoda de determinare a lățimii efective a tălpii implementată în CSFM diferă de cea prevăzută în 5.3.2.1 EN 1992-1-1 (2015) sau în 9.2.4.4 ACI 318-19. Pe lângă geometrie, lățimea efactivă a tălpii conform Eurocodului este influențată explicit de lungimile deschiderilor și de condițiile la limită ale structurii.
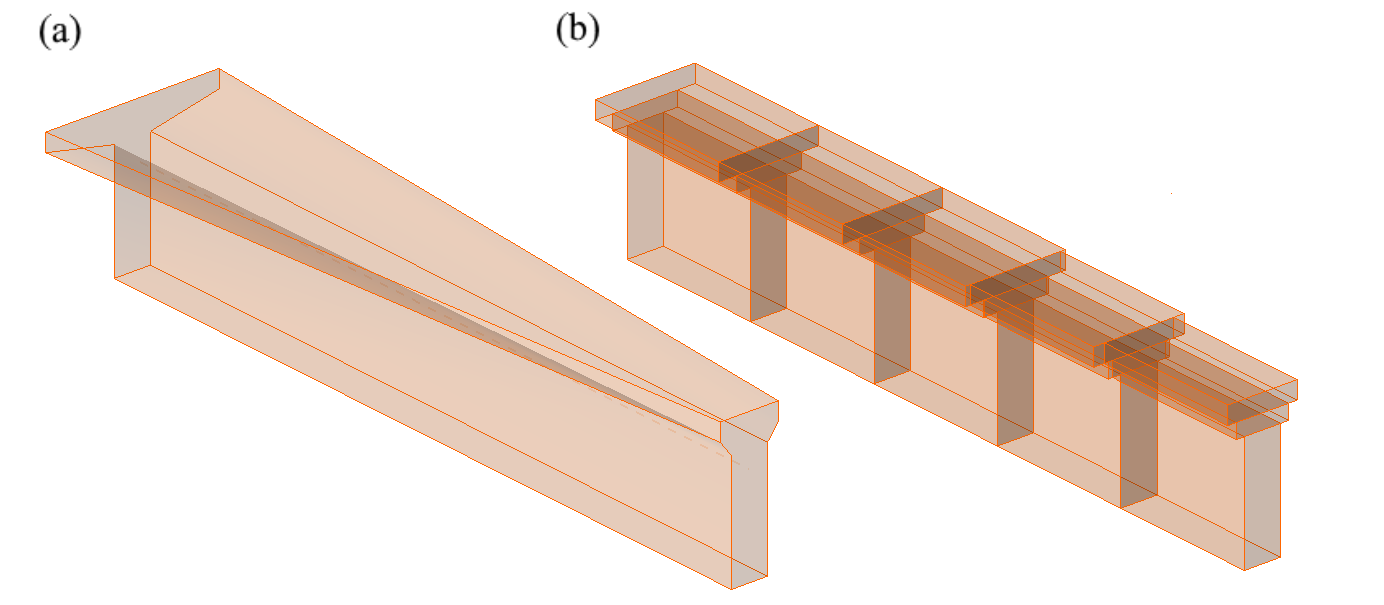
În cazul vutelor situate în plan orizontal (Fig. 12), fiecare vută este împărțită în cinci secțiuni pe lungimea sa. Fiecare dintre aceste secțiuni este apoi modelată ca un perete cu grosime constantă, egală cu grosimea reală la mijlocul secțiunii respective.
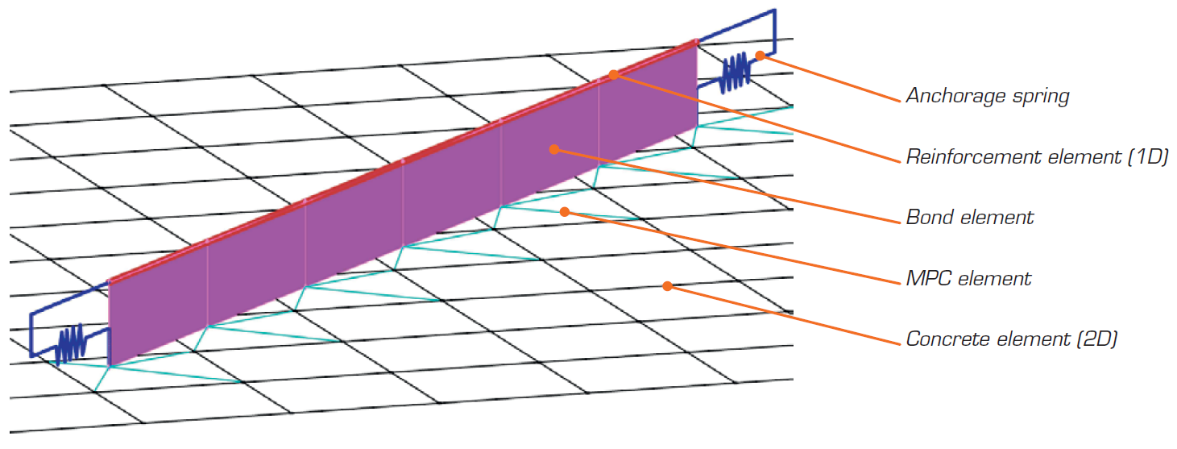
Modelul de analiză cu elemente finite neliniar (inelastic) este creat din mai multe tipuri de elemente finite utilizate pentru modelarea betonului, a armăturii și a aderenței dintre acestea. Elementele de beton și de armătură sunt mai întâi discretizate independent, apoi conectate între ele prin constrângeri multi-punct (elemente MPC). Aceasta permite armăturii să ocupe o poziție arbitrară, relativă față de beton. Dacă se dorește verificarea lungimii de ancoraj, între armătură și elementele MPC se inserează elemente de aderență și arcuri de capăt de ancoraj.
Beton
Betonul este modelat cu elemente de tip placă (shell) patrulaterale și trilaterale, CQUAD4 și CTRIA3. Acestea pot fi definite prin patru, respectiv trei noduri. Se presupune că în aceste elemente există doar stare plană de tensiuni, adică tensiunile sau deformațiile în direcția z nu sunt luate în considerare.
Fiecare element are patru sau trei puncte de integrare, plasate la aproximativ 1/4 din dimensiunea sa. În fiecare punct de integrare al fiecărui element se calculează direcțiile deformațiilor principale α1, α2. În ambele direcții, tensiunile principale σc1, σc2 și rigiditatea E1, E2 sunt evaluate conform diagramei efort-deformație specificată pentru beton, conform Fig. 2. Trebuie menționat că efectul rezistenței reduse a betonului comprimat cuplează comportamentul direcției principale de compresiune cu starea actuală a celeilalte direcții principale.
Armătură
Barele de armătură sunt modelate prin elemente 1D de tip „bară" cu două noduri (CROD), care au doar rigiditate axială. Aceste elemente sunt conectate la elemente speciale de „aderență", dezvoltate pentru a modela comportamentul de alunecare dintre o bară de armătură și betonul înconjurător. Aceste elemente de aderență sunt ulterior conectate prin elemente MPC (constrângeri multi-punct) la plasa care reprezintă betonul. Această abordare permite discretizarea independentă a armăturii și a betonului, interconectarea lor fiind asigurată ulterior.
Elemente de aderență
Lungimea de ancoraj este verificată prin implementarea tensiunilor de forfecare de aderență dintre elementele de beton (2D) și elementele de bară de armătură (1D) în modelul cu elemente finite. În acest scop, a fost dezvoltat un tip de element finit de „aderență".
Definiția elementului de aderență este similară cu cea a unui element de tip placă (CQUAD4). Este definit tot prin 4 noduri, dar spre deosebire de un element de tip placă, are o rigiditate nenulă doar la forfecare între cele două noduri superioare și cele două noduri inferioare. În model, nodurile superioare sunt conectate la elementele care reprezintă armătura, iar nodurile inferioare la cele care reprezintă betonul. Comportamentul acestui element este descris de tensiunea de aderență, τb, ca funcție biliniară a alunecării dintre nodurile superioare și inferioare, δu, a se vedea Fig. 14.

Modulul de rigiditate elastică al relației aderență-alunecare, Gb, este definit astfel:
unde:
kg coeficient dependent de suprafața barei de armătură (implicit kg = 0,2)
Ec modulul de elasticitate al betonului (luat ca Ecm în cazul EN)
Ø diametrul barei de armătură
Valorile de calcul (valori factorizate) ale tensiunii ultime de forfecare prin aderență, fbd, prevăzute în codurile de proiectare selectate EN 1992-1-1 sau ACI 318-19, sunt utilizate pentru verificarea lungimii de ancoraj. Întărirea ramurii plastice se calculează implicit ca Gb/105.
Arc de ancoraj
Prevederea capetelor de ancoraj la barele de armătură (adică îndoiri, cârlige, bucle…), care respectă prescripțiile codurilor de proiectare, permite reducerea lungimii de ancoraj de bază a barelor (lb,net) cu un anumit factor β (denumit în continuare „coeficient de ancoraj"). Valoarea de calcul a lungimii de ancoraj (lb) se calculează astfel:
Reducerea intenționată a lb,net este echivalentă cu activarea barei de armătură la capătul său la un procent din capacitatea sa maximă dat de coeficientul de reducere a ancorajului, conform Fig. 15a.

Reducerea lungimii de ancoraj este inclusă în modelul cu elemente finite prin intermediul unui element arc la capătul barei (Fig. 15), definit prin modelul constitutiv prezentat în Fig. 15b. Forța maximă transmisă de acest arc (Fau) este:
unde :
β coeficientul de ancoraj în funcție de tipul de ancoraj,
As secțiunea transversală a barei de armătură,
fyd valoarea de calcul (valoarea factorizată) a limitei de curgere a armăturii.
Elementele finite sunt implementate intern, iar modelul de analiză este generat automat, fără a fi necesară o interacțiune specializată din partea utilizatorului. O parte importantă a acestui proces este generarea plasei.
Beton
Toate elementele de beton sunt discretizate împreună. O dimensiune recomandată a elementului este calculată automat de aplicație pe baza dimensiunii și formei structurii, luând în considerare diametrul celei mai mari bare de armătură. Mai mult, dimensiunea recomandată a elementului garantează că un minim de 4 elemente sunt generate în părțile subțiri ale structurii, cum ar fi stâlpii zvelți sau plăcile subțiri, pentru a asigura rezultate fiabile în aceste zone. Numărul maxim de elemente de beton este limitat la 5000, dar această valoare este suficientă pentru a furniza dimensiunea recomandată a elementului pentru majoritatea structurilor. Proiectanții pot selecta întotdeauna o dimensiune definită de utilizator pentru elementul de beton, modificând multiplicatorul dimensiunii implicite a plasei.
Armătură
Armătura este împărțită în elemente cu aproximativ aceeași lungime ca dimensiunea elementului de beton. Odată ce plasele de armătură și beton sunt generate, acestea sunt interconectate cu elemente de aderență, așa cum se arată în Fig. 13.
Plăci de reazem
Elementele structurale auxiliare, cum ar fi plăcile de reazem, sunt discretizate independent. Dimensiunea acestor elemente este calculată ca 2/3 din dimensiunea elementelor de beton în zona de îmbinare. Nodurile plasei plăcii de reazem sunt apoi conectate la nodurile de margine ale plasei de beton folosind elemente de constrângere prin interpolare (RBE3).
Încărcări și reazeme
Încărcările de suprafață și rezemările de suprafață sunt conectate doar la armătură, așa cum se arată în Fig. 16. Prin urmare, este necesar să se definească armătura în jurul acestora. Conexiunea la toate nodurile armăturii în interiorul razei efective este asigurată de elemente RBE3 cu pondere egală.
Rezemările liniare și încărcările liniare sunt conectate la nodurile plasei de beton folosind elemente RBE3, pe baza lățimii specificate sau a razei efective. Ponderea conexiunilor este invers proporțională cu distanța față de reazem sau impulsul de încărcare.
- Citiți mai multe despre interconexiunea dintre încărcările individuale și plasă în Descrierea generală a impulsurilor de încărcare în aplicația Detail
Un algoritm standard Newton-Raphson (NR) complet este utilizat pentru a găsi soluția unei probleme FEM neliniare.
În general, algoritmul NR nu converge frecvent atunci când încărcarea completă este aplicată într-un singur pas. O abordare obișnuită, utilizată și aici, este de a aplica încărcarea secvențial în mai multe incremente și de a utiliza rezultatul din incrementul de încărcare anterior pentru a iniția soluția Newton a celui următor. În acest scop, un algoritm de control al încărcării a fost implementat peste Newton-Raphson. În cazul în care iterațiile NR nu converg, incrementul de încărcare curent este redus la jumătate din valoarea sa, iar iterațiile NR sunt reluate.
Un al doilea scop al algoritmului de control al încărcării este de a găsi încărcarea critică, care corespunde anumitor „criterii de oprire" – în mod specific deformația maximă în beton, alunecarea maximă în elementele de aderență, deplasarea maximă în elementele de ancoraj și deformația maximă în barele de armătură. Încărcarea critică este găsită folosind metoda bisecției. În cazul în care criteriul de oprire este depășit oriunde în model, rezultatele ultimului increment de încărcare sunt eliminate, iar un nou increment de jumătate din mărimea celui anterior este calculat. Acest proces se repetă până când încărcarea critică este găsită cu o anumită toleranță de eroare.
Pentru beton, criteriul de oprire a fost setat la o deformație de 5% la compresiune (adică, aproximativ un ordin de mărime mai mare decât deformația reală de cedare a betonului) și 7% la întindere la punctele de integrare ale elementelor de tip placă. La întindere, valoarea a fost setată pentru a permite atingerea mai întâi a deformației limită în armătură, care este de obicei în jur de 5% fără a lua în considerare participarea betonului întins. La compresiune, valoarea a fost aleasă dintre mai multe alternative ca una suficient de mare pentru ca efectele strivirii să fie vizibile în rezultate, dar suficient de mică pentru a nu cauza prea multe probleme de stabilitate numerică.

Pentru armătură, criteriul de oprire este definit în termeni de tensiuni. Deoarece tensiunile la fisură sunt modelate, criteriul la întindere corespunde rezistenței la întindere a armăturii ținând cont de coeficientul de siguranță. Aceeași valoare este utilizată pentru criteriul la compresiune.
Criteriul de oprire în elementele de aderență și resorturile de ancoraj este α·δumax, unde δumax este alunecarea maximă utilizată în verificările conform codului și α = 10.
Rezultatele sunt prezentate independent pentru beton și pentru elementele de armătură. Valorile tensiunilor și deformațiilor în beton sunt calculate la punctele de integrare ale elementelor de tip placă. Cu toate acestea, deoarece nu este practic să se prezinte datele în acest mod, rezultatele sunt prezentate implicit în noduri, cum ar fi valoarea maximă a tensiunii de compresiune din punctele de integrare Gauss adiacente în elementele conectate (Fig. 18). Trebuie remarcat că această reprezentare poate subestima local rezultatele la marginile comprimate ale elementelor, în cazul în care dimensiunea elementului finit este similară cu adâncimea zonei comprimate.

Fig. 18 - Element finit de beton cu puncte de integrare și noduri: prezentarea rezultatelor pentru beton în noduri și în elementele finite.
Rezultatele pentru elementele finite de armătură sunt fie constante pentru fiecare element (o valoare – de ex., pentru tensiunile din oțel), fie liniare (două valori – pentru rezultatele de aderență). Pentru elementele auxiliare, cum ar fi elementele plăcilor de reazem, sunt prezentate doar deformațiile.
3 Verificarea modelului
Evaluarea structurii folosind CSFM se realizează prin două analize diferite: una pentru starea limită de serviciu și una pentru combinațiile de încărcări la starea limită ultimă. Analiza la starea limită de serviciu presupune că comportamentul ultim al elementului este satisfăcător și că condițiile de curgere ale materialului nu vor fi atinse la nivelurile de încărcare de serviciu. Această abordare permite utilizarea unor modele constitutive simplificate (cu o ramură liniară a diagramei efort-deformație a betonului) pentru analiza la starea limită de serviciu, în scopul îmbunătățirii stabilității numerice și a vitezei de calcul. Prin urmare, se recomandă utilizarea fluxului de lucru prezentat mai jos, în care analiza la starea limită ultimă este efectuată ca prim pas.
Analiza la starea limită ultimă
Diferitele verificări impuse de codurile de proiectare specifice sunt evaluate pe baza rezultatelor directe furnizate de model. Verificările la SLU sunt efectuate pentru rezistența betonului, rezistența armăturii și ancoraj (tensiuni de forfecare prin aderență).
Pentru a asigura un proiect eficient al unui element structural, se recomandă cu tărie efectuarea unei analize preliminare care să țină cont de următorii pași:
- Alegeți o selecție a celor mai critice combinații de încărcări.
- Calculați doar combinațiile de încărcări la Starea Limită Ultimă (SLU).
- Utilizați o plasă grosieră (prin mărirea multiplicatorului dimensiunii implicite a plasei în Setup (Fig. 19)).

Un astfel de model va calcula foarte rapid, permițând proiectanților să revizuiască detaliile elementului structural în mod eficient și să repete analiza până când toate cerințele de verificare sunt îndeplinite pentru cele mai critice combinații de încărcări. Odată ce toate cerințele de verificare ale acestei analize preliminare sunt îndeplinite, se sugerează includerea combinațiilor complete de încărcări ultime și utilizarea unei plase fine (dimensiunea plasei recomandate de program). Utilizatorul poate modifica dimensiunea plasei prin multiplicator, care poate lua valori de la 0,5 la 5 (Fig. 19).
Rezultatele de bază și verificările (tensiune, deformație și grad de utilizare (adică valoarea calculată/valoarea limită din cod), precum și direcția tensiunilor principale în cazul elementelor din beton) sunt afișate prin intermediul diferitelor diagrame, unde compresiunea este prezentată în general în roșu și întinderea în albastru. Valorile globale minime și maxime pentru întreaga structură pot fi evidențiate, precum și valorile minime și maxime pentru fiecare parte definită de utilizator. Într-o filă separată a programului, pot fi afișate rezultate avansate, cum ar fi valorile tensoriale, deformațiile structurii și procentele de armare (efective și geometrice) utilizate pentru calculul participării betonului întins al barelor de armătură. De asemenea, pot fi prezentate încărcările și reacțiunile pentru combinațiile sau cazurile de încărcare selectate.
Analiza la starea limită de serviciu
Verificările la SLS sunt efectuate pentru limitarea tensiunilor, deschiderea fisurilor și limitele de deformație. Tensiunile sunt verificate în elementele de beton și armătură conform codului aplicabil, într-un mod similar celui specificat pentru SLU.
Analiza la starea limită de serviciu conține anumite simplificări ale modelelor constitutive utilizate pentru analiza la starea limită ultimă. Se presupune o aderență perfectă, adică lungimea de ancoraj nu este verificată la starea limită de serviciu. Mai mult, ramura plastică a curbei efort-deformație a betonului la compresiune este neglijată, în timp ce ramura elastică este liniară și infinită. Aceste simplificări îmbunătățesc stabilitatea numerică și viteza de calcul și nu reduc generalitatea soluției, atât timp cât limitele de tensiune ale materialelor rezultante la starea limită de serviciu sunt clar sub punctele lor de curgere (conform cerințelor standardelor). Prin urmare, modelele simplificate utilizate pentru starea limită de serviciu sunt valabile numai dacă toate cerințele de verificare sunt îndeplinite.
Calculul lățimii fisurilor
Există două moduri de calcul al lățimii fisurilor - fisurare stabilizată și nonstabilizată. În funcție de procentul geometric de armare din fiecare parte a structurii se decide ce tip de model de calcul al fisurilor va fi utilizat (TCM pentru fisurare stabilizată și POM pentru modelul de fisurare nonstabilizată).

În timp ce CSFM furnizează un rezultat direct pentru majoritatea verificărilor (de ex., capacitatea elementului, săgețile…), rezultatele privind lățimea fisurilor sunt calculate din rezultatele deformațiilor armăturii furnizate direct de analiza cu Metoda Elementelor Finite, urmând metodologia descrisă în Fig. 20. Se consideră o cinematică a fisurii fără alunecare (deschidere pură a fisurii) (Fig. 20a), ceea ce este consistent cu ipotezele principale ale modelului. Direcțiile principale ale tensiunilor și deformațiilor definesc înclinarea fisurilor (θr = θs= θe). Conform (Fig. 20b), lățimea fisurii (w) poate fi proiectată în direcția barei de armătură (wb), rezultând:
unde θb este înclinarea barei.
Rețineți că programul afișează valorile θr și θb < π/2. Aceasta înseamnă că ecuația anterioară este valabilă pentru cazurile în care armătura și fisura traversează cadrane diferite ale sistemului de coordonate cartezian, așa cum se arată în Fig. 20, unde armătura traversează cadranele I și III, iar fisura traversează cadranele II și IV. Pentru cazurile în care armătura și fisura traversează aceleași cadrane, ecuația trebuie modificată astfel:
Componenta wb este calculată în mod consistent pe baza modelelor de participare a betonului întins, prin integrarea deformațiilor armăturii. Pentru zonele cu scheme de fisurare complet dezvoltate, deformațiile medii calculate (em) de-a lungul barelor de armătură sunt integrate direct pe distanța dintre fisuri (sr), conform indicațiilor din (Fig. 20c). Deși această abordare pentru calculul direcțiilor fisurilor nu corespunde poziției reale a fisurilor, ea furnizează totuși valori reprezentative care conduc la rezultate ale lățimii fisurilor comparabile cu valorile lățimii fisurilor impuse de cod la poziția barei de armătură.
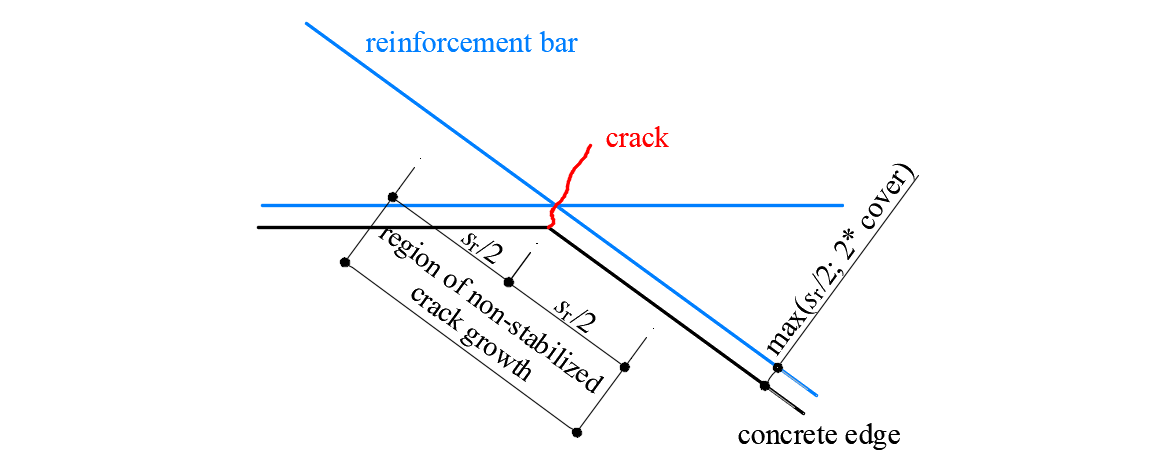
Situații speciale sunt observate la colțurile concave ale structurii calculate. În acest caz, colțul predefinește poziția unei singure fisuri care se comportă în mod nonstabilizat înainte ca fisuri adiacente suplimentare să se dezvolte. Aceste fisuri suplimentare se dezvoltă în general după domeniul de exploatare (Mata-Falcón 2015), ceea ce justifică calculul lățimii fisurilor într-o astfel de zonă ca și cum ar fi nonstabilizate (Fig. 21).
Participarea betonului întins
Implementarea participării betonului întins face distincție între cazurile de scheme de fisurare stabilizată și nonstabilizată. În ambele cazuri, betonul este considerat complet fisurat înainte de încărcare, în mod implicit.

Fisurare stabilizată
În schemele de fisurare complet dezvoltate, participarea betonului întins este introdusă utilizând Modelul Corzii în Întindere (TCM) (Marti et al. 1998; Alvarez 1998) – Fig. 22a – care s-a dovedit că furnizează predicții excelente ale răspunsului în ciuda simplității sale (Burns 2012). TCM presupune o relație tensiune de forfecare prin aderență-alunecare în trepte, rigid-perfect plastică, cu τb = τb0 =2 fctm pentru σs ≤ fy și τb =τb1 = fctm pentru σs > fy. Tratând fiecare bară de armătură ca o coardă în întindere – Fig. 22b și Fig. 22a – distribuția forțelor de forfecare prin aderență, a tensiunilor din oțel și beton și, prin urmare, distribuția deformațiilor între două fisuri poate fi determinată pentru orice valoare dată a tensiunilor maxime din oțel (sau deformațiilor) la fisuri.
Pentru sr = sr0, o nouă fisură poate sau nu să se formeze deoarece la mijlocul distanței dintre două fisuri σc1 = fct. În consecință, distanța dintre fisuri poate varia cu un factor de doi, adică sr = λsr0, cu l = 0,5…1,0. Presupunând o anumită valoare pentru λ, deformația medie a corzii (εm) poate fi exprimată ca funcție de tensiunile maxime din armătură (adică tensiunile la fisuri, σsr). Pentru diagrama bilineară idealizată tensiune-deformație a barelor de armătură goale, considerată implicit în CSFM, se obțin următoarele expresii analitice în formă închisă (Marti et al. 1998):
unde:
Esh modulul de întărire al oțelului Esh = (ft – fy)/(εu – fy /Es) ,
Es modulul de elasticitate al armăturii,
Ø diametrul barei de armătură,
sr distanța dintre fisuri,
σsr tensiunile din armătură la fisuri,
σs tensiunile efective din armătură,
fy limita de curgere a armăturii.
Implementarea CSFM în IDEA StatiCa Detail consideră distanța medie dintre fisuri în mod implicit atunci când efectuează analiza câmpului de tensiuni asistată de calculator. Distanța medie dintre fisuri este considerată a fi 2/3 din distanța maximă dintre fisuri (λ = 0,67), ceea ce urmează recomandările formulate pe baza testelor la încovoiere și întindere (Broms 1965; Beeby 1979; Meier 1983). Trebuie remarcat că calculele lățimii fisurilor consideră o distanță maximă între fisuri (λ = 1,0) pentru a obține valori conservative.
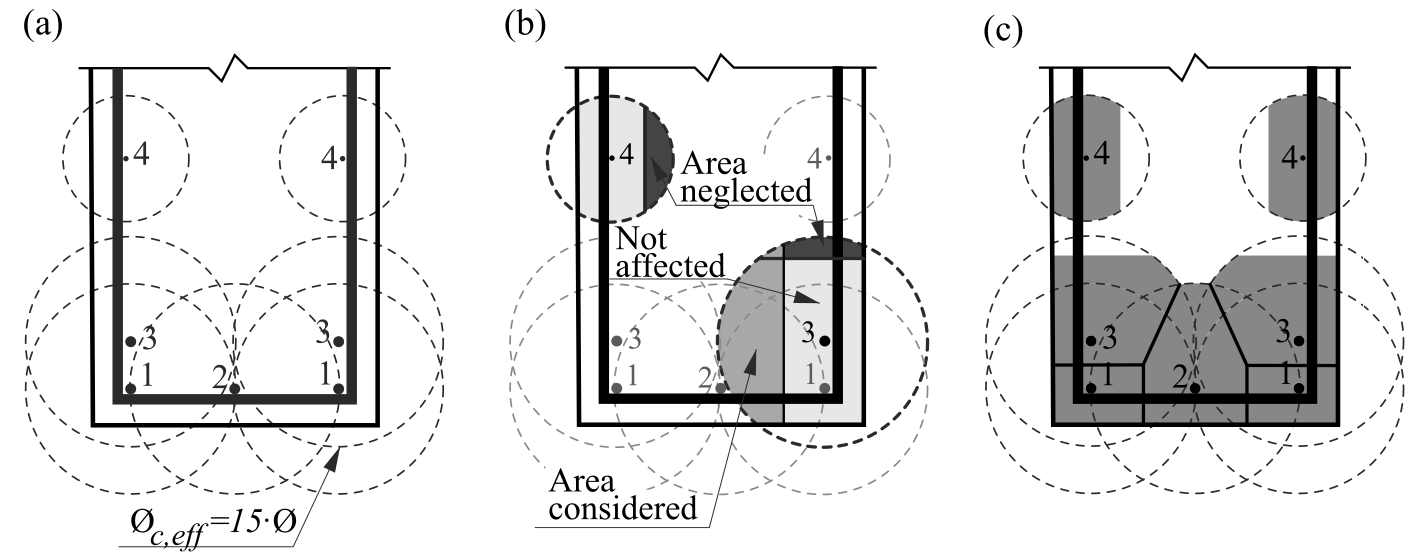
Aplicarea TCM depinde de procentul de armare și, prin urmare, atribuirea unei arii corespunzătoare de beton care lucrează la întindere între fisuri fiecărei bare de armătură este esențială. O procedură numerică automată a fost dezvoltată pentru a defini procentul efectiv de armare corespunzător (ρeff = As/Ac,eff) pentru orice configurație, inclusiv armătură oblică (Fig. 23).
Fisurare nonstabilizată
Fisurile existente în zonele cu procente geometrice de armare mai mici decât ρcr, adică cantitatea minimă de armătură pentru care armătura este capabilă să preia încărcarea de fisurare fără a ceda, sunt generate fie de acțiuni nemecanice (de ex. contracție) fie de propagarea fisurilor controlate de alte armături. Valoarea acestei armături minime se obține astfel:
unde:
fy limita de curgere a armăturii,
fct rezistența la întindere a betonului,
n raportul modular, n = Es / Ec .
Pentru beton și oțel de armătură convenționale, ρcr este de aproximativ 0,6%.
Pentru etrieri cu procente de armare sub ρcr, fisurarea este considerată nonstabilizată și participarea betonului întins este implementată prin intermediul Modelului de Smulgere (POM) descris în Fig. 22b. Acest model analizează comportamentul unei singure fisuri fără a considera interacțiunea mecanică dintre fisuri separate, neglijând deformabilitatea betonului la întindere și presupunând aceeași relație tensiune de forfecare prin aderență-alunecare în trepte, rigid-perfect plastică, utilizată de TCM. Aceasta permite obținerea distribuției deformațiilor din armătură (εs) în vecinătatea fisurii pentru orice tensiune maximă din oțel la fisură (σsr) direct din echilibru. Dat fiind faptul că distanța dintre fisuri este necunoscută pentru o schemă de fisurare incomplet dezvoltată, deformația medie (εm) este calculată pentru orice nivel de încărcare pe distanța dintre punctele cu alunecare zero atunci când bara de armătură atinge rezistența la întindere (ft) la fisură (lε,avg în Fig. 22b), conducând la următoarele relații:

Modelele propuse permit calculul comportamentului armăturii aderente, care este în final considerat în analiză. Acest comportament (inclusiv participarea betonului întins) pentru cel mai comun oțel de armătură european (B500B, cu ft / fy = 1,08 și εu = 5%) este ilustrat în Fig. 22c-d.
4 Verificări structurale conform Eurocode
Evaluarea structurii utilizând CSFM se realizează prin două analize diferite: una pentru starea limită de serviciu și una pentru combinațiile de încărcări la starea limită ultimă. Analiza la starea limită de serviciu presupune că comportamentul ultim al elementului este satisfăcător și că condițiile de curgere ale materialului nu vor fi atinse la nivelurile de încărcare de serviciu. Această abordare permite utilizarea unor modele constitutive simplificate (cu o ramură liniară a diagramei efort-deformație a betonului) pentru analiza la starea limită de serviciu, în scopul îmbunătățirii stabilității numerice și a vitezei de calcul.
Beton - SLU
Modelul de beton implementat în CSFM se bazează pe legile constitutive uniaxiale la compresiune prescrise de EN 1992-1-1 pentru calculul secțiunilor transversale, care depind doar de rezistența la compresiune. Diagrama parabolă-dreptunghi specificată în EN 1992-1-1 Cl. 3.1.7 (1) (Fig. 24a) este utilizată implicit în CSFM, dar proiectanții pot alege și o relație elastic-perfect plastică mai simplificată conform EN 1992-1-1 Cl. 3.1.7 (2) (Fig. 24b). Rezistența la întindere este neglijată, ca și în calculul clasic al betonului armat.

Implementarea CSFM în IDEA StatiCa Detail nu consideră un criteriu explicit de cedare în termeni de deformații pentru betonul comprimat (adică, după atingerea tensiunii de vârf, se consideră o ramură plastică cu εcu2 (εcu3) cu valoarea de 5%, în timp ce EN 1992-1-1 presupune o deformație ultimă mai mică de 0,35%). Această simplificare nu permite verificarea capacității de deformare a structurilor care cedează prin compresiune. Cu toate acestea, capacitatea ultimă fcd conform EN 1992-1-1 3.1.3 este corect estimată atunci când, pe lângă factorul betonului fisurat (kc2 definit în (Fig. 25)), creșterea fragilității betonului odată cu creșterea rezistenței este luată în considerare prin intermediul factorului de reducere definit în fib Model Code 2010 după cum urmează:
unde:
αcc este coeficientul care ține cont de efectele pe termen lung asupra rezistenței la compresiune și de efectele nefavorabile rezultate din modul de aplicare a încărcării. Este conform EN 1992-1-1 Cl. 3.1.6 (1). Valoarea implicită este 1,0.
kc este factorul global de reducere a rezistenței la compresiune
kc2 este factorul de reducere datorat prezenței fisurării transversale
fck este rezistența caracteristică pe cilindru a betonului (în MPa pentru definiția ).

Beton - SLS
Analiza la starea limită de serviciu conține anumite simplificări ale modelelor constitutive utilizate pentru analiza la starea limită ultimă. Ramura plastică a curbei efort-deformație a betonului comprimat este neglijată, în timp ce ramura elastică este liniară și infinită. Legea rezistenței reduse a betonului comprimat nu este luată în considerare. Aceste simplificări îmbunătățesc stabilitatea numerică și viteza de calcul și nu reduc generalitatea soluției atât timp cât limitele de tensiune ale materialelor la starea limită de serviciu sunt clar sub punctele de curgere (conform cerințelor Eurocod). Prin urmare, modelele simplificate utilizate pentru starea limită de serviciu sunt valabile numai dacă toate cerințele de verificare sunt îndeplinite.
Efecte pe termen lung
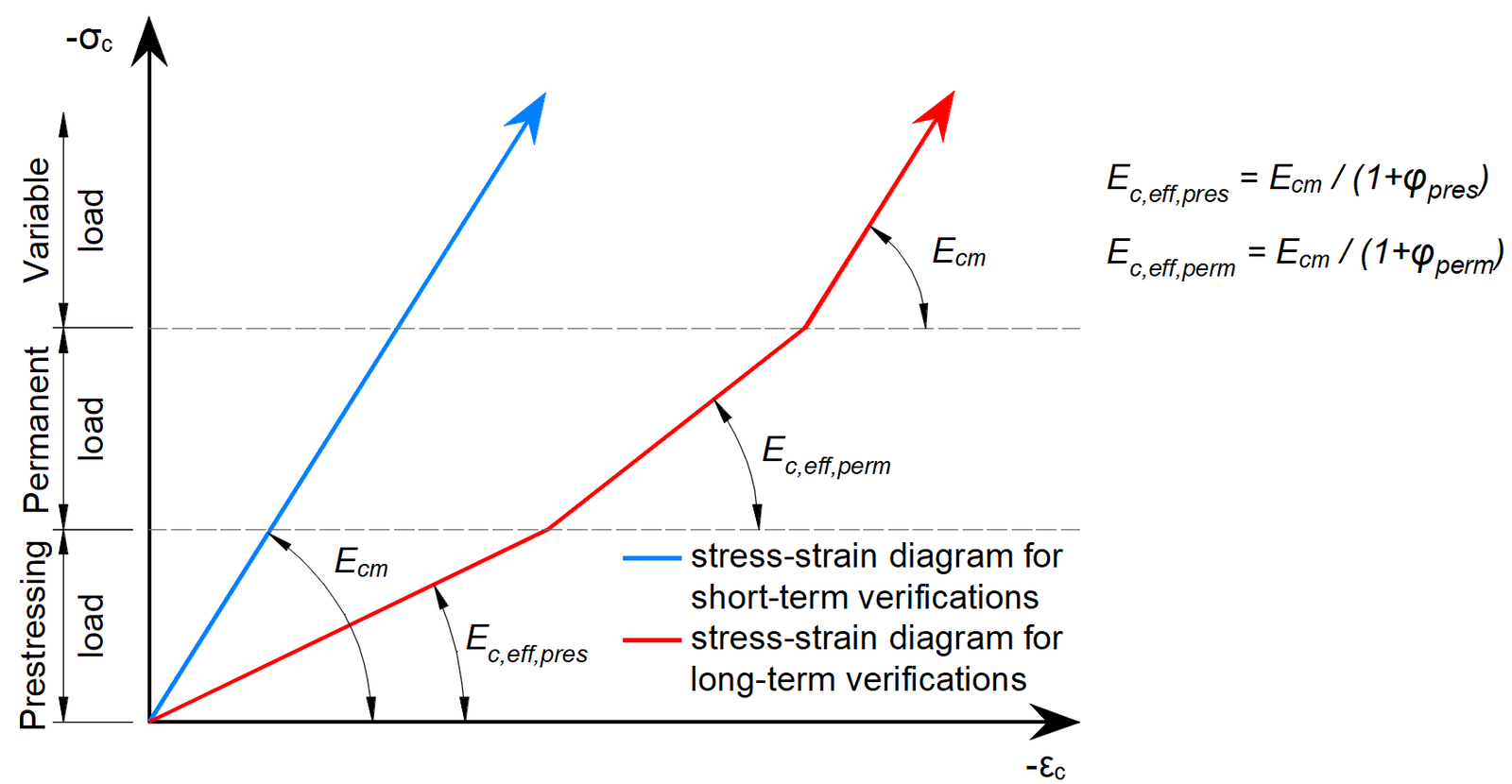
În analiza la starea limită de serviciu, efectele pe termen lung ale betonului sunt considerate utilizând un coeficient de fluaj efectiv infinit (, luat cu valoarea implicită de 2,5) care modifică modulul de elasticitate secant al betonului (Ecm) conform EN 1992-1-1, secțiunea 3.1.4 (3) resp. 7.4.3 (5) după cum urmează:
Când se iau în considerare efectele pe termen lung, un pas de încărcare cu toate încărcările permanente este calculat mai întâi luând în considerare coeficientul de fluaj (adică, utilizând modulul de elasticitate efectiv al betonului, Ec,eff), iar apoi încărcările suplimentare sunt calculate fără coeficientul de fluaj (adică, utilizând Ecm). În plus, pentru efectuarea verificărilor pe termen scurt, se realizează un alt calcul în care toate încărcările sunt calculate fără coeficientul de fluaj. Ambele calcule pentru verificările pe termen lung și scurt sunt reprezentate în Fig. 26.
Coeficienții de fluaj sunt definiți de utilizator în proprietățile materialului și trebuie calculați conform EN 1992-1-1, Fig 3.1.
Armătură
Implicit, se consideră diagrama efort-deformație bilineară idealizată pentru barele de armătură neîncorporate în beton, definită în EN 1992-1-1, secțiunea 3.2.7 (Fig. 27). Definirea acestei diagrame necesită doar cunoașterea proprietăților de bază ale armăturii în faza de proiectare (rezistență și clasă de ductilitate). Ori de câte ori este cunoscut, poate fi luată în considerare relația reală efort-deformație a armăturii (laminată la cald, prelucrată la rece, călită și revenită, …). Diagrama efort-deformație a armăturii poate fi definită de utilizator, dar în acest caz este imposibil să se presupună efectul de participarea betonului întins (este imposibil să se calculeze deschiderea fisurilor). Utilizarea diagramei efort-deformație cu ramura superioară orizontală nu permite verificarea durabilității structurale. Prin urmare, verificarea manuală a cerințelor standard de ductilitate este necesară.

Participarea betonului întins (Fig. 28) este luată în considerare automat prin modificarea relației efort-deformație de intrare a barei de armătură neîncorporate în beton, pentru a surprinde rigiditatea medie a barelor înglobate în beton (εm).

Metoda Câmpului de Tensiuni Compatibil este conformă cu codurile de proiectare moderne. Deoarece modelele de calcul utilizează doar proprietăți standard ale materialelor, formatul factorilor parțiali de siguranță prescris în codurile de proiectare poate fi aplicat fără nicio adaptare. În acest fel, încărcările de intrare sunt majorate, iar proprietățile caracteristice ale materialelor sunt reduse folosind coeficienții de siguranță respectivi prescriși în codurile de proiectare, exact ca în analiza convențională a betonului. Valorile factorilor parțiali de siguranță ai materialelor prescriși în EN 1992-1-1 cap. 2.4.2.4 sunt setate implicit, dar utilizatorul poate modifica factorii de siguranță în setările Codului și ale calculului (Fig. 29).

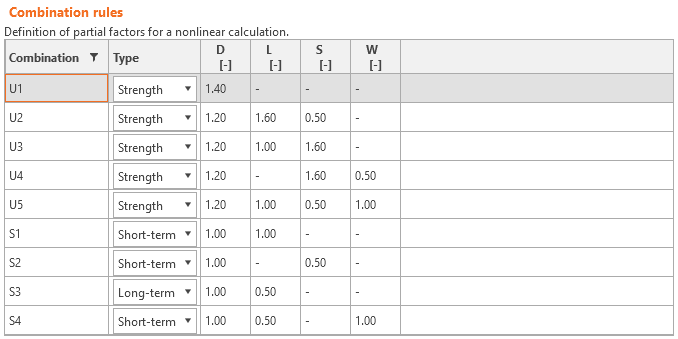
Factorii parțiali de siguranță ai încărcărilor trebuie definiți de utilizator în regulile de combinare pentru fiecare combinație neliniară de cazuri de încărcare (Fig. 30). Pentru toate șabloanele implementate în Idea StatiCa Detail, factorii parțiali de siguranță sunt deja predefiniti.
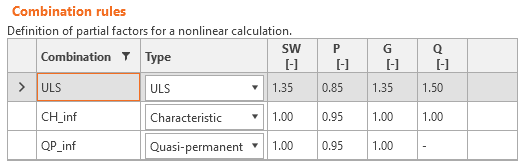
Prin utilizarea unor combinații definite de utilizator ale factorilor parțiali de siguranță, utilizatorii pot calcula cu CSFM folosind metoda factorului global de rezistență (Navrátil, et al. 2017), însă această abordare este rareori utilizată în practica de proiectare. Unele ghiduri recomandă utilizarea metodei factorului global de rezistență pentru analiza neliniară. Cu toate acestea, în analizele neliniare simplificate (cum ar fi CSFM), care necesită doar acele proprietăți ale materialelor utilizate în calculele manuale convenționale, este în continuare mai indicat să se utilizeze formatul factorilor parțiali de siguranță.
Diferitele verificări impuse de EN 1992-1-1 sunt evaluate pe baza rezultatelor directe furnizate de model. Verificările SLU sunt efectuate pentru rezistența betonului, rezistența armăturii și ancoraj (tensiuni de forfecare prin aderență).
Rezistența betonului la compresiune este evaluată ca raportul dintre tensiunea principală maximă de compresiune σc = σc2 obținută din analiza cu elemente finite și valoarea limită σc,lim = fcd.
Rezistența armăturii este evaluată atât la întindere, cât și la compresiune, ca raportul dintre tensiunea din armătură la fisuri σsr și valoarea limită specificată σs,lim:
unde:
fyk limita de curgere a armăturii conform EN 1992-1-1 Cl. 3.2.3,
k raportul dintre rezistența la întindere ftk și limita de curgere,
γs este factorul parțial de siguranță pentru armătură
Tensiunea de forfecare prin aderență este evaluată independent ca raportul dintre tensiunea de aderență τb calculată prin analiza cu elemente finite și rezistența ultimă la aderență fbd, conform EN 1992-1-1 cap. 8.4.2:
unde:
fctd este valoarea de calcul a rezistenței la întindere a betonului conform EN 1992-1-1 Cl. 3.1.6 (2). Datorită fragilității crescute a betonului de rezistență ridicată, fctk,0.05 este limitată la valoarea pentru C60/75 conform EN 1992-1-1 Cl. 8.4.2 (2)
η1 este un coeficient legat de calitatea condițiilor de aderență și de poziția barei în timpul betonării (Fig. 31).
η1 = 1,0 când se obțin condiții „bune" și
η1 = 0,7 pentru toate celelalte cazuri și pentru bare din elemente structurale executate cu cofraje glisante, cu excepția cazului în care se poate demonstra că există condiții de aderență „bune"
η2 este legat de diametrul barei:
η2 = 1,0 pentru Ø ≤ 32 mm
η2 = (132 - Ø)/100 pentru Ø > 32 mm

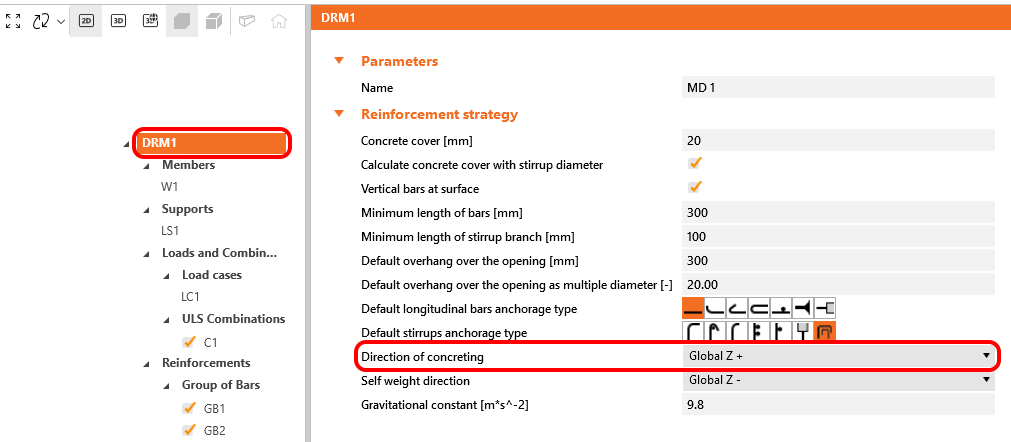
În IDEA StatiCa Detail condițiile de aderență sunt luate în considerare conform Fig. 31 c) și d). Direcția de betonare poate fi setată în aplicație pentru fiecare element al proiectului după cum urmează.
Aceste verificări sunt efectuate în raport cu valorile limită corespunzătoare pentru părțile respective ale structurii (adică, în ciuda utilizării unui singur grad atât pentru beton, cât și pentru armătură, diagramele finale efort-deformație vor diferi în fiecare parte a structurii datorită efectelor de participarea betonului întins și rezistența redusă a betonului comprimat).
Există, de asemenea, opțiunea de a modela bare netede. Mai multe informații pot fi găsite aici: Bare netede în Detail
Forța totală Ftot și Forța limită Flim
Forța totală Ftot este un rezultat al analizei cu elemente finite și poate fi definită în două moduri.
unde As este aria secțiunii transversale a barei de armătură și σs este tensiunea din bară.
Sau ca sumă a forței de ancoraj Fa și a forței de aderență Fbond.
unde Fa este forța reală din arcul de ancoraj și Fbond este forța de aderență care poate fi obținută prin integrarea tensiunii de aderență τb pe lungimea barei de armătură l.
Cs este circumferința barei de armătură.
Forța limită Flim este forța maximă în elementul barei de armătură, luând în considerare rezistența ultimă a barei și, de asemenea, condițiile de ancorare (aderența dintre beton și armătură și cârlige de ancoraj, bucle etc.).
unde Cs este circumferința barei de armătură, iar l este lungimea de la începutul barei până la punctul de interes.
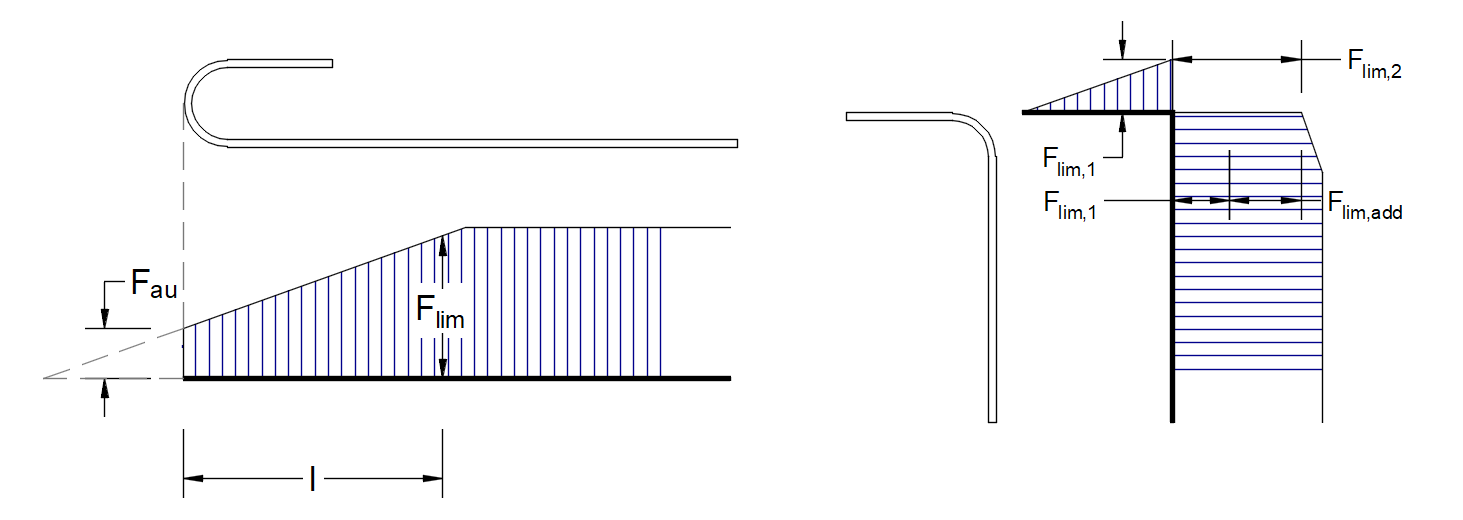
unde Flim,add este forța suplimentară calculată din mărimea unghiului dintre elementele vecine. Flim,2 trebuie să fie întotdeauna mai mică decât Fu.
Tipurile de ancoraj disponibile în CSFM includ o bară dreaptă (adică fără reducere la capătul de ancoraj), îndoire, cârlig, buclă, bară transversală sudată, aderență perfectă și bară continuă. Toate aceste tipuri, împreună cu coeficienții de ancoraj β corespunzători, sunt prezentate în Fig. 32 pentru armătura longitudinală și în Fig. 33 pentru etrieri. Valorile coeficienților de ancoraj adoptați sunt în conformitate cu EN 1992-1-1 secțiunea 8.4.4 Tab. 8.2. Trebuie remarcat că, în ciuda diferitelor opțiuni disponibile, CSFM distinge trei tipuri de capete de ancoraj: (i) fără reducere a lungimii de ancoraj, (ii) o reducere de 30% a lungimii de ancoraj în cazul unui ancoraj normalizat și (iii) aderență perfectă.


Pentru a respecta EN 1992-1-1, arcul de ancoraj trebuie utilizat în calcul; arcul de ancoraj este modificat prin coeficientul β, astfel încât utilizatorul trebuie să folosească unul dintre tipurile de ancoraj disponibile atunci când definește condițiile de început și de sfârșit ale armăturii.
La proiectarea structurilor din beton, întâlnim două mari grupe de zone parțial încărcate (PLA) - prima dintre acestea cuprinde reazeme, iar cealaltă constă în zone de ancoraj. Conform standardelor în vigoare pentru proiectarea structurilor din beton armat EN 1992-1-1 cap. 6.7 (Fig. 34), strivirea locală a betonului și forțele de întindere transversale trebuie luate în considerare pentru zonele parțial încărcate. Pentru o sarcină uniform distribuită pe o arie, Ac0, capacitatea de compresiune a betonului poate fi mărită de până la trei ori în funcție de aria de distribuție de calcul Ac1.

Zona parțial încărcată trebuie să fie suficient armată cu armătură transversală proiectată pentru a transmite forțele de despicare care apar în zonă. Pentru proiectarea armăturii transversale în zonele parțial încărcate, se utilizează metoda Bielă-tiranți conform Eurocodului. Fără armătura transversală necesară, nu este posibil să se ia în considerare creșterea capacității de compresiune a betonului.
Zone parțial încărcate în CSFM

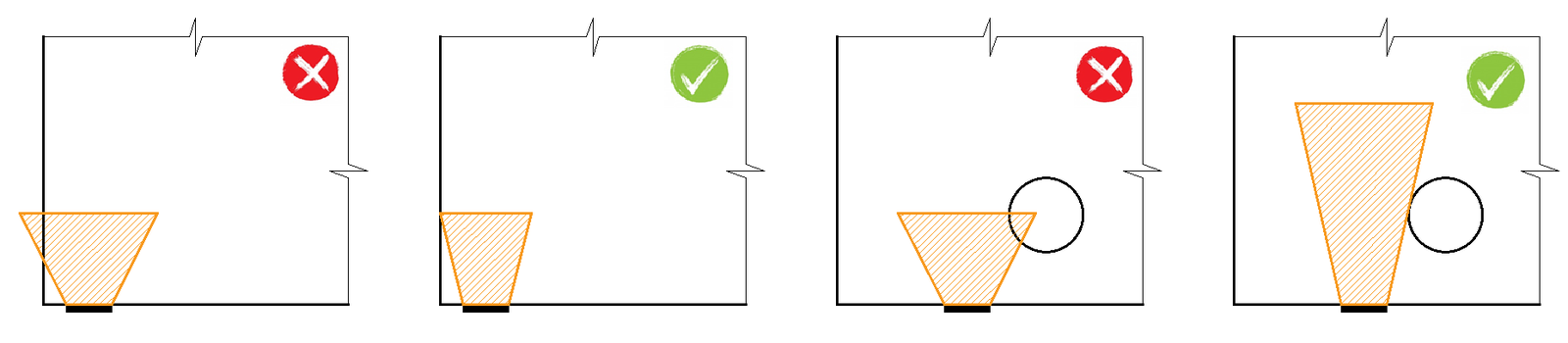
Utilizând CSFM, este posibil să se proiecteze și să se evalueze structuri din beton armat incluzând influența creșterii rezistenței la compresiune a betonului în zonele parțial încărcate. Deoarece CSFM este un model de perete (2D) și zonele parțial încărcate reprezintă o problemă spațială (3D), a fost necesară găsirea unei soluții care să combine aceste două tipuri diferite de probleme (Fig. 35). Dacă funcția „zone parțial încărcate" este activată, geometria conului admisibil este creată conform Eurocodului (Fig. 34). Toate coliziunile geometrice sunt rezolvate complet în 3D pentru geometria specificată a elementului din beton și dimensiunile fiecărei PLA. Ulterior, se creează un model de calcul al zonei parțial încărcate.
Modificarea modelului de material s-a dovedit a fi o abordare nepotrivită, în principal deoarece maparea proprietăților pe rețeaua de elemente finite este problematică. S-a stabilit că o abordare independentă de rețeaua de elemente finite reprezintă o soluție mai adecvată. Biele fictive perfect coerente sunt create pentru geometria conului de compresiune cunoscut (Fig. 35 și Fig. 37). Aceste biele au proprietăți de material identice cu betonul utilizat în model, inclusiv diagrama efort-deformație. Forma conului determină direcția bielelor, care distribuie treptat sarcina de pe PLA către aria de distribuție de calcul. Densitatea de arie a bielelor fictive este variabilă în fiecare parte a conului și adaugă o arie fictivă de beton în direcția sarcinii. La nivelul ariei încărcate (Ac0), o arie fictivă de beton este adăugată conform raportului (unde Areal este aria rezemului considerată în modelul de calcul 2D), iar această arie scade liniar la zero spre aria de distribuție de calcul (Ac1). Această soluție asigură că tensiunea de compresiune în beton este constantă pe întregul volum al conului.

Rezistența zonei parțial încărcate este mărită conform raportului dintre aria de distribuție de calcul și aria încărcată, prevăzut în EN 1992-1-1 (6.7). Trebuie reținut că acesta este un model de calcul care nu poate descrie cu precizie starea de tensiune dintr-o zonă parțial încărcată, al cărei flux real este mult mai complex. Cu toate acestea, această soluție permite distribuția corectă a sarcinii în întregul model, respectând totodată capacitatea portantă sporită a zonei parțial încărcate. În plus, introduce corect tensiunile transversale în această zonă.
La utilizarea funcției zone parțial încărcate pentru a simula creșterea capacității de compresiune a betonului, este necesară efectuarea separată a verificării conform codului conform EN 1992-1-1, secțiunea 6.7 (2). Forțele de întindere transversale (forțele de despicare) preluate de armătură sunt verificate automat.
Verificările SLS sunt efectuate pentru limitarea tensiunilor, lățimea fisurilor și limitele de deformație. Tensiunile sunt verificate în elementele de beton și armătură conform EN 1992-1-1, într-un mod similar cu cel specificat pentru SLU.
Limitarea tensiunilor
Tensiunea de compresiune în beton trebuie limitată pentru a evita fisurile longitudinale. Conform EN 1992-1-1 cap. 7.2 (2), fisurile longitudinale pot apărea dacă nivelul tensiunii sub combinația caracteristică de încărcări depășește valoarea k1fck. Tensiunea de compresiune în beton este evaluată ca raport între tensiunea principală maximă de compresiune σc = σc2 obținută din analiza cu Metoda Elementelor Finite pentru stările limită de serviciu și valoarea limită σc,lim. Astfel:
unde:
fck rezistența caracteristică la compresiune pe cilindru a betonului,
k1 =0.6.
Dacă tensiunea în beton sub încărcările cvasipermanente este mai mică decât k2fck conform EN 1992-1-1 Cl. 7.2(3), se poate presupune fluaj liniar. Dacă tensiunea în beton depășește k2fck, trebuie luat în considerare fluajul neliniar (a se vedea EN 1992-1-1 Cl. 3.1.4). În IDEA StatiCa Detail poate fi presupus doar fluajul liniar conform EN 1992-1-1 Cl. 3.1.4 (3) (a se vedea Modele de material (EN)).
Se poate presupune că fisurarea sau deformația inacceptabilă este evitată dacă, sub combinația caracteristică de încărcări, tensiunea de întindere în armătură nu depășește k3fyk (EN 1992-1-1 cap. 7.2 (5)). Rezistența armăturii este evaluată ca raport între tensiunea în armătură la fisuri σs = σsr și valoarea limită specificată σs,lim:
unde:
fyk limita de curgere a armăturii,
k3 =0.8.
Deformație
Deformațiile pot fi evaluate doar pentru pereți sau grinzi izostatice (static determinate) sau hiperstatice (static nedeterminate). În aceste cazuri, se ia în considerare valoarea absolută a deformațiilor (comparativ cu starea inițială înainte de încărcare), iar valoarea maximă admisibilă a deformațiilor trebuie stabilită de utilizator. Deformațiile la capetele tăiate nu pot fi verificate, deoarece acestea sunt în esență structuri instabile în care echilibrul este satisfăcut prin adăugarea forțelor la capete, iar deformațiile sunt astfel nerealiste. Deformația pe termen scurt uz,st sau pe termen lung uz,lt poate fi calculată și verificată față de valorile limită definite de utilizator:
unde:
uz deformația pe termen scurt sau lung calculată prin analiza cu Metoda Elementelor Finite,
uz,lim valoarea limită a deformației definită de utilizator.
Lățimea fisurilor
Lățimile și orientările fisurilor sunt calculate doar pentru efectele pe termen lung (folosind Ec,eff) pentru combinațiile în care evaluarea lățimii fisurilor este activată. Verificările bazate pe valorile limită specificate de utilizator în conformitate cu Eurocode sunt prezentate astfel:
unde:
w lățimea fisurii calculată prin analiza cu Metoda Elementelor Finite,
wlim valoarea limită a lățimii fisurii definită de utilizator.
Există două modalități de calcul al lățimilor fisurilor (fisurare stabilizată și nestabilizată). În cazul general (fisurare stabilizată), lățimea fisurii este calculată prin integrarea deformațiilor pe elementele 1D ale barelor de armătură. Direcția fisurii este apoi calculată din cele mai apropiate trei puncte de integrare (față de centrul elementului finit 1D al armăturii) ale elementelor 2D de beton. Deși această abordare pentru calculul direcțiilor fisurilor nu corespunde poziției reale a fisurilor, ea furnizează totuși valori reprezentative care conduc la rezultate ale lățimii fisurilor ce pot fi comparate cu valorile lățimii fisurilor impuse de cod la poziția barei de armătură.
5 Verificări structurale conform ACI 318-19
Evaluarea structurii utilizând CSFM se realizează prin două analize diferite: una pentru starea limită de serviciu și una pentru combinațiile de încărcări la rezistență. Analiza la starea limită de serviciu presupune că comportamentul sub încărcările factorizate este satisfăcător și că condițiile de curgere ale materialului nu vor fi atinse la nivelurile de încărcare de serviciu. Această abordare permite utilizarea unor modele constitutive simplificate (cu o ramură liniară a diagramei efort-deformație a betonului) pentru analiza la starea limită de serviciu, în scopul îmbunătățirii stabilității numerice și a vitezei de calcul.
CSFM este în conformitate cu ACI 318-19, capitolul 6.8.1.1. Pentru ca CSFM să îndeplinească cerințele din ACI 318-19, secțiunea 6.8.1.2, au fost efectuate numeroase teste de verificare la diverse universități. Articolele individuale care rezumă rezultatele verificării și validării pot fi găsite la următorul link.
Beton - Rezistență
Modelul de beton implementat pentru calculele de rezistență în CSFM se bazează pe curba parabolică-plastică efort-deformație pentru beton, bazată pe curba parabolică efort-deformație a Portland Cement Association, descrisă în Notele PCA privind ACI 318-99 Building Code Requirements for Structural Concrete, Figura 6-8. Rezistența la întindere este neglijată, ca în proiectarea clasică a betonului armat.
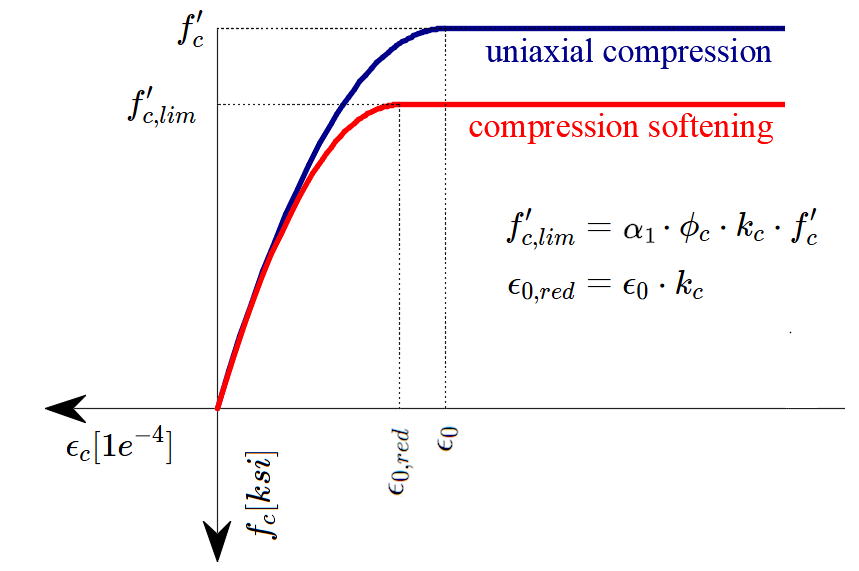
Implementarea CSFM în IDEA StatiCa Detail nu consideră un criteriu explicit de cedare în termeni de deformații pentru betonul comprimat (adică, după atingerea tensiunii de vârf, se consideră o ramură plastică cu εc0 la valoarea maximă de 5%, în timp ce ACI 318-19 Cl. 22.2.2.1 presupune o deformație ultimă mai mică de 0,3%). Această simplificare nu permite verificarea capacității de deformare a structurilor care cedează prin compresiune. Cu toate acestea, rezistența este corect estimată atunci când, pe lângă factorul betonului fisurat (kc2 definit în (Fig. 39)), creșterea fragilității betonului odată cu creșterea rezistenței sale este luată în considerare prin intermediul factorului de reducere definit în fib Model Code 2010 după cum urmează:
unde:
α1 este factorul de reducere a rezistenței la compresiune a betonului definit în ACI 318-19 Cl. 22.2.2.4.1. La utilizarea diagramei efort-deformație parabolă-dreptunghi, este necesar să se reducă tensiunea maximă de compresiune cu acest factor. Aceasta mediază distribuția tensiunilor în zona comprimată astfel încât rezistența la compresiune rezultantă să fie mai mică sau egală cu rezistența la compresiune calculată folosind o diagramă efort-deformație cu ramură plastică descrescătoare.
Φc este factorul de reducere a rezistenței pentru beton. Valoarea implicită este stabilită conform ACI 318-19 Tabelul 24.2.1 (b)(f).
kc2 este factorul de reducere datorat prezenței fisurării transversale.
f'c este rezistența pe cilindru a betonului (în MPa pentru definiția ).
kc2 este un factor de reducere bazat pe aceleași ipoteze ca și coeficientul zonei nodale βn dat în ACI 318-19 Tabelul 23.9.2, cu excepția faptului că în CSFM, prezența unei tensiuni principale de întindere perpendiculare pe tensiunea principală de compresiune este verificată pentru fiecare element finit (nu doar pentru nodurile modelului Bielă-tiranți).
Beton – Stare limită de serviciu
Analiza la starea limită de serviciu conține anumite simplificări ale modelelor constitutive utilizate pentru analiza de rezistență. Ramura plastică a curbei efort-deformație a betonului comprimat este neglijată, în timp ce ramura elastică este liniară și infinită. Legea rezistenței reduse a betonului comprimat nu este luată în considerare. Aceste simplificări îmbunătățesc stabilitatea numerică și viteza de calcul și nu reduc generalitatea soluției atât timp cât limitele de tensiune ale materialului rezultant la starea limită de serviciu sunt clar sub punctele de curgere (conform cerințelor ACI). Prin urmare, modelele simplificate utilizate pentru starea limită de serviciu sunt valabile numai dacă toate cerințele de verificare sunt îndeplinite.
Efecte pe termen lung
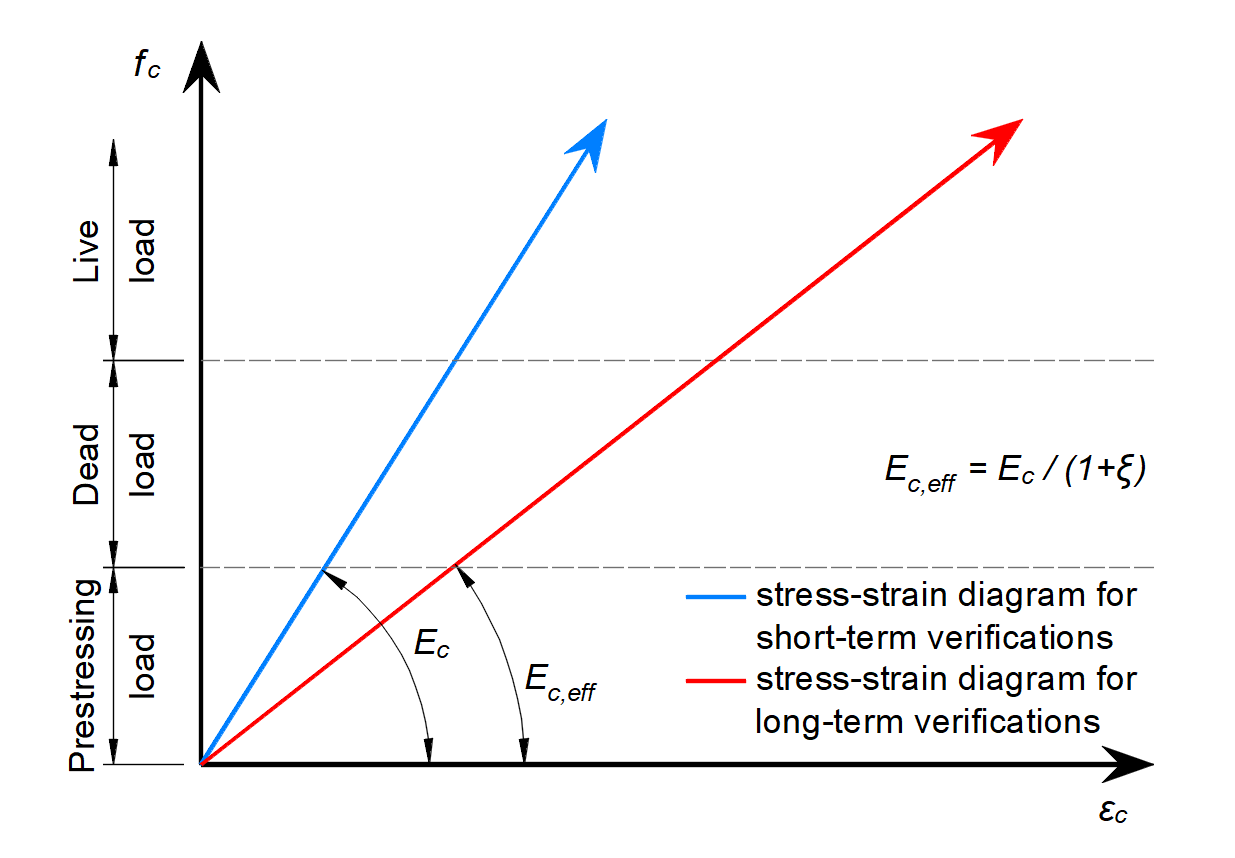
Comportamentul pe termen lung al structurii, cum ar fi săgețile pe termen lung sau calculul lățimilor fisurilor cauzate de încărcări permanente, este influențat de fluajul betonului. ACI 318-19 în paragraful 24.2.4.1.3 definește factorul dependent de timp pentru încărcările permanente – ξ, reprezentând efectul de fluaj pentru durata specificată a încărcării permanente.
În aplicația Detail, modulul de elasticitate Ec este ajustat pentru a determina comportamentul pe termen lung al structurii prin intermediul factorului ξ. Modulul de elasticitate ajustat este denumit Ec,eff – a se vedea Figura 40.
Presupunând că deformarea elementului este exprimată prin deformație, se poate scrie că:
unde:
ε0 este deformația pe termen scurt (fără influența fluajului) și εcreep este deformația cauzată de fluaj.
Folosind legea lui Hooke, putem scrie:
Substituind pentru și obținem:
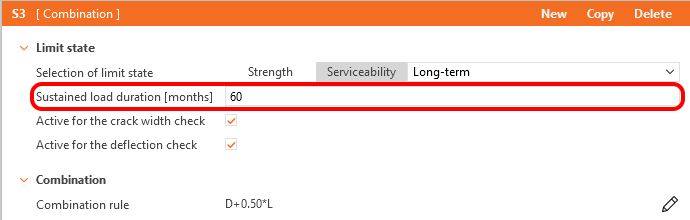
Durata încărcării permanente pentru determinarea factorului ξ poate fi setată individual pentru fiecare combinație de serviciu pe termen lung.
Săgețile, tensiunile și lățimile fisurilor dependente de timp sunt apoi calculate cu un model de material modificat, în care efectul rafinării la compresiune este luat în considerare automat prin natura analizei cu Metoda Elementelor Finite. Prin urmare, nu este necesar să se mai înmulțească cu factorul definit în 24.2.4.1.1.
Efecte pe termen scurt
Pentru efectuarea verificărilor pe termen scurt, se realizează un alt calcul în care toate încărcările sunt calculate fără factorul dependent de timp pentru încărcările permanente. Ambele calcule pentru verificările pe termen lung și scurt sunt reprezentate în Fig. 40.
Armătură
Se consideră o diagramă efort-deformație perfect elasto-plastică cu un punct de curgere definit pentru armătura nepretensionată, a se vedea ACI 319-19 CL. 20.2.1. Definirea acestei diagrame necesită cunoașterea doar a proprietăților de bază ale armăturii – rezistența și modulul de elasticitate.
Diagrama efort-deformație a armăturii poate fi definită și de utilizator, dar în acest caz este imposibil să se presupună efectul participării betonului întins (este imposibil să se calculeze lățimea fisurilor).
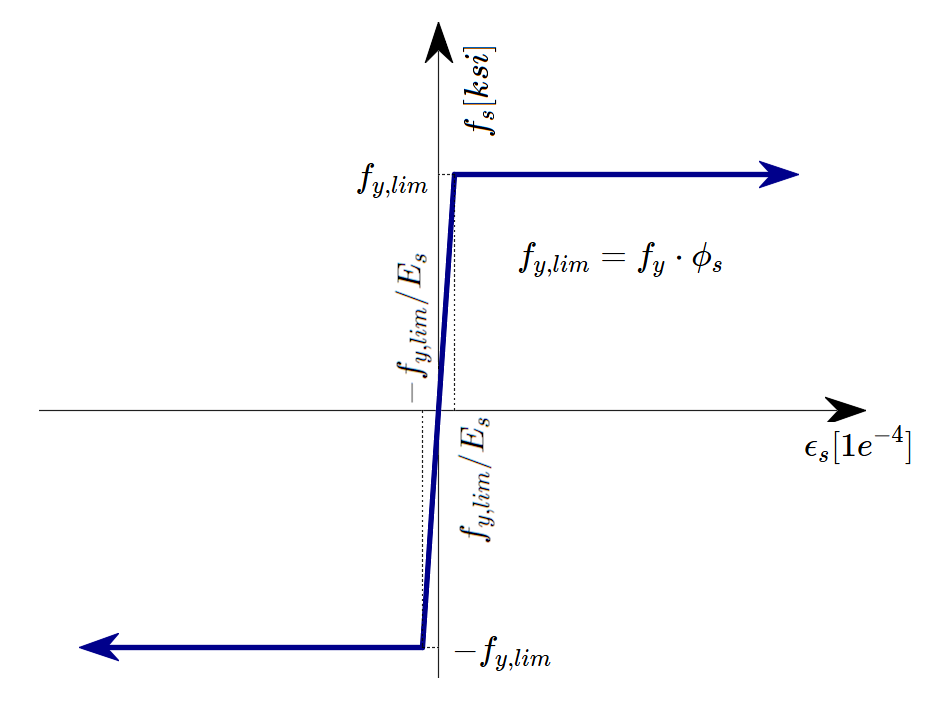
unde:
Φs este factorul de reducere a rezistenței pentru armătură. Valoarea implicită este stabilită conform ACI 318-19 Tabelul 24.2.1.
fy este rezistența la curgere a armăturii
Es modulul de elasticitate al armăturii
10% este selectat ca deformație limită la care calculul este oprit. Aceasta este considerată sigură pe baza ASTM A955/A955M-20c Articolul 7.
Participarea betonului întins (Fig. 43) este luată în considerare automat prin modificarea relației efort-deformație de intrare a barei de armătură libere, pentru a capta rigiditatea medie a barelor înglobate în beton (εm).
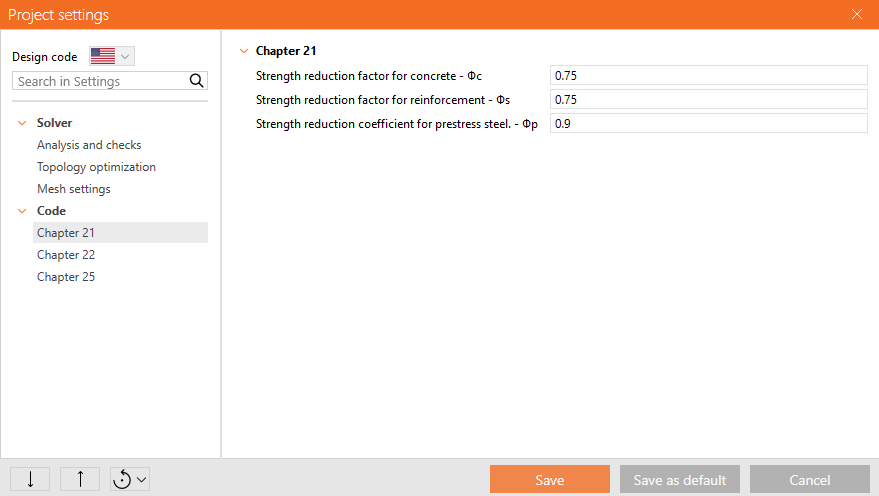
Metoda Câmpului de Tensiuni Compatibil este conformă cu codurile de proiectare moderne. Deoarece modelele de calcul utilizează doar proprietăți standard ale materialelor, formatul factorilor parțiali de siguranță prescris în codurile de proiectare poate fi aplicat fără nicio adaptare. În acest fel, încărcările de intrare sunt factorizate, iar proprietățile caracteristice ale materialelor sunt reduse folosind factorii de reducere a rezistenței corespunzători, exact ca în analiza convențională a betonului.
Valorile factorilor de reducere a rezistenței sunt prescrise în ACI 318-19 Cl. 21.2. Valorile implicite pentru beton și armătură sunt alese pe baza ipotezei că exemplul tipic rezolvat în aplicație este controlat de forfecare (conform Tabelului 21.2.1 (b), (f), (g)). Cu toate acestea, este posibil să se modeleze orice tip de element. Prin urmare, dacă se evaluează un element controlat de compresiune sau de întindere, utilizatorul are opțiunea de a modifica valoarea factorului de reducere a rezistenței în Preferințe.
Factorii de încărcare pentru combinațiile de rezistență trebuie definiți conform ACI 318-19 Tabelul 5.3.1.
Cu excepția celor prevăzute în Capitolul 34, combinațiile de încărcări la nivel de exploatare nu sunt definite în ACI 318-19. Se recomandă utilizarea regulilor de combinare bazate pe Anexa C a ASCE/SEI 7-16. Pentru toate șabloanele, factorii de încărcare sunt deja predefiniti.
Diferitele verificări impuse de ACI 318-19 sunt evaluate pe baza rezultatelor directe furnizate de model. Verificările sunt efectuate pentru rezistența betonului, rezistența armăturii și ancoraj (tensiuni de forfecare de aderență).
Rezistența betonului la compresiune este evaluată ca raportul dintre tensiunea principală maximă de compresiune fc (denumită și σ2 în Rezultatele auxiliare) obținută din analiza cu elemente finite și valoarea limită f'c,lim.
Rezistența armăturii este evaluată atât la întindere, cât și la compresiune, ca raportul dintre tensiunea din armătură la fisuri fs și valoarea limită specificată fy,lim.
Tensiunea de forfecare de aderență este evaluată independent ca raportul dintre tensiunea de aderență τb calculată prin analiza cu elemente finite și rezistența de aderență fbu.
Cu toate acestea, standardul ACI nu abordează explicit rezistența de aderență, ci lucrează cu calculul așa-numitei lungimi de ancorare, descrisă în Secțiunea 25.4.2. Deoarece rezistența de aderență este un parametru de intrare fundamental pentru determinarea lungimii de ancorare, a se vedea R25.4.1.1 și ACI Committee 408 1966, rezistența de aderență poate fi calculată după cum urmează:
Să presupunem că, dacă ancorăm bara de armătură într-un bloc de beton pe lungimea de ancorare ld sau mai mare, extragerea armăturii va conduce la ruperea armăturii și nu la smulgerea din beton. Aceasta poate fi exprimată prin formula următoare.
unde:
db este diametrul barei de armătură, ld este lungimea de ancorare, fbu este rezistența de aderență, fy este limita de curgere a armăturii, iar As este aria secțiunii transversale a barei de armătură.
Din cele de mai sus, formula pentru calculul rezistenței de aderență poate fi dedusă cu ușurință:
Lungimea de ancorare ld este determinată conform ACI 318-19 Tabelul 25.4.2.3 după cum urmează:
unde:
C = 25 (2,1 pentru sistemul metric) pentru bare nr. 6 și mai mici și sârme profilate, C = 20 (1,7 pentru sistemul metric) pentru bare nr. 7 și mai mari, λ = 1,0 pentru beton de greutate normală, ψt, ψe, ψg sunt determinate conform ACI 318-19 Tabelul 25.4.2.3.
Este suportată doar armătura neacoperită sau zincată (galvanizată), deci ψe = 1,0. ψg este determinat automat din clasa armăturii, iar ψt este derivat automat din poziția armăturii în model și din direcția de betonare, care poate fi setată în aplicație pentru fiecare element de proiect după cum urmează.
Aceste verificări sunt efectuate în raport cu valorile limită corespunzătoare pentru părțile respective ale structurii (adică, în ciuda utilizării unei singure clase atât pentru beton, cât și pentru armătură, diagramele finale efort-deformație vor diferi în fiecare parte a structurii datorită efectelor de participarea betonului întins și rezistența redusă a betonului comprimat).
Există, de asemenea, opțiunea de a modela bare netede. Mai multe informații pot fi găsite aici: Bare netede în Detail
Forța totală Ftot și forța limită Flim
Forța totală Ftot este un rezultat al analizei cu elemente finite și poate fi definită în două moduri.
unde As este aria secțiunii transversale a barei de armătură și fs este tensiunea din bară.
Sau ca sumă a forței de ancoraj Fa și a forței de aderență Fbond.
unde Fa este forța reală din arcul de ancoraj, iar Fbond este forța de aderență care poate fi obținută prin integrarea tensiunii de aderență τb pe lungimea barei de armătură l.
Cs este circumferința barei de armătură.
Forța limită Flim este forța maximă în elementul barei de armătură, luând în considerare rezistența barei și, de asemenea, condițiile de ancorare (aderența dintre beton și armătură și cârlige de ancoraj, bucle etc.).
unde Cs este circumferința barei de armătură, iar l este lungimea de la începutul barei până la punctul de interes.
unde Flim,add este forța suplimentară calculată din mărimea unghiului dintre elementele vecine. Flim,2 trebuie să fie întotdeauna mai mică decât Fu.
Tipurile de ancoraj disponibile în CSFM includ bara dreaptă (adică fără reducerea capătului de ancoraj), cârlig la 90 de grade, cârlig la 180 de grade, aderență perfectă și bară continuă. Toate aceste tipuri, împreună cu coeficienții de ancoraj β corespunzători, sunt prezentate în Fig. 48 pentru armătura longitudinală. Valorile coeficienților de ancoraj adoptați sunt derivate din compararea ecuației din secțiunea ACI 318-19 25.4.3.1 și a ecuațiilor preluate din secțiunea ACI 318-19 25.4.2.3. Trebuie remarcat că, în ciuda diferitelor opțiuni disponibile, CSFM distinge trei tipuri de capete de ancoraj: (i) fără reducerea lungimii de ancoraj, (ii) o reducere de 30% a lungimii de ancoraj în cazul unui ancoraj normalizat și (iii) aderență perfectă.

Coeficientul de ancoraj pentru etrieri este întotdeauna - β = 1,0.
Pentru a respecta cerințele ACI, arcul de ancoraj trebuie utilizat în calcul; arcul de ancoraj este modificat prin coeficientul β, astfel încât utilizatorul trebuie să folosească unul dintre tipurile de ancoraj disponibile atunci când definește condițiile de început și de sfârșit ale armăturii.
La proiectarea structurilor din beton, întâlnim două mari grupe de zone parțial încărcate (ZPI) – prima dintre acestea cuprinde reazeme, iar cealaltă constă în zone de ancoraj.
Conform standardelor în vigoare pentru proiectarea structurilor din beton armat ACI 318-19 cap. 22.8, strivirea locală a betonului și forțele de întindere transversale trebuie luate în considerare pentru reazeme. Pentru o sarcină uniform distribuită pe o arie, Ac1, capacitatea de compresiune a betonului poate fi mărită de până la două ori în funcție de aria de distribuție de calcul Ac2. A se vedea tabelul ACI 318-19 22.8.3.2.
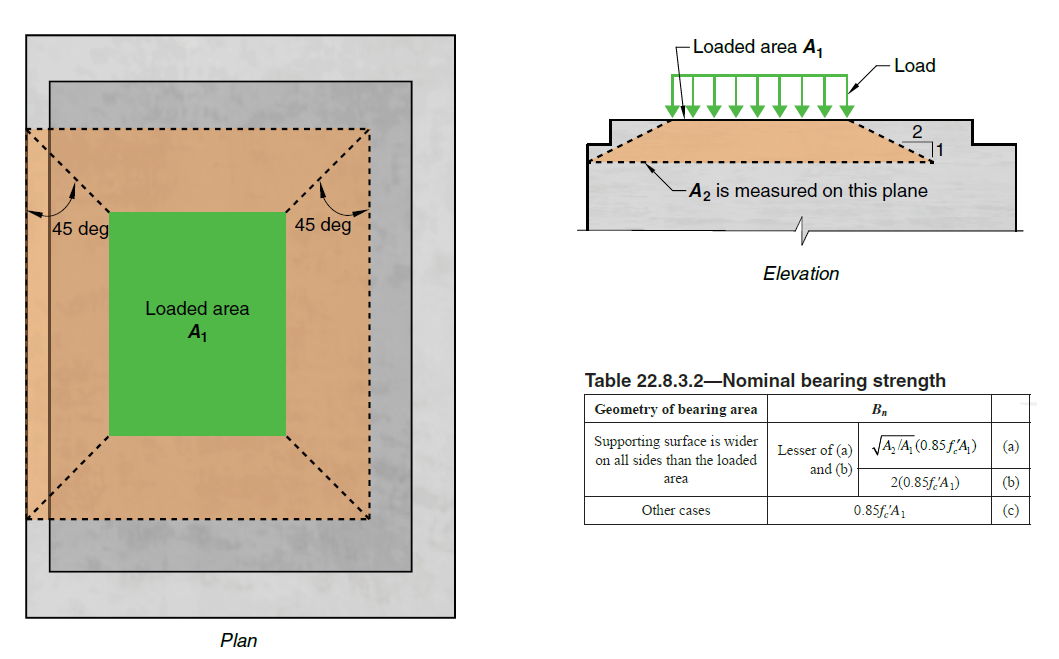
Pentru zonele de ancoraj post-tensionate, trebuie respectat ACI 318-19 cap. 25.9.
Zona parțial încărcată trebuie să fie suficient armată cu armătură transversală proiectată pentru a transmite forțele de despicare care apar în zonă. Fără armătura transversală necesară, nu este posibil să se ia în considerare creșterea capacității de compresiune a betonului.
Zone parțial încărcate în CSFM
Utilizând CSFM, este posibil să se proiecteze și să se evalueze structuri din beton armat incluzând influența rezistenței la compresiune crescute a betonului în zonele parțial încărcate. Deoarece CSFM este un model de perete (2D), iar zonele parțial încărcate reprezintă o problemă spațială (3D), a fost necesară găsirea unei soluții care să combine aceste două tipuri diferite de probleme (Fig. 50). Dacă funcția „zone parțial încărcate" este activată, geometria conului admisibil este creată conform ACI (Fig. 49). Toate coliziunile geometrice sunt rezolvate complet în 3D pentru geometria elementului din beton specificat și dimensiunile fiecărei ZPI. Ulterior, se creează un model de calcul al zonei parțial încărcate.
Modificarea modelului de material s-a dovedit a fi o abordare nepotrivită, în principal deoarece maparea proprietăților pe plasa de elemente finite este problematică. S-a stabilit că o abordare independentă de plasa de elemente finite reprezintă o soluție mai adecvată. Biele fictive perfect coerente sunt create pentru geometria conului de compresiune cunoscut (Fig. 51 și Fig. 52). Aceste biele au proprietăți de material identice cu betonul utilizat în model, inclusiv diagrama efort-deformație. Forma conului determină direcția bielelor, care distribuie treptat sarcina de pe ZPI către aria de distribuție de calcul. Densitatea de arie a bielelor fictive este variabilă în fiecare parte a conului și adaugă o arie fictivă de beton în direcția sarcinii. La nivelul ariei încărcate (Ac1), o arie fictivă de beton este adăugată conform raportului (unde Areal este aria rezemului considerată în modelul de calcul 2D), iar această arie scade liniar la zero spre aria de distribuție de calcul (Ac2). Această soluție asigură că tensiunea de compresiune în beton este constantă pe întregul volum al conului.
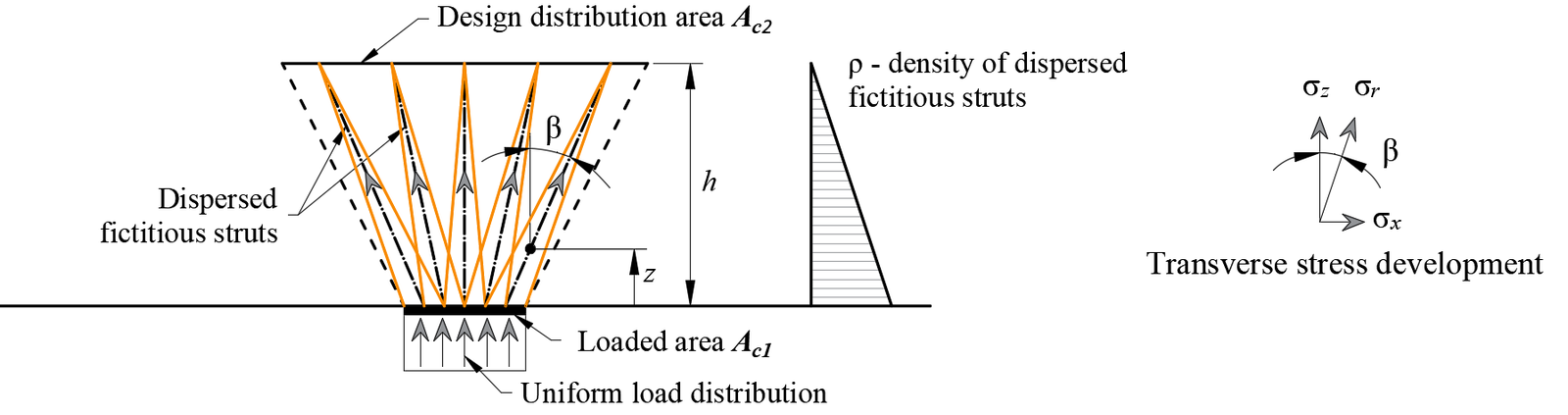
Rezistența zonei parțial încărcate este mărită conform raportului dintre aria de distribuție de calcul și aria încărcată, prevăzut în ACI 318-19 cap. 22.8. Trebuie reținut că acesta este un model de calcul care nu poate descrie cu precizie starea de tensiune dintr-o zonă parțial încărcată, al cărei flux real este mult mai complex. Cu toate acestea, această soluție permite distribuția corectă a sarcinii pe întregul model, respectând totodată capacitatea portantă crescută a zonei parțial încărcate. În plus, introduce corect tensiunile transversale în această zonă pentru a proiecta corect armătura la forțele de despicare.
Tensiunea admisibilă de reazem de 0.85fc' este indicată în Tabelul 22.8.3.2. Densitatea este limitată astfel încât capacitatea dublă maximă indicată în formula din Tabelul 22.8.3.2(b) să nu fie depășită.
Pentru zonele de ancoraj, ZPI este utilizată în același mod ca pentru reazeme în aplicație. De aceea, zonele locale definite în ACI 318-19 capitolul 25.9 trebuie verificate manual conform ACI 318-19 25.9.3. ZPI este, prin urmare, utilizată doar pentru a evita depășirea criteriului de deformație în zona locală și astfel oprirea prematură a calculului. Pe de altă parte, conform ACI 318-19, Cl. 25.9.4.3.1 (b), armătura care rezistă la tensiunile de despicare și exfoliere în plan poate fi verificată direct și avantajos în aplicație.
Verificările la starea limită de serviciu sunt efectuate pentru limitarea tensiunilor, lățimea fisurilor și limitele de deformație. Tensiunile sunt verificate în elementele de beton și armătură conform ACI 318-19, într-un mod similar cu cel specificat pentru Rezistență.
Limitarea tensiunilor
Tensiunile de compresiune admisibile în beton la încărcările de serviciu trebuie verificate pentru elementele precomprimate de Clasa U și T. Pe baza Tabelului R24.5.2.1, nu este necesară verificarea limitării tensiunilor pentru betonul care se presupune că este fisurat. Utilizatorul trebuie să seteze clasa elementului precomprimat în setările elementului de calcul.
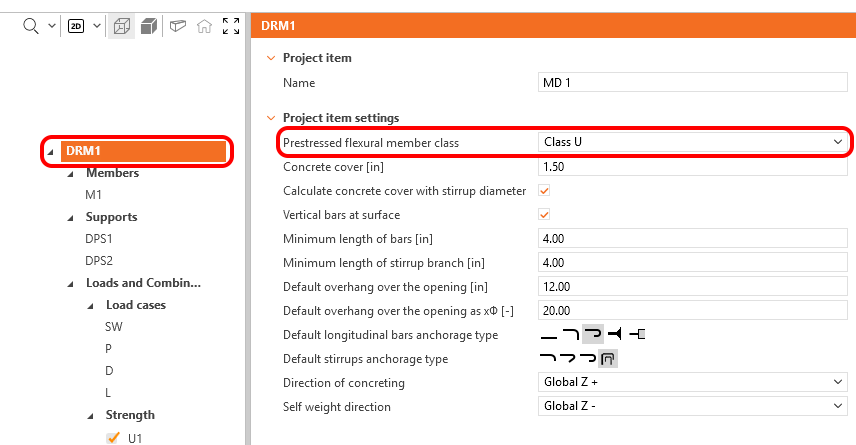
Tensiunea de compresiune admisibilă pentru elementele supuse la încărcări tranzitorii este specificată de ACI 318-19 24.5.4.1 ca 0.6fc'. Limita tensiunii de compresiune de 0.45fc' a fost stabilită pentru a reduce probabilitatea de cedare a elementelor din beton precomprimat sub acțiunea încărcărilor repetate. Această limită a părut, de asemenea, rezonabilă pentru a preveni deformațiile excesive prin fluaj. La valori mai mari ale tensiunii, deformațiile de fluaj tind să crească mai rapid pe măsură ce tensiunea aplicată crește.
Tensiunea de compresiune în beton este evaluată ca raport între tensiunea principală de compresiune maximă fc = σc2 obținută din analiza prin Metoda Elementelor Finite pentru starea limită de serviciu și valoarea limită, care este stabilită pe baza Tabelului 24.5.4.1.
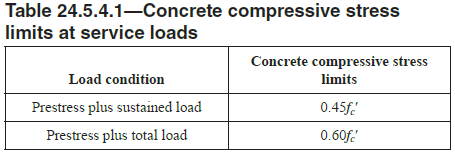
În aplicație, Precomprimare plus încărcare permanentă este tratată ca o combinație pe termen lung, iar Precomprimare plus încărcare totală ca o combinație pe termen scurt.
Deformație
În funcție de tipul de combinație selectat (pe termen lung sau pe termen scurt), se evaluează fie deformația pe termen lung, fie cea pe termen scurt. Valoarea maximă admisibilă a deformației trebuie determinată de utilizator și trebuie luată în considerare în conformitate cu ACI 138-19 24.2.

În aplicație, este posibil să se afișeze deformațiile din încărcarea permanentă ΔDL și din încărcarea variabilă ΔLL separat, precum și deformația totală ΔTot (permanentă+variabilă), afișând totodată forma deformată.
Deformațiile la capetele tăiate nu pot fi verificate.
Lățimea fisurilor
Lățimile și orientările fisurilor sunt calculate pentru combinațiile de serviciu pe termen scurt sau pe termen lung. Deoarece ACI nu prescrie direct lățimi limită ale fisurilor, utilizatorul trebuie să specifice o lățime limită a fisurii wlim.
Verificările sunt prezentate după cum urmează:
unde:
w lățimea fisurii pe termen scurt sau lung calculată prin analiza cu Metoda Elementelor Finite,
wlim valoarea limită a lățimii fisurii definită de utilizator.
Metoda de calcul a lățimilor fisurilor utilizată în aplicație, descrisă mai detaliat și în acest document, este în conformitate cu ACI 224R-01. Prin urmare, este posibil să se utilizeze Tabelul 4.1 din ACI 224R-01 pentru a determina valoarea limită a lățimilor fisurilor.
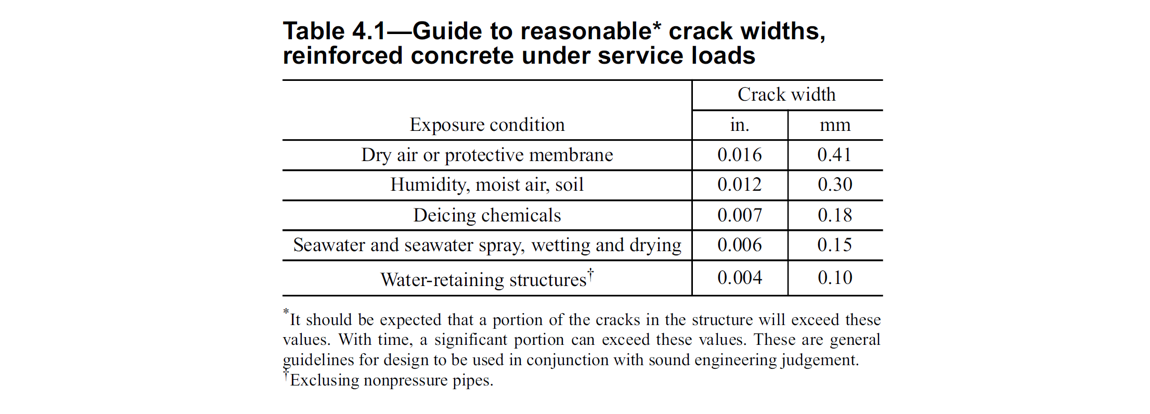
Există două metode de calcul al lățimilor fisurilor (fisurare stabilizată și nonstabilizată). În cazul general (fisurare stabilizată), lățimea fisurii este calculată prin integrarea deformațiilor pe elementele 1D ale barelor de armătură. Direcția fisurii este apoi calculată din cele mai apropiate trei puncte de integrare (față de centrul elementului finit 1D de armătură dat) ale elementelor 2D de beton. Deși această abordare pentru calculul direcțiilor fisurilor nu corespunde poziției reale a fisurilor, ea furnizează totuși valori reprezentative care conduc la rezultate ale lățimii fisurilor ce pot fi comparate cu valorile lățimii fisurilor impuse de cod la poziția barei de armătură.
6 Verificări structurale conform AASHTO
Beton - Rezistență
Modelul de beton implementat pentru calculele de rezistență în CSFM se bazează pe ipotezele de proiectare la rezistență AASHTO LRFD privind echilibrul și compatibilitatea deformațiilor. În conformitate cu AASHTO LRFD (2024) Articolul 5.6.2.1, rezistența la întindere a betonului este neglijată.
Implementarea CSFM în IDEA StatiCa Detail nu consideră un criteriu explicit de cedare în termeni de deformații pentru betonul comprimat (adică, după atingerea tensiunii de vârf, se consideră o ramură plastică cu εc0 la valoarea maximă de 5%, în timp ce AASHTO LRFD (2024) Articolul 5.6.2.1 presupune o deformație ultimă mai mică de 0,3%). Această simplificare nu permite verificarea capacității de deformare a structurilor care cedează prin compresiune. Cu toate acestea, rezistența este corect estimată atunci când, pe lângă factorul betonului fisurat (kc2 definit în (Fig. 57)), creșterea fragilității betonului odată cu creșterea rezistenței sale este luată în considerare prin intermediul factorului de reducere definit în fib Model Code 2010 după cum urmează:
unde:
α1 este factorul de reducere a rezistenței la compresiune a betonului definit în AASHTO LRFD (2024) Articolul 5.6.2.2. La utilizarea diagramei efort-deformație parabolă-dreptunghi, este necesar să se reducă tensiunea maximă de compresiune cu acest factor. Aceasta mediază distribuția tensiunilor în zona comprimată astfel încât rezistența la compresiune rezultantă să fie mai mică sau egală cu rezistența la compresiune calculată folosind o diagramă efort-deformație cu ramură plastică descrescătoare.
Φc este factorul de rezistență pentru beton. Valoarea implicită este stabilită conform AASHTO LRFD (2024) Articolul 5.5.4.2.
kc2 este factorul de reducere datorat prezenței fisurării transversale.
f'c este rezistența cilindrică a betonului (în MPa pentru definiția ).
kc2 este un factor de reducere bazat pe aceleași ipoteze ca factorul de eficiență al betonului ν dat în AASHTO LRFD (2024) 5.8.2.5.3a și Tabelul 5.8.2.5.3a-1, cu excepția faptului că în CSFM, prezența unei tensiuni principale de întindere perpendiculară pe tensiunea principală de compresiune este verificată pentru fiecare element finit (nu doar pentru nodurile modelului Bielă-tiranți).
Beton – Stare limită de serviciu
Analiza la starea limită de serviciu conține anumite simplificări ale modelelor constitutive utilizate pentru analiza de rezistență. Ramura plastică a curbei efort-deformație a betonului comprimat este neglijată, în timp ce ramura elastică este liniară și infinită. Legea rezistenței reduse a betonului comprimat nu este luată în considerare. Aceste simplificări îmbunătățesc stabilitatea numerică și viteza de calcul și nu reduc generalitatea soluției atât timp cât limitele de tensiune ale materialului la starea limită de serviciu sunt clar sub punctele de curgere. (conform abordării AASHTO LRFD pentru starea limită de serviciu). Prin urmare, modelele simplificate utilizate pentru starea limită de serviciu sunt valabile numai dacă toate cerințele de verificare sunt îndeplinite.
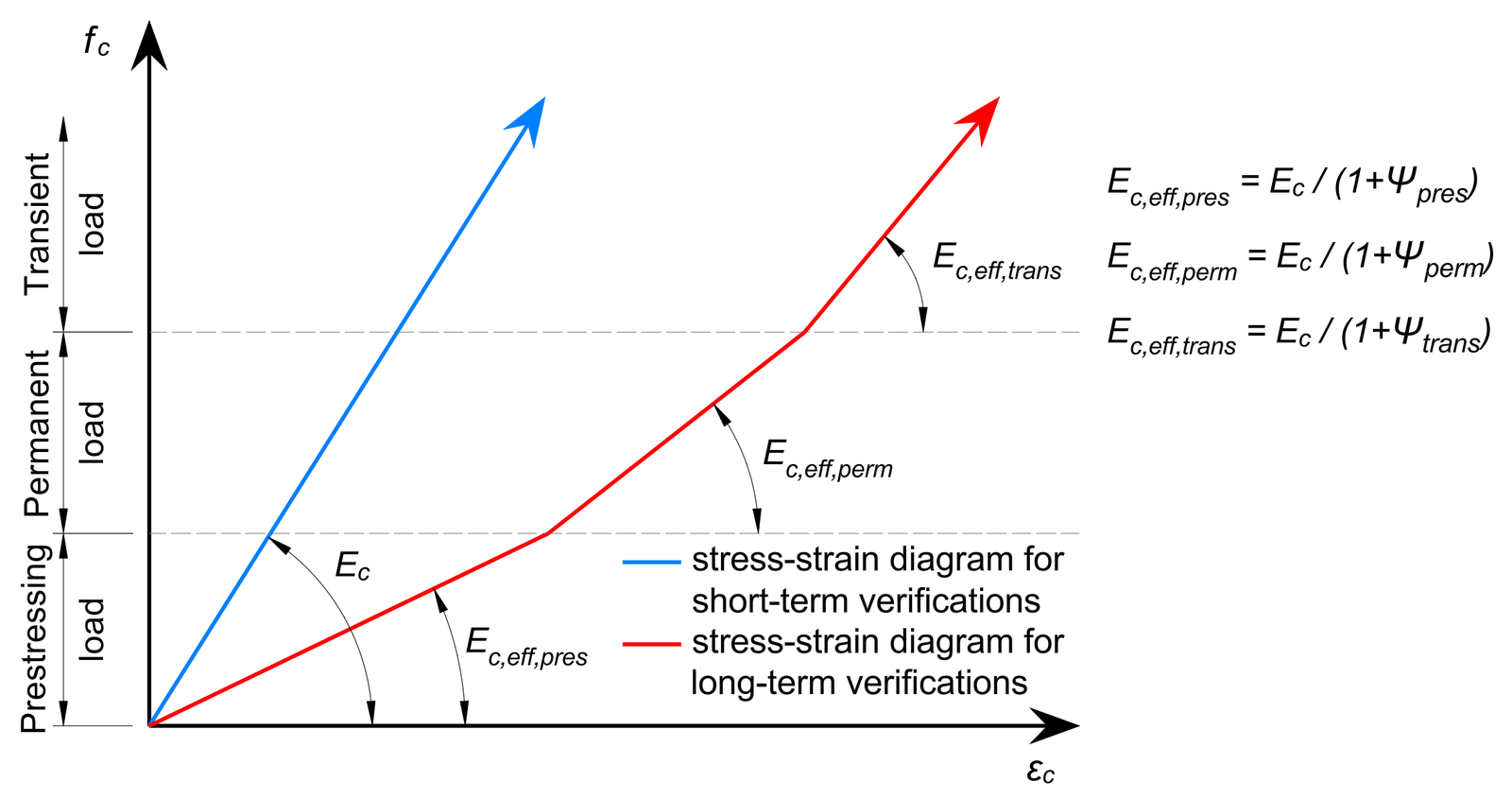
Efecte pe termen lung
Legea constitutivă pe termen lung (curba roșie din Fig. 59) este utilizată pentru calculul lățimii fisurilor, deformației totale și limitării tensiunilor elementelor precomprimate atunci când efectul pe termen lung este selectat în bara de instrumente superioară. În aplicația IDEA StatiCa Detail, modulul de elasticitate efectiv este utilizat pentru verificarea efectelor pe termen lung, conform AASHTO LRFD (2024) C5.12.5.3.6-1.
unde:
Ec este modulul de elasticitate definit în AASHTO LRFD (2024) articolul 5.4.2.4
ψ este coeficientul de fluaj definit în AASHTO LRFD (2024) articolul 5.4.2.3.2
Factorii de fluaj sunt definiți de utilizator în proprietățile materialului.
Efecte pe termen scurt
Pentru efectuarea verificărilor pe termen scurt, se realizează un calcul suplimentar în care toate încărcările sunt calculate fără factorul de fluaj. Ambele calcule pentru verificările pe termen lung și scurt sunt reprezentate în Fig. 59.
Armătură
Se consideră o diagramă efort-deformație perfect elasto-plastică cu un punct de curgere definit pentru armătura nepretensionată, conform AASHTO LRFD (2024) Articolul 5.4.3. Definirea acestei diagrame necesită cunoașterea doar a proprietăților de bază ale armăturii – rezistența și modulul de elasticitate.
Diagrama efort-deformație a armăturii poate fi definită și de utilizator, dar în acest caz este imposibil să se presupună efectul de participarea betonului întins (este imposibil să se calculeze lățimea fisurilor).
unde:
Φs este factorul de rezistență pentru armătură. Valoarea implicită este stabilită conform AASHTO LRFD (2024) Articolul 5.5.4.2.
fy este limita de curgere a armăturii
Es modulul de elasticitate al armăturii
10% este selectat ca deformație limită la care calculul este oprit. Aceasta este considerată sigură conform ASTM A955/A955M-20c Articolul 7.
Participarea betonului întins (Fig. 61) este luată în considerare automat prin modificarea relației efort-deformație de intrare a barei de armătură libere, pentru a capta rigiditatea medie a barelor înglobate în beton (εm).
Metoda Câmpului de Tensiuni Compatibil este conformă cu codurile de proiectare moderne. Deoarece modelele de calcul utilizează doar proprietăți standard ale materialelor, formatul factorilor parțiali de siguranță prescris în codurile de proiectare poate fi aplicat fără nicio adaptare. În acest fel, încărcările de intrare sunt factorizate, iar proprietățile caracteristice ale materialelor sunt reduse folosind factorii de rezistență corespunzători, exact ca în analiza convențională a betonului.
Valorile factorilor de rezistență sunt prescrise în AASHTO LRFD (2024), Articolul 5.5.4. Valorile implicite pentru beton și armătură sunt alese în mod conservativ, pe baza ipotezei că exemplul tipic rezolvat este o zonă D - un caz tipic pentru metoda Bielă-tiranți. Cu toate acestea, este posibil să se modeleze orice tip de element. Prin urmare, dacă se evaluează un element controlat de compresiune sau de întindere, utilizatorul are opțiunea de a modifica valoarea factorului de reducere a rezistenței în Preferințe.
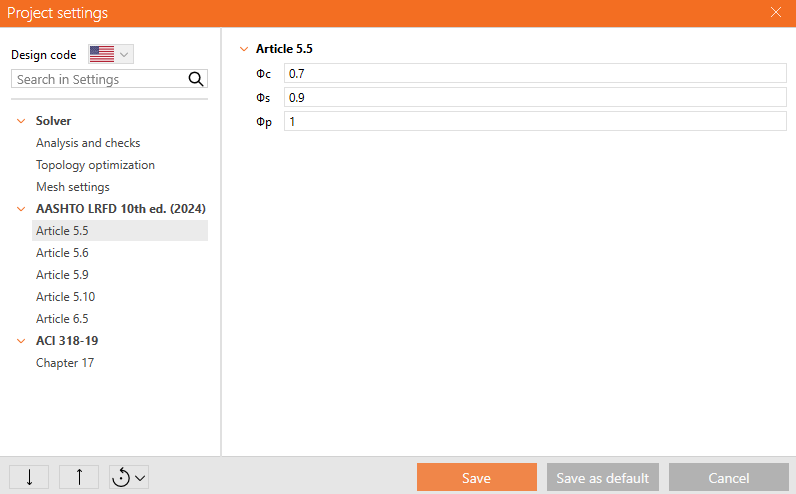
Factorii de încărcare și combinațiile de încărcări trebuie definite conform AASHTO LRFD Bridge Design Specifications (2024), Articolul 3.4.1 și Tabelele 3.4.1-1 până la 3.4.1-6. AASHTO LRFD specifică explicit combinațiile de încărcări pentru starea limită de rezistență (Strength I până la Strength V), precum și combinațiile de încărcări la nivel de serviciu (Service I până la Service IV), inclusiv factorii de încărcare corespunzători pentru fiecare caz.
Pentru fiecare șablon, programul include combinații de bază predefinite care necesită completare în funcție de elementul procesat.
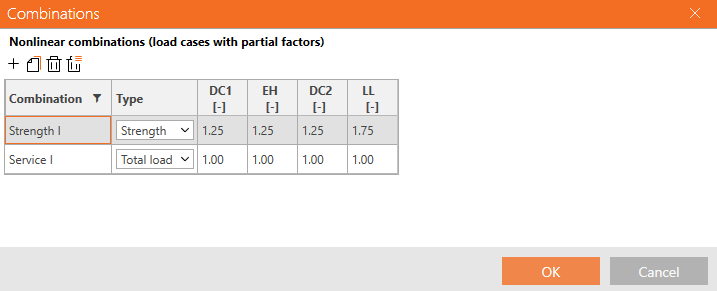
Diferitele verificări impuse de AASHTO sunt evaluate pe baza rezultatelor directe furnizate de model. Verificările sunt efectuate pentru rezistența betonului, rezistența armăturii și ancoraj (tensiuni de forfecare de aderență).
Rezistența betonului la compresiune este evaluată ca raport între tensiunea principală maximă de compresiune fc (denumită și σ2 în rezultatele auxiliare) obținută din analiza cu elemente finite și valoarea limită f'c,lim.
Rezistența armăturii este evaluată atât la întindere, cât și la compresiune, ca raport între tensiunea din armătură la fisuri fs și valoarea limită specificată fy,lim.
Tensiunea de forfecare de aderență este evaluată independent ca raport între tensiunea de aderență τb calculată prin analiza cu elemente finite și rezistența la aderență fbu.
Deoarece rezistența la aderență nu este definită explicit în AASHTO, valoarea sa trebuie determinată folosind ecuațiile care definesc lungimea de ancorare. Rezistența la aderență reprezintă, de fapt, datele de intrare principale pentru determinarea lungimii de ancorare; a se vedea, de exemplu, articolul AASHTO LRFD (2024) C5.10.8.2 sau NCHRP Report 733, Anexa E, pagina E-9.
Calculul descris în AASHTO LRFD (2024) Articolele 5.10.8.2.1 și 5.10.8.2.2, care necesită cunoașterea distanței maxime dintre axele armăturii transversale în interiorul lungimii ld, a numărului de bare sau sârme ancorate de-a lungul planului de fisurare prin despicere, a ariei totale a secțiunii transversale a tuturor armăturilor transversale și a altor mărimi geometrice care nu pot fi determinate în mod fiabil în modelul aplicației Detail pentru date de intrare generale, a fost adoptată o abordare din AASHTO LRFD (2014) Articolul 5.11.2.1.1, după cum urmează:
Se presupune că, dacă ancorăm bara de armătură într-un bloc de beton pe lungimea de ancorare ld sau mai mare, extragerea armăturii va conduce la ruperea armăturii și nu la smulgerea din beton. Aceasta poate fi exprimată prin formula următoare.
unde:
- db este diametrul barei de armătură
- ld este lungimea de ancorare
- fbu este rezistența la aderență
- fy este limita de curgere a armăturii
- Ab este aria secțiunii transversale a barei de armătură
Din cele de mai sus, formula pentru calculul rezistenței la aderență poate fi dedusă cu ușurință.
Lungimea de bază a ancorării la întindere ldb este determinată în AASHTO LRFD (2014) Articolul 5.11.2.1.1 după cum urmează:
Pentru bare Nr. 11 și mai mici:
Pentru bare Nr. 14:
Pentru bare Nr. 18:
unde:
- Ab este aria secțiunii transversale a barei de armătură (in2)
- fy este limita de curgere specificată a armăturii (ksi)
- f'c rezistența la compresiune specificată a betonului la 28 de zile, cu excepția cazului în care se specifică o altă vârstă (ksi)
- db este diametrul barei de armătură (in)
Apoi, prin înmulțirea lungimii de bază a ancorării ldb cu factorii descriși în AASHTO LRFD (2014) Articolele 5.11.2.1.2 și 5.11.2.1.3, se determină lungimea de ancorare ld ca date de intrare.
Factorii de modificare care reduc lungimea de ancorare conform 5.11.2.1.3 sunt întotdeauna egali cu 1,0 în aplicație. Factorul de modificare pentru armătura orizontală superioară sau aproape orizontală este egal cu 1,4 pentru condiții de aderență „slabă", conform figurii următoare:
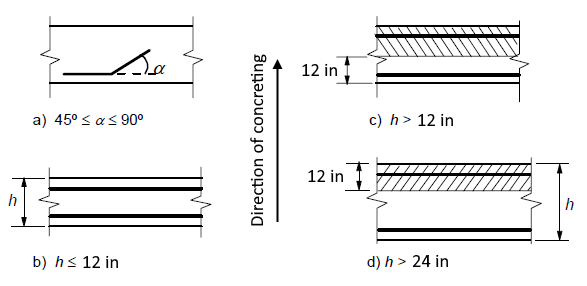
Direcția de betonare poate fi setată în aplicație.
Toți ceilalți factori determinați în 5.11.2.1.2 sunt egali cu 1,0 deoarece este suportat doar betonul de greutate normală și doar armătura neacoperită.
Tensiunea de forfecare de aderență și rezistența la aderență a barelor comprimate se calculează în mod analog cu barele întinse, dar se utilizează ecuațiile din AASHTO LRFD (2014) Articolul 5.11.2.2.
Există, de asemenea, opțiunea de a modela bare netede. Mai multe informații pot fi găsite aici: Bare netede în Detail
Forța totală Ftot și forța limită Flim
Forța totală Ftot este un rezultat al analizei cu elemente finite și poate fi definită în două moduri.
unde Ab este aria barei de armătură și fs este tensiunea din bară.
Sau ca sumă a forței de ancoraj Fa și a forței de aderență Fbond.
unde Fa este forța reală din arcul de ancoraj și Fbond este forța de aderență care poate fi obținută prin integrarea tensiunii de aderență τb pe lungimea barei de armătură l.
Cs este circumferința barei de armătură.
Forța limită Flim este forța maximă în elementul barei de armătură, luând în considerare rezistența barei și, de asemenea, condițiile de ancorare (aderența dintre beton și armătură și cârligele de ancoraj, buclele etc.).
unde Cs este circumferința barei de armătură și l este lungimea de la începutul barei până la punctul de interes.
unde Flim,add este forța suplimentară calculată din mărimea unghiului dintre elementele vecine. Flim,2 trebuie să fie întotdeauna mai mică decât Fu.
Tipurile de ancoraj disponibile în CSFM includ bara dreaptă (adică fără reducerea capătului de ancoraj), cârlig la 90 de grade, cârlig la 180 de grade, aderență perfectă și bară continuă. Toate aceste tipuri, împreună cu coeficienții de ancoraj β corespunzători, sunt prezentate în Fig. 67 pentru armătura longitudinală. Valorile coeficienților de ancoraj adoptați sunt derivate din compararea ecuației din secțiunea AASHTO LRFD (2014) 5.11.2.1 și a ecuațiilor preluate din secțiunea AASHTO LRFD (2014) 5.11.2.4.1. Trebuie remarcat că, în ciuda diferitelor opțiuni disponibile, CSFM distinge trei tipuri de capete de ancoraj: (i) fără reducerea lungimii de ancorare, (ii) o reducere de 30% a lungimii de ancorare în cazul unui ancoraj normalizat și (iii) aderență perfectă.
Coeficientul de ancoraj pentru etrieri (disponibil pentru elementul de tip grindă) este întotdeauna β = 1,0.
Pentru a respecta cerințele AASHTO, arcul de ancoraj trebuie utilizat în calcul. Arcul de ancoraj este modificat prin coeficientul β, astfel încât utilizatorul trebuie să folosească unul dintre tipurile de ancoraj disponibile atunci când definește condițiile de început și de sfârșit ale armăturii.
La proiectarea structurilor din beton, întâlnim două mari grupe de zone parțial încărcate (ZPI) – prima dintre acestea cuprinde reazeme, iar cealaltă constă în zone de ancorare.
Conform standardelor în vigoare pentru proiectarea structurilor din beton armat, strivirea locală a betonului și forțele de întindere transversale trebuie luate în considerare pentru reazeme. Pentru o sarcină uniform distribuită pe o arie, A1, capacitatea de compresiune a betonului poate fi mărită de până la două ori în funcție de aria de distribuție de calcul A2. A se vedea AASHTO LRFD (2024) Articolul 5.6.5.
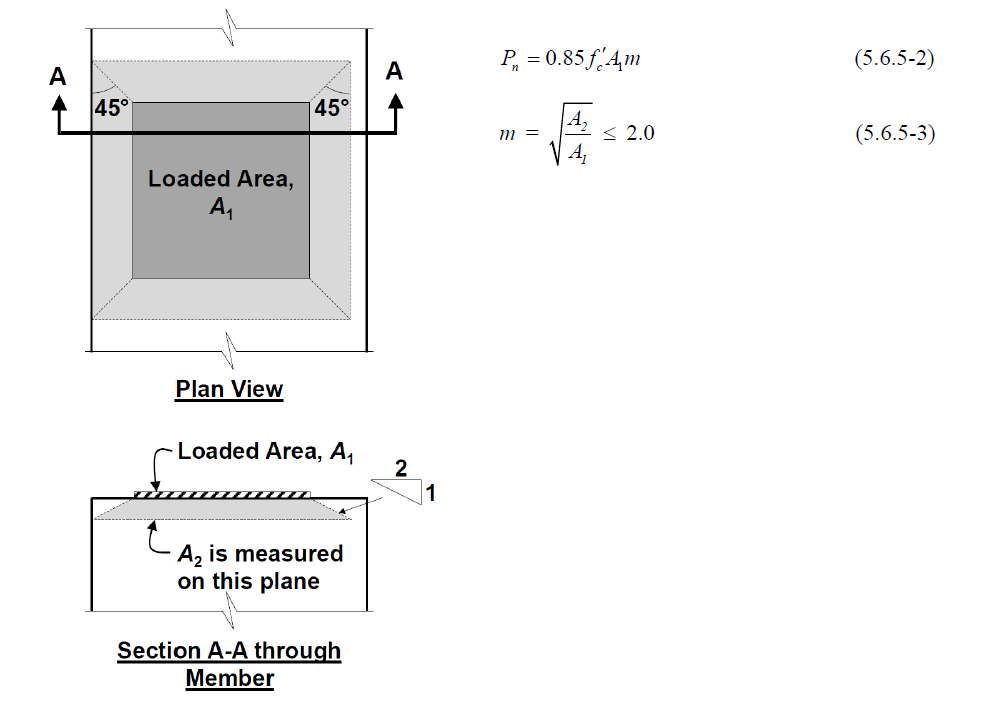
Pentru zonele de ancorare post-tensionate, trebuie respectat AASHTO LRFD (2024) Articolul 5.8.4.4.
Zona parțial încărcată trebuie să fie suficient armată cu armătură transversală proiectată să transmită forțele de despicare care apar în zonă. Fără armătura transversală necesară, nu este posibil să se ia în considerare creșterea capacității de compresiune a betonului.
Zone parțial încărcate în CSFM
Utilizând CSFM, este posibil să se proiecteze și să se evalueze structuri din beton armat incluzând influența creșterii rezistenței la compresiune a betonului în zonele parțial încărcate. Deoarece CSFM este un model de perete (2D), iar zonele parțial încărcate reprezintă o problemă spațială (3D), a fost necesară găsirea unei soluții care să combine aceste două tipuri diferite de probleme (Fig. 69). Dacă funcția „zone parțial încărcate" este activată, geometria conului admisibil este creată conform ACI (Fig. 68). Toate coliziunile geometrice sunt rezolvate complet în 3D pentru geometria elementului de beton specificat și dimensiunile fiecărei ZPI. Ulterior, se creează un model de calcul al zonei parțial încărcate.
Modificarea modelului de material s-a dovedit a fi o abordare nepotrivită, în principal deoarece maparea proprietăților pe plasa de elemente finite este problematică. S-a stabilit că o abordare independentă de plasa de elemente finite reprezintă o soluție mai adecvată. Biele fictive perfect coerente sunt create pentru geometria conului de compresiune cunoscut (Fig. 70 și Fig. 71). Aceste biele au proprietăți de material identice cu betonul utilizat în model, inclusiv diagrama efort-deformație. Forma conului determină direcția bielelor, care distribuie treptat sarcina de pe ZPI la aria de distribuție de calcul. Densitatea de arie a bielelor fictive este variabilă în fiecare parte a conului și adaugă o arie fictivă de beton în direcția sarcinii. La nivelul ariei încărcate (A1), o arie fictivă de beton este adăugată conform raportului (unde Areal este aria rezemului considerată în modelul de calcul 2D), iar această arie scade liniar la zero spre aria de distribuție de calcul (A2). Această soluție asigură că tensiunea de compresiune în beton este constantă pe întregul volum al conului.
Rezistența zonei parțial încărcate este mărită conform raportului dintre aria de distribuție de calcul și aria încărcată, prevăzut în AASHTO LRFD (2024) Articolul 5.6.5. Trebuie reținut că acesta este un model de calcul care nu poate descrie cu precizie starea de tensiune dintr-o zonă parțial încărcată, al cărei flux real este mult mai complicat. Cu toate acestea, această soluție permite distribuirea corectă a sarcinii în întregul model, respectând totodată capacitatea portantă sporită a zonei parțial încărcate. În plus, introduce corect tensiunile transversale în această zonă pentru a proiecta corect armătura la forțele de despicare.
Tensiunea admisibilă de reazem de 0.85fc' este prevăzută în AASHTO LRFD (2024) Articolul 5.8.4.4. Densitatea este limitată astfel încât capacitatea dublă maximă indicată în formula 5.6.5-3 să nu fie depășită.
Pentru zonele de ancorare, ZPI este utilizată în același mod ca pentru reazeme în aplicație. De aceea, tensiunile de compresiune din zonele locale și globale definite în Articolele 5.8.4.4 și 5.8.4.5 trebuie verificate manual. ZPI este, prin urmare, utilizată doar pentru a evita depășirea criteriului de deformație în zona locală și astfel oprirea prematură a calculului. Pe de altă parte, armătura care rezistă la tensiunile de despicare, exfoliere în plan și tensiunile de margine în zonele generale (definite în Articolul 5.8.4.5) poate fi verificată direct și avantajos în aplicație.
Verificările la starea limită de serviciu se efectuează pentru limitarea tensiunilor, lățimea fisurilor și limitele de deformație. Tensiunile sunt verificate în elementele de beton și armătură conform AASHTO LRFD, într-un mod similar celui specificat pentru Starea Limită de Rezistență.
Limitarea tensiunilor
Tensiunea în beton la compresiune este evaluată doar pentru elementele precomprimate (când cazul de încărcare de Precomprimare este prezent în model) ca raport între tensiunea principală maximă de compresiune fc = σc2 obținută din analiza cu elemente finite pentru starea de serviciu și valorile limită, care sunt stabilite pe baza Tabelului 5.9.2.3.2a-1 din AASHTO LRFD.

În aplicație, Precomprimare plus încărcare permanentă este tratată ca încărcare susținută, iar Precomprimare, încărcare permanentă și tranzitorie ca încărcare totală.
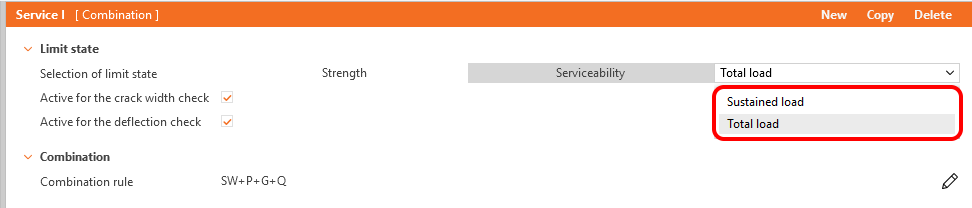
În plus, este întotdeauna posibil să se efectueze o analiză atât pentru efectele pe termen scurt, cât și pentru cele pe termen lung, utilizând modele de material care iau în considerare sau nu factorul de fluaj — consultați secțiunea „Modele de material (AASHTO)".

Deformație
Deformațiile instantanee și deformațiile totale sunt evaluate pentru fiecare combinație în care evaluarea deformației este activată.
- Pentru deformațiile instantanee, se utilizează modulul de elasticitate Ec conform articolului 5.4.2.4 din AASHTO LRFD (2024).
- Pentru deformațiile totale, se utilizează modulul de elasticitate efectiv Ec,eff conform articolului C5.12.5.3.6 din AASHTO LRFD (2024).
Consultați capitolul 'Modele de material (AASHTO) - Beton – Stare de serviciu' din acest document.
Verificarea deformației este activată din bara de instrumente superioară. Utilizatorul stabilește valorile limită ale deformației conform articolului 2.5.2.6.2 din AASHTO LRFD (2024), în funcție de tipul elementului analizat.

Deformațiile la capetele decupate nu pot fi verificate.
Lățimea fisurilor
Lățimile și orientările fisurilor sunt calculate doar pentru efectele pe termen lung (utilizând Ec,eff conform articolului C5.12.5.3.6 din AASHTO LRFD (2024)) pentru combinațiile în care evaluarea lățimii fisurilor este activată. Verificările pe baza valorilor limită specificate de utilizator sunt după cum urmează:
unde:
w lățimea fisurii calculată prin analiza cu elemente finite,
wlim valoarea limită a lățimii fisurii definită de utilizator.
Valoarea limită wlim se determină pe baza tipului de element și a clasei de expunere, în conformitate cu articolul 5.6.7 din AASHTO LRFD (2024) și comentariile aferente.
Există două modalități de calcul al lățimilor fisurilor (fisurare stabilizată și nestabilizată). În cazul general (fisurare stabilizată), lățimea fisurii se calculează prin integrarea deformațiilor pe elementele 1D ale barelor de armătură. Direcția fisurii se calculează apoi din cele mai apropiate trei puncte de integrare (față de centrul elementului finit 1D de armătură) ale elementelor 2D de beton. Deși această abordare pentru calculul direcțiilor fisurilor nu corespunde poziției reale a fisurilor, ea furnizează totuși valori reprezentative care conduc la rezultate ale lățimii fisurilor comparabile cu valorile impuse de cod la poziția barei de armătură.
7 Verificări structurale conform standardului australian AS 3600 (2018)
Evaluarea structurii utilizând CSFM se realizează prin două analize diferite: una pentru starea limită de serviciu și una pentru combinațiile de încărcări la rezistență. Analiza la starea limită de serviciu presupune că comportamentul sub încărcările factorizate este satisfăcător și că condițiile de curgere ale materialului nu vor fi atinse la nivelurile de încărcare de serviciu. Această abordare permite utilizarea unor modele constitutive simplificate (cu o ramură liniară a diagramei efort-deformație a betonului) pentru analiza la starea limită de serviciu, în scopul îmbunătățirii stabilității numerice și a vitezei de calcul.
CSFM este o metodă de analiză structurală care satisface regulile generale din capitolele 6.1.1 și 6.1.2 și este definită ca (f) analiză neliniară a tensiunilor în capitolul 6.1.3 - mai departe în capitolul 6.6.
Analiza prin CSFM ia în considerare toate efectele neliniare și inelastice relevante (cu excepția contracției) definite în 6.6.3.
Pentru a satisface cerințele din secțiunile 6.6.4 și 6.6.5 - mai multe informații pot fi găsite în AS3600:2018 Sup 1:2022 secțiunea C6.6 - verificarea și validarea metodei au fost efectuate la diverse universități. Articolele individuale care rezumă rezultatele verificării și validării pot fi găsite la următorul link.
Deoarece IDEA StatiCa Detail este un program practic de proiectare, rezistența caracteristică factorizată la compresiune pe cilindru la 28 de zile f'c este utilizată pentru calcule, așa cum este descris în capitolul următor.
Beton - Rezistență
Modelul de beton implementat pentru calculele de rezistență în CSFM se bazează pe curba efort-deformație parabolică-plastică. Rezistența la întindere este neglijată, ca și în proiectarea clasică a betonului armat.
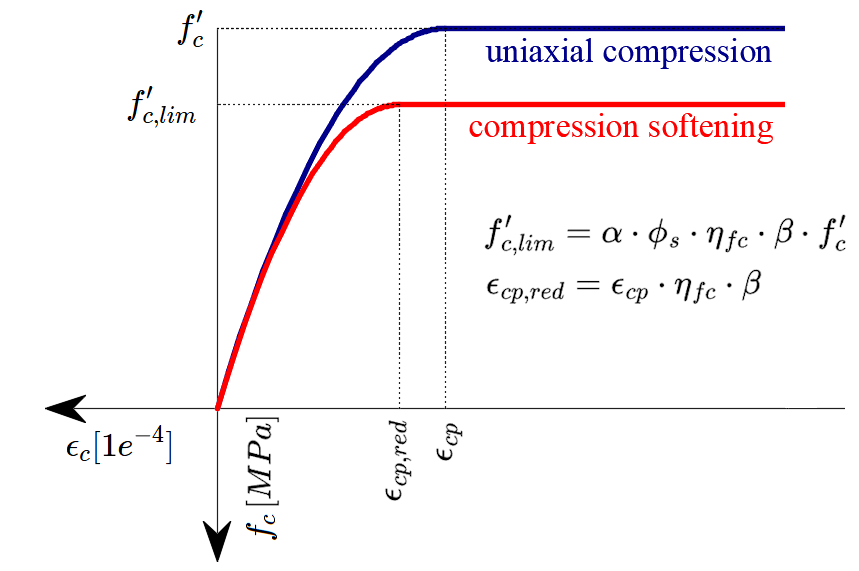
Implementarea CSFM în IDEA StatiCa Detail nu consideră un criteriu explicit de cedare în termeni de deformații pentru betonul comprimat (adică, după atingerea tensiunii de vârf, se consideră o ramură plastică cu εc0 la valoarea maximă de 5%, în timp ce AS 3600 Cl. 8.3.1 presupune o deformație ultimă mai mică de 0,3%). Această simplificare nu permite verificarea capacității de deformare a structurilor care cedează prin compresiune. Cu toate acestea, rezistența este corect estimată atunci când, pe lângă factorul betonului fisurat (kc2 definit în (Fig. 77)), creșterea fragilității betonului odată cu creșterea rezistenței sale este luată în considerare prin intermediul factorului de reducere definit în fib Model Code 2010 după cum urmează:
unde:
α2 este factorul de reducere a rezistenței la compresiune a betonului definit în AS 3600 Cl. 8.3.1
La utilizarea diagramei efort-deformație parabolă-dreptunghi, este necesar să se reducă tensiunea maximă de compresiune cu acest factor. Aceasta mediază distribuția tensiunilor în zona comprimată astfel încât rezistența la compresiune rezultantă să fie mai mică sau egală cu rezistența la compresiune calculată folosind o diagramă efort-deformație cu ramură plastică descrescătoare. O abordare analogă este definită pentru blocul de tensiuni dreptunghiular în Capitolul 8.1.3.
Φs este factorul de reducere a tensiunii pentru beton. Valoarea implicită este stabilită conform AS 3600 Tabelul 2.2.3.
β este factorul de reducere datorat prezenței fisurării transversale (denumit și kc2 în acest text)
f'c este rezistența cilindrică a betonului (în MPa pentru definiția ).
β este un factor de reducere bazat pe aceleași principii ca un factor de rezistență efectivă la compresiune definit în Capitolul 2.2.3. Literatura pe baza căreia este determinat acest factor poate fi găsită (inclusiv în contextul standardului AS3600) în AS3600:2018 Sup 1:2022 CL. C2.2.3.
Beton – Stare limită de serviciu
Analiza la starea limită de serviciu conține anumite simplificări ale modelelor constitutive utilizate pentru analiza de rezistență. Ramura plastică a curbei efort-deformație a betonului comprimat este neglijată, în timp ce ramura elastică este liniară și infinită. Legea rezistenței reduse a betonului comprimat nu este luată în considerare. Aceste simplificări îmbunătățesc stabilitatea numerică și viteza de calcul și nu reduc generalitatea soluției atât timp cât limitele de tensiune ale materialelor la starea limită de serviciu sunt clar sub punctele de curgere (conform cerințelor AS3600). Prin urmare, modelele simplificate utilizate pentru starea limită de serviciu sunt valabile numai dacă toate cerințele de verificare sunt îndeplinite.
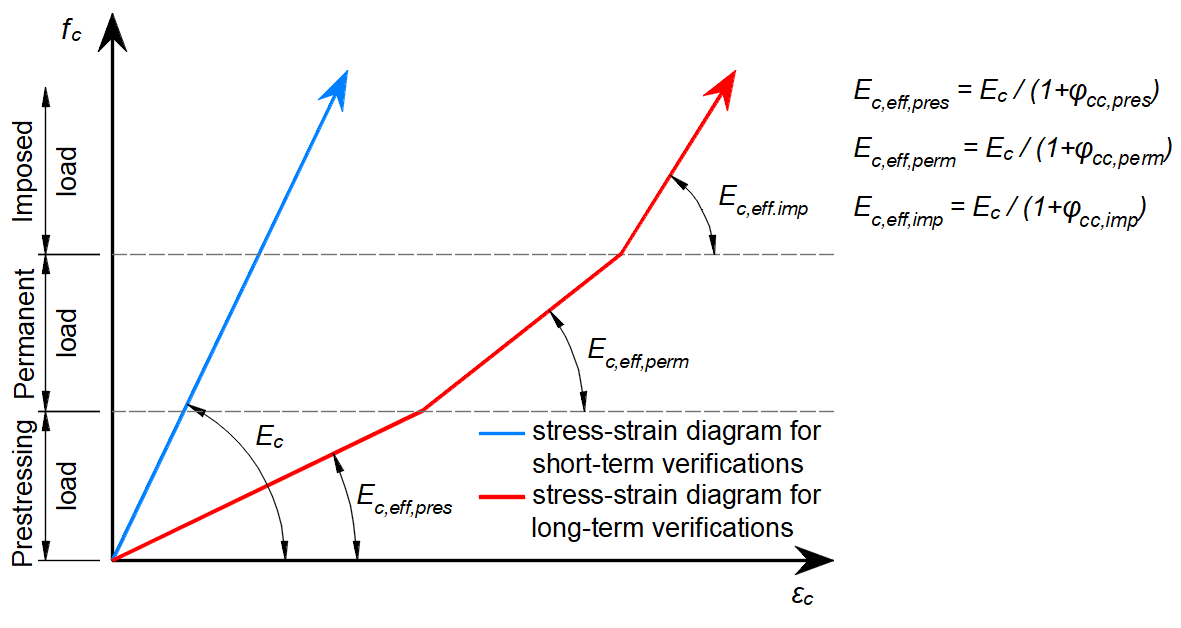
Efecte pe termen lung
În analiza la starea limită de serviciu, efectele pe termen lung ale betonului sunt considerate utilizând coeficientul de fluaj de calcul conform AS 3600 CL 3.1.8 (φcc, luat ca valoare implicită de 2,5), care modifică modulul de elasticitate secant al betonului (Ec) după cum urmează:
Incrementele de încărcare sunt calculate secvențial în ordinea: Pretensionare - Permanentă - Variabilă, utilizând modulul de elasticitate efectiv corespunzător pentru fiecare increment, conform Fig. 78. Factorii de fluaj sunt definiți de utilizator în proprietățile materialului și trebuie calculați conform AS 3600 CL 3.1.8.3
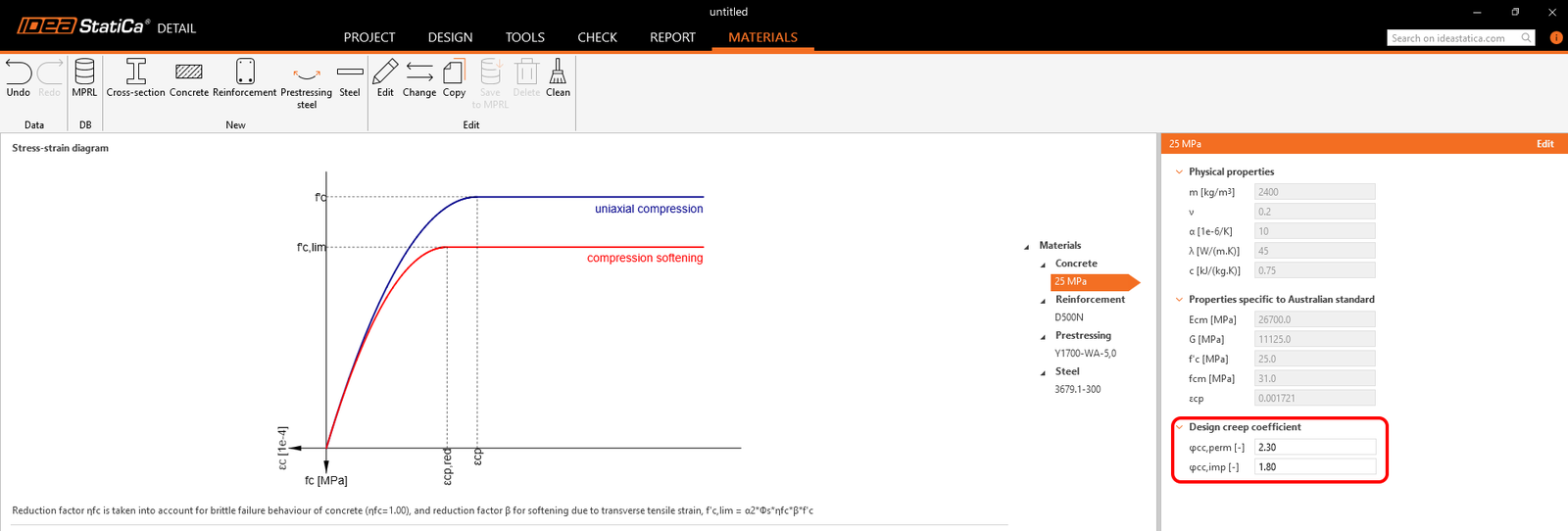
Efecte pe termen scurt
Pentru efectuarea verificărilor pe termen scurt, se realizează un calcul suplimentar în care toate încărcările sunt calculate fără factorul dependent de timp pentru încărcările susținute. Ambele calcule pentru verificările pe termen lung și scurt sunt reprezentate în Fig. 78.
Armătură
Se consideră o diagramă efort-deformație perfect elasto-plastică cu un punct de curgere definit pentru armătura nepretensionată, conform AS 3600 Secțiunea 3.2. Definirea acestei diagrame necesită cunoașterea doar a proprietăților de bază ale armăturii – rezistența și modulul de elasticitate.
Diagrama efort-deformație a armăturii poate fi definită și de utilizator, dar în acest caz este imposibil să se presupună efectul de participarea betonului întins (este imposibil să se calculeze deschiderea fisurilor).
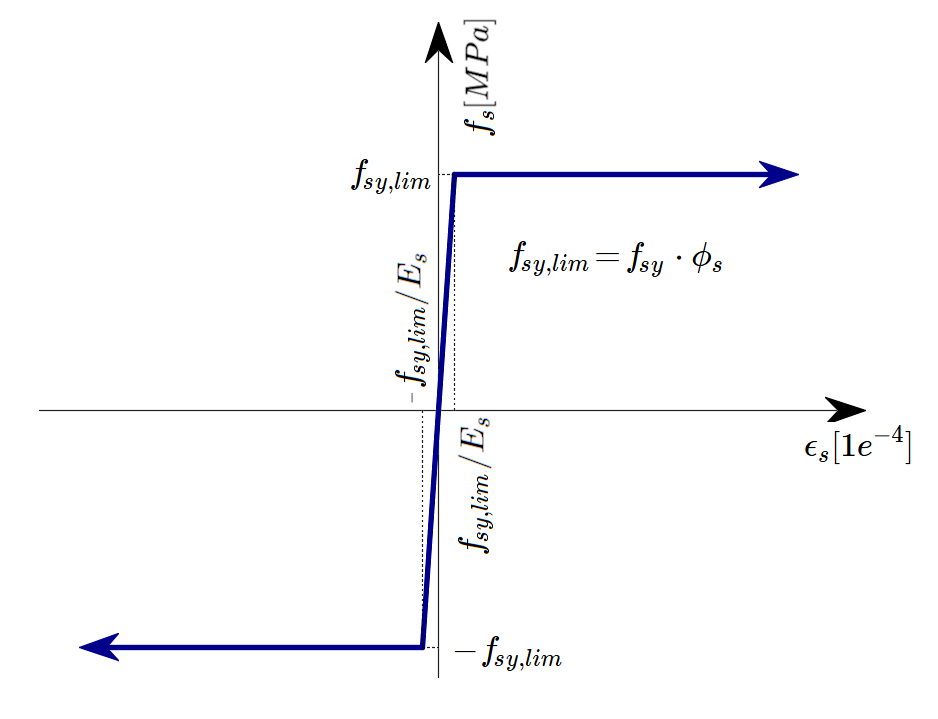
unde:
Φs este factorul de reducere a rezistenței pentru armătură. Valoarea implicită este stabilită conform AS 3600 Tabelul 2.2.3.
fy este limita de curgere a armăturii
Es modulul de elasticitate al armăturii
Participarea betonului întins (Fig. 81) este luată în considerare automat prin modificarea relației efort-deformație de intrare a barei de armătură libere, pentru a surprinde rigiditatea medie a barelor înglobate în beton (εm).
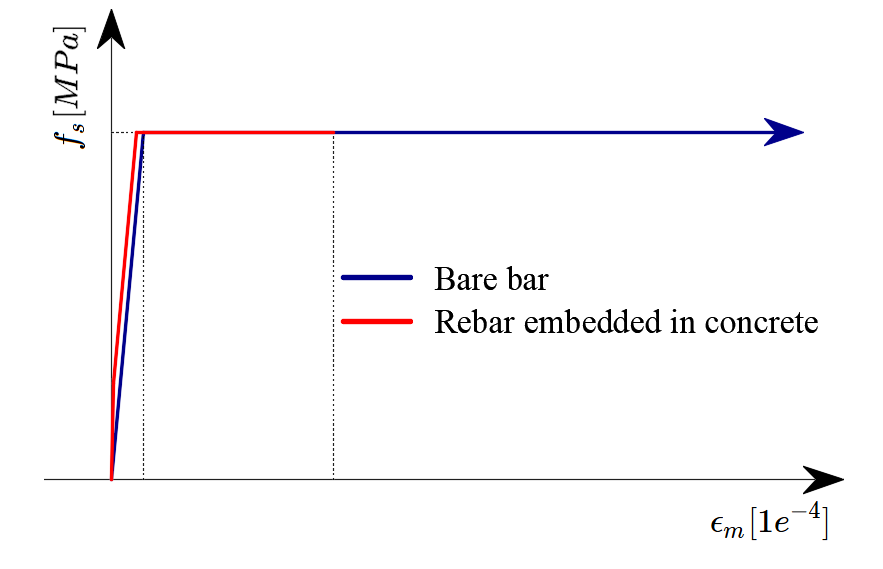
Metoda Câmpului de Tensiuni Compatibil este conformă cu codurile de proiectare moderne. Deoarece modelele de calcul utilizează doar proprietăți standard ale materialelor, formatul factorilor parțiali de siguranță prescris în codurile de proiectare poate fi aplicat fără nicio adaptare. În acest fel, încărcările de intrare sunt factorizate, iar proprietățile caracteristice ale materialelor sunt reduse folosind factorii de reducere a tensiunilor corespunzători, exact ca în analiza convențională a betonului.
Valorile factorilor de reducere a tensiunilor sunt prescrise în AUS 3600 Cl. 2.2.3. Valorile implicite pentru beton și armătură sunt stabilite conform Tabelului 2.2.3
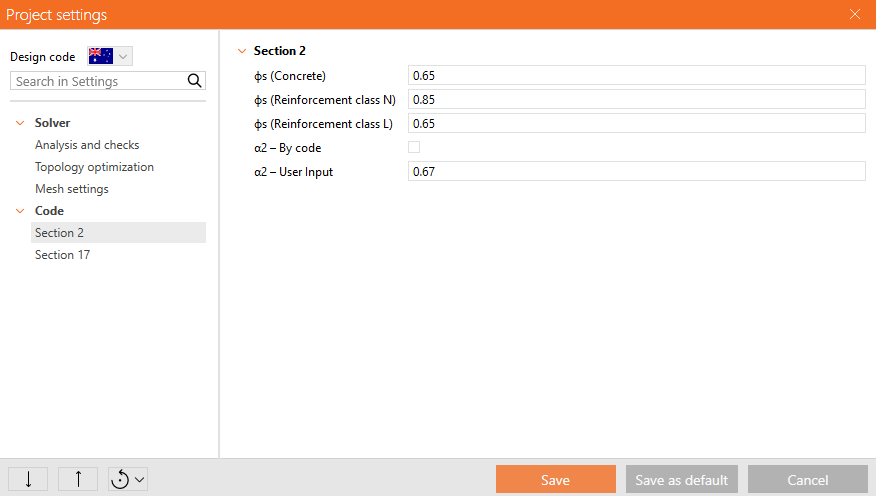
Factorii de încărcare pentru combinațiile de Rezistență trebuie definiți conform AS 3600 Cl. 4.2.2. Factorii de încărcare pentru combinațiile de Serviciu trebuie determinați conform Tabelului 4.1. Pentru toate șabloanele, factorii de încărcare sunt deja predefiniti.
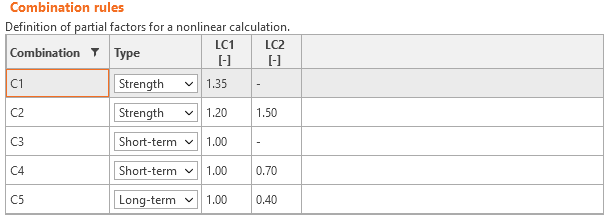
Diferitele verificări impuse de AS 3600 sunt evaluate pe baza rezultatelor directe furnizate de model. Verificările sunt efectuate pentru rezistența betonului, rezistența armăturii și ancoraj (tensiuni de forfecare de aderență).
Rezistența betonului la compresiune este evaluată ca raportul dintre tensiunea principală maximă de compresiune fc (de asemenea σ2 în Rezultate auxiliare) obținută din analiza MEF și valoarea limită f'c,lim.
Rezistența armăturii este evaluată atât la întindere, cât și la compresiune, ca raportul dintre tensiunea din armătură la fisuri fs și valoarea limită specificată fsy,lim.
Tensiunea de forfecare de aderență este evaluată independent ca raportul dintre tensiunea de aderență τb calculată prin analiza MEF și tensiunea de aderență ultimă de calcul fbu.
Pentru determinarea tensiunii de aderență ultimă de calcul fbu, formula C13.1.2.2 definită în AS3600:2018 Sup 1:2022 este utilizată în aplicație.
Unde f'c ≤ 65 MPa (în formulă este în MPa), iar factorii k sunt determinați din AS 3600 Cl. 13.1.2.2 după cum urmează:
k3 = 0.7 (valoare conservatoare pentru toată armătura)
k2 = (132 - db) / 100 (db este diametrul barei în milimetri)
= 1.3 pentru o bară orizontală cu mai mult de 300 mm de beton turnat sub bară, sau 1.0 în caz contrar
k1 este derivat automat din poziția armăturii în model și din direcția de betonare, care poate fi setată în aplicație pentru fiecare element de proiect după cum urmează.
Lungimea de bază de ancorare Lsy,tb este calculată conform formulei 13.1.2.2 din AS 3600 după cum urmează:
După cum se poate observa în formulă, lungimea de bază de ancorare Lsy,tb este limitată inferior, prin urmare tensiunea de aderență ultimă de calcul fbu trebuie limitată în același mod în aplicație, astfel încât se aplică:
Unde fsy este în MPa.
Derivarea limitării fbu este după cum urmează:
Există, de asemenea, o opțiune de modelare a barelor netede. Mai multe informații pot fi găsite aici: Bare netede în Detail
Forța totală Ftot și forța limită Flim
Forța totală Ftot este un rezultat al analizei cu elemente finite și poate fi definită în două moduri.
unde As este aria barei de armătură și fs este tensiunea din bară.
Sau ca sumă a forței de ancoraj Fa și a forței de aderență Fbond.
unde Fa este forța reală din arcul de ancoraj și Fbond este forța de aderență care poate fi obținută prin integrarea tensiunii de aderență τb de-a lungul lungimii barei de armătură l.
Cs este circumferința barei de armătură.
Forța limită Flim este forța maximă în elementul barei de armătură, luând în considerare rezistența barei și, de asemenea, condițiile de ancorare (aderența dintre beton și armătură și cârlige de ancorare, bucle etc.).
unde Cs este circumferința barei de armătură, iar l este lungimea de la începutul barei până la punctul de interes.
unde Flim,add este forța suplimentară calculată din mărimea unghiului dintre elementele vecine. Flim,2 trebuie să fie întotdeauna mai mică decât Fu.
Tipurile de ancoraj disponibile în CSFM includ o bară dreaptă (adică fără reducere la capătul de ancoraj), cârlig standard, cârlig standard, aderență perfectă și bară continuă. Toate aceste tipuri, împreună cu coeficienții de ancoraj β corespunzători, sunt prezentate în Fig. 86 pentru armătura longitudinală. Valorile coeficienților de ancoraj adoptați sunt derivate din AS 3600 Cl. 13.1.2. Trebuie remarcat că CSFM distinge trei tipuri de capete de ancoraj: (i) fără reducere a lungimii de ancoraj, (ii) o reducere de 50% a lungimii de ancoraj în cazul unui ancoraj normalizat și (iii) aderență perfectă.

Coeficientul de ancoraj pentru etrieri este întotdeauna - β = 1.0.
Pentru a respecta AS 3600, arcul de ancoraj trebuie utilizat în calcul; arcul de ancoraj este modificat prin coeficientul β, astfel încât utilizatorul trebuie să folosească unul dintre tipurile de ancoraj disponibile atunci când definește condițiile de început și de sfârșit ale armăturii.
Verificările la starea limită de serviciu sunt efectuate pentru lățimea fisurilor și limitele de deformație.
Deformație
În funcție de tipul de combinație selectat (pe termen lung sau pe termen scurt), se evaluează deformația pe termen lung sau pe termen scurt. Valoarea maximă admisă a deformației va fi determinată de utilizator și va fi considerată în conformitate cu AS 3600 Cl. 2.3.2.

În aplicație, este posibil să se afișeze deformațiile din încărcarea permanentă ΔPL și din încărcarea variabilă ΔIL separat, precum și deformația totală ΔTot (permanentă + variabilă), toate acestea putând fi afișate împreună cu forma deformată.
Deformațiile la capetele tăiate nu pot fi verificate.
Lățimea fisurilor
Lățimile fisurilor și orientările acestora sunt calculate pentru combinații de serviciu pe termen scurt sau pe termen lung. Metoda de calcul direct al lățimilor fisurilor în aplicație este în conformitate cu (bazată pe) metoda prezentată în AS 3600 8.6.2.3.
Verificările sunt prezentate după cum urmează:
unde:
w lățimea fisurii pe termen scurt sau lung calculată prin analiza cu Metoda Elementelor Finite,
wlim valoarea limită a lățimii fisurii definită de utilizator.
Lățimile maxime recomandate ale fisurilor pot fi găsite în AS3600:2018 Sup 1:2022 Tabelul C2.3.3.1.
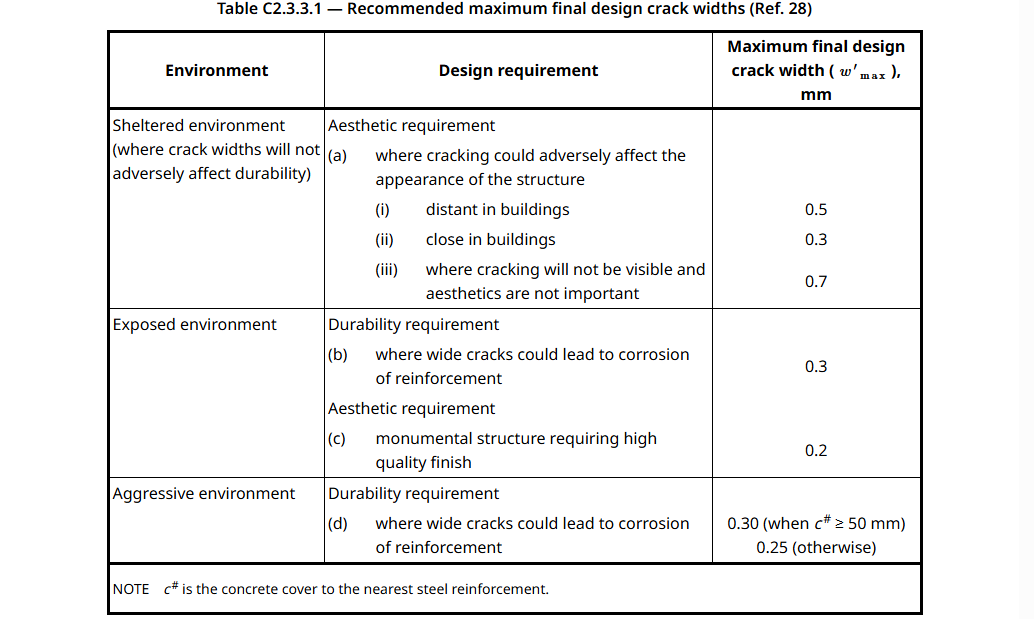
Alternativ, conform AS3600:2018 Sup 1:2022 Cl. C8.6.1 - Pentru structurile supuse încărcărilor de serviciu pe termen lung, valorile recomandate pentru wlim sunt următoarele:
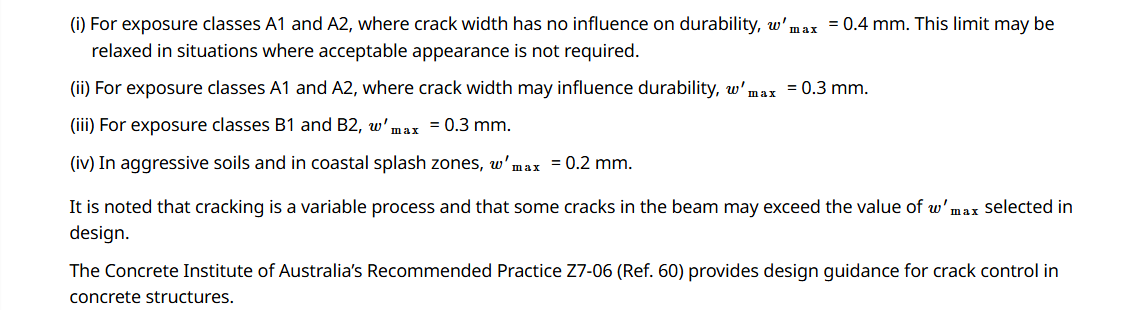
Există două modalități de calcul al lățimilor fisurilor (fisurare stabilizată și nonstabilizată). În cazul general (fisurare stabilizată), lățimea fisurii este calculată prin integrarea deformațiilor pe elementele 1D ale barelor de armătură. Direcția fisurii este apoi calculată din cele mai apropiate trei puncte de integrare (față de centrul elementului finit 1D de armătură dat) ale elementelor 2D de beton. Deși această abordare pentru calculul direcțiilor fisurilor nu corespunde poziției reale a fisurilor, ea furnizează totuși valori reprezentative care conduc la rezultate ale lățimii fisurilor ce pot fi comparate cu valorile lățimii fisurilor impuse de cod la poziția barei de armătură.
8 Pretensionare - descrierea modelului
Metoda Câmpului de Tensiuni Compatibil (CSFM) este o metodă de calcul bazată pe tensiuni plane 2D, în care betonul este modelat cu elemente finite 2D la care sunt conectate elemente de armătură 1D prin constrângeri. În model pot fi adăugate și tipuri speciale de elemente 1D reprezentând armătura pretensionată aderentă, care poate fi modelată ca pre-tensionată și post-tensionată.
Armătura pretensionată este modelată similar armăturii convenționale, utilizând elemente liniare care transmit forța axială. Fiecare element individual de armătură pretensionată este caracterizat prin aria sa și proprietățile materialului. Aceste proprietăți sunt date de curba caracteristică a materialului conform codului utilizat (EN 1992-1-1, ACI 318-19 etc.)
EUROCODE
Diagrama efort-deformație a armăturii pretensionate: a) Diagrama efort-deformație conform EN 1992-1-1; b) deformația inițială pentru armătura pre-tensionată
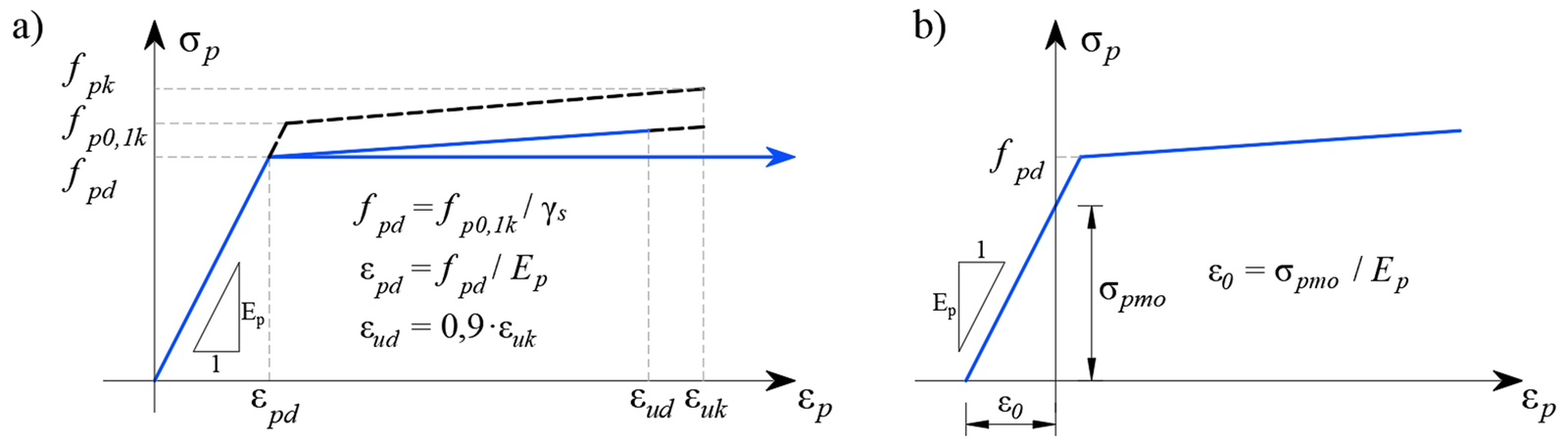
ACI
Diagrama efort-deformație a armăturii pretensionate: a) Diagrama efort-deformație; b) deformația inițială pentru armătura pre-tensionată
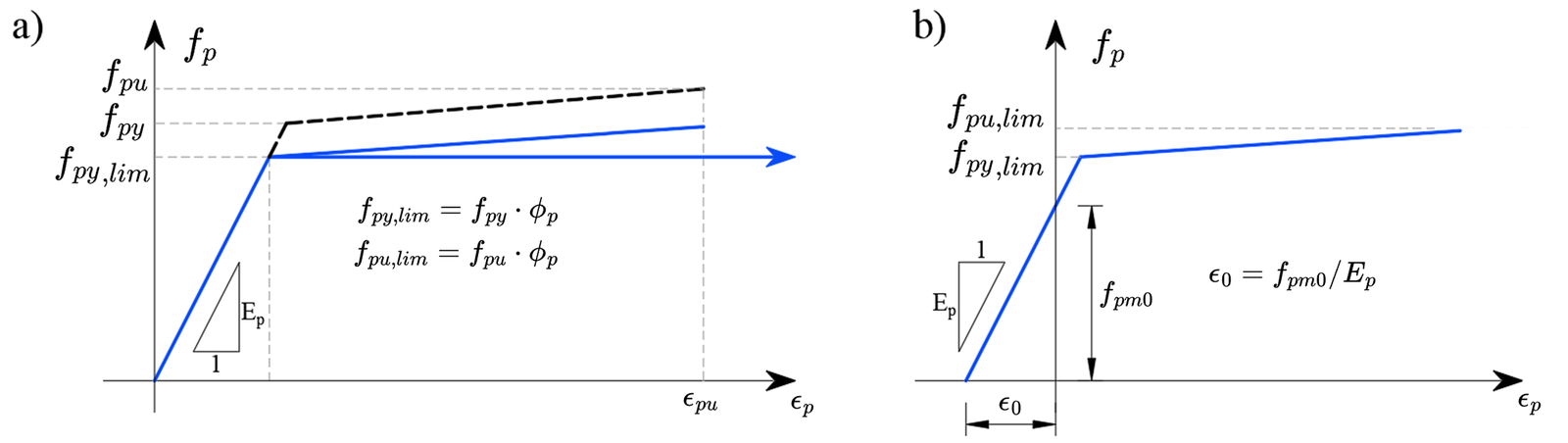
Elementele de armătură sunt conectate printr-un model de aderență la elementele 2D ale modelului de beton, în același mod ca armătura clasică din beton.
- Citiți Tipuri de elemente finite
Elementele modelului de aderență permit deformarea relativă a armăturii pretensionate și a betonului cu caracteristici neliniare corespunzătoare. Aceasta modelează corect coeziunea armăturii cu betonul și, de asemenea, modelul de ancoraj al armăturii pre-tensionate. Modificările de capăt ale armăturii post-tensionate, de exemplu placa de ancoraj, sunt modelate printr-un element cu o rigiditate corespunzătoare ancorului de la capătul armăturii pretensionate, iar forța de pretensionare de la capăt este aplicată ca o încărcare de suprafață în modelul de beton pe o arie egală cu dimensiunea plăcii de ancorare. Modelul nu poate descrie corect starea de tensiune triaxială locală din zona sub-ancoraj, iar această zonă trebuie considerată separat.
Participarea betonului întins datorată interacțiunii cu betonul nu este considerată pentru armătura pretensionată, deoarece se presupune că betonul din vecinătatea armăturii pretensionate se află în compresiune.
Armătură pre-tensionată
Armătura pre-tensionată este pretensionată înainte de turnarea elementului; armătura pretensionată este aproape întotdeauna trasată în linie dreaptă, prin urmare nu apar pierderi de pretensionare prin frecare. Odată ce rezistența necesară a betonului este atinsă, armătura este eliberată de pe blocurile de ancorare, activând astfel armătura pretensionată și transferând forțele din armătură în beton. Acest efect este echivalent fizic cu răcirea armăturii și este modelat printr-o deformație inițială similară celei din încărcarea termică. Aceasta conduce la o diagramă efort-deformație a armăturii pretensionate, așa cum este prezentată în figura de mai sus la b). Modelul de calcul determină automat răspunsul la deformație al structurii la pretensionarea aplicată și, prin urmare, determină direct pierderile de pretensionare prin deformația elastică a elementului.
Deoarece forța de pretensionare este cunoscută și, prin urmare, și tensiunea de pretensionare σpmo, diagrama de material a armăturii este utilizată pentru dependența tensiunii de deformație și poate fi scrisă ca:
Presupunând că pretensionarea în armătură este mai mică decât limita de curgere (adică condițiile definite în EN 1992-1-1, capitolul 5.10.3 sunt îndeplinite), deformația inițială poate fi calculată și ca:
ε0 - deformație inițială din pretensionare
σpm0 - tensiune imediat înainte de eliberare
Ep - modulul de elasticitate al armăturii pretensionate
Armătura pre-tensionată este specifică prin faptul că ancorarea capetelor sale se realizează prin mai multe mecanisme diferite - adeziunea armăturii și betonului la nivel molecular, frecarea generată la interfața dintre suprafața armăturii și beton, împingerea mecanică a armăturii spiralate în beton și creșterea diametrului armăturii pretensionate, cunoscută sub denumirea de mecanism de pană sau efectul Hoyer. Efectele menționate sunt incluse în modelul de calcul CSFM prin modificarea proprietăților modelului de ancoraj în zona de capăt a armăturii pre-tensionate.
Interacțiunea armăturii pre-tensionate cu betonul: a) armătura spiralată împingând în beton; b) efectul Hoyer
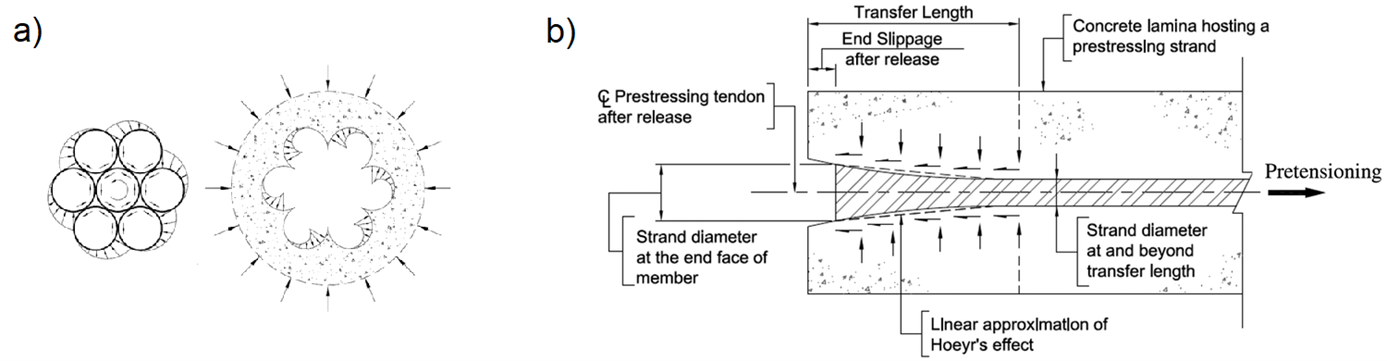
Armătură post-tensionată
Armătura post-tensionată este pretensionată după turnarea structurii. Dispozitivul de pretensionare este rezemat direct în structură, eliminând astfel pierderile datorate deformației elastice a structurii din pretensionare. Odată ce forța de pretensionare dorită este atinsă, armătura este ancorată, iar apoi tecile cablurilor sunt injectate cu lapte de ciment, realizând astfel aderența armăturii cu structura. La modelarea armăturii post-tensionate, calculul este împărțit în mai mulți pași de încărcare - pretensionare, aplicarea altor încărcări permanente și aplicarea încărcărilor variabile.
Plasa de elemente finite din beton cu elemente de armătură pretensionată 1D atașate:
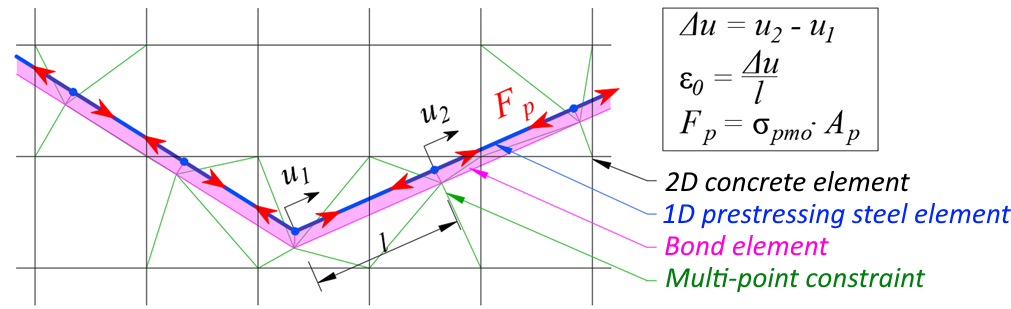
Pasul de încărcare „pretensionare"
La pretensionarea armăturii, rigiditatea armăturii nu este incorporată în rigiditatea structurii. În acest pas de încărcare, rigiditatea elementului liniar nu este considerată în model; elementele de armătură sunt înlocuite de o încărcare substitut corespunzătoare tensiunii de pretensionare și ariei armăturii, așa cum este prezentat în figura de mai sus. După atingerea încărcării complete din pretensionare și convergența acestui pas de încărcare, se citește deformația elementului liniar specific; pe baza deformației se determină deformația inițială ε0 a elementelor liniare individuale ale armăturii pretensionate.
Tensiunea de pretensionare poate fi definită manual de-a lungul lungimii armăturii sau calculată automat pe baza geometriei armăturii. Dacă se alege calculul automat al pierderilor, se iau în considerare pierderile prin frecare (conform EN 1992-1-1, 5.10.5.2, sau ACI 318-19, 20.3.2) și alunecarea armăturii (presarea penelor de ancorare) în timpul ancorării. Deoarece toată armătura pretensionată este aplicată într-un singur pas, pierderile prin pretensionare succesivă nu sunt considerate.
Pașii de încărcare ulteriori cu armătura pretensionată activată
În pașii de încărcare următori (aplicarea altor încărcări permanente și variabile) se urmează aceeași procedură ca pentru armătura pre-tensionată. Se consideră rigiditatea completă a armăturii pretensionate, se consideră aderența dintre armătură și betonul înconjurător, iar diagrama efort-deformație a armăturii pretensionate este modificată prin deformația inițială ε0. Această deformație este diferită pentru fiecare element și a fost obținută din pasul de încărcare anterior „pretensionare". Datorită aderențelor armăturii cu betonul, variația pretensionării datorată deformației elastice a structurii sub încărcarea externă este corect considerată în model.
Referințe
ACI Committee 318. 2019. Building Code Requirements for Structural Concrete (ACI 318-19) and Commentary. Farmington Hills, MI: American Concrete Institute.
Alvarez, Manuel. 1998. Einfluss des Verbundverhaltens auf das Verformungsvermögen von Stahlbeton. IBK Bericht 236. Basel: Institut für Baustatik und Konstruktion, ETH Zurich, Birkhäuser Verlag.
Beeby, A. W. 1979. "The Prediction of Crack Widths in Hardened Concrete." The Structural Engineer 57A (1): 9–17.
Broms, Bengt B. 1965. "Crack Width and Crack Spacing In Reinforced Concrete Members." ACI Journal Proceedings 62 (10): 1237–56. https://doi.org/10.14359/7742.
Burns, C.. 2012. "Serviceability Analysis of Reinforced Concrete Members Based on the Tension Chord Model." IBK Report Nr. 342, Zurich, Switzerland: ETH Zurich.
Crisfield, M. A. 1997. Non-Linear Finite Element Analysis of Solids and Structures. Wiley.
European Committee for Standardization (CEN). 2015. 1 Eurocode 2: Design of concrete structures - Part 1-1: General rules and rules for buildings. Brussels: CEN, 2005.
Fernández Ruiz, M., and A. Muttoni. 2007. "On Development of Suitable Stress Fields for Structural Concrete." ACI Structural Journal 104 (4): 495–502.
Kaufmann, W., J. Mata-Falcón, M. Weber, T. Galkovski, D. Thong Tran, J. Kabelac, M. Konecny, J. Navratil, M. Cihal, and P. Komarkova. 2020. "Compatible Stress Field Design Of Structural Concrete. Berlin, Germany."AZ Druck und Datentechnik GmbH, ISBN 978-3-906916-95-8.
Kaufmann, W., and P. Marti. 1998. "Structural Concrete: Cracked Membrane Model." Journal of Structural Engineering 124 (12): 1467–75. https://doi.org/10.1061/(ASCE)0733-9445(1998)124:12(1467).
Kaufmann, W.. 1998. "Strength and Deformations of Structural Concrete Subjected to In-Plane Shear and Normal Forces." Doctoral dissertation, Basel: Institut für Baustatik und Konstruktion, ETH Zürich. https://doi.org/10.1007/978-3-0348-7612-4.
Konečný, M., J. Kabeláč, and J. Navrátil. 2017. Use of Topology Optimization in Concrete Reinforcement Design. 24. Czech Concrete Days (2017). ČBS ČSSI. https://resources.ideastatica.com/Content/06_Detail/Verification/Articles/Topology_optimization_US.pdf.
Marti, P. 1985. "Truss Models in Detailing." Concrete International 7 (12): 66–73.
Marti, P. 2013. Theory of Structures: Fundamentals, Framed Structures, Plates and Shells. First edition. Berlin, Germany: Wiley Ernst & Sohn.
http://sfx.ethz.ch/sfx_locater?sid=ALEPH:EBI01&genre=book&isbn=9783433029916.
Marti, P., M.Alvarez, W. Kaufmann, and V. Sigrist. 1998. "Tension Chord Model for Structural Concrete." Structural Engineering International 8 (4): 287–298.
https://doi.org/10.2749/101686698780488875.
Mata-Falcón, J. 2015. "Serviceability and Ultimate Behaviour of Dapped-End Beams (In Spanish: Estudio Del Comportamiento En Servicio y Rotura de Los Apoyos a Media Madera)." PhD thesis, Valencia: Universitat Politècnica de València.
Meier, H. 1983. "Berücksichtigung Des Wirklichkeitsnahen Werkstoffverhaltens Beim Standsicherheitsnachweis Turmartiger Stahlbetonbauwerke." Institut für Massivbau, Universität Stuttgart.
Navrátil, J., P. Ševčík, L. Michalčík, P. Foltyn, and J. Kabeláč. 2017. A Solution for Walls and Details of Concrete Structures. 24. Czech Concrete Days.
Schlaich, J., K. Schäfer, and M. Jennewein. 1987a. "Toward a Consistent Design of Structural Concrete." PCI Journal 32 (3): 74–150.
Standards Australia. 2018. Concrete Structures (AS 3600:2018). Sydney, NSW: Standards Australia.
Standards Australia. 2022. Concrete Structures – Commentary (Supplement 1 to AS 3600:2018). Sydney, NSW: Standards Australia.
Vecchio, F.J., and M.P. Collins. 1986. "The Modified Compression Field Theory for Reinforced Concrete Elements Subjected to Shear." ACI Journal 83 (2): 219–31.