IDEA StatiCa Detail – Progettazione strutturale delle discontinuità in calcestruzzo
Il background teorico è basato su COMPATIBLE STRESS FIELD DESIGN OF STRUCTURAL CONCRETE
(Kaufmann et al., 2020)
Progettazione strutturale delle discontinuità in calcestruzzo in IDEA StatiCa Detail
1 Introduzione al metodo CSFM
1.1 Introduzione generale alla progettazione strutturale dei dettagli in calcestruzzo
1.2 Ipotesi principali e limitazioni
1.3 Strumenti di progettazione per l'armatura
2 Modello di analisi di IDEA StatiCa Detail
2.1 Introduzione all'implementazione agli elementi finiti
2.2 Vincoli e componenti di trasmissione del carico
2.3 Trasferimento del carico alle estremità ribassate delle travi
2.4 Modifica geometrica delle sezioni trasversali
2.5 Tipi di elementi finiti
2.6 Discretizzazione della rete
2.7 Metodo di soluzione e algoritmo di controllo del carico
2.8 Presentazione dei risultati
3 Verifica del modello
3.1 Stati limite, calcolo dell'ampiezza delle fessure e irrigidimento a trazione
4 Verifiche strutturali secondo EUROCODE
4.1 Modelli dei materiali (EN)
4.2 Coefficienti di sicurezza
4.3 Analisi allo stato limite ultimo
4.4 Aree parzialmente caricate (PLA)
4.5 Analisi allo stato limite di esercizio
5 Verifiche strutturali secondo ACI 318-19
5.1 Modelli dei materiali (ACI)
5.2 Fattori di riduzione della resistenza e fattori di carico
5.3 Verifiche di resistenza
5.4 Zone di appoggio e di ancoraggio - Aree parzialmente caricate
5.5 Verifiche di esercizio
6 Verifiche strutturali secondo AASHTO
6.1 Modelli dei materiali (AASHTO)
6.2 Fattori di resistenza e di carico
6.3 Stato limite di resistenza
6.4 Resistenza delle zone di appoggio e di ancoraggio – Aree parzialmente caricate
6.5 Stato limite di esercizio
7 Verifiche strutturali secondo AS 3600
7.1 Modelli dei materiali (AUS)
7.2 Fattori di riduzione delle tensioni e fattori di carico
7.3 Verifiche di resistenza e di ancoraggio
7.4 Verifiche di esercizio
8 Precompressione in Detail - Descrizione del modello
1 Introduzione al metodo CSFM
1.1 Introduzione generale alla progettazione strutturale dei dettagli in calcestruzzo
La progettazione e la verifica degli elementi in calcestruzzo vengono normalmente eseguite a livello sezionale (elemento 1D) o puntuale (elemento 2D). Questa procedura è descritta in tutte le normative per la progettazione strutturale, ad esempio in (EN 1992-1-1 o ACI 318-19), ed è utilizzata nella pratica quotidiana dell'ingegneria strutturale. Tuttavia, non sempre è noto o rispettato il fatto che la procedura è accettabile solo nelle zone in cui si applica l'ipotesi di Bernoulli-Navier sulla distribuzione piana delle deformazioni (denominate regioni B). Le zone in cui questa ipotesi non si applica sono chiamate regioni di discontinuità o perturbate (regioni D). Esempi di regioni B e D per elementi 1D sono riportati in (Fig. 1). Si tratta, ad esempio, di zone di appoggio, parti in cui vengono applicati carichi concentrati, posizioni in cui si verifica una variazione brusca della sezione trasversale, aperture, ecc. Nella progettazione di strutture in calcestruzzo si incontrano molte altre regioni D, come pareti, diaframmi di ponti, mensole corte, ecc.
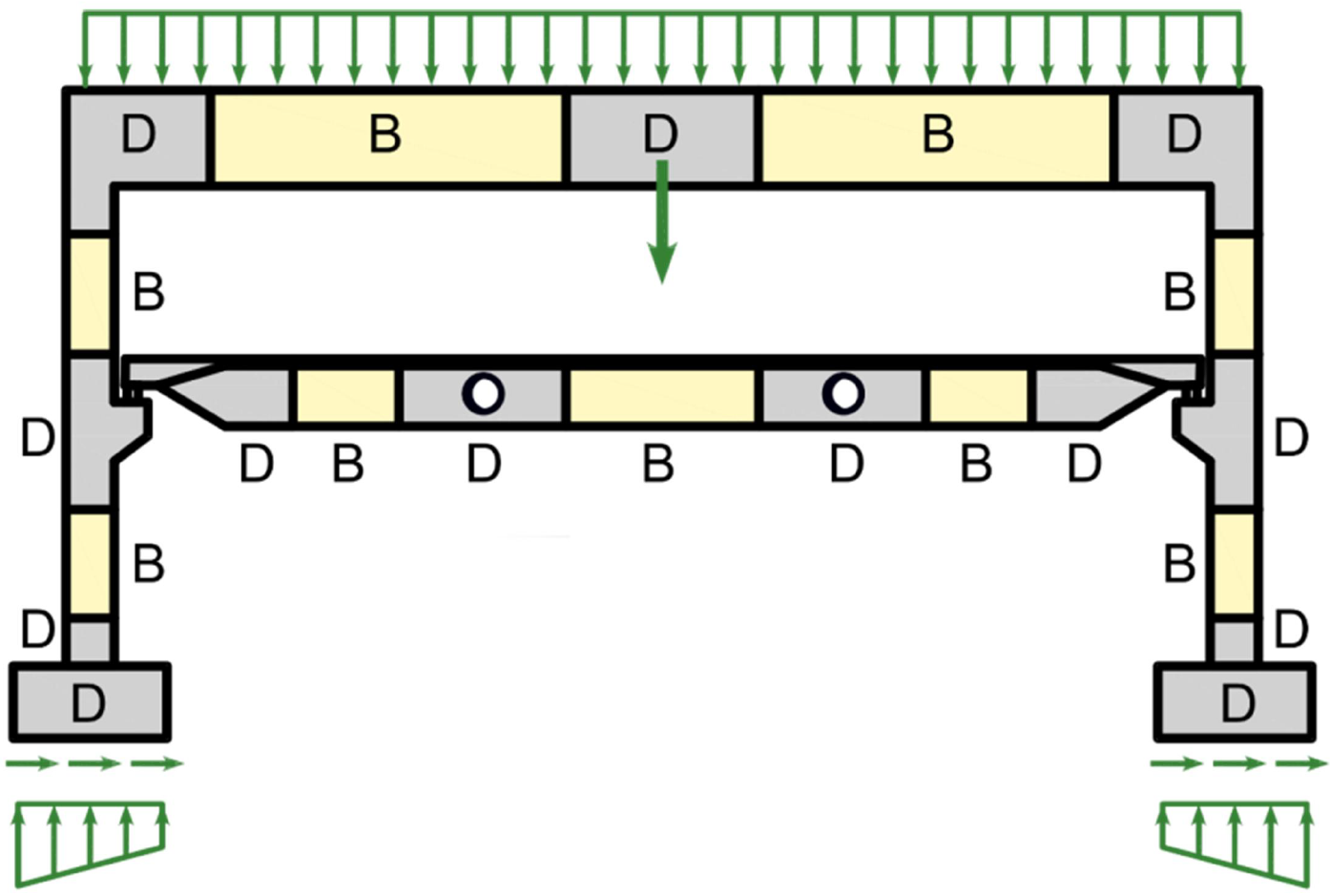
\[ \textsf{\textit{\footnotesize{Fig. 1\qquad Discontinuity regions (Navrátil et al. 2017)}}}\]
In passato, per il dimensionamento delle regioni di discontinuità venivano utilizzate regole di progettazione semi-empiriche. Fortunatamente, nel corso degli ultimi decenni queste regole sono state in gran parte sostituite dai modelli puntone-e-tirante (Schlaich et al., 1987) e dai campi di tensioni (Marti 1985), che sono presenti nelle normative di progettazione attuali e ampiamente utilizzati dai progettisti oggi. Questi modelli sono strumenti meccanicamente coerenti e potenti. Si noti che i campi di tensioni possono essere in generale continui o discontinui e che i modelli puntone-e-tirante rappresentano un caso particolare di campi di tensioni discontinui.
Nonostante l'evoluzione degli strumenti di calcolo negli ultimi decenni, i modelli Puntone-e-Tirante vengono ancora essenzialmente utilizzati come calcoli manuali. La loro applicazione a strutture reali è laboriosa e dispendiosa in termini di tempo, poiché sono necessarie iterazioni e occorre considerare più combinazioni di carico. Inoltre, questo metodo non è adatto alla verifica dei criteri di stato limite di esercizio (deformazioni, ampiezza delle fessure, ecc.).
L'interesse degli ingegneri strutturali per uno strumento affidabile e rapido per la progettazione delle regioni D ha portato alla decisione di sviluppare il nuovo Metodo del Campo di Tensioni Compatibile, un metodo per la progettazione assistita da computer dei campi di tensioni che consente la progettazione e la verifica automatica di elementi in calcestruzzo strutturale soggetti a carichi nel piano.
Il Metodo del Campo di Tensioni Compatibile (CSFM) è un metodo di analisi continua dei campi di tensioni basato sugli elementi finiti, in cui le soluzioni classiche dei campi di tensioni sono integrate con considerazioni cinematiche, ovvero lo stato di deformazione viene valutato in tutta la struttura. Pertanto, la resistenza a compressione efficace del calcestruzzo può essere calcolata automaticamente in base allo stato di deformazione trasversale, in modo analogo alle analisi dei campi di compressione che tengono conto dell'ammorbidimento a compressione (Vecchio e Collins 1986; Kaufmann e Marti 1998) e al metodo EPSF (Fernández Ruiz e Muttoni 2007). Inoltre, il CSFM considera l'irrigidimento a trazione, fornendo rigidezze realistiche agli elementi, e copre tutte le prescrizioni normative (inclusi gli aspetti di esercizio e di capacità deformativa) non affrontate in modo coerente dagli approcci precedenti. Il CSFM utilizza le comuni leggi costitutive uniassiali fornite dalle normative di progettazione per il calcestruzzo e l'armatura. Queste sono note nella fase di progettazione, il che consente l'utilizzo del metodo dei coefficienti parziali di sicurezza. Pertanto, i progettisti non devono fornire proprietà dei materiali aggiuntive, spesso arbitrarie, come quelle tipicamente richieste per le analisi FE non lineari, rendendo il metodo perfettamente adatto alla pratica ingegneristica.
Per favorire l'uso dei campi di tensioni assistiti da computer da parte degli ingegneri strutturali, questi metodi dovrebbero essere implementati in ambienti software di facile utilizzo. A tal fine, il CSFM è stato implementato in IDEA StatiCa Detail; un nuovo software commerciale di facile utilizzo sviluppato congiuntamente dall'ETH di Zurigo e dalla società software IDEA StatiCa nell'ambito del progetto DR-Design Eurostars-10571.
1.2 Principali ipotesi e limitazioni del CSFM in 2D
Il CSFM considera la tensione principale massima del calcestruzzo in compressione (σc2r) e le tensioni nell'armatura (σsr) alle fessure, trascurando la resistenza a trazione del calcestruzzo (σc1r = 0), ad eccezione del suo effetto di irrigidimento sull'armatura. La considerazione dell'irrigidimento a trazione consente di simulare le deformazioni medie dell'armatura (εm). Si considerano fessure fittizie, rotanti, prive di tensione, che si aprono senza scorrimento (Fig. 2a); viene preso in conto anche l'equilibrio alle fessure insieme alle deformazioni medie dell'armatura.
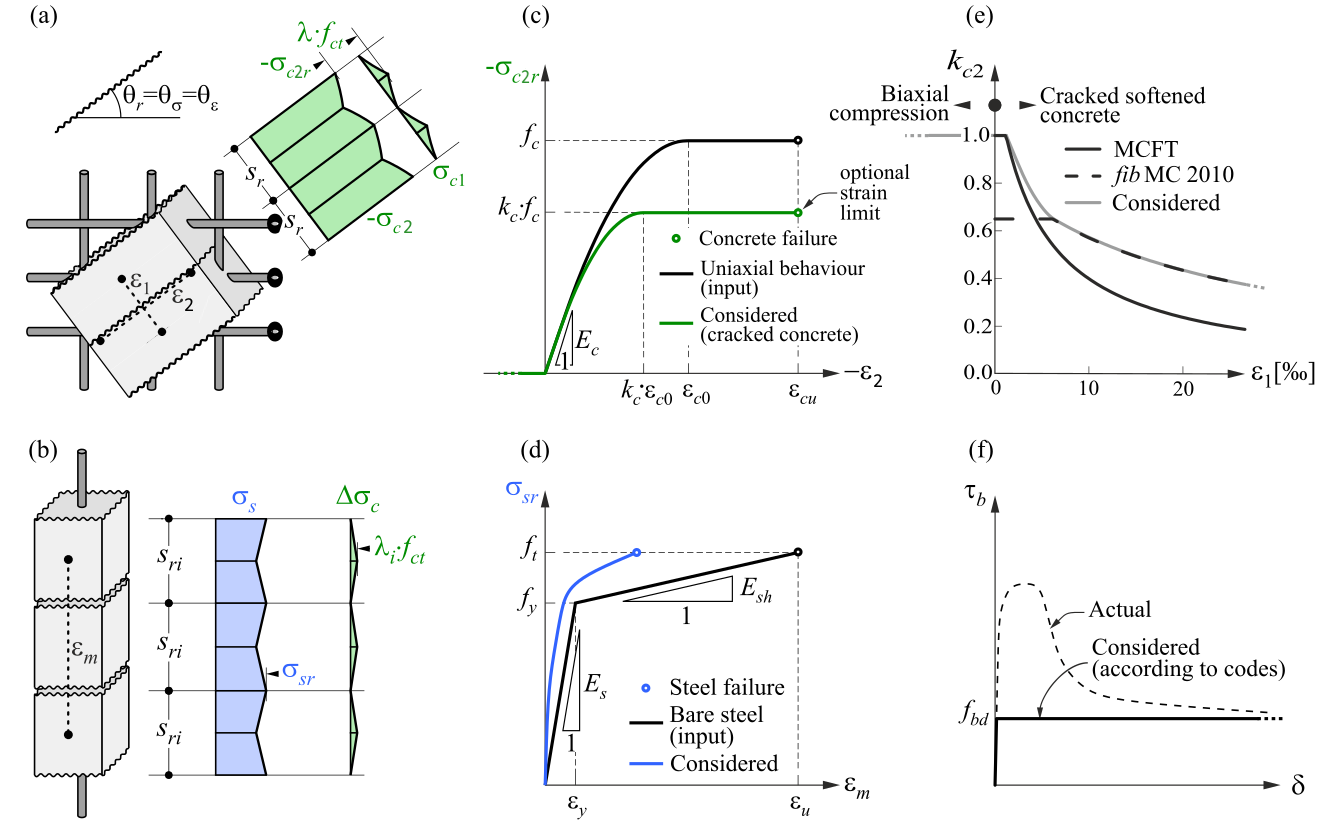
\( \textsf{\textit{\footnotesize{Fig. 2\qquad Basic assumptions of the CSFM: (a) principal stresses in concrete; (b) stresses in the reinforcement direction;}}}\) \( \textsf{\textit{\footnotesize{(c) stress-strain diagram of concrete in terms of maximum stresses with consideration of compression softening;}}}\) \( \textsf{\textit{\footnotesize{(d) stress-strain diagram of reinforcement in terms of stresses at cracks and average strains; (e) compression softening}}}\) \( \textsf{\textit{\footnotesize{law; (f) bond shear stress-slip relationship for anchorage length verifications.}}}\)
Nonostante la loro semplicità, ipotesi analoghe hanno dimostrato di fornire previsioni accurate per elementi armati soggetti a carichi nel piano (Kaufmann 1998; Kaufmann e Marti 1998), a condizione che l'armatura prevista eviti rotture fragili alla fessurazione. Inoltre, la mancata considerazione di qualsiasi contributo della resistenza a trazione del calcestruzzo al carico ultimo è coerente con i principi dei moderni codici di progettazione, che si basano prevalentemente sulla teoria della plasticità.
Tuttavia, il CSFM non è adatto per elementi snelli privi di armatura trasversale, poiché i meccanismi rilevanti per tali elementi — come l'ingranamento degli aggregati, le tensioni residue di trazione all'apice della fessura e l'effetto spinotto — tutti dipendenti direttamente o indirettamente dalla resistenza a trazione del calcestruzzo — vengono trascurati. Sebbene alcune normative di progettazione consentano la progettazione di tali elementi sulla base di disposizioni semi-empiriche, il CSFM non è destinato a questo tipo di strutture potenzialmente fragili.
Calcestruzzo
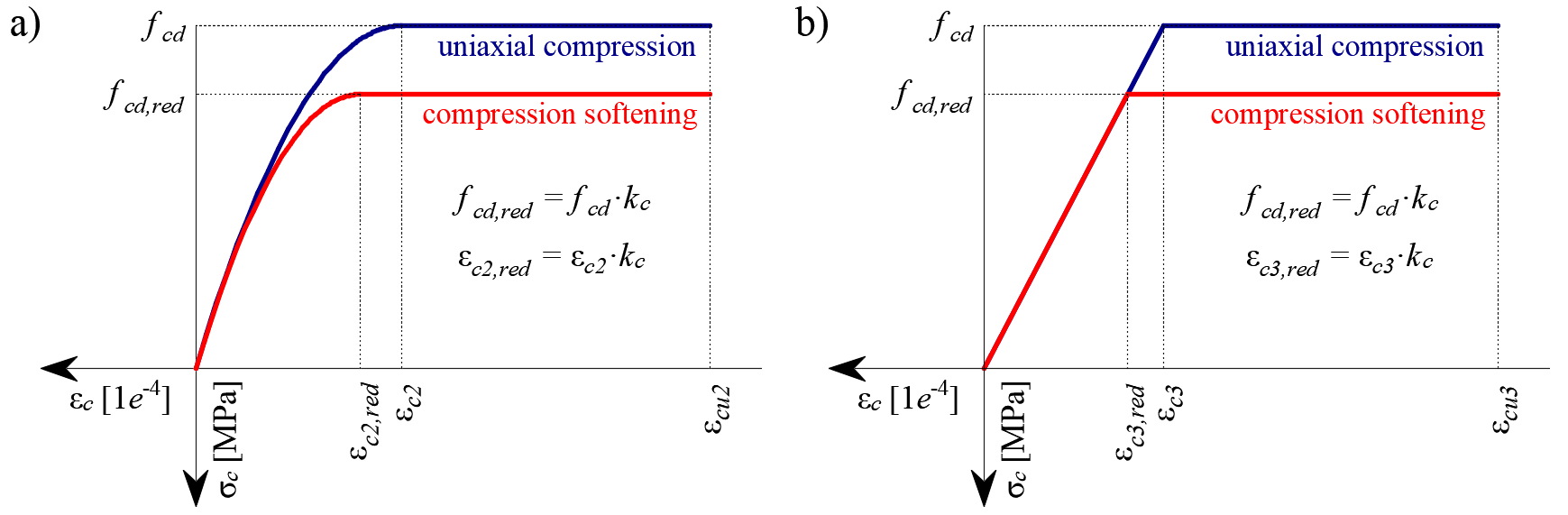
Il modello di calcestruzzo implementato nel CSFM si basa sulle leggi costitutive uniassiali a compressione prescritte dai codici di progettazione per la verifica delle sezioni trasversali, che dipendono unicamente dalla resistenza a compressione. Il diagramma parabola-rettangolo (Fig. 2c) è utilizzato per impostazione predefinita nel CSFM, ma i progettisti possono anche scegliere una relazione elastica-perfettamente plastica più semplificata. In caso di verifica secondo il codice ACI, è possibile utilizzare esclusivamente il diagramma tensione-deformazione parabola-rettangolo. Come già menzionato, la resistenza a trazione viene trascurata, come avviene nella progettazione classica del calcestruzzo armato.
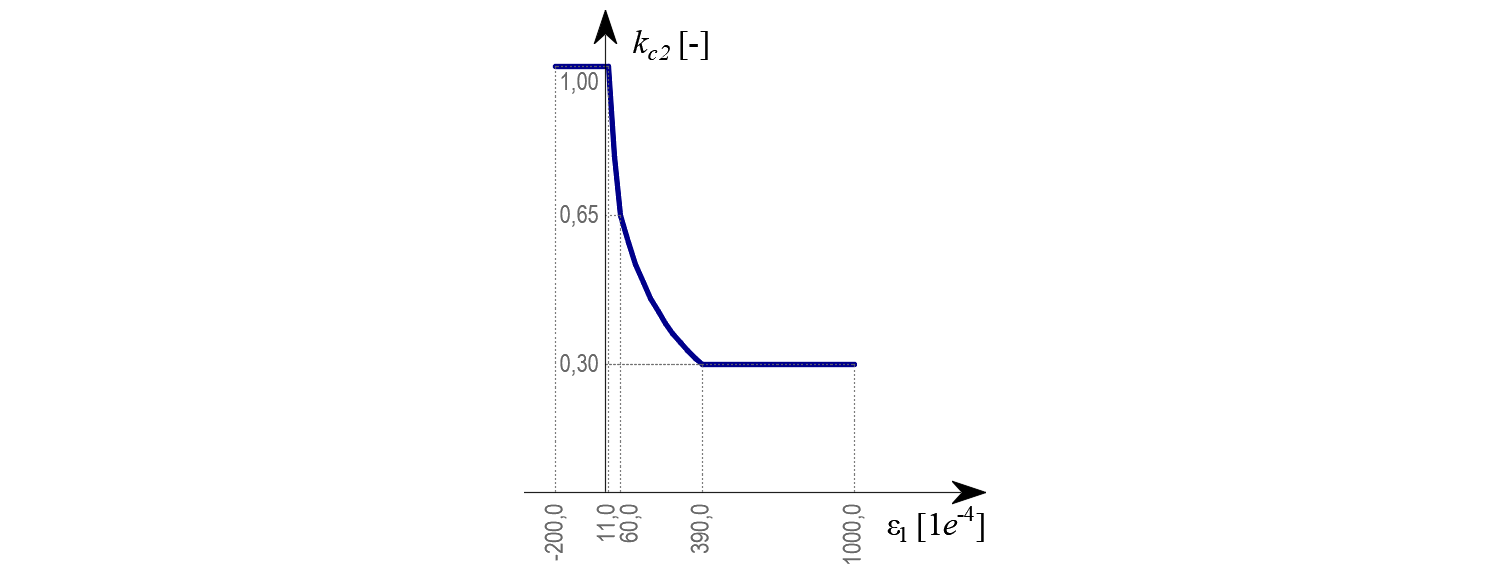
La resistenza a compressione efficace viene valutata automaticamente per il calcestruzzo fessurato in base alla deformazione principale di trazione (ε1) mediante il fattore di riduzione kc2, come mostrato nelle Fig. 2c ed e. La relazione di riduzione implementata (Fig. 2e) è una generalizzazione della proposta del fib Model Code 2010 per le verifiche a taglio, che contiene un valore limite di 0,65 per il rapporto massimo tra la resistenza efficace del calcestruzzo e la resistenza a compressione del calcestruzzo, non applicabile ad altri casi di carico.
Il CSFM in IDEA StatiCa Detail non considera un criterio di rottura esplicito in termini di deformazioni per il calcestruzzo in compressione (ovvero considera un ramo infinitamente plastico dopo il raggiungimento della tensione di picco). Questa semplificazione non consente di verificare la capacità deformativa delle strutture che collassano in compressione. Tuttavia, la loro capacità ultima è correttamente prevista quando, in aggiunta al fattore del calcestruzzo fessurato (kc2) definito in (Fig. 2e), si considera l'aumento della fragilità del calcestruzzo all'aumentare della sua resistenza mediante il fattore di riduzione \( \eta_{fc} \) definito nel fib Model Code 2010 come segue:
\[f_{c,red} = k_c \cdot f_{c} = \eta _{fc} \cdot k_{c2} \cdot f_{c}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f_{c}}}}} \right)^{\frac{1}{3}}} \le 1\]
dove:
kc è il fattore di riduzione globale della resistenza a compressione
kc2 è il fattore di riduzione dovuto alla presenza di fessurazione trasversale
fc è la resistenza caratteristica cilindrica del calcestruzzo (in MPa per la definizione di \( \eta_{fc} \)).
Vi è anche una riduzione del fattore kc2 per ragioni di stabilità del calcolo. Questa riduzione non influenza la resistenza totale degli elementi. Assumendo il valore fcd come resistenza di progetto del calcestruzzo (valore di progetto), il valore di kc2 viene ridotto secondo le seguenti regole.
σc2r < 0.11fcd kc2=1.0
0.11fcd < σc2r < 0.37fcd kc2 è un'interpolazione lineare tra 1,0 e il valore ricavato dal
grafico riportato in Fig. 2f
σc2r > 0.37fcd kc2 è ricavato direttamente dal grafico di Fig. 2f
Armatura
Si considera il diagramma bilineare idealizzato tensione-deformazione per le barre di armatura nude, tipicamente definito dai codici di progettazione (Fig. 2d). La definizione di questo diagramma richiede solo la conoscenza delle proprietà di base dell'armatura nella fase di progettazione (resistenza e classe di duttilità). È possibile definire anche una relazione tensione-deformazione definita dall'utente.
L'irrigidimento a trazione viene considerato modificando la relazione tensione-deformazione di input della barra di armatura nuda, al fine di cogliere la rigidezza media delle barre inglobate nel calcestruzzo (εm).
Modello di aderenza
Lo scorrimento tra armatura e calcestruzzo viene introdotto nel modello agli elementi finiti considerando la relazione costitutiva semplificata rigida-perfettamente plastica presentata in Fig. 2f, dove fbd è il valore di progetto (valore fattorizzato) della tensione di aderenza ultima specificata dal codice di progettazione per le specifiche condizioni di aderenza.
Si tratta di un modello semplificato con il solo scopo di verificare le prescrizioni di aderenza secondo i codici di progettazione (ovvero l'ancoraggio dell'armatura). La riduzione della lunghezza di ancoraggio mediante l'utilizzo di ganci, occhielli e forme simili delle barre può essere considerata definendo una certa capacità all'estremità dell'armatura, come verrà descritto in seguito.
1.3 Strumenti di progettazione per l'armatura
Flusso di lavoro e obiettivi
L'obiettivo degli strumenti di progettazione dell'armatura nel CSFM è aiutare i progettisti a determinare in modo efficiente la posizione e la quantità necessaria di barre di armatura. I seguenti strumenti sono disponibili per assistere/guidare l'utente in questo processo: calcolo lineare e ottimizzazione topologica.
Gli strumenti di progettazione dell'armatura considerano modelli costitutivi più semplificati rispetto ai modelli utilizzati per la verifica finale della struttura. Pertanto, la definizione dell'armatura in questa fase deve essere considerata una pre-progettazione da confermare/affinare durante la fase di verifica finale. L'utilizzo dei diversi strumenti di progettazione dell'armatura sarà illustrato nel modello mostrato in Fig. 3, che consiste in un'estremità di una trave semplicemente appoggiata a sezione variabile soggetta a un carico uniformemente distribuito.
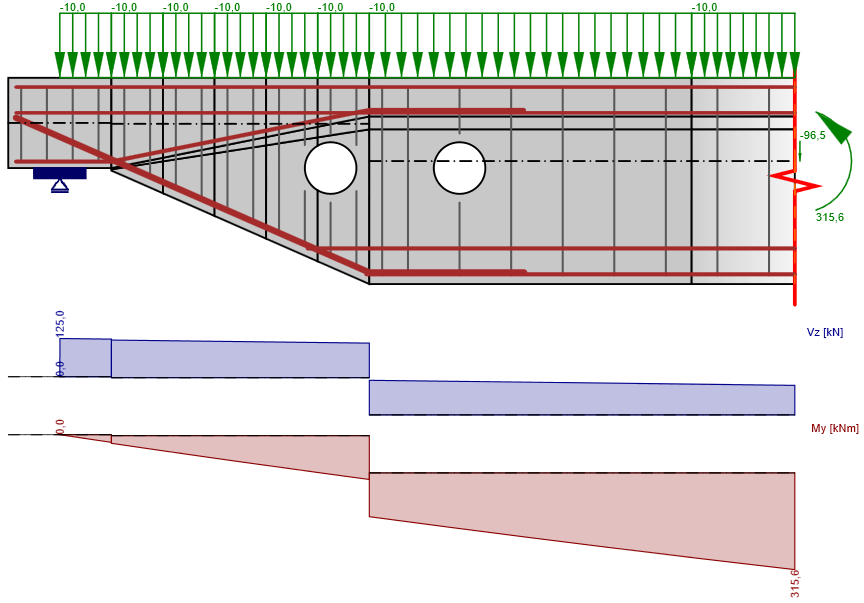
\[ \textsf{\textit{\footnotesize{Fig. 3\qquad Model used to illustrate the use of the reinforcement design tools.}}}\]
Analisi lineare
L'analisi lineare considera proprietà dei materiali lineari elastiche e trascura l'armatura nella regione in calcestruzzo. È quindi un calcolo molto rapido che fornisce una prima indicazione sulla posizione delle zone di trazione e compressione. Un esempio di tale calcolo è mostrato in Fig. 4.
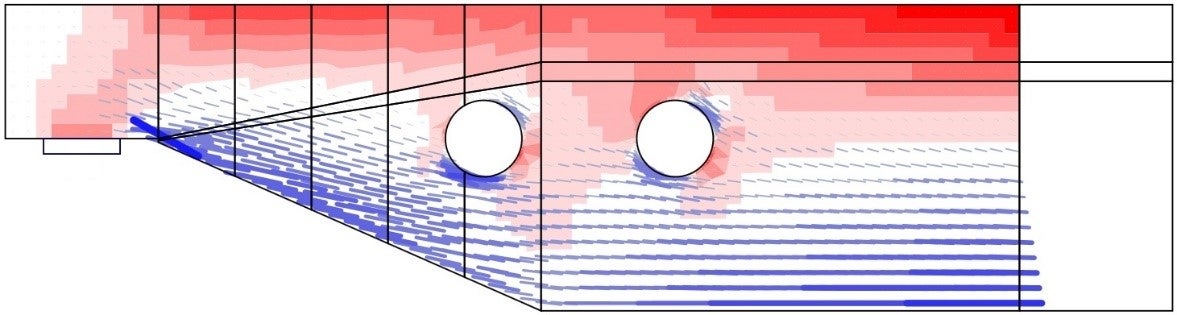
\[ \textsf{\textit{\footnotesize{Fig. 4\qquad Results from the linear analysis tool for defining reinforcement layout}}}\]
\[ \textsf{\textit{\footnotesize{(red: areas in compression, blue: areas in tension).}}}\]
Ottimizzazione topologica
L'ottimizzazione topologica è un metodo che mira a trovare la distribuzione ottimale del materiale in un dato volume per una determinata configurazione di carico. L'ottimizzazione topologica implementata in Idea StatiCa Detail utilizza un modello a elementi finiti lineare. Ogni elemento finito può avere una densità relativa da 0 a 100%, che rappresenta la quantità relativa di materiale utilizzato. Queste densità degli elementi sono i parametri di ottimizzazione nel problema di ottimizzazione. La distribuzione del materiale risultante è considerata ottimale per il dato insieme di carichi se minimizza l'energia di deformazione totale del sistema. Per definizione, la distribuzione ottimale è anche la geometria che presenta la massima rigidezza possibile per i carichi assegnati.
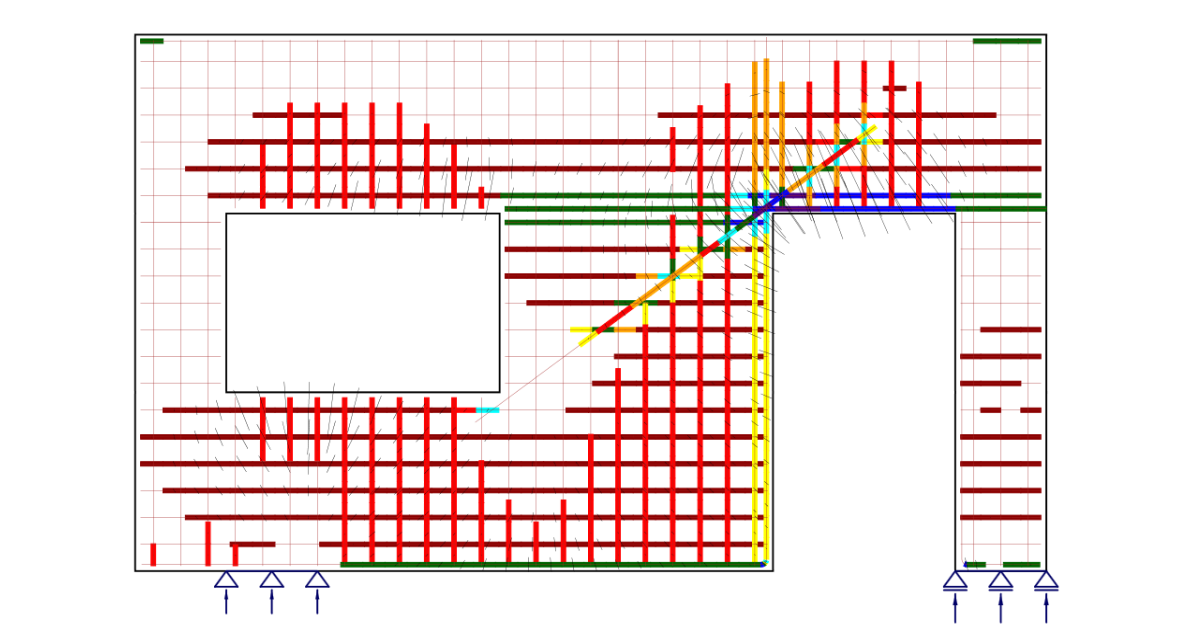
Il processo di ottimizzazione iterativo inizia con una distribuzione di densità omogenea. Il calcolo viene eseguito per più frazioni di volume totale (20%, 40%, 60% e 80%), consentendo all'utente di selezionare il risultato più pratico. La forma risultante è composta da travature con puntoni e tiranti e rappresenta la forma ottimale per i casi di carico assegnati (Fig. 5).
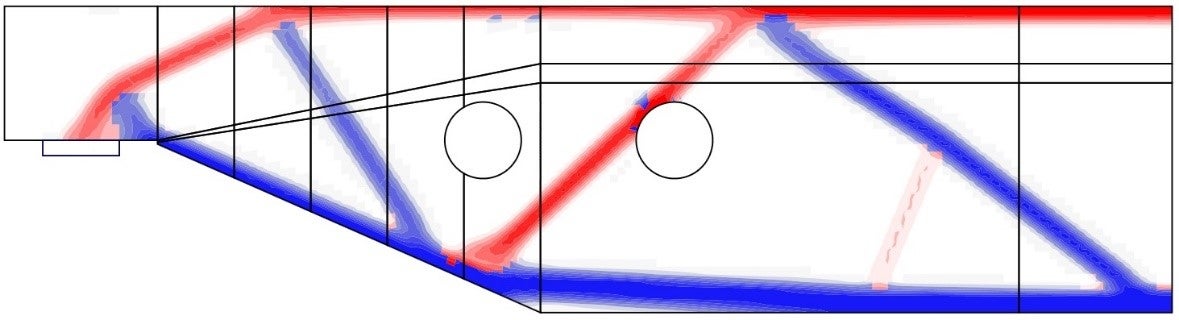
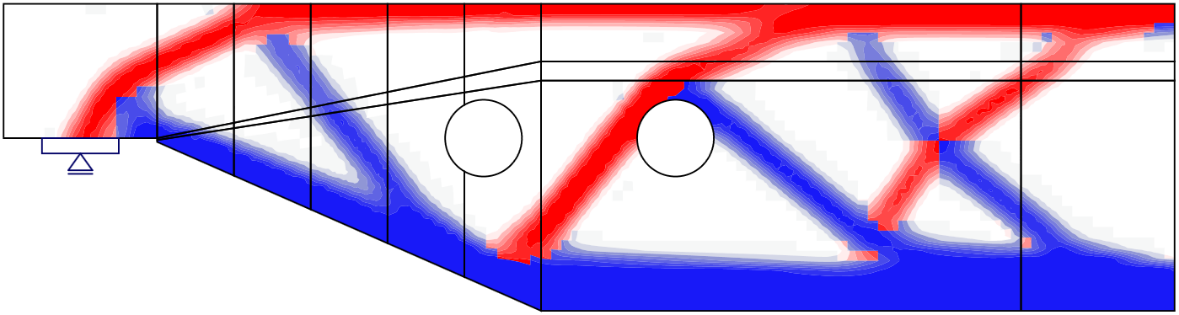
\[ \textsf{\textit{\footnotesize{Fig. 5\qquad Results from the topology optimization design tool with 20\% and 40\% effective volume}}}\]
\[ \textsf{\textit{\footnotesize{(red: areas in compression, blue: areas in tension).}}}\]
2 Modello di analisi di IDEA StatiCa Detail
2.1 Introduzione all'implementazione del Metodo degli Elementi Finiti
Il CSFM considera campi di tensione continui nel calcestruzzo (elementi finiti 2D), integrati da elementi "asta" discreti che rappresentano l'armatura (elementi finiti 1D). Pertanto, l'armatura non è diffusamente incorporata negli elementi finiti 2D in calcestruzzo, ma è modellata esplicitamente e collegata ad essi. Nel modello di calcolo si considera uno stato di tensione piana.
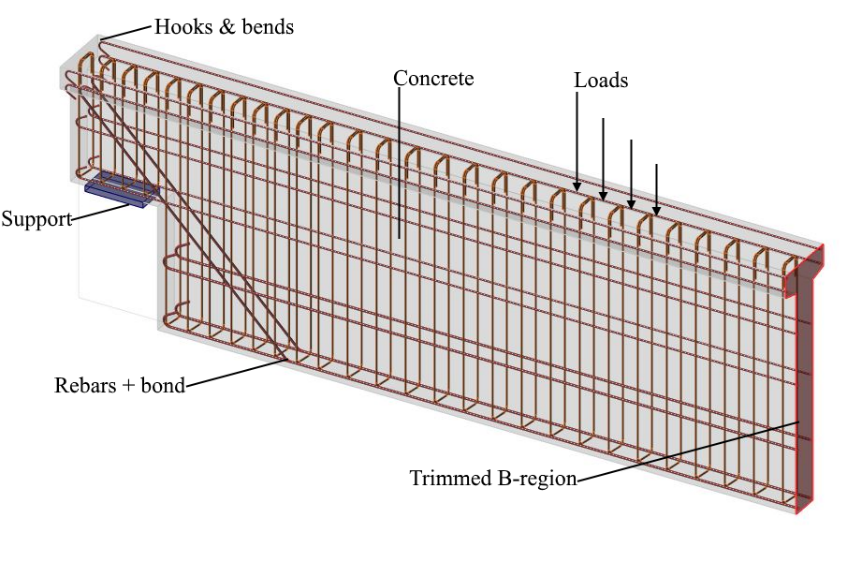
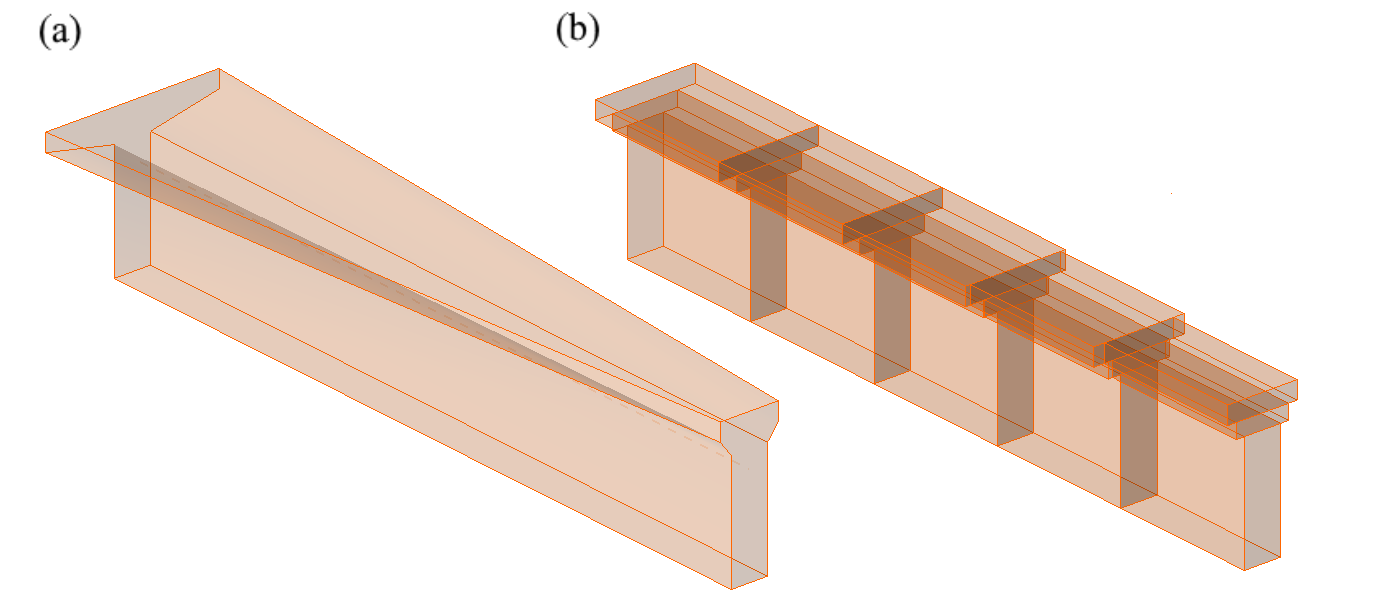
\[ \textsf{\textit{\footnotesize{Fig. 6\qquad Visualization of the calculation model of a structural element (trimmed beam) in Idea StatiCa Detail.}}}\]
È possibile modellare sia intere pareti e travi, sia dettagli (parti) di travi (regione di discontinuità isolata, denominata anche estremità rifilata). Nel caso di pareti e travi intere, i vincoli devono essere definiti in modo da ottenere una struttura (esternamente) isostatica (staticamente determinata) o iperstatica (staticamente indeterminata). Il trasferimento del carico alle estremità rifilate delle travi è introdotto mediante una speciale zona di trasferimento di Saint-Venant, che garantisce una distribuzione realistica delle tensioni nella regione di dettaglio analizzata.
2.2 Supporti e componenti di trasmissione del carico
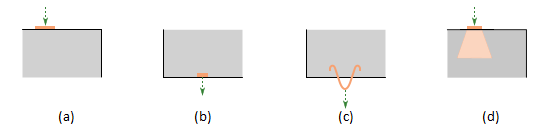
Per modellare la maggior parte delle situazioni durante il processo di costruzione, nel CSFM sono disponibili molti tipi di supporti (Fig. 7) e componenti utilizzati per il trasferimento del carico (Fig. 8).
Supporti
Il supporto puntuale può essere modellato in diversi modi per garantire che le tensioni non siano localizzate in un punto, ma distribuite su un'area più ampia. La prima opzione è un supporto puntuale distribuito (Fig. 7a), che distribuisce uniformemente il carico sul bordo dell'elemento sulla larghezza specificata.

\[ \textsf{\textit{\footnotesize{Fig. 7\qquad Various types of supports:}}}\]
\[ \textsf{\textit{\footnotesize{(a) point distributed; (b) bearing plate; (c) line support; (d) patch support; (e) hanging.}}}\]
Il supporto patch (Fig. 7d), d'altra parte, può essere posizionato solo all'interno di un volume di calcestruzzo con un raggio efficace definito. È quindi collegato tramite elementi rigidi ai nodi della rete di armatura entro questo raggio. Pertanto, è necessario definire una gabbia di armatura attorno al supporto patch.
Per una modellazione più precisa di alcuni scenari reali, sono disponibili altre due opzioni per il supporto puntuale. In primo luogo, è disponibile un supporto puntuale con una piastra di appoggio di larghezza e spessore definiti (Fig. 7b). Il materiale della piastra di appoggio può essere specificato e l'intera piastra di appoggio viene discretizzata in modo indipendente. In secondo luogo, è disponibile un supporto a sospensione (Fig. 7e), che può essere utilizzato per modellare ancoraggi di sollevamento o pioli di sollevamento.
Il supporto lineare (Fig. 7c) può essere definito su un bordo (specificandone la lunghezza) o all'interno di un elemento (tramite una polilinea). È inoltre possibile specificarne la rigidezza e/o il comportamento non lineare (supporto a compressione/trazione o solo a compressione).
- Leggi le descrizioni dettagliate in Tipi di supporti in IDEA StatiCa Detail
Componenti di trasmissione del carico
L'introduzione dei carichi nella struttura può essere modellata anche in diversi modi. Per i carichi puntuali, è possibile utilizzare una piastra di appoggio (Fig. 8a) in modo analogo al supporto puntuale, distribuendo il carico concentrato su un'area più ampia grazie a una piastra in acciaio di larghezza e spessore definiti.
\[ \textsf{\textit{\footnotesize{Fig. 8\qquad Various types of load transfer components:}}}\]
\[ \textsf{\textit{\footnotesize{(a) bearing plate; (b) patch load; (c) hanging; (d) partially loaded area.}}}\]
Il carico puntuale può essere applicato direttamente alla superficie della struttura con un raggio d'azione definito (il carico è applicato agli elementi in calcestruzzo) oppure tramite un dispositivo di trasmissione speciale denominato patch load (Fig. 8b e Fig. 9). Il patch load consente di trasmettere il carico direttamente all'armatura definita situata nell'area del raggio efficace. Per garantire il corretto funzionamento del patch load, è necessario definire un gruppo di barre di armatura che saranno interconnesse con il carico (nelle proprietà dell'armatura). Quando l'armatura interconnessa non è definita, il meccanismo di trasferimento del carico è lo stesso del carico puntuale applicato sulla superficie dell'elemento e il carico viene trasferito tramite i vincoli agli elementi in calcestruzzo, non direttamente all'armatura.
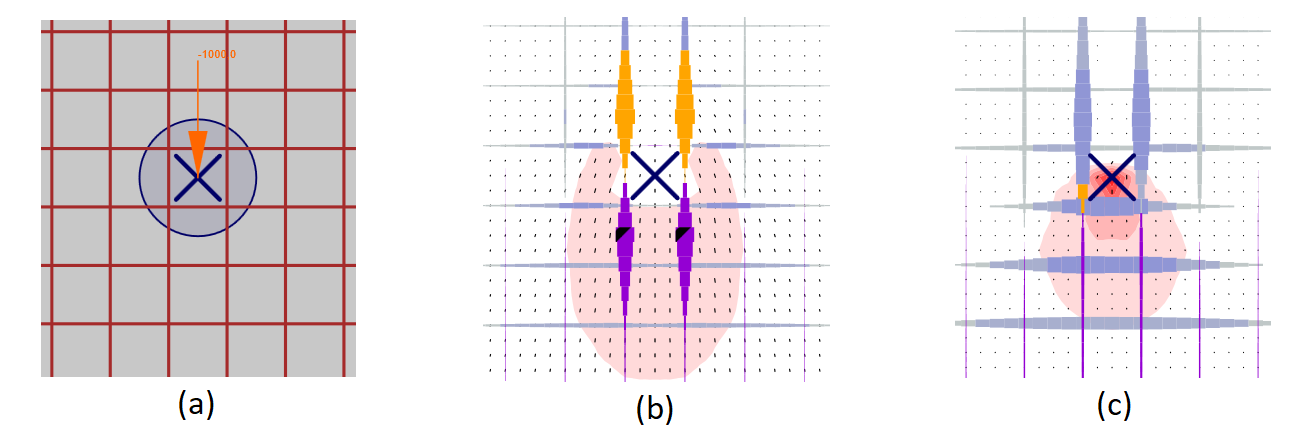
\[ \textsf{\textit{\footnotesize{Fig. 9\qquad Patch load: (a) load application; (b) load transferred through rebars (a group of bars for the load transfer is defined);}}}\]
\[ \textsf{\textit{\footnotesize{(c) load transferred through concrete (a group of bars for the load transfer is not defined).}}}\]
Gli ancoraggi di sollevamento o i pioli di sollevamento possono essere modellati tramite un carico a sospensione (Fig. 8c). L'utente può utilizzare un'area parzialmente caricata (Fig. 8d), che consente di aumentare la capacità portante del calcestruzzo a compressione secondo l'Eurocodice (non è possibile utilizzare questo tipo di componente di trasmissione del carico quando è impostato ACI). La struttura può essere caricata anche con carichi lineari sui bordi, tramite una polilinea generale o con carichi superficiali. L'applicazione Detail è in grado di considerare automaticamente il peso proprio nell'analisi.
2.3 Trasferimento del carico alle estremità ribassate delle travi
In molti casi, è necessario modellare solo un dettaglio (parte) di un elemento strutturale, come l'appoggio di una trave, un'apertura nella mezzeria della trave, ecc. Questo approccio può portare a configurazioni di vincolo instabili ma ammissibili in IDEA StatiCa Detail (incluso il caso senza vincoli). Tuttavia, in tali casi, è necessario modellare anche la sezione che rappresenta il collegamento alla regione B adiacente, incluse le forze interne in questa sezione che soddisfano l'equilibrio. In alcuni casi (ad esempio, nella modellazione dell'appoggio di una trave), queste forze interne possono essere determinate automaticamente dal programma.
Tra la regione B e la regione di discontinuità analizzata, viene creata automaticamente una zona di trasferimento di Saint-Venant per garantire una distribuzione realistica delle tensioni nella regione analizzata. La larghezza della zona di trasferimento è determinata come metà dell'altezza della sezione. Poiché l'unico scopo della zona di Saint-Venant è ottenere una corretta distribuzione delle tensioni nel resto del modello, nessun risultato di quest'area viene visualizzato nella verifica e non vengono considerati criteri di arresto in questa zona.
Il bordo della zona di Saint-Venant che rappresenta l'estremità ribassata della trave è modellato come rigido, ovvero può ruotare ma deve rimanere piano. Ciò viene realizzato collegando tutti i nodi FEM del bordo a un nodo separato nel centro di inerzia della sezione tramite un elemento a corpo rigido (RBE2). Le forze interne dell'elemento possono quindi essere applicate in questo nodo, come mostrato in Fig. 10.
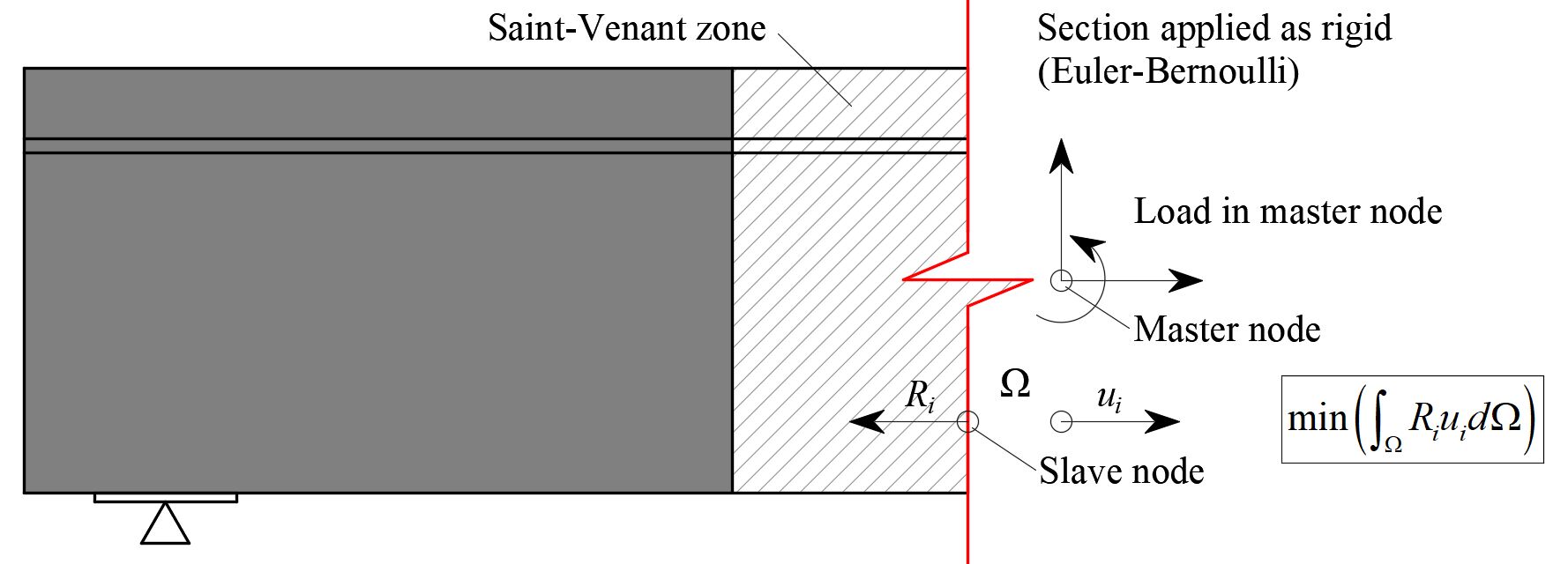
\[ \textsf{\textit{\footnotesize{Fig. 10\qquad Transfer of internal forces at a trimmed end.}}}\]
2.4 Modifica geometrica delle sezioni trasversali
La riduzione della sezione trasversale viene eseguita automaticamente per le strutture definite come trave o giunto di telaio (definite dall'asse x e da una sezione trasversale). Questa modifica viene applicata automaticamente alle sezioni trasversali con ali molto larghe (Fig. 11) ed è basata sull'ipotesi che un campo di tensioni di compressione si espanda dalla parete con un angolo di 45°, quindi la larghezza ridotta sopra menzionata sarebbe la larghezza massima in grado di trasferire i carichi
Si noti che il metodo per determinare la larghezza efficace dell'ala implementato nel CSFM è diverso da quello indicato nel punto 5.3.2.1 della EN 1992-1-1 (2015) o nel punto 9.2.4.4 della ACI 318-19. Oltre alla geometria, la larghezza efficace dell'ala basata sull'Eurocodice è esplicitamente influenzata dalle lunghezze delle campate e dalle condizioni al contorno della struttura.
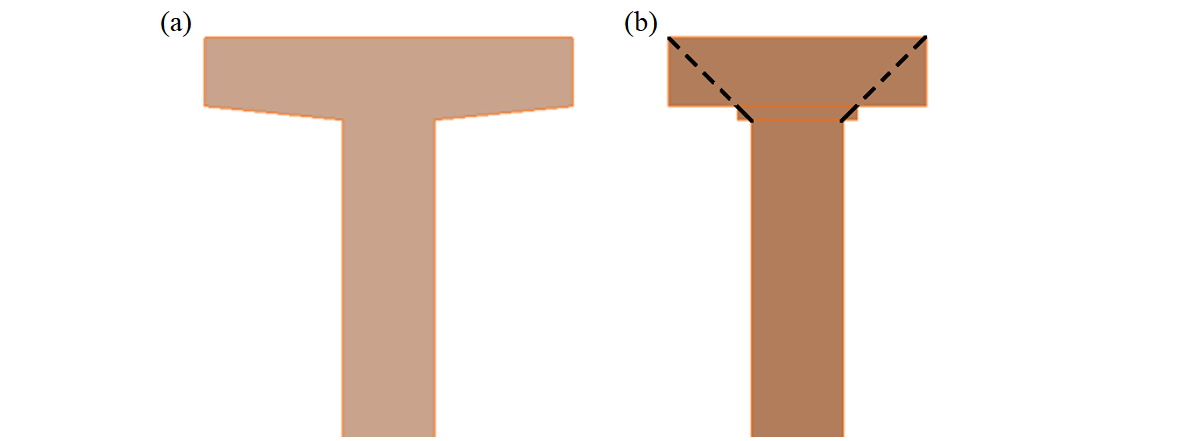
\[ \textsf{\textit{\footnotesize{Fig. 11\qquad Width reduction of a cross-section: (a) user input; (b) FE model – automatically determined reduced flange width.}}}\]
Nel caso di mensole rastremata giacenti nel piano orizzontale (Fig. 12), ogni mensola rastremata viene suddivisa in cinque sezioni lungo la sua lunghezza. Ciascuna di queste sezioni viene quindi modellata come una parete con spessore costante, pari allo spessore reale nella mezzeria della rispettiva sezione.
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Horizontal haunch: (a) user input; (b) FE model – a haunch automatically divided into five sections.}}}\]
2.5 Tipi di elementi del Metodo degli Elementi Finiti
Il modello di analisi agli elementi finiti non lineare (inelastico) è composto da diversi tipi di elementi finiti utilizzati per modellare il calcestruzzo, l'armatura e l'aderenza tra di essi. Gli elementi di calcestruzzo e di armatura vengono prima discretizzati indipendentemente e poi collegati tra loro mediante vincoli multi-punto (elementi MPC). Ciò consente all'armatura di occupare una posizione arbitraria e relativa rispetto al calcestruzzo. Se deve essere calcolata la verifica della lunghezza di ancoraggio, tra l'armatura e gli elementi MPC vengono inseriti elementi a molla di aderenza e di estremità di ancoraggio.
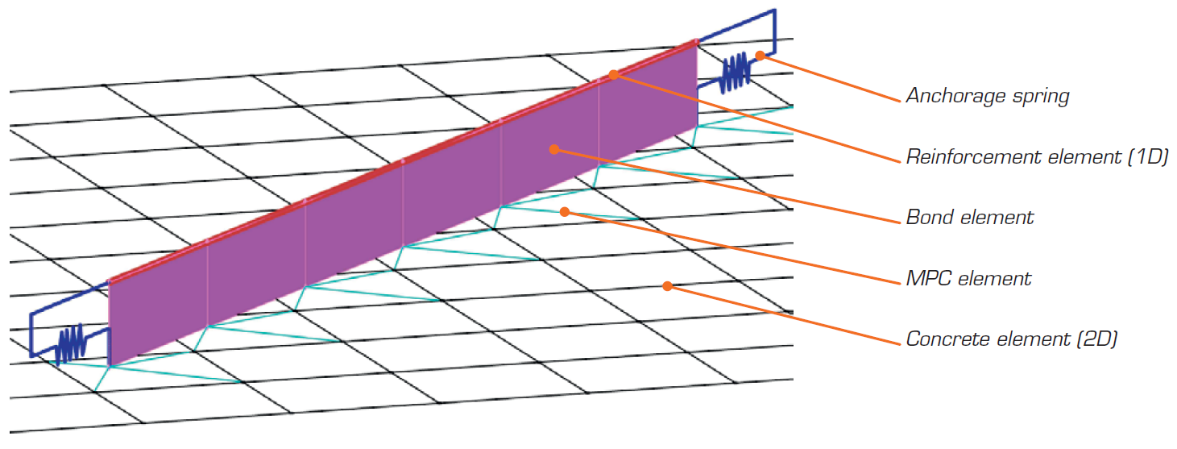
\[ \textsf{\textit{\footnotesize{Fig. 13\qquad Finite element model: reinforcement elements mapped to concrete mesh using MPC elements and bond elements.}}}\]
Calcestruzzo
Il calcestruzzo è modellato mediante elementi shell quadrilateri e trilateri, CQUAD4 e CTRIA3. Questi possono essere definiti rispettivamente da quattro o tre nodi. In questi elementi si assume l'esistenza del solo stato piano di tensione, ovvero le tensioni o le deformazioni in direzione z non vengono considerate.
Ogni elemento ha quattro o tre punti di integrazione posizionati approssimativamente a 1/4 della sua dimensione. In ciascun punto di integrazione di ogni elemento vengono calcolate le direzioni delle deformazioni principali α1, α2. In entrambe queste direzioni, le tensioni principali σc1, σc2 e le rigidezze E1, E2 vengono valutate secondo il diagramma tensione-deformazione del calcestruzzo specificato, come indicato in Fig. 2. Si noti che l'effetto dell'ammorbidimento a compressione accoppia il comportamento della direzione principale di compressione allo stato effettivo dell'altra direzione principale.
Armatura
Le barre di armatura sono modellate mediante elementi 1D a due nodi di tipo "asta" (CROD), che hanno solo rigidezza assiale. Questi elementi sono collegati a speciali elementi di "aderenza" sviluppati per modellare il comportamento di scorrimento tra una barra di armatura e il calcestruzzo circostante. Questi elementi di aderenza sono successivamente collegati tramite elementi MPC (vincoli multi-punto) alla rete che rappresenta il calcestruzzo. Questo approccio consente la discretizzazione indipendente dell'armatura e del calcestruzzo, garantendone successivamente l'interconnessione.
Elementi di aderenza
La lunghezza di ancoraggio viene verificata implementando nel modello agli elementi finiti le tensioni tangenziali di aderenza tra gli elementi di calcestruzzo (2D) e gli elementi delle barre di armatura (1D). A tal fine è stato sviluppato un tipo di elemento finito di "aderenza".
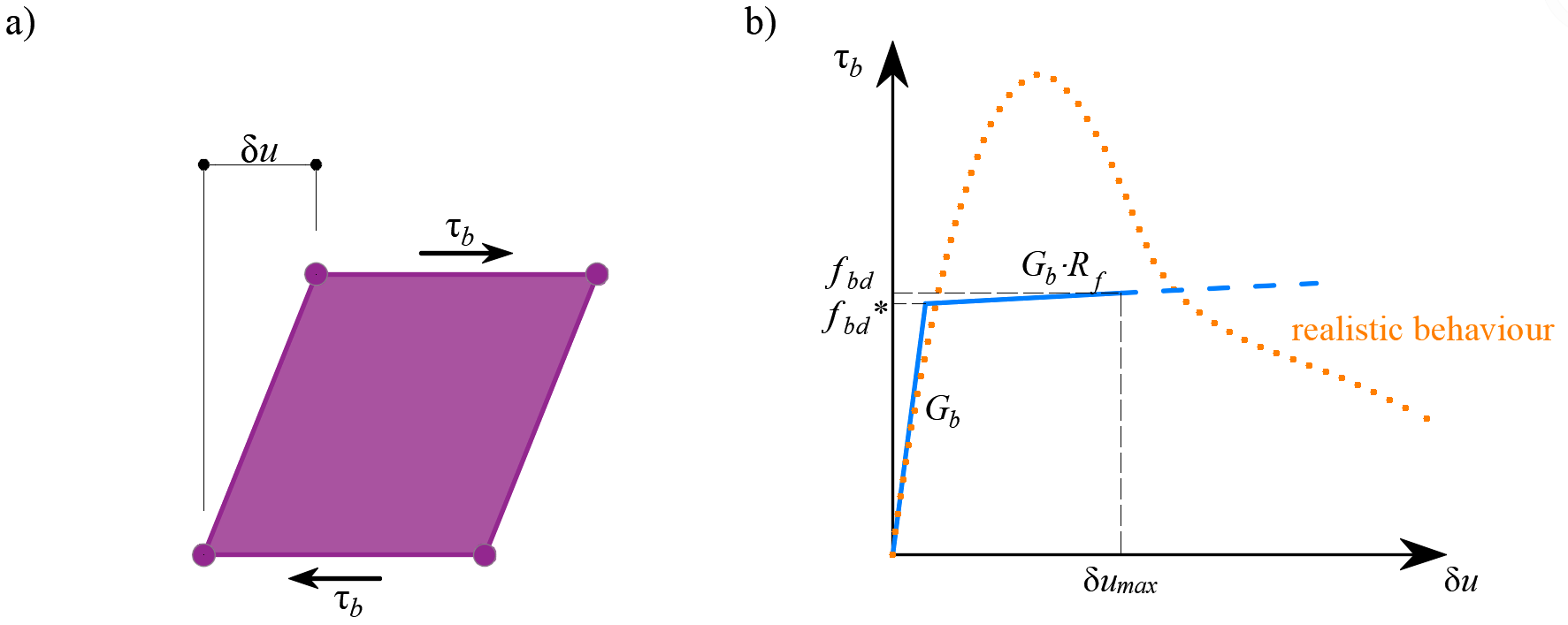
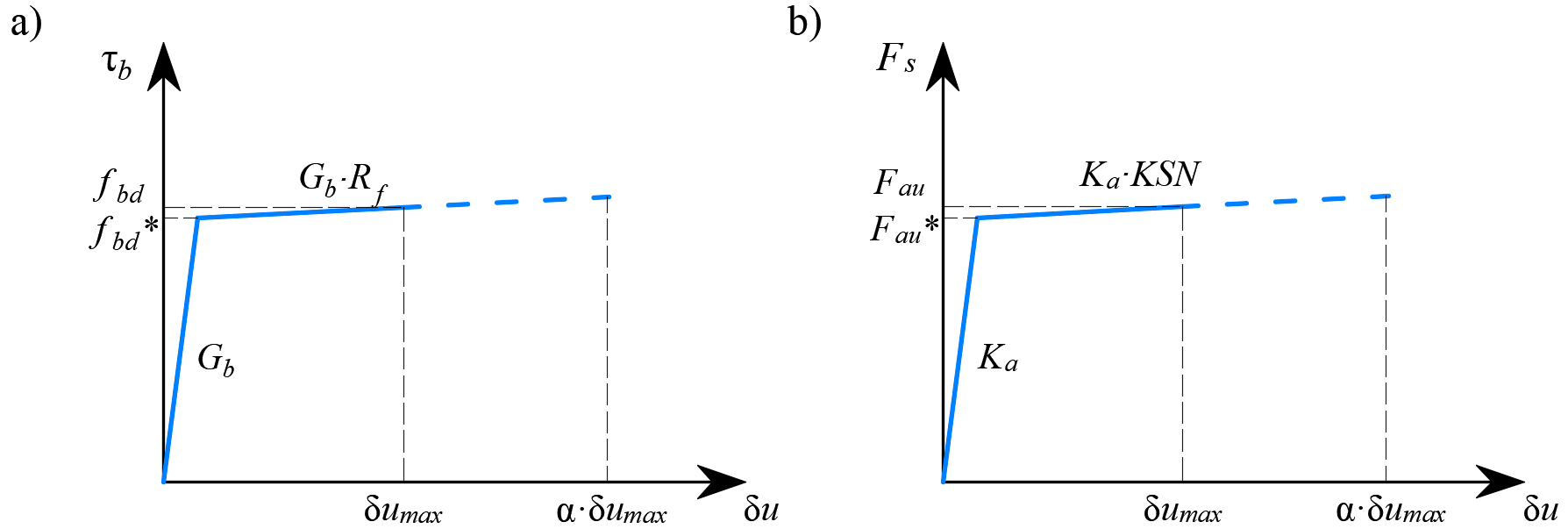
La definizione dell'elemento di aderenza è simile a quella di un elemento shell (CQUAD4). Anch'esso è definito da 4 nodi, ma a differenza di uno shell, ha una rigidezza non nulla solo a taglio tra i due nodi superiori e i due nodi inferiori. Nel modello, i nodi superiori sono collegati agli elementi che rappresentano l'armatura e i nodi inferiori a quelli che rappresentano il calcestruzzo. Il comportamento di questo elemento è descritto dalla tensione di aderenza, τb, come funzione bilineare dello scorrimento tra i nodi superiori e inferiori, δu, vedere Fig. 14.
\[ \textsf{\textit{\footnotesize{Fig. 14\qquad (a) conceptual illustration of the deformation of a bond element; (b) a stress-deformation function.}}}\]
Il modulo di rigidezza elastica della relazione aderenza-scorrimento, Gb, è definito come segue:
\[G_b = k_g \cdot \frac{E_c}{Ø}\]
dove:
kg coefficiente dipendente dalla superficie della barra di armatura (per impostazione predefinita kg = 0,2)
Ec modulo di elasticità del calcestruzzo (assunto come Ecm nel caso dell'EN)
Ø il diametro della barra di armatura
I valori di progetto (valori amplificati) della tensione tangenziale di aderenza ultima, fbd, forniti dalle rispettive norme di progettazione selezionate EN 1992-1-1 o ACI 318-19, vengono utilizzati per verificare la lunghezza di ancoraggio. L'incrudimento del ramo plastico viene calcolato per impostazione predefinita come Gb/105.
Molla di ancoraggio
La presenza di estremità di ancoraggio sulle barre di armatura (ovvero piegature, ganci, occhielli…), che soddisfa le prescrizioni delle norme di progettazione, consente la riduzione della lunghezza di ancoraggio di base delle barre (lb,net) di un certo fattore β (di seguito denominato "coefficiente di ancoraggio"). Il valore di progetto della lunghezza di ancoraggio (lb) viene quindi calcolato come segue:
\[l_b = \left(1 - \beta\right)l_{b,net}\]
La riduzione prevista di lb,net è equivalente all'attivazione della barra di armatura alla sua estremità a una percentuale della sua capacità massima data dal coefficiente di riduzione dell'ancoraggio, come mostrato in Fig. 15a.

\[ \textsf{\textit{\footnotesize{Fig. 15\qquad Model for the reduction of the anchorage length:}}}\]
\[ \textsf{\textit{\footnotesize{(a) anchorage force along the anchorage length of the reinforcing bar; (b) slip-anchorage force constitutive relationship.}}}\]
La riduzione della lunghezza di ancoraggio è inclusa nel modello agli elementi finiti mediante un elemento a molla all'estremità della barra (Fig. 15), definito dal modello costitutivo mostrato in Fig. 15b. La forza massima trasmessa da questa molla (Fau) è:
\[F_{au} = \beta \cdot A_s \cdot f_{yd}\]
dove :
β il coefficiente di ancoraggio basato sul tipo di ancoraggio,
As la sezione trasversale della barra di armatura,
fyd il valore di progetto (valore amplificato) della tensione di snervamento dell'armatura.
2.6 Rete
Gli elementi finiti sono implementati internamente e il modello di analisi viene generato automaticamente senza necessità di un'interazione esperta da parte dell'utente. Una parte importante di questo processo è la generazione della rete.
Calcestruzzo
Tutti gli elementi in calcestruzzo vengono discretizzati insieme. Una dimensione degli elementi consigliata viene calcolata automaticamente dall'applicazione in base alle dimensioni e alla forma della struttura, tenendo conto del diametro della barra di armatura più grande. Inoltre, la dimensione degli elementi consigliata garantisce che vengano generati almeno 4 elementi nelle parti sottili della struttura, come colonne snelle o solette sottili, per assicurare risultati affidabili in queste zone. Il numero massimo di elementi in calcestruzzo è limitato a 5000, ma questo valore è sufficiente per fornire la dimensione degli elementi consigliata per la maggior parte delle strutture. I progettisti possono sempre selezionare una dimensione degli elementi in calcestruzzo definita dall'utente modificando il moltiplicatore della dimensione di rete predefinita.
Armatura
L'armatura è suddivisa in elementi con lunghezza approssimativamente uguale alla dimensione degli elementi in calcestruzzo. Una volta generate le reti di armatura e calcestruzzo, queste vengono interconnesse con elementi di aderenza come mostrato in Fig. 13.
Piastre di appoggio
Le parti strutturali ausiliarie, come le piastre di appoggio, vengono discretizzate indipendentemente. La dimensione di questi elementi è calcolata come 2/3 della dimensione degli elementi in calcestruzzo nell'area di collegamento. I nodi della rete della piastra di appoggio vengono quindi collegati ai nodi di bordo della rete in calcestruzzo mediante elementi di vincolo a interpolazione (RBE3).
Carichi e vincoli
I carichi distribuiti su area e i vincoli distribuiti su area sono collegati esclusivamente all'armatura, come mostrato in Fig. 16. È pertanto necessario definire l'armatura attorno ad essi. Il collegamento a tutti i nodi dell'armatura entro il raggio efficace è garantito da elementi RBE3 con peso uguale.
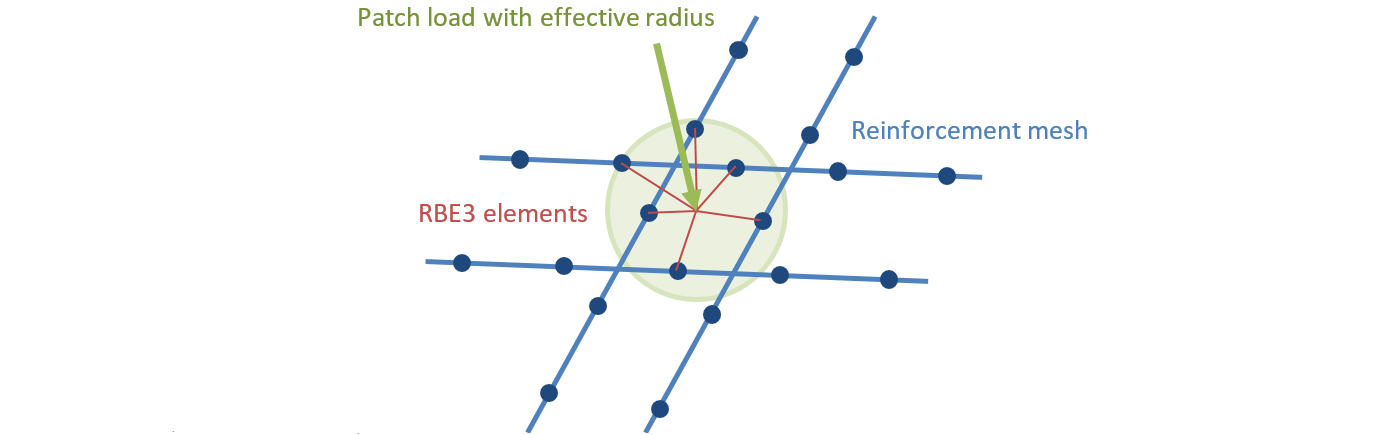
\[ \textsf{\textit{\footnotesize{Fig. 16\qquad Patch load mapping to reinforcement mesh.}}}\]
I vincoli lineari e i carichi lineari sono collegati ai nodi della rete in calcestruzzo mediante elementi RBE3 in base alla larghezza specificata o al raggio efficace. Il peso dei collegamenti è inversamente proporzionale alla distanza dal vincolo o dall'impulso di carico.
- Per ulteriori informazioni sull'interconnessione tra i singoli carichi e la rete, consultare Descrizione generale degli impulsi di carico nell'applicazione Detail
2.7 Metodo di soluzione e algoritmo di controllo del carico
Per trovare la soluzione a un problema FEM non lineare viene utilizzato un algoritmo standard di Newton-Raphson (NR) completo.
In generale, l'algoritmo NR non converge spesso quando il carico completo viene applicato in un unico passo. Un approccio comune, utilizzato anche in questo caso, consiste nell'applicare il carico in modo sequenziale in più incrementi, utilizzando il risultato dell'incremento di carico precedente come punto di partenza per la soluzione di Newton dell'incremento successivo. A tale scopo, è stato implementato un algoritmo di controllo del carico sopra il Newton-Raphson. Nel caso in cui le iterazioni NR non convergano, l'incremento di carico corrente viene ridotto alla metà del suo valore e le iterazioni NR vengono ripetute.
Un secondo scopo dell'algoritmo di controllo del carico è trovare il carico critico, che corrisponde a determinati "criteri di arresto" – in particolare la deformazione massima nel calcestruzzo, lo scorrimento massimo negli elementi di aderenza, lo spostamento massimo negli elementi di ancoraggio e la deformazione massima nelle barre di armatura. Il carico critico viene trovato con il metodo della bisezione. Nel caso in cui il criterio di arresto venga superato in qualsiasi punto del modello, i risultati dell'ultimo incremento di carico vengono scartati e viene calcolato un nuovo incremento di metà dimensione rispetto al precedente. Questo processo viene ripetuto fino a quando il carico critico non viene trovato con una certa tolleranza di errore.
Per il calcestruzzo, il criterio di arresto è stato impostato a una deformazione del 5% in compressione (ovvero circa un ordine di grandezza superiore alla deformazione di rottura effettiva del calcestruzzo) e del 7% in trazione nei punti di integrazione degli elementi shell. In trazione, il valore è stato impostato per consentire il raggiungimento della deformazione limite nell'armatura, che di solito è intorno al 5% senza tener conto dell'irrigidimento a trazione. In compressione, il valore è stato scelto tra diverse alternative come quello sufficientemente grande da rendere visibili gli effetti dello schiacciamento nei risultati, ma sufficientemente piccolo da non causare troppi problemi di stabilità numerica.
\[ \textsf{\textit{\footnotesize{Fig. 17\qquad Constitutive relationship of bond and anchorage elements used for anchorage length verification:}}}\]
\[ \textsf{\textit{\footnotesize{(a) bond shear stress slip response of a bond element; (b) force-displacement response of an anchorage element.}}}\]
Per l'armatura, il criterio di arresto è definito in termini di tensioni. Poiché vengono modellate le tensioni alla fessura, il criterio in trazione corrisponde alla resistenza a trazione dell'armatura tenendo conto del coefficiente di sicurezza. Lo stesso valore viene utilizzato per il criterio in compressione.
Il criterio di arresto negli elementi di aderenza e nelle molle di ancoraggio è α·δumax, dove δumax è lo scorrimento massimo utilizzato nelle verifiche normative e α = 10.
2.8 Presentazione dei risultati
I risultati sono presentati in modo indipendente per il calcestruzzo e per gli elementi di armatura. I valori di tensione e deformazione nel calcestruzzo sono calcolati nei punti di integrazione degli elementi shell. Tuttavia, poiché non è pratico presentare i dati in tale modo, i risultati sono presentati per impostazione predefinita nei nodi, come il valore massimo della tensione di compressione dai punti di integrazione di Gauss adiacenti negli elementi connessi (Fig. 18). È opportuno notare che questa rappresentazione potrebbe localmente sottostimare i risultati ai bordi compressi degli elementi nel caso in cui la dimensione dell'elemento finito sia simile alla profondità della zona compressa.
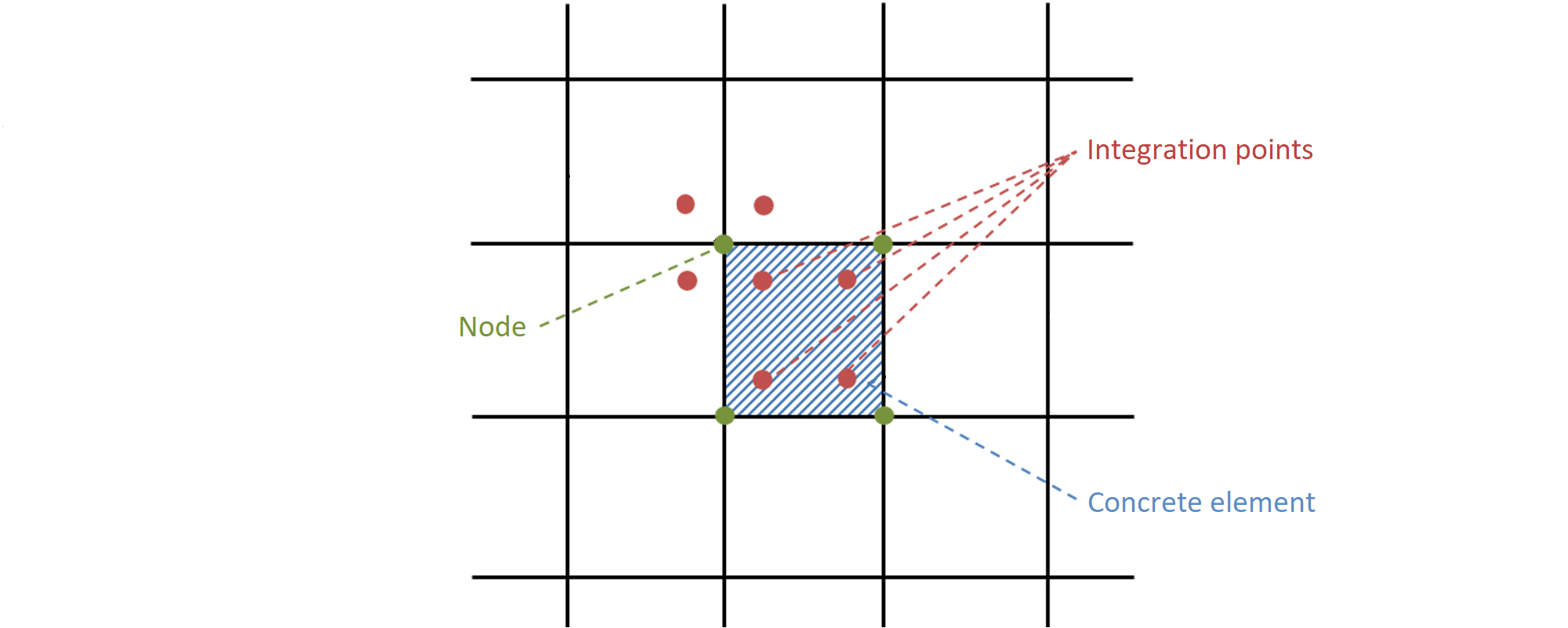
Fig. 18 - Elemento finito in calcestruzzo con punti di integrazione e nodi: presentazione dei risultati per il calcestruzzo nei nodi e negli elementi finiti.
I risultati per gli elementi finiti di armatura sono costanti per ciascun elemento (un valore – ad es., per le tensioni nell'acciaio) oppure lineari (due valori – per i risultati di aderenza). Per gli elementi ausiliari, come gli elementi delle piastre di appoggio, vengono presentate solo le deformazioni.
3 Verifica del modello
3.1 Stati limite e calcolo dell'ampiezza delle fessure
La valutazione della struttura mediante il CSFM viene eseguita con due analisi distinte: una per le combinazioni di carico agli stati limite di esercizio e una per gli stati limite ultimi. L'analisi agli stati limite di esercizio presuppone che il comportamento ultimo dell'elemento sia soddisfacente e che le condizioni di snervamento del materiale non vengano raggiunte ai livelli di carico di esercizio. Questo approccio consente l'utilizzo di modelli costitutivi semplificati (con un ramo lineare del diagramma tensione-deformazione del calcestruzzo) per l'analisi agli stati limite di esercizio, al fine di migliorare la stabilità numerica e la velocità di calcolo. Si raccomanda pertanto di adottare il flusso di lavoro presentato di seguito, in cui l'analisi allo stato limite ultimo viene eseguita come primo passo.
Analisi allo stato limite ultimo
Le diverse verifiche richieste dai codici di progettazione specifici vengono valutate sulla base dei risultati diretti forniti dal modello. Le verifiche allo SLU vengono eseguite per la resistenza del calcestruzzo, la resistenza dell'armatura e l'ancoraggio (tensioni tangenziali di aderenza).
Per garantire un progetto efficiente dell'elemento strutturale, si raccomanda vivamente di eseguire un'analisi preliminare che tenga conto dei seguenti passaggi:
- Selezionare le combinazioni di carico più critiche.
- Calcolare solo le combinazioni di carico allo Stato Limite Ultimo (SLU).
- Utilizzare una rete grossolana (aumentando il moltiplicatore della dimensione predefinita della rete in Setup (Fig. 19)).

\[ \textsf{\textit{\footnotesize{Fig. 19\qquad Mesh multiplier.}}}\]
Tale modello verrà calcolato molto rapidamente, consentendo ai progettisti di esaminare in modo efficiente i dettagli dell'elemento strutturale e di rieseguire l'analisi fino al soddisfacimento di tutti i requisiti di verifica per le combinazioni di carico più critiche. Una volta soddisfatti tutti i requisiti di verifica di questa analisi preliminare, si suggerisce di includere le combinazioni di carico ultime complete e di utilizzare una dimensione della rete fine (la dimensione della rete raccomandata dal programma). L'utente può modificare la dimensione della rete tramite il moltiplicatore, che può assumere valori da 0,5 a 5 (Fig. 19).
I risultati e le verifiche di base (tensione, deformazione e sfruttamento (ovvero il valore calcolato/valore limite dalla norma), nonché la direzione delle tensioni principali nel caso di elementi in calcestruzzo) vengono visualizzati tramite diversi diagrammi in cui la compressione è generalmente rappresentata in rosso e la trazione in blu. I valori minimi e massimi globali per l'intera struttura possono essere evidenziati, così come i valori minimi e massimi per ogni parte definita dall'utente. In una scheda separata del programma è possibile visualizzare risultati avanzati quali i valori tensoriali, le deformazioni della struttura e i tassi di armatura (effettivi e geometrici) utilizzati per il calcolo dell'irrigidimento a trazione delle barre di armatura. Inoltre, è possibile presentare i carichi e le reazioni per le combinazioni o i casi di carico selezionati.
Analisi allo stato limite di esercizio
Le verifiche allo SLE vengono eseguite per la limitazione delle tensioni, l'ampiezza delle fessure e i limiti di deformazione. Le tensioni vengono verificate negli elementi in calcestruzzo e di armatura secondo la norma applicabile, in modo analogo a quanto specificato per lo SLU.
L'analisi agli stati limite di esercizio contiene alcune semplificazioni dei modelli costitutivi utilizzati per l'analisi allo stato limite ultimo. Si assume un'aderenza perfetta, ovvero la lunghezza di ancoraggio non viene verificata in esercizio. Inoltre, il ramo plastico della curva tensione-deformazione del calcestruzzo a compressione viene trascurato, mentre il ramo elastico è lineare e infinito. Queste semplificazioni migliorano la stabilità numerica e la velocità di calcolo e non riducono la generalità della soluzione, a condizione che i limiti di tensione dei materiali risultanti in esercizio siano chiaramente al di sotto dei loro punti di snervamento (come richiesto dalle norme). Pertanto, i modelli semplificati utilizzati per l'esercizio sono validi solo se tutti i requisiti di verifica sono soddisfatti.
Calcolo dell'ampiezza delle fessure e irrigidimento a trazione
Calcolo dell'ampiezza delle fessure
Esistono due metodi per il calcolo delle ampiezze delle fessure: fessurazione stabilizzata e non stabilizzata. In base al rapporto geometrico di armatura in ciascuna parte della struttura viene determinato quale tipo di modello di calcolo delle fessure verrà utilizzato (TCM per la fessurazione stabilizzata e POM per il modello di fessurazione non stabilizzata).
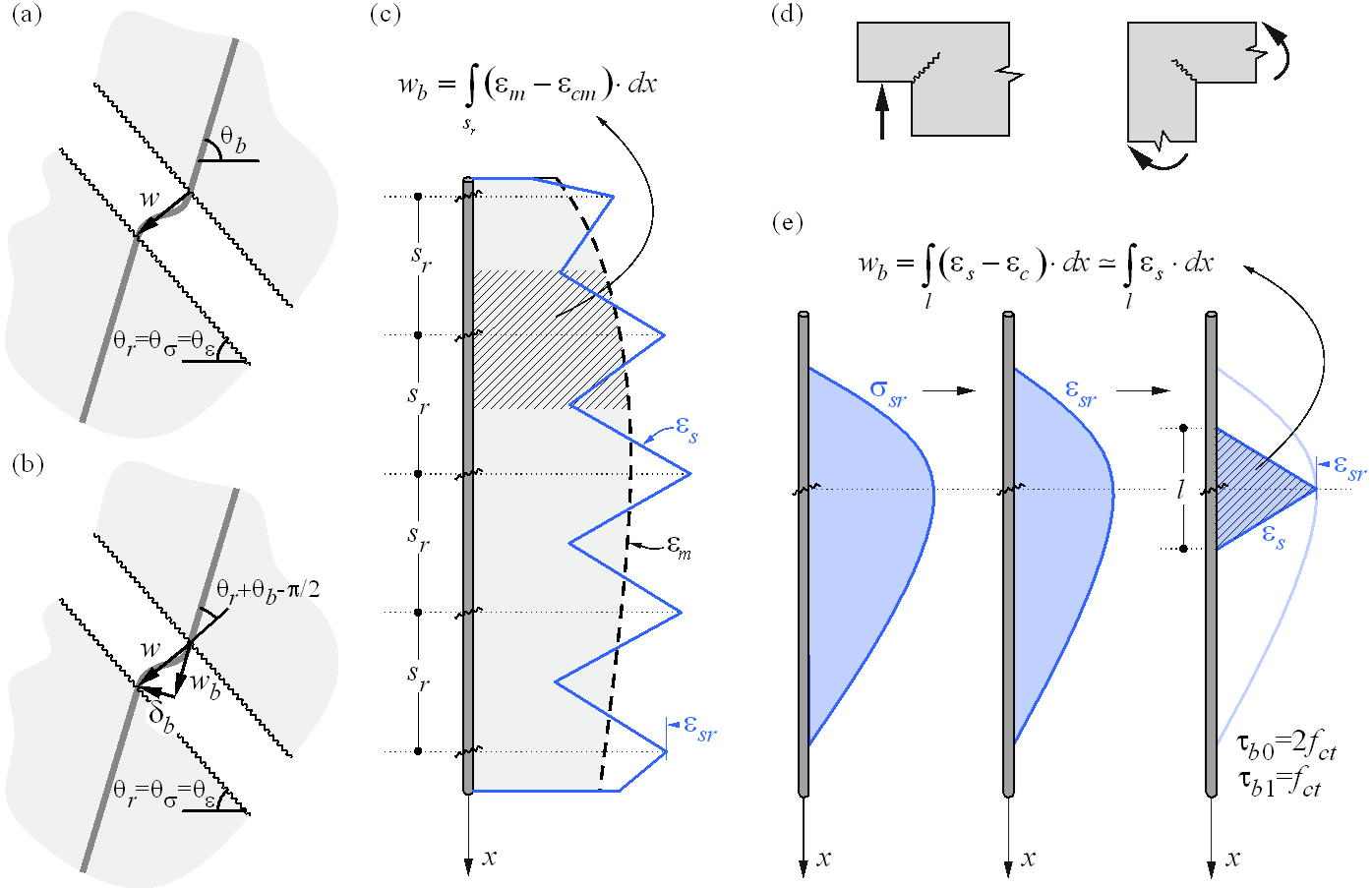
\( \textsf{\textit{\footnotesize{Fig. 20 \qquad Crack width calculation: (a) considered crack kinematics; (b) projection of crack kinematics into the principal}}}\) \( \textsf{\textit{\footnotesize{directions of the reinforcing bar; (c) crack width in the direction of the reinforcing bar for stabilized cracking; (d) cases with}}}\) \( \textsf{\textit{\footnotesize{local non-stabilized cracking regardless of the reinforcement amount; (e) crack width in the direction of the reinforcing bar}}}\)\( \textsf{\textit{\footnotesize{for non-stabilized cracking.}}}\)
Mentre il CSFM fornisce un risultato diretto per la maggior parte delle verifiche (ad es. capacità dell'elemento, frecce…), i risultati dell'ampiezza delle fessure sono calcolati dai risultati delle deformazioni dell'armatura forniti direttamente dall'analisi FE seguendo la metodologia descritta nella Fig. 20. Si considera una cinematica della fessura senza scorrimento (apertura pura della fessura) (Fig. 20a), coerente con le ipotesi principali del modello. Le direzioni principali di tensioni e deformazioni definiscono l'inclinazione delle fessure (θr = θs= θe). Secondo la (Fig. 20b), l'ampiezza della fessura (w) può essere proiettata nella direzione della barra d'armatura (wb), ottenendo:
\[w = \frac{w_b}{\cos\left(θ_r + θ_b - \frac{π}{2}\right)}\]
dove θb è l'inclinazione della barra.
Si noti che il programma visualizza i valori di θr e θb < π/2. Ciò significa che l'equazione precedente è valida per i casi in cui l'armatura e la fessura attraversano quadranti diversi del sistema di coordinate cartesiane, come mostrato nella Fig. 20, dove l'armatura attraversa il I e il III quadrante e la fessura il II e il IV. Per i casi in cui l'armatura e la fessura attraversano gli stessi quadranti, l'equazione deve essere modificata come segue:
\[w = \frac{w_b}{\cos\left(-θ_r + θ_b + \frac{π}{2}\right)}\]
La componente wb è calcolata in modo coerente sulla base dei modelli di irrigidimento a trazione integrando le deformazioni dell'armatura. Per le regioni con schemi di fessurazione completamente sviluppati, le deformazioni medie calcolate (em) lungo le barre d'armatura sono integrate direttamente lungo l'interasse delle fessure (sr), come indicato nella (Fig. 20c). Sebbene questo approccio al calcolo delle direzioni delle fessure non corrisponda alla posizione reale delle fessure, fornisce comunque valori rappresentativi che portano a risultati di ampiezza delle fessure confrontabili con i valori di ampiezza delle fessure richiesti dalla normativa nella posizione della barra d'armatura.
Situazioni particolari si osservano agli angoli concavi della struttura calcolata. In questo caso, l'angolo predefinisce la posizione di una singola fessura che si comporta in modo non stabilizzato prima che si sviluppino ulteriori fessure adiacenti. Queste fessure aggiuntive si sviluppano generalmente dopo il campo di esercizio (Mata-Falcón 2015), il che giustifica il calcolo delle ampiezze delle fessure in tale regione come se fossero non stabilizzate (Fig. 21).
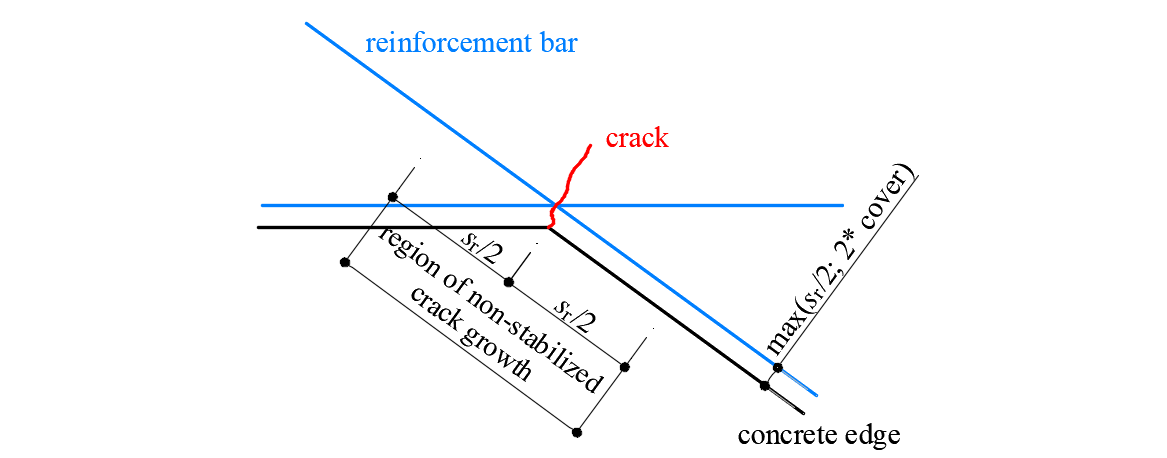
\[ \textsf{\textit{\footnotesize{Fig. 21\qquad Definition of the region at concave corners in which the crack width is computed as if it were non-stabilized.}}}\]
Irrigidimento a trazione
L'implementazione dell'irrigidimento a trazione distingue tra casi di schemi di fessurazione stabilizzata e non stabilizzata. In entrambi i casi, il calcestruzzo è considerato completamente fessurato prima del carico per impostazione predefinita.
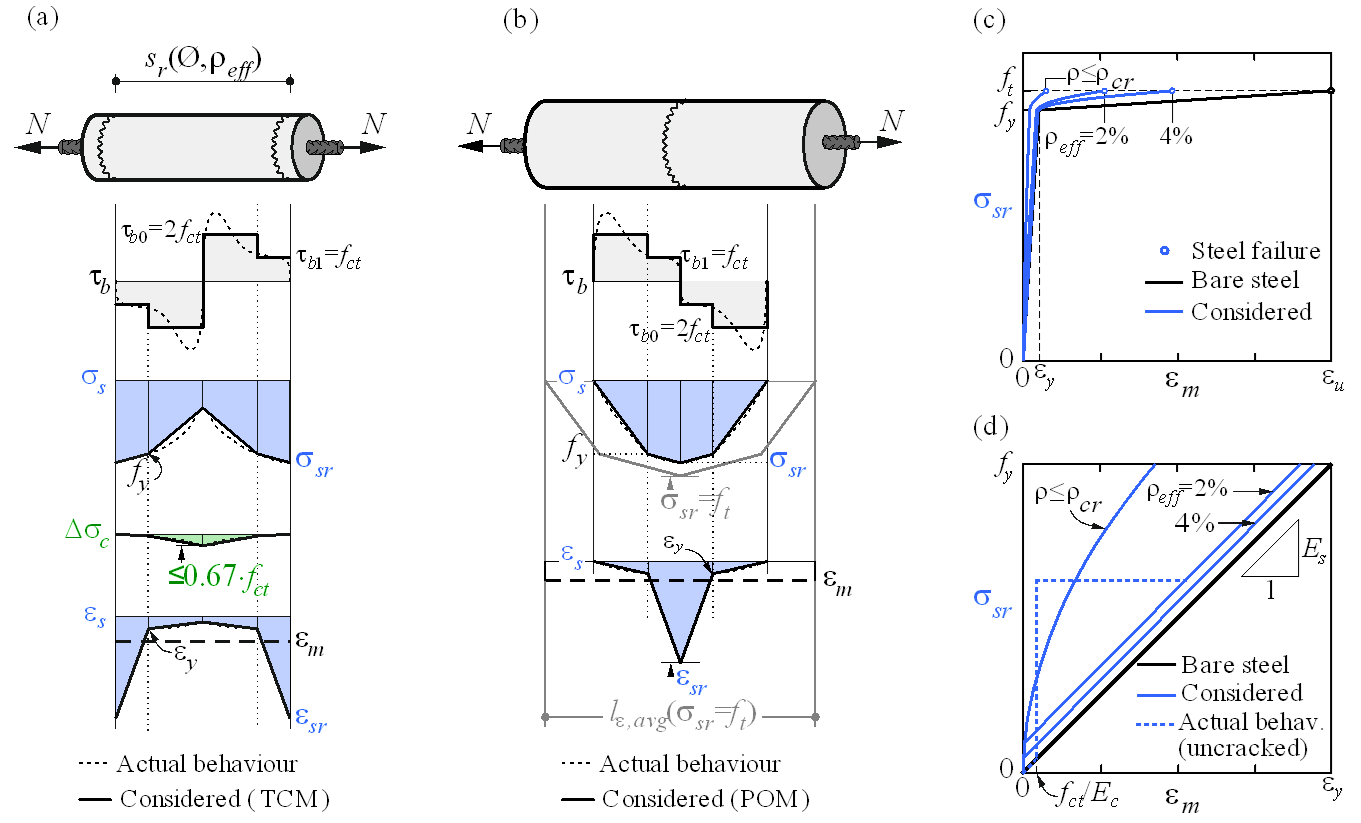
\( \textsf{\textit{\footnotesize{Fig. 22\qquad Tension stiffening model: (a) tension chord element for stabilized cracking with distribution of bond shear,}}}\) \( \textsf{\textit{\footnotesize{steel and concrete stresses, and steel strains between cracks, considering average crack spacing); (b) pull-out assumption}}}\) \( \textsf{\textit{\footnotesize{for non-stabilized cracking with distribution of bond shear and steel stresses and strains around the crack; (c) resulting}}}\) \( \textsf{\textit{\footnotesize{tension chord behavior in terms of reinforcement stresses at the cracks and average strains for European B500B steel;}}}\) \( \textsf{\textit{\footnotesize{(d) detail of the initial branches of the tension chord response.}}}\)
Fessurazione stabilizzata
In schemi di fessurazione completamente sviluppati, l'irrigidimento a trazione viene introdotto utilizzando il Tension Chord Model (TCM) (Marti et al. 1998; Alvarez 1998) – Fig. 22a – che ha dimostrato di fornire eccellenti previsioni di risposta nonostante la sua semplicità (Burns 2012). Il TCM assume una relazione tensione di aderenza-scorrimento a gradini, rigida e perfettamente plastica, con τb = τb0 =2 fctm per σs ≤ fy e τb =τb1 = fctm per σs > fy. Trattando ogni barra d'armatura come un elemento di trazione – Fig. 22b e Fig. 22a – la distribuzione dell'aderenza, delle tensioni nell'acciaio e nel calcestruzzo e quindi la distribuzione delle deformazioni tra due fessure può essere determinata per qualsiasi valore dato delle tensioni massime nell'acciaio (o deformazioni) alle fessure.
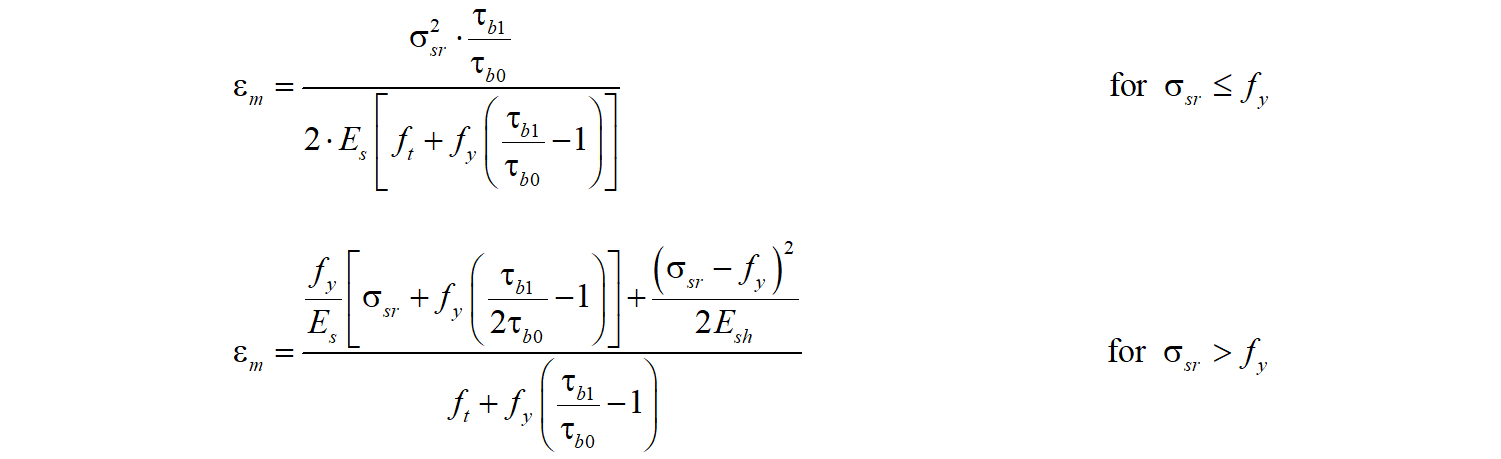
Per sr = sr0, una nuova fessura può formarsi o meno poiché al centro tra due fessure σc1 = fct. Di conseguenza, l'interasse delle fessure può variare di un fattore due, ovvero sr = λsr0, con l = 0.5…1.0. Assumendo un certo valore per λ, la deformazione media dell'elemento di trazione (εm) può essere espressa come funzione delle tensioni massime nell'armatura (ovvero le tensioni alle fessure, σsr). Per il diagramma tensione-deformazione bilineare idealizzato per le barre d'armatura nude considerato per impostazione predefinita nel CSFM, si ottengono le seguenti espressioni analitiche in forma chiusa (Marti et al. 1998):
\[\varepsilon_m = \frac{\sigma_{sr}}{E_s} - \frac{\tau_{b0}s_r}{E_s Ø}\]
\[\textrm{for}\qquad\qquad\sigma_{sr} \le f_y\]
\[{\varepsilon_m} = \frac{{{{\left( {{\sigma_{sr}} - {f_y}} \right)}^2}Ø}}{{4{E_{sh}}{\tau _{b1}}{s_r}}}\left( {1 - \frac{{{E_{sh}}{\tau_{b0}}}}{{{E_s}{\tau_{b1}}}}} \right) + \frac{{\left( {{\sigma_{sr}} - {f_y}} \right)}}{{{E_s}}}\frac{{{\tau_{b0}}}}{{{\tau_{b1}}}} + \left( {{\varepsilon_y} - \frac{{{\tau_{b0}}{s_r}}}{{{E_s}Ø}}} \right)\]
\[\textrm{for}\qquad\qquad{f_y} \le {\sigma _{sr}} \le \left( {{f_y} + \frac{{2{\tau _{b1}}{s_r}}}{Ø}} \right)\]
\[ \varepsilon_m = \frac{f_s}{E_s} + \frac{\sigma_{sr}-f_y}{E_{sh}} - \frac{\tau_{b1} s_r}{E_{sh} Ø}\]
\[\textrm{for}\qquad\qquad\left(f_y + \frac{2\tau_{b1}s_r}{Ø}\right) \le \sigma_{sr} \le f_t\]
dove:
Esh il modulo di incrudimento dell'acciaio Esh = (ft – fy)/(εu – fy /Es) ,
Es modulo di elasticità dell'armatura,
Ø diametro della barra d'armatura,
sr interasse delle fessure,
σsr tensioni nell'armatura alle fessure,
σs tensioni effettive nell'armatura,
fy tensione di snervamento dell'armatura.
L'implementazione di IDEA StatiCa Detail del CSFM considera l'interasse medio delle fessure per impostazione predefinita durante l'analisi del campo di tensioni assistita da computer. L'interasse medio delle fessure è considerato pari a 2/3 dell'interasse massimo delle fessure (λ = 0.67), in conformità con le raccomandazioni formulate sulla base di prove a flessione e trazione (Broms 1965; Beeby 1979; Meier 1983). Si noti che i calcoli delle ampiezze delle fessure considerano un interasse massimo delle fessure (λ = 1.0) al fine di ottenere valori conservativi.
L'applicazione del TCM dipende dal rapporto di armatura, e quindi l'assegnazione di un'appropriata area di calcestruzzo reagente a trazione tra le fessure a ciascuna barra d'armatura è fondamentale. È stata sviluppata una procedura numerica automatica per definire il corrispondente rapporto di armatura efficace (ρeff = As/Ac,eff) per qualsiasi configurazione, inclusa l'armatura inclinata (Fig. 23).
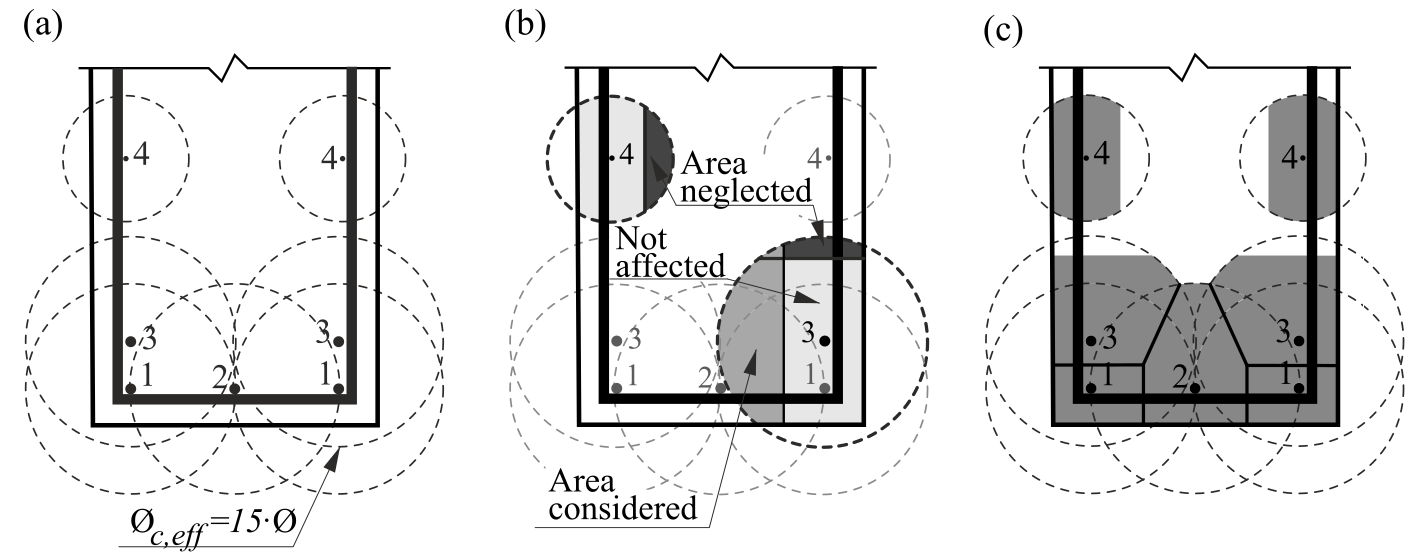
\( \textsf{\textit{\footnotesize{Fig. 23\qquad Effective area of concrete in tension for stabilized cracking: (a) maximum concrete area that can be activated;}}}\) \( \textsf{\textit{\footnotesize{(b) cover and global symmetry condition; (c) resultant effective area.}}}\)
Fessurazione non stabilizzata
Le fessure presenti in regioni con rapporti geometrici di armatura inferiori a ρcr, ovvero la quantità minima di armatura per cui l'armatura è in grado di portare il carico di fessurazione senza snervare, sono generate da azioni non meccaniche (ad es. ritiro) o dalla propagazione di fessure controllate da altra armatura. Il valore di questa armatura minima si ottiene come segue:
\[{\rho _{cr}} = \frac{{{f_{ct}}}}{{{f_y} - \left( {n - 1} \right){f_{ct}}}}\]
dove:
fy tensione di snervamento dell'armatura,
fct resistenza a trazione del calcestruzzo,
n rapporto modulare, n = Es / Ec .
Per calcestruzzo e acciaio d'armatura convenzionali, ρcr ammonta a circa lo 0,6%.
Per le staffe con rapporti di armatura inferiori a ρcr, la fessurazione è considerata non stabilizzata e l'irrigidimento a trazione è implementato mediante il Pull-Out Model (POM) descritto nella Fig. 22b. Questo modello analizza il comportamento di una singola fessura considerando nessuna interazione meccanica tra fessure separate, trascurando la deformabilità del calcestruzzo a trazione e assumendo la stessa relazione tensione di aderenza-scorrimento a gradini, rigida e perfettamente plastica, utilizzata dal TCM. Ciò consente di ottenere la distribuzione delle deformazioni dell'armatura (εs) in prossimità della fessura per qualsiasi tensione massima nell'acciaio alla fessura (σsr) direttamente dall'equilibrio. Dato che l'interasse delle fessure è sconosciuto per uno schema di fessurazione non completamente sviluppato, la deformazione media (εm) è calcolata per qualsiasi livello di carico sulla distanza tra i punti con scorrimento nullo quando la barra d'armatura raggiunge la sua resistenza a trazione (ft) alla fessura (lε,avg nella Fig. 22b), portando alle seguenti relazioni:
I modelli proposti consentono il calcolo del comportamento dell'armatura aderente, che viene infine considerato nell'analisi. Questo comportamento (incluso l'irrigidimento a trazione) per l'acciaio d'armatura europeo più comune (B500B, con ft / fy = 1,08 e εu = 5%) è illustrato nella Fig. 22c-d.
4 Verifiche strutturali secondo Eurocode
La valutazione della struttura mediante CSFM viene eseguita con due analisi distinte: una per le combinazioni di carico allo stato limite di esercizio e una per quelle allo stato limite ultimo. L'analisi di esercizio presuppone che il comportamento ultimo dell'elemento sia soddisfacente e che le condizioni di snervamento del materiale non vengano raggiunte ai livelli di carico di esercizio. Questo approccio consente l'utilizzo di modelli costitutivi semplificati (con un ramo lineare del diagramma tensione-deformazione del calcestruzzo) per l'analisi di esercizio, al fine di migliorare la stabilità numerica e la velocità di calcolo.
4.1 Modelli di materiale (EN)
Calcestruzzo - SLU
Il modello di calcestruzzo implementato nel CSFM si basa sulle leggi costitutive uniassiali a compressione prescritte dalla EN 1992-1-1 per la progettazione delle sezioni trasversali, che dipendono esclusivamente dalla resistenza a compressione. Il diagramma parabola-rettangolo specificato nella EN 1992-1-1 Cl. 3.1.7 (1) (Fig. 24a) è utilizzato per impostazione predefinita nel CSFM, ma i progettisti possono anche scegliere una relazione elastica-perfettamente plastica più semplificata secondo la EN 1992-1-1 Cl. 3.1.7 (2) (Fig. 24b). La resistenza a trazione è trascurata, come avviene nella progettazione classica del calcestruzzo armato.
\[ \textsf{\textit{\footnotesize{Fig. 24\qquad I diagrammi tensione-deformazione del calcestruzzo per SLU: a) diagramma parabola-rettangolo; b) diagramma bilineare.}}}\]
L'implementazione del CSFM in IDEA StatiCa Detail non considera un criterio di rottura esplicito in termini di deformazioni per il calcestruzzo compresso (ovvero, dopo il raggiungimento della tensione di picco, considera un ramo plastico con εcu2 (εcu3) pari al 5%, mentre la EN 1992-1-1 assume una deformazione ultima inferiore allo 0,35%). Questa semplificazione non consente di verificare la capacità deformativa delle strutture che collassano per compressione. Tuttavia, la loro capacità ultima fcd secondo la EN 1992-1-1 3.1.3 è correttamente prevista quando, in aggiunta al fattore del calcestruzzo fessurato (kc2 definito in (Fig. 25)), l'aumento della fragilità del calcestruzzo all'aumentare della resistenza è considerato tramite il fattore di riduzione \(\eta_{fc}\) definito nel fib Model Code 2010 come segue:
\[f_{cd}={\alpha_{cc}} \cdot \frac{f_{ck,red}}{γ_c} = {\alpha_{cc}} \cdot \frac{k_c \cdot f_{ck}}{γ_c} = {\alpha_{cc}} \cdot \frac{\eta _{fc} \cdot k_{c2} \cdot f_{ck}}{γ_c}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f_{ck}}}}} \right)^{\frac{1}{3}}} \le 1\]
dove:
αcc è il coefficiente che tiene conto degli effetti a lungo termine sulla resistenza a compressione e degli effetti sfavorevoli derivanti dalle modalità di applicazione del carico. È definito secondo la EN 1992-1-1 Cl. 3.1.6 (1). Il valore predefinito è 1,0.
kc è il fattore di riduzione globale della resistenza a compressione
kc2 è il fattore di riduzione dovuto alla presenza di fessure trasversali
fck è la resistenza caratteristica cilindrica del calcestruzzo (in MPa per la definizione di \( \eta_{fc} \)).
\[ \textsf{\textit{\footnotesize{Fig. 25\qquad La legge di ammorbidimento a compressione.}}}\]
Calcestruzzo - SLE
L'analisi in esercizio contiene alcune semplificazioni dei modelli costitutivi utilizzati per l'analisi allo stato limite ultimo. Il ramo plastico del diagramma tensione-deformazione del calcestruzzo compresso è trascurato, mentre il ramo elastico è lineare e illimitato. La legge di ammorbidimento a compressione non è considerata. Queste semplificazioni migliorano la stabilità numerica e la velocità di calcolo e non riducono la generalità della soluzione, purché i limiti di tensione dei materiali in esercizio siano chiaramente al di sotto dei loro punti di snervamento (come richiesto dall'Eurocode). Pertanto, i modelli semplificati utilizzati per le verifiche in esercizio sono validi solo se tutti i requisiti di verifica sono soddisfatti.
\[ \textsf{\textit{\footnotesize{Fig. 26\qquad Diagrammi tensione-deformazione del calcestruzzo implementati per l'analisi in esercizio: verifiche a breve e lungo termine.}}}\]
Effetti a lungo termine
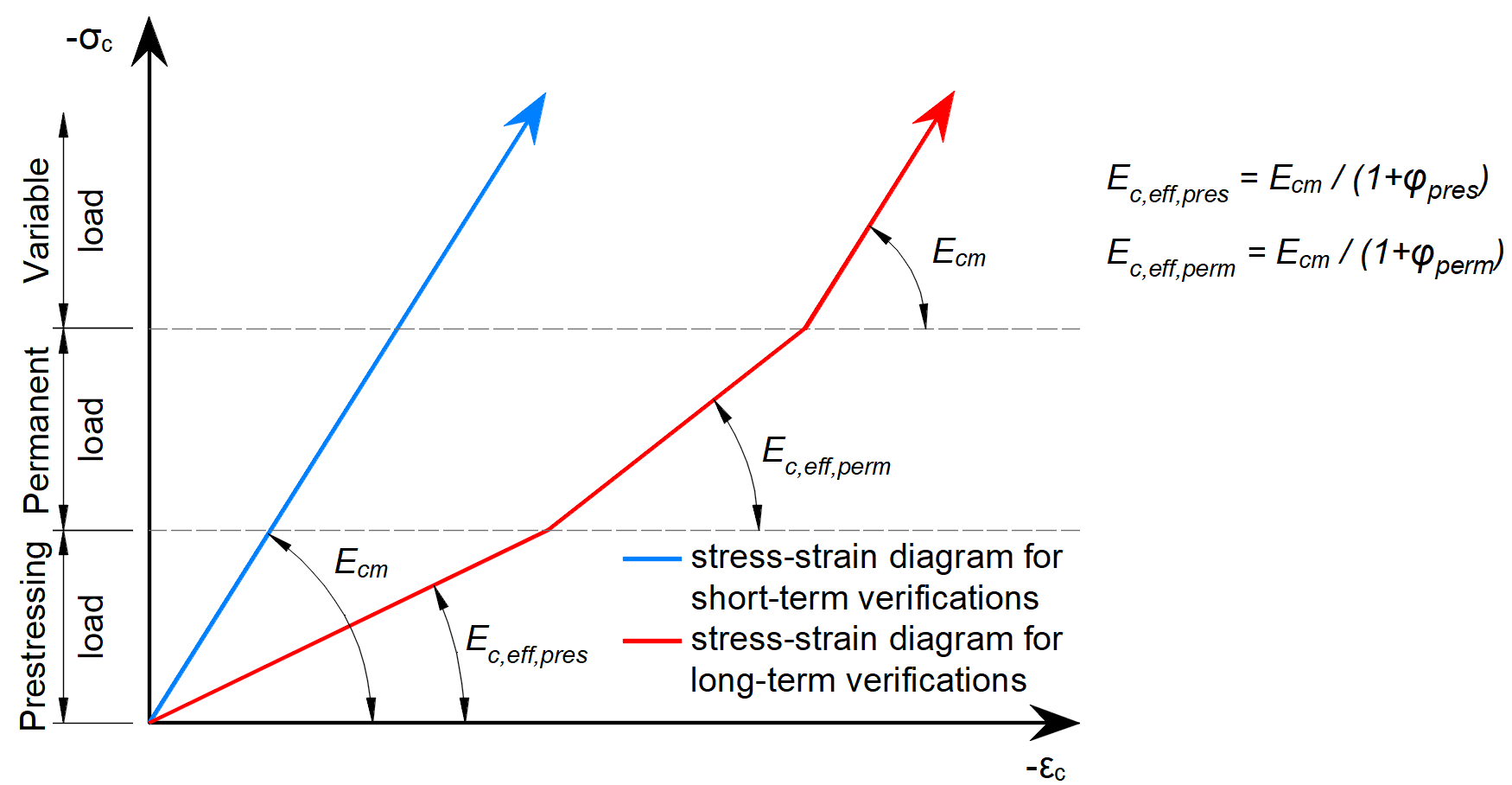
Nell'analisi in esercizio, gli effetti a lungo termine del calcestruzzo sono considerati utilizzando un coefficiente di viscosità efficace infinito (\(\varphi\), assunto per impostazione predefinita pari a 2,5) che modifica il modulo di elasticità secante del calcestruzzo (Ecm) secondo la EN 1992-1-1, sezione 3.1.4 (3) risp. 7.4.3 (5) come segue:
\[E_{c,eff} = \frac{E_{cm}}{1+\varphi}\]
Considerando gli effetti a lungo termine, un passo di carico con tutti i carichi permanenti viene prima calcolato tenendo conto del coefficiente di viscosità (ovvero utilizzando il modulo di elasticità efficace del calcestruzzo, Ec,eff), quindi i carichi aggiuntivi vengono calcolati senza il coefficiente di viscosità (ovvero utilizzando Ecm). Inoltre, per eseguire le verifiche a breve termine, viene effettuato un ulteriore calcolo in cui tutti i carichi sono calcolati senza il coefficiente di viscosità. Entrambi i calcoli per le verifiche a breve e lungo termine sono illustrati in Fig. 26.
I coefficienti di viscosità sono definiti dall'utente nelle proprietà del materiale e devono essere calcolati secondo la EN 1992-1-1, Fig 3.1.
Armatura
Per impostazione predefinita, si considera il diagramma tensione-deformazione bilineare idealizzato per le barre di armatura nude definito nella EN 1992-1-1, sezione 3.2.7 (Fig. 27). La definizione di questo diagramma richiede solo la conoscenza delle proprietà di base dell'armatura durante la fase di progettazione (resistenza e classe di duttilità). Quando note, è possibile considerare la relazione tensione-deformazione reale dell'armatura (laminata a caldo, trafilata a freddo, temprata e autotemperata, …). Il diagramma tensione-deformazione dell'armatura può essere definito dall'utente, ma in questo caso non è possibile assumere l'effetto di irrigidimento a trazione (non è possibile calcolare l'ampiezza delle fessure). L'utilizzo del diagramma tensione-deformazione con ramo superiore orizzontale non consente la verifica della durabilità strutturale. Pertanto, è necessaria la verifica manuale dei requisiti standard di duttilità.
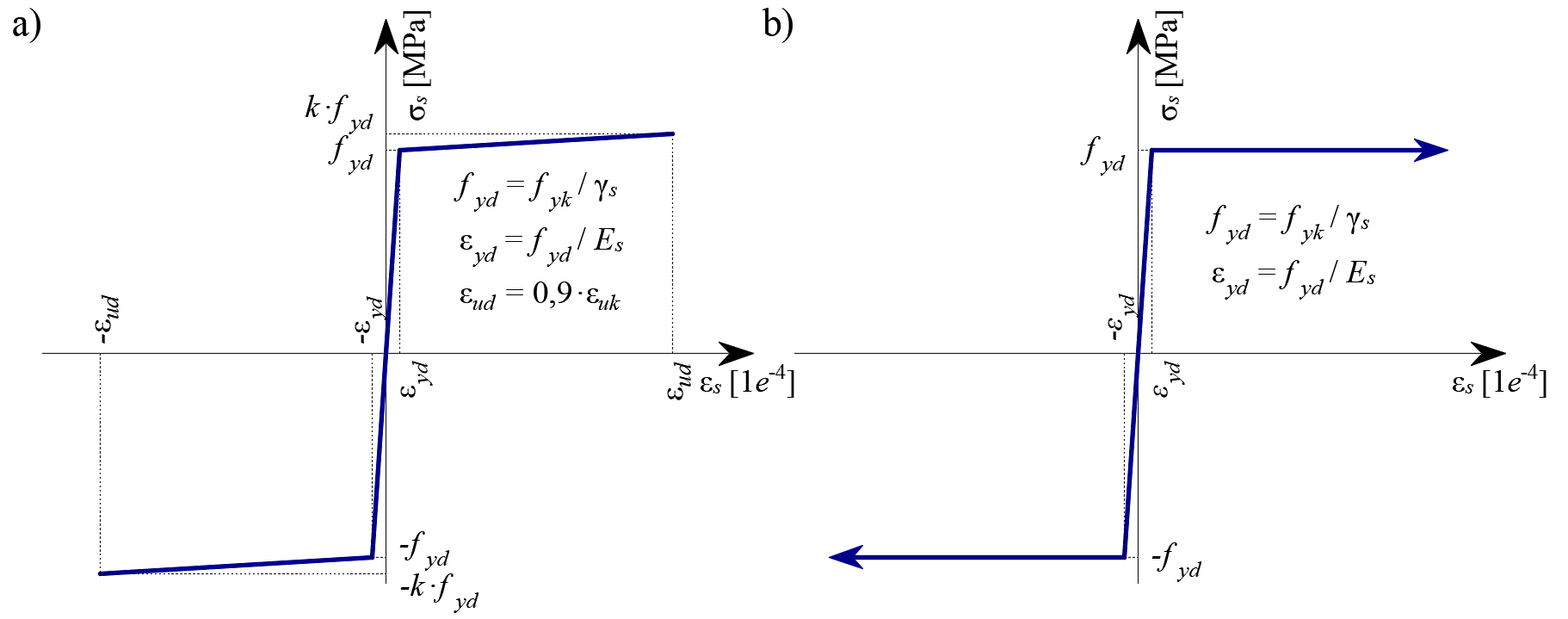
\( \textsf{\textit{\footnotesize{Fig. 27 \qquad Diagramma tensione-deformazione dell'armatura: a) diagramma bilineare con ramo superiore inclinato; b) diagramma bilineare}}}\) \( \textsf{\textit{\footnotesize{con ramo superiore orizzontale.}}}\)
L'irrigidimento a trazione (Fig. 28) è considerato automaticamente modificando la relazione tensione-deformazione di input della barra di armatura nuda al fine di cogliere la rigidezza media delle barre inglobate nel calcestruzzo (εm).
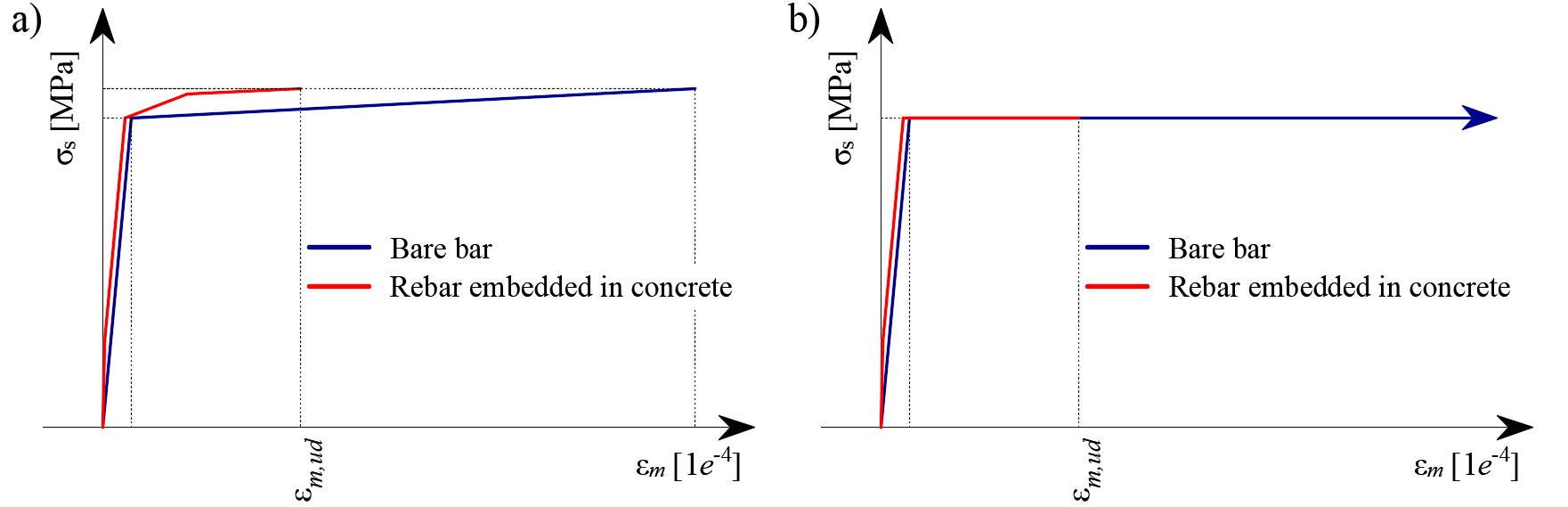
\[ \textsf{\textit{\footnotesize{Fig. 28\qquad Schema dell'irrigidimento a trazione.}}}\]
4.2 Fattori di sicurezza
Il Metodo del Campo di Tensioni Compatibile è conforme ai moderni codici di progettazione. Poiché i modelli di calcolo utilizzano solo proprietà dei materiali standard, il formato dei fattori di sicurezza parziali prescritto nei codici di progettazione può essere applicato senza alcun adattamento. In questo modo, i carichi di input vengono amplificati e le proprietà caratteristiche dei materiali vengono ridotte utilizzando i rispettivi coefficienti di sicurezza prescritti nei codici di progettazione, esattamente come nell'analisi convenzionale del calcestruzzo. I valori dei fattori di sicurezza dei materiali prescritti nella EN 1992-1-1 cap. 2.4.2.4 sono impostati per default, ma l'utente può modificare i fattori di sicurezza nelle impostazioni del Codice e di calcolo (Fig. 29).

\[ \textsf{\textit{\footnotesize{Fig. 29\qquad The setting of material safety factors in Idea StatiCa Detail.}}}\]
I fattori di sicurezza dei carichi devono essere definiti dall'utente nelle Regole di combinazione per ogni combinazione non lineare di casi di carico (Fig. 30). Per tutti i modelli implementati in Idea StatiCa Detail, i fattori di sicurezza parziali sono già predefiniti.
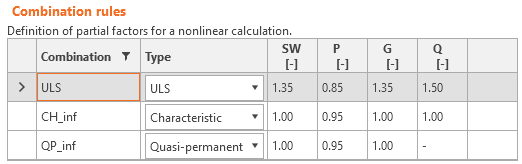
\[ \textsf{\textit{\footnotesize{Fig. 30\qquad The setting of load partial factors in Idea StatiCa Detail.}}}\]
Utilizzando combinazioni appropriate di fattori di sicurezza parziali definiti dall'utente, è possibile eseguire calcoli con il CSFM anche mediante il metodo del fattore di resistenza globale (Navrátil, et al. 2017), ma questo approccio è raramente utilizzato nella pratica progettuale. Alcune linee guida raccomandano l'uso del metodo del fattore di resistenza globale per l'analisi non lineare. Tuttavia, nelle analisi non lineari semplificate (come il CSFM), che richiedono solo le proprietà dei materiali utilizzate nei calcoli manuali convenzionali, è ancora più auspicabile utilizzare il formato dei fattori di sicurezza parziali.
4.3 Analisi allo stato limite ultimo
Le diverse verifiche richieste dalla EN 1992-1-1 sono valutate sulla base dei risultati diretti forniti dal modello. Le verifiche allo SLU sono eseguite per la resistenza del calcestruzzo, la resistenza dell'armatura e l'ancoraggio (tensioni tangenziali di aderenza).
La resistenza del calcestruzzo a compressione è valutata come il rapporto tra la massima tensione principale di compressione σc = σc2 ottenuta dall'analisi FE e il valore limite σc,lim = fcd.
La resistenza dell'armatura è valutata sia a trazione che a compressione come il rapporto tra la tensione nell'armatura alle fessure σsr e il valore limite specificato σs,lim:
\(σ_{s,lim} = \frac{k \cdot f_{yk}}{γ_s}\qquad\qquad\textsf{\small{for bilinear diagram with inclined top branch}}\)
\(σ_{s,lim} = \frac{f_{yk}}{γ_s}\qquad\qquad\,\,\,\,\textsf{\small{for bilinear diagram with horizontal top branch}}\)
dove:
fyk resistenza allo snervamento dell'armatura secondo EN 1992-1-1 Cl. 3.2.3,
k il rapporto tra la resistenza a trazione ftk e la tensione di snervamento,
\(k = \frac{f_{tk}}{f_{yk}}\)
γs è il coefficiente parziale di sicurezza per l'armatura
La tensione tangenziale di aderenza è valutata indipendentemente come il rapporto tra la tensione di aderenza τb calcolata dall'analisi FE e la resistenza ultima di aderenza fbd, secondo EN 1992-1-1 cap. 8.4.2:
\[\frac{τ_{b}}{f_{bd}}\]
\[f_{bd} = 2.25 \cdot η_1\cdot η_2\cdot f_{ctd}\]
dove:
fctd è il valore di progetto della resistenza a trazione del calcestruzzo secondo EN 1992-1-1 Cl. 3.1.6 (2). A causa della crescente fragilità dei calcestruzzi di resistenza più elevata, fctk,0.05 è limitato al valore per C60/75 secondo EN 1992-1-1 Cl. 8.4.2 (2)
η1 è un coefficiente relativo alla qualità delle condizioni di aderenza e alla posizione della barra durante il getto (Fig. 31).
η1 = 1.0 quando si ottengono condizioni di aderenza 'buone' e
η1 = 0.7 per tutti gli altri casi e per le barre in elementi strutturali realizzati con casseforme scorrevoli, a meno che non si possa dimostrare l'esistenza di condizioni di aderenza 'buone'
η2 è relativo al diametro della barra:
η2 = 1.0 per Ø ≤ 32 mm
η2 = (132 - Ø)/100 per Ø > 32 mm
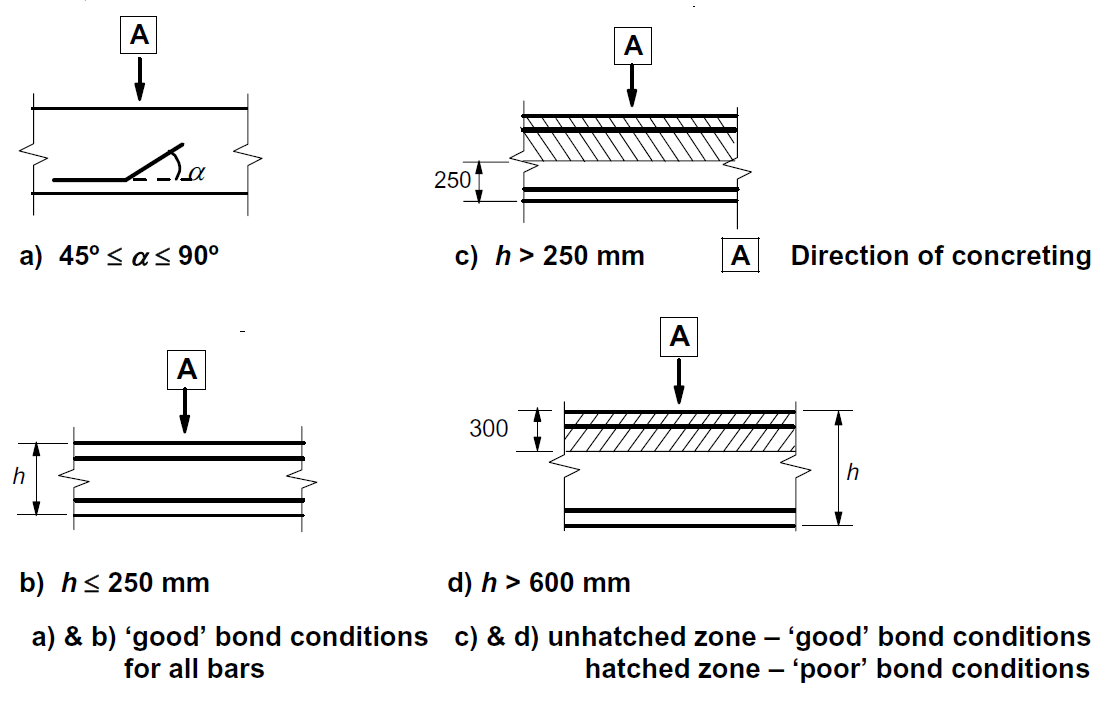
\[ \textsf{\textit{\footnotesize{Fig. 31\qquad EN 1992-1-1 Figure 8.2 - Description of bond conditions.}}}\]
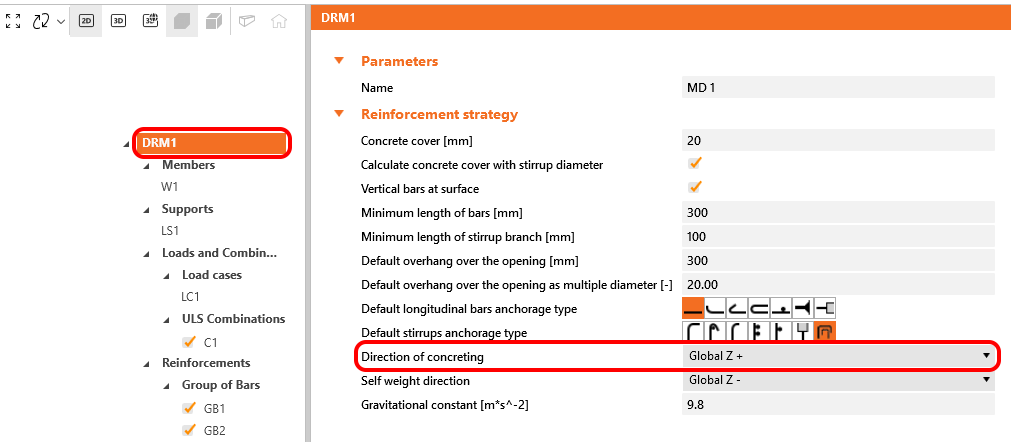
In IDEA StatiCa Detail le condizioni di aderenza sono prese in considerazione secondo la Fig. 31 c) e d). La direzione del getto può essere impostata nell'applicazione per ciascun elemento del progetto come segue.
Queste verifiche sono eseguite rispetto ai valori limite appropriati per le rispettive parti della struttura (ovvero, nonostante si utilizzi un'unica classe sia per il calcestruzzo che per il materiale dell'armatura, i diagrammi tensione-deformazione finali differiranno in ciascuna parte della struttura a causa degli effetti di irrigidimento a trazione e di ammorbidimento a compressione).
È disponibile anche un'opzione per modellare barre lisce. Ulteriori informazioni sono disponibili qui: Barre lisce in Detail
Forza totale Ftot e Forza limite Flim
La forza totale Ftot è un risultato dell'analisi agli elementi finiti e può essere definita in due modi.
\[F_{tot}=A_{s}\cdot \sigma_{s}\]
dove As è l'area della barra di armatura e σs è la tensione nella barra.
Oppure come somma della forza di ancoraggio Fa e della forza di aderenza Fbond.
\[F_{tot}=F_{a}+F_{bond}\]
dove Fa è la forza effettiva nella molla di ancoraggio e Fbond è la forza di aderenza che può essere ottenuta integrando la tensione tangenziale di aderenza τb lungo la lunghezza della barra di armatura l.
\[F_{bond}=C_{s} \cdot \int_{0}^{l}\tau_{b}\left( x \right)dx\]
Cs è la circonferenza della barra di armatura.
La forza limite Flim è la forza massima nell'elemento della barra considerando la resistenza ultima della barra e anche le condizioni di ancoraggio (aderenza tra calcestruzzo e armatura e ganci, anelli di ancoraggio, ecc.).
\[F_{lim}=min\left( F_{lim,bond}+F_{au},F_{u} \right)\]
\[F_{u}=k\cdot f_{yd}\cdot A_{s}\]
\[F_{au}=\beta\cdot k\cdot f_{yd}\cdot A_{s}\]
\[F_{lim,bond}=C_{s}\cdot l \cdot f_{bd}\]
dove Cs è la circonferenza della barra di armatura e l è la lunghezza dall'inizio della barra al punto di interesse.
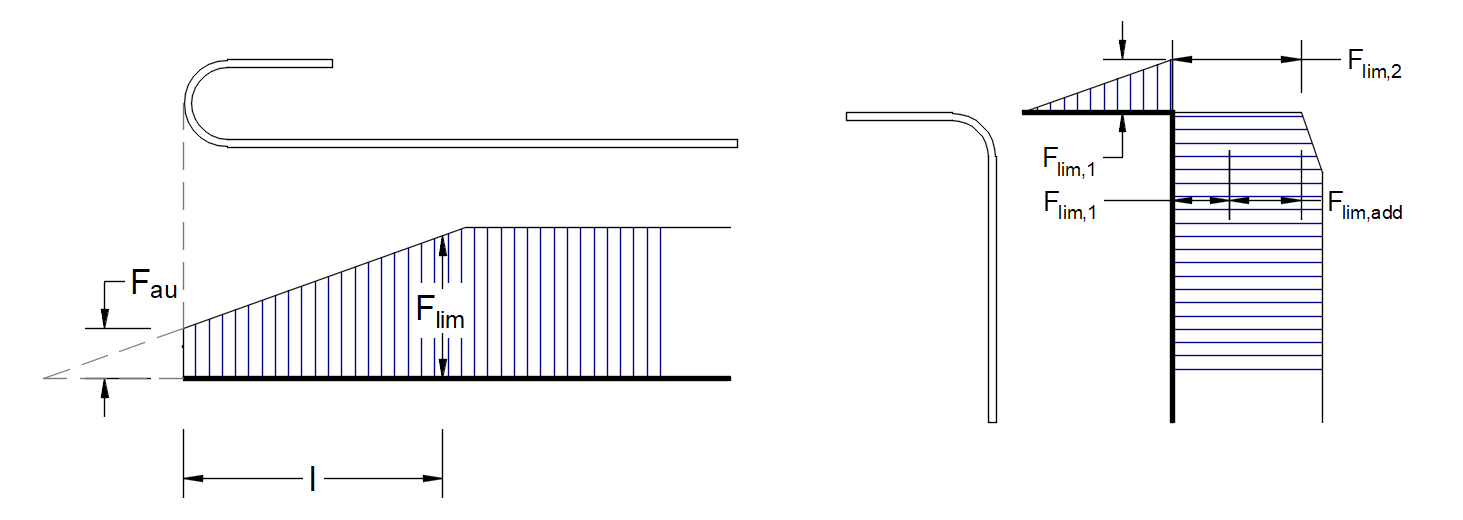
\[ \textsf{\textit{\footnotesize{Fig. 32\qquad Definition of the limit force Flim}}}\]
\[F_{lim,2}=F_{lim,1}+F_{lim,add}\]
dove Flim,add è la forza aggiuntiva calcolata in funzione dell'ampiezza dell'angolo tra elementi adiacenti. Flim,2 deve essere sempre inferiore a Fu.
I tipi di ancoraggio disponibili nel CSFM comprendono: barra diritta (ovvero senza riduzione dell'estremità di ancoraggio), piega, gancio, anello, barra trasversale saldata, aderenza perfetta e barra continua. Tutti questi tipi, insieme ai rispettivi coefficienti di ancoraggio β, sono mostrati nella Fig. 32 per l'armatura longitudinale e nella Fig. 33 per le staffe. I valori dei coefficienti di ancoraggio adottati sono conformi alla EN 1992-1-1 sezione 8.4.4 Tab. 8.2. È opportuno notare che, nonostante le diverse opzioni disponibili, il CSFM distingue tre tipi di estremità di ancoraggio: (i) nessuna riduzione della lunghezza di ancoraggio, (ii) una riduzione del 30% della lunghezza di ancoraggio nel caso di ancoraggio normalizzato e (iii) aderenza perfetta.

\[ \textsf{\textit{\footnotesize{Fig. 33\qquad Available anchorage types and respective anchorage coefficients for longitudinal reinforcing bars in the CSFM:}}}\]
\[ \textsf{\textit{\footnotesize{(a) straight bar; (b) bend; (c) hook; (d) loop; (e) welded transverse bar; (f) perfect bond; (g) continuous bar.}}}\]

\[ \textsf{\textit{\footnotesize{Fig. 33\qquad Available anchorage types and respective anchorage coefficients for stirrups.}}}\]
\[ \textsf{\textit{\footnotesize{Closed stirrups: (a) hook; (b) bend; (c) overlap. Open stirrups: (d) hook; (e) continuous bar.}}}\]
Al fine di conformarsi alla EN 1992-1-1, nella calcolo deve essere utilizzata la molla di ancoraggio; la molla di ancoraggio è modificata dal coefficiente β, pertanto l'utente deve utilizzare uno dei tipi di ancoraggio disponibili quando definisce le condizioni di inizio e fine dell'armatura.
4.4 Aree parzialmente caricate (PLA)
Nella progettazione di strutture in calcestruzzo, si incontrano due grandi gruppi di aree parzialmente caricate (PLA) - il primo comprende gli appoggi, mentre il secondo riguarda le zone di ancoraggio. Secondo le norme attualmente vigenti per la progettazione di strutture in calcestruzzo armato EN 1992-1-1 cap. 6.7 (Fig. 34), per le aree parzialmente caricate devono essere considerati lo schiacciamento locale del calcestruzzo e le forze di trazione trasversale. Per un carico uniformemente distribuito su un'area, Ac0, la capacità a compressione del calcestruzzo può essere aumentata fino a tre volte in funzione dell'area di distribuzione di progetto Ac1.
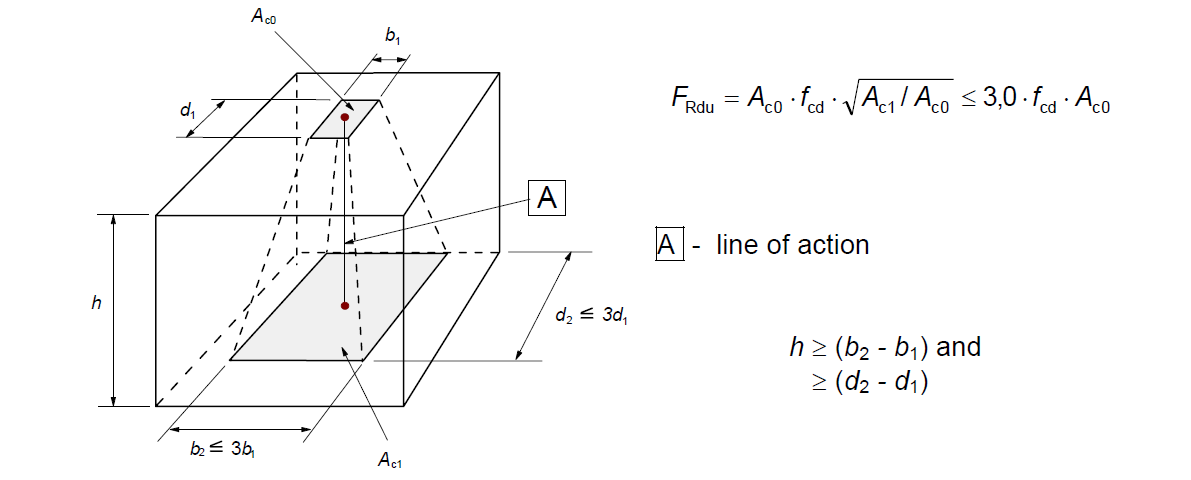
\[ \textsf{\textit{\footnotesize{Fig. 34\qquad Partially loaded areas according to EN 1992-1-1.}}}\]
L'area parzialmente caricata deve essere sufficientemente armata con armatura trasversale progettata per trasmettere le forze di splitting che si sviluppano nella zona. Per la progettazione dell'armatura trasversale nelle aree parzialmente caricate, viene utilizzato il metodo Puntone-e-tirante secondo l'Eurocodice. Senza la necessaria armatura trasversale, non è possibile considerare l'aumento della capacità a compressione del calcestruzzo.
Aree parzialmente caricate nel CSFM
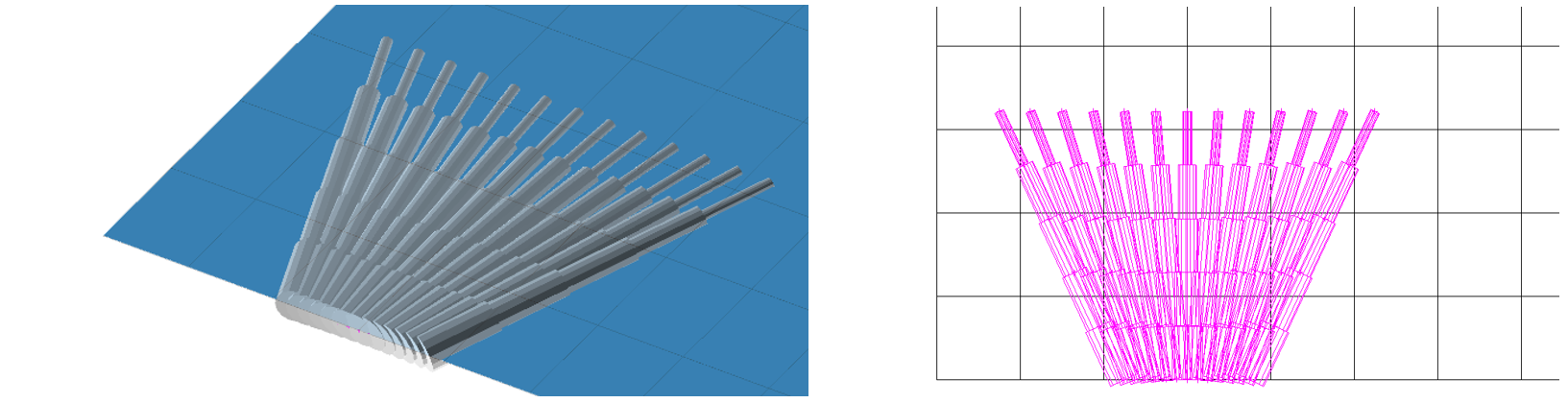
\[ \textsf{\textit{\footnotesize{Fig. 35\qquad Fictitious struts with concrete finite element mesh.}}}\]
Utilizzando il CSFM, è possibile progettare e verificare strutture in calcestruzzo armato includendo l'influenza dell'aumento della resistenza a compressione del calcestruzzo nelle aree parzialmente caricate. Poiché il CSFM è un modello a parete (2D) e le aree parzialmente caricate costituiscono un problema spaziale (3D), è stato necessario trovare una soluzione che combinasse questi due diversi tipi di problemi (Fig. 35). Se la funzione "aree parzialmente caricate" è attivata, la geometria del cono ammissibile viene creata secondo l'Eurocodice (Fig. 34). Tutte le interferenze geometriche vengono risolte completamente in 3D per la geometria dell'elemento in calcestruzzo specificata e le dimensioni di ciascuna PLA. Successivamente, viene creato un modello di calcolo dell'area parzialmente caricata.
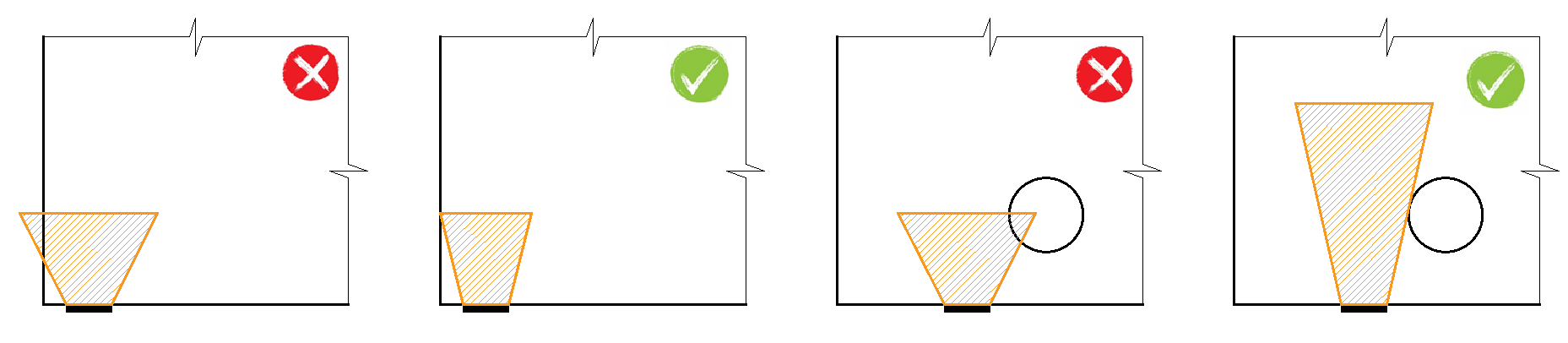
\[ \textsf{\textit{\footnotesize{Fig. 36\qquad Allowable cone geometries.}}}\]
La modifica del modello di materiale si è rivelata un approccio inadeguato, principalmente perché la mappatura delle proprietà sulla rete di elementi finiti risulta problematica. È stato stabilito che un approccio indipendente dalla rete di elementi finiti rappresenta una soluzione più appropriata. Per la geometria del cono di compressione nota vengono creati puntoni fittizi perfettamente coerenti (Fig. 35 e Fig. 37). Questi puntoni hanno proprietà di materiale identiche al calcestruzzo utilizzato nel modello, incluso il diagramma tensione-deformazione. La forma del cono determina la direzione dei puntoni, che distribuisce progressivamente il carico dalla PLA all'area di distribuzione di progetto. La densità areale dei puntoni fittizi è variabile in ciascuna parte del cono e aggiunge un'area fittizia di calcestruzzo nella direzione del carico. Al livello dell'area caricata (Ac0), viene aggiunta un'area fittizia di calcestruzzo secondo il rapporto \(\sqrt{A_{c0} \cdot A_{c1}} - A_{real}\) (dove Areal è l'area dell'appoggio assunta nel modello di calcolo 2D), e tale area decresce linearmente a zero verso l'area di distribuzione di progetto (Ac1). Questa soluzione garantisce che la tensione di compressione nel calcestruzzo sia costante sull'intero volume del cono.
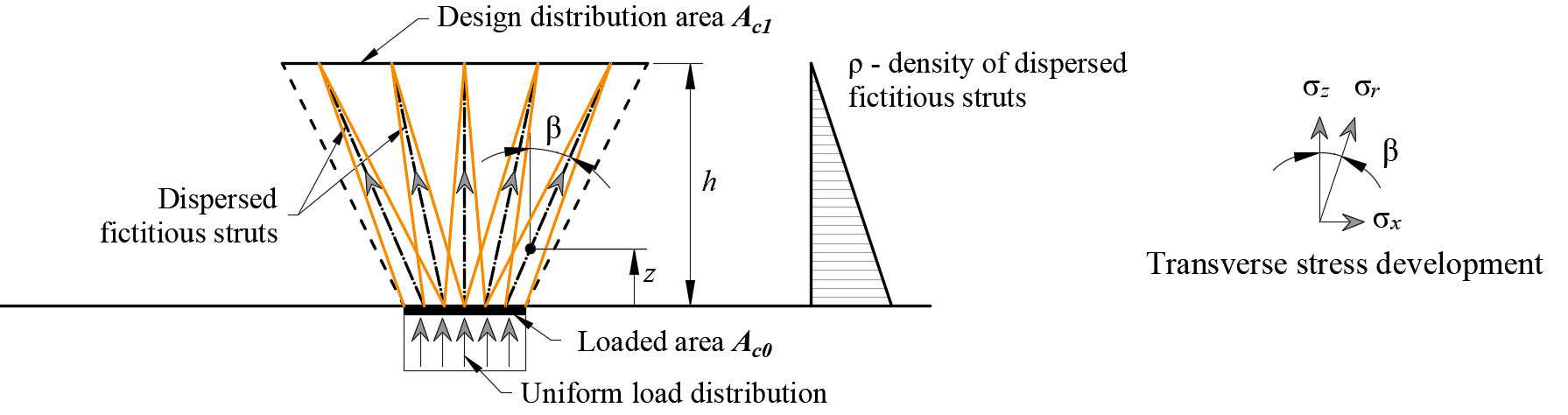
\[\rho \left( {\beta ,z} \right) = \left( {\sqrt {\frac{A_{c1}}{A_{c0}}} - \frac{A_{real}}{A_{c0}}} \right)\,\cdot\,\left( {1 - \frac{z}{h}} \right)\,\cdot\,\frac{1}{{\cos \beta }}\]
\[ \textsf{\textit{\footnotesize{Fig. 37\qquad Fictitious struts in the computational model}}}\]
La resistenza dell'area parzialmente caricata viene aumentata in funzione del rapporto tra l'area di distribuzione di progetto e l'area caricata, come stabilito dalla EN 1992-1-1 (6.7). È opportuno ricordare che si tratta di un modello di progetto che non può descrivere con precisione lo stato tensionale in un'area parzialmente caricata, il cui andamento reale è molto più complesso. Tuttavia, questa soluzione consente la corretta distribuzione del carico sull'intero modello, rispettando al contempo la maggiore capacità portante dell'area parzialmente caricata. Inoltre, introduce correttamente le tensioni trasversali in questa zona.
Nell'utilizzo della funzione delle aree parzialmente caricate per simulare l'aumento della capacità a compressione del calcestruzzo, è necessario eseguire separatamente la verifica normativa secondo EN 1992-1-1, sezione 6.7 (2). Le forze di trazione trasversale (forze di splitting) trasferite dall'armatura vengono verificate automaticamente.
4.5 Analisi allo stato limite di esercizio
Le verifiche allo SLE vengono eseguite per la limitazione delle tensioni, l'ampiezza delle fessure e i limiti di deformazione. Le tensioni vengono verificate negli elementi in calcestruzzo e nell'armatura secondo EN 1992-1-1 in modo analogo a quanto previsto per lo SLU.
Limitazione delle tensioni
La tensione di compressione nel calcestruzzo deve essere limitata al fine di evitare fessure longitudinali. Secondo EN 1992-1-1 cap. 7.2 (2), possono verificarsi fessure longitudinali se il livello di tensione sotto la combinazione caratteristica dei carichi supera il valore k1fck. La tensione di compressione nel calcestruzzo è valutata come rapporto tra la massima tensione principale di compressione σc = σc2 ottenuta dall'analisi FE per gli stati limite di esercizio e il valore limite σc,lim. Pertanto:
\[\frac{σ_{c}}{σ_{c,lim}}\]
\[σ_{c,lim} = k_1\cdot f_{ck}\]
dove:
fck resistenza caratteristica cilindrica del calcestruzzo,
k1 =0.6.
Se la tensione nel calcestruzzo sotto i carichi quasi-permanenti è inferiore a k2fck secondo EN 1992-1-1 Cl. 7.2(3), si può assumere una viscosità lineare. Se la tensione nel calcestruzzo supera k2fck, si dovrebbe considerare la viscosità non lineare (vedere EN 1992-1-1 Cl. 3.1.4). In IDEA StatiCa Detail è possibile assumere solo la viscosità lineare secondo EN 1992-1-1 Cl. 3.1.4 (3) (vedere Modelli di materiale (EN)).
Si può assumere che fessurazioni o deformazioni inaccettabili siano evitate se, sotto la combinazione caratteristica dei carichi, la tensione di trazione nell'armatura non supera k3fyk (EN 1992-1-1 cap. 7.2 (5)). La resistenza dell'armatura è valutata come rapporto tra la tensione nell'armatura alle fessure σs = σsr e il valore limite specificato σs,lim:
\[\frac{σ_{s}}{σ_{s,lim}}\]
\[σ_{s,lim} = k_3\cdot f_{yk}\]
dove:
fyk resistenza allo snervamento dell'armatura,
k3 =0.8.
Deformazione
Le deformazioni possono essere valutate solo per pareti o travi isostatiche (staticamente determinate) o iperstatiche (staticamente indeterminate). In questi casi, viene considerato il valore assoluto delle deformazioni (rispetto allo stato iniziale prima del carico) e il valore massimo ammissibile delle deformazioni deve essere impostato dall'utente. Le deformazioni alle estremità rifilate non possono essere verificate poiché si tratta essenzialmente di strutture instabili in cui l'equilibrio è soddisfatto aggiungendo forze alle estremità, e quindi le deformazioni non sono realistiche. La deformazione a breve termine uz,st o a lungo termine uz,lt può essere calcolata e verificata rispetto ai valori limite definiti dall'utente:
\[\frac{u_ z}{u_{z,lim}}\]
dove:
uz deformazione a breve o lungo termine calcolata dall'analisi FE,
uz,lim valore limite della deformazione definito dall'utente.
Ampiezza delle fessure
Le ampiezze e le orientazioni delle fessure sono calcolate solo per gli effetti a lungo termine (utilizzando Ec,eff) per le combinazioni in cui la valutazione dell'ampiezza delle fessure è abilitata. Le verifiche basate sui valori limite specificati dall'utente in conformità con l'Eurocode sono presentate come segue:
\[\frac{w}{w_{lim}}\]
dove:
w ampiezza della fessura calcolata dall'analisi FE,
wlim valore limite dell'ampiezza della fessura definito dall'utente.
Esistono due metodi per il calcolo delle ampiezze delle fessure (fessurazione stabilizzata e non stabilizzata). Nel caso generale (fessurazione stabilizzata), l'ampiezza della fessura è calcolata integrando le deformazioni sugli elementi 1D delle barre di armatura. La direzione della fessura viene quindi calcolata dai tre punti di integrazione più vicini (dal centro del dato elemento finito 1D dell'armatura) degli elementi 2D in calcestruzzo. Sebbene questo approccio al calcolo delle direzioni delle fessure non corrisponda alla posizione reale delle fessure, fornisce comunque valori rappresentativi che portano a risultati di ampiezza delle fessure confrontabili con i valori di ampiezza delle fessure richiesti dalla normativa nella posizione della barra di armatura.
5 Verifiche strutturali secondo ACI 318-19
La valutazione della struttura mediante CSFM viene eseguita con due analisi distinte: una per le combinazioni di carico di esercizio e una per quelle di resistenza. L'analisi di esercizio presuppone che il comportamento sotto i carichi amplificati sia soddisfacente e che le condizioni di snervamento del materiale non vengano raggiunte ai livelli di carico di esercizio. Questo approccio consente l'utilizzo di modelli costitutivi semplificati (con un ramo lineare del diagramma tensione-deformazione del calcestruzzo) per l'analisi di esercizio, al fine di migliorare la stabilità numerica e la velocità di calcolo.
Il CSFM è conforme ad ACI 318-19, capitolo 6.8.1.1. Al fine di soddisfare i requisiti della sezione 6.8.1.2 di ACI 318-19, sono state condotte numerose campagne di verifica sperimentale presso diverse università. I singoli articoli che riassumono i risultati delle verifiche e delle validazioni sono disponibili al seguente link.
5.1 Modelli di materiale (ACI)
Calcestruzzo - Resistenza
Il modello di calcestruzzo implementato per i calcoli di resistenza nel CSFM è basato sulla curva tensione-deformazione parabolico-plastica per il calcestruzzo, derivata dalla curva parabolica tensione-deformazione della Portland Cement Association descritta nelle Note PCA sui requisiti del codice edilizio ACI 318-99 per il calcestruzzo strutturale, Figura 6-8. La resistenza a trazione è trascurata, come avviene nel progetto classico del calcestruzzo armato.
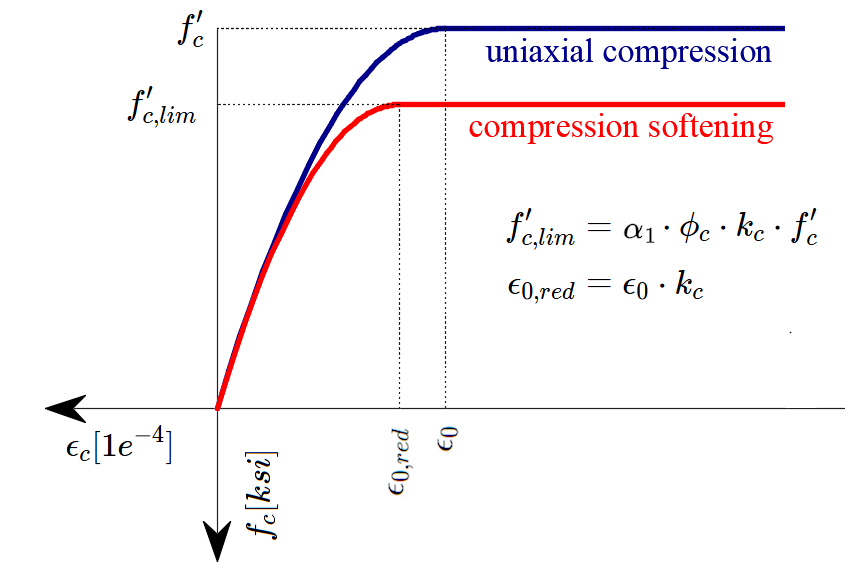
\[ \textsf{\textit{\footnotesize{Fig. 38\qquad The stress-strain diagram of concrete for Strength analysis}}}\]
L'implementazione del CSFM in IDEA StatiCa Detail non considera un criterio di rottura esplicito in termini di deformazioni per il calcestruzzo compresso (ovvero, dopo il raggiungimento della tensione di picco, considera un ramo plastico con εc0 con valore massimo del 5%, mentre ACI 318-19 Cl. 22.2.2.1 assume una deformazione ultima inferiore allo 0,3%). Questa semplificazione non consente di verificare la capacità deformativa delle strutture che collassano per compressione. Tuttavia, la resistenza è correttamente prevista quando, in aggiunta al fattore del calcestruzzo fessurato (kc2 definito in (Fig. 39)), l'aumento della fragilità del calcestruzzo all'aumentare della resistenza è considerato tramite il fattore di riduzione \(\eta_{fc}\) definito nel fib Model Code 2010 come segue:
\[f'_{c,lim}=\alpha_{1}\cdot\phi_{c}\cdot k_{c}\cdot f'_{c}\]
\[k_{c}=\eta_{fc}\cdot k_{c2}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f'_{c}}}}} \right)^{\frac{1}{3}}} \le 1\]
dove:
α1 è il fattore di riduzione della resistenza a compressione del calcestruzzo definito in ACI 318-19 Cl. 22.2.2.4.1. Quando si utilizza un diagramma tensione-deformazione a parabola-rettangolo, è necessario ridurre la tensione massima di compressione di questo fattore. Ciò media la distribuzione delle tensioni nella zona compressa in modo tale che la resistenza a compressione risultante sia inferiore o uguale alla resistenza a compressione calcolata utilizzando un diagramma tensione-deformazione con ramo plastico decrescente.
Φc è il fattore di riduzione della resistenza per il calcestruzzo. Il valore predefinito è impostato secondo ACI 318-19 Tabella 24.2.1 (b)(f).
kc2 è il fattore di riduzione dovuto alla presenza di fessurazione trasversale.
f'c è la resistenza cilindrica del calcestruzzo (in MPa per la definizione di \( \eta_{fc} \)).
\[ \textsf{\textit{\footnotesize{Fig. 39\qquad The compression softening law.}}}\]
kc2 è un fattore di riduzione basato sulle stesse ipotesi del coefficiente della zona nodale βn riportato in ACI 318-19 Tabella 23.9.2, con la differenza che nel CSFM la presenza di una tensione principale di trazione perpendicolare alla tensione principale di compressione è verificata per ciascun elemento finito (non solo per i nodi del modello Puntone e tirante).
Calcestruzzo – Stato limite di esercizio
L'analisi allo stato limite di esercizio contiene alcune semplificazioni dei modelli costitutivi utilizzati per l'analisi di resistenza. Il ramo plastico della curva tensione-deformazione del calcestruzzo compresso è trascurato, mentre il ramo elastico è lineare e illimitato. La legge di ammorbidimento a compressione non è considerata. Queste semplificazioni migliorano la stabilità numerica e la velocità di calcolo e non riducono la generalità della soluzione, purché i limiti di tensione del materiale risultante allo stato limite di esercizio siano chiaramente al di sotto dei punti di snervamento (come richiesto dall'ACI). Pertanto, i modelli semplificati utilizzati per lo stato limite di esercizio sono validi solo se tutti i requisiti di verifica sono soddisfatti.
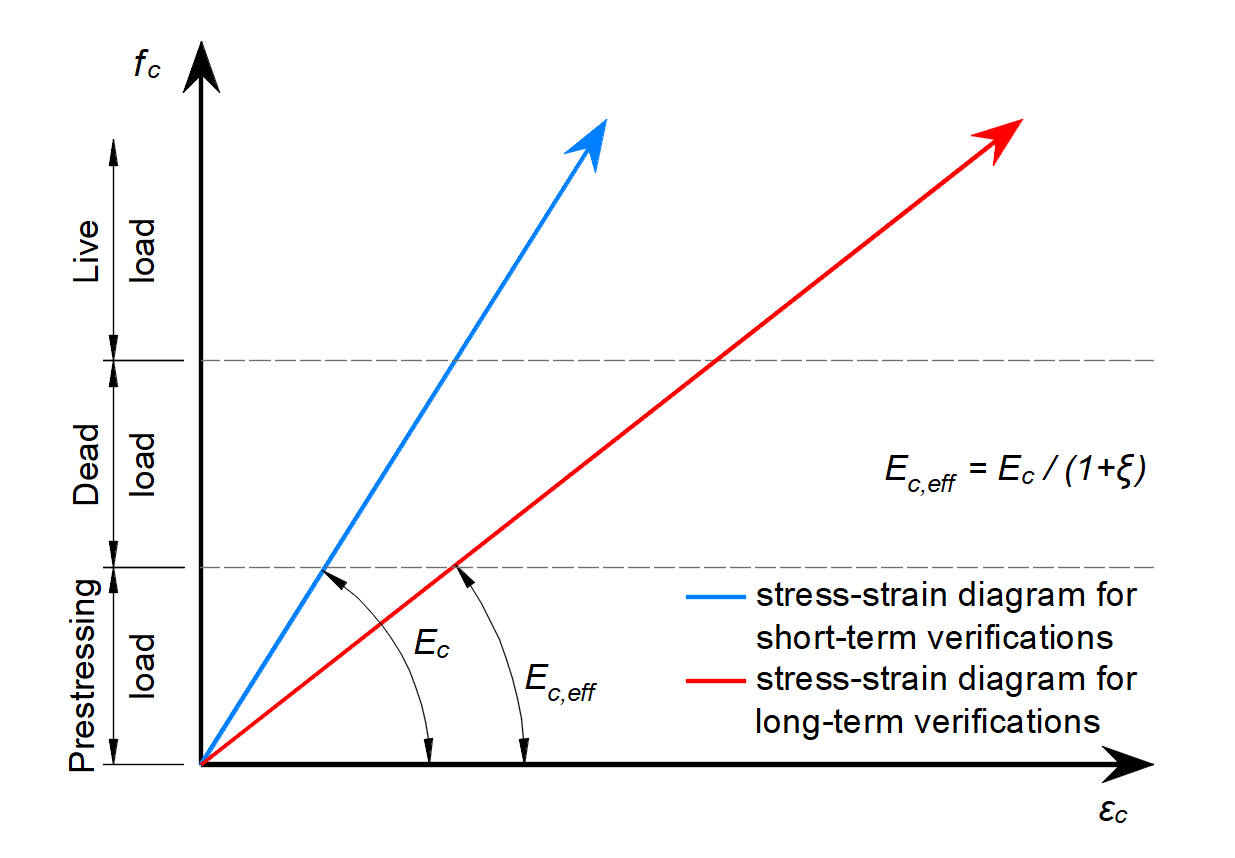
\[ \textsf{\textit{\footnotesize{Fig. 40\qquad Concrete stress-strain diagrams implemented for serviceability analysis: short- and long-term verifications.}}}\]
Effetti a lungo termine
Il comportamento a lungo termine della struttura, come le frecce differite o il calcolo delle ampiezze di fessura causate da carichi permanenti, è influenzato dalla viscosità del calcestruzzo. ACI 318-19 al paragrafo 24.2.4.1.3 definisce il fattore dipendente dal tempo per i carichi permanenti – ξ, che rappresenta l'effetto della viscosità per una durata specificata del carico permanente.
Nell'applicazione Detail, il modulo di elasticità Ec viene modificato per determinare il comportamento a lungo termine della struttura tramite il fattore ξ. Il modulo di elasticità modificato è denominato Ec,eff – vedere Figura 40.
Assumendo che la deformazione dell'elemento sia espressa dalla deformazione unitaria, si può scrivere che:
\[\epsilon_{tot} = \epsilon_{0} + \epsilon_{creep} = \epsilon_{0} \cdot (1+\xi)\]
dove:
ε0 è la deformazione a breve termine (senza l'influenza della viscosità) e εcreep è la deformazione causata dalla viscosità.
Applicando la legge di Hooke, si può scrivere:
\[E_{c,eff} = \frac{f_{c}}{\epsilon_{tot}}\]
Sostituendo \(\epsilon_{tot} = \epsilon_{0} \cdot (1+\xi)\) e \(\epsilon_{0} = f_{c} / E_{c}\) si ottiene:
\[E_{c,eff} = \frac{E_{c}}{1+\xi}\]
La durata del carico permanente per la determinazione del fattore ξ può essere impostata individualmente per ciascuna combinazione di esercizio a lungo termine.
\[ \textsf{\textit{\footnotesize{Fig. 41\qquad Sustained load duration}}}\]
Le frecce, le tensioni e le ampiezze di fessura dipendenti dal tempo vengono quindi calcolate con un modello di materiale modificato in cui l'effetto del raffinamento della compressione è tenuto in conto automaticamente dalla natura dell'analisi FE. Non è pertanto necessario moltiplicarle ulteriormente per il fattore definito in 24.2.4.1.1.
Effetti a breve termine
Per eseguire le verifiche a breve termine, viene effettuato un ulteriore calcolo in cui tutti i carichi sono calcolati senza il fattore dipendente dal tempo per i carichi permanenti. Entrambi i calcoli per le verifiche a lungo e a breve termine sono illustrati in Fig. 40.
Armatura
Si considera un diagramma tensione-deformazione perfettamente elasto-plastico con un punto di snervamento definito per l'armatura non precompressa, vedere ACI 319-19 CL. 20.2.1. La definizione di questo diagramma richiede solo la conoscenza delle proprietà di base dell'armatura – la resistenza e il modulo di elasticità.
Il diagramma tensione-deformazione dell'armatura può essere definito anche dall'utente, ma in questo caso non è possibile assumere l'effetto di irrigidimento a trazione (non è possibile calcolare l'ampiezza di fessura).
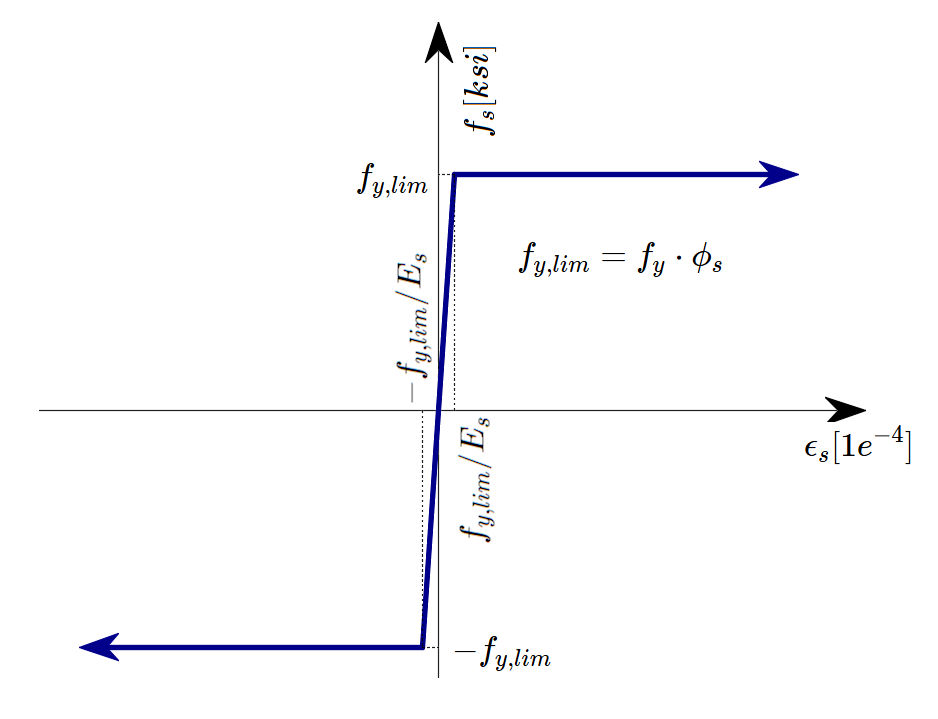
\[ \textsf{\textit{\footnotesize{Fig. 42 \qquad Stress-strain diagram of reinforcement}}}\]
dove:
Φs è il fattore di riduzione della resistenza per l'armatura. Il valore predefinito è impostato secondo ACI 318-19 Tabella 24.2.1.
fy è la tensione di snervamento dell'armatura
Es modulo di elasticità dell'armatura
Il 10% è selezionato come deformazione limite alla quale il calcolo viene interrotto. Ciò è considerato sicuro in base all'articolo 7 di ASTM A955/A955M-20c.
L'irrigidimento a trazione (Fig. 43) è tenuto in conto automaticamente modificando la relazione tensione-deformazione di input della barra di armatura nuda, al fine di cogliere la rigidezza media delle barre inglobate nel calcestruzzo (εm).
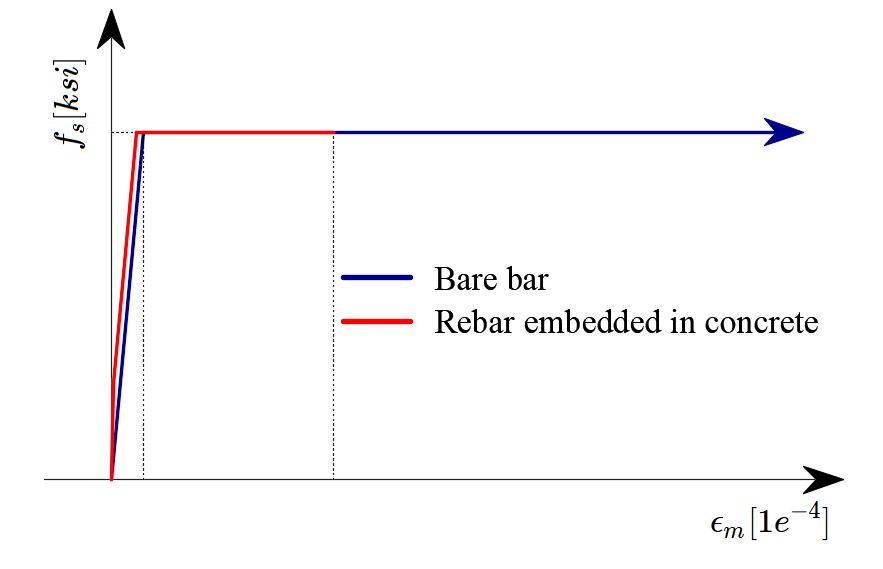
\[ \textsf{\textit{\footnotesize{Fig. 43\qquad Scheme of tension stiffening.}}}\]
5.2 Fattori di riduzione della resistenza e fattori di carico
Il Metodo del Campo di Tensioni Compatibile è conforme ai moderni codici di progettazione. Poiché i modelli di calcolo utilizzano solo proprietà dei materiali standard, il formato del coefficiente di sicurezza parziale prescritto nei codici di progettazione può essere applicato senza alcun adattamento. In questo modo, i carichi di input sono amplificati e le proprietà caratteristiche dei materiali sono ridotte utilizzando i rispettivi fattori di riduzione della resistenza, esattamente come nell'analisi convenzionale del calcestruzzo.
I valori dei fattori di riduzione della resistenza sono prescritti in ACI 318-19 Cl. 21.2. I valori predefiniti per il calcestruzzo e l'armatura sono scelti sulla base dell'ipotesi che il tipico esempio risolto nell'applicazione sia controllato dal taglio (in base alla Tabella 21.2.1 (b), (f), (g)). Tuttavia, è possibile modellare qualsiasi tipo di elemento. Pertanto, se viene valutato un elemento controllato dalla compressione o dalla trazione, l'utente ha la possibilità di modificare il valore del fattore di riduzione della resistenza nelle Preferenze.
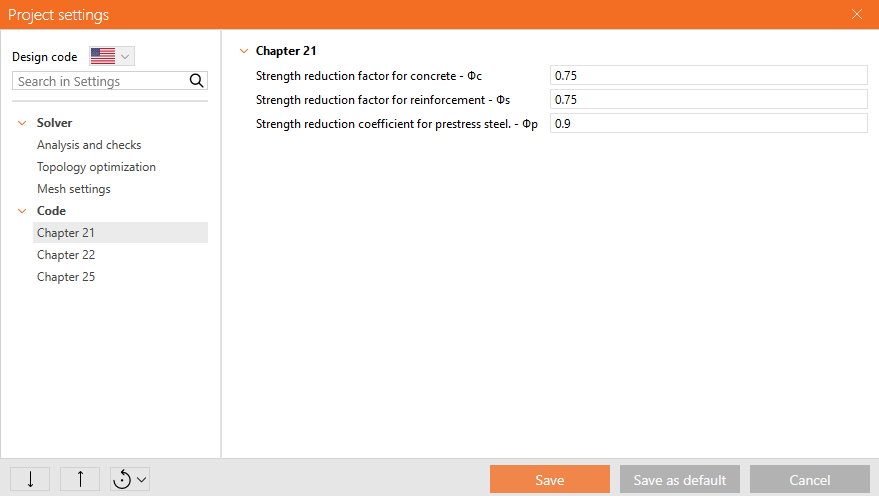
\[ \textsf{\textit{\footnotesize{Fig. 44\qquad The setting of strength reduction factors in IDEA StatiCa Detail.}}}\]
Fattori di carico per le combinazioni di resistenza devono essere definiti secondo ACI 318-19 Tabella 5.3.1.
Salvo quanto indicato nel Capitolo 34, le combinazioni di carico a livello di esercizio non sono definite in ACI 318-19. Si raccomanda di utilizzare le regole di combinazione basate sull'Appendice C di ASCE/SEI 7-16. Per tutti i modelli, i fattori di carico sono già predefiniti.
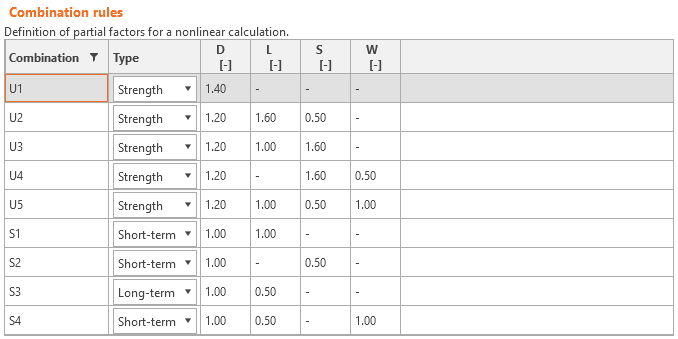
\[ \textsf{\textit{\footnotesize{Fig. 45\qquad The setting of load factors in Idea StatiCa Detail.}}}\]
5.3 Verifiche di resistenza
Le diverse verifiche richieste da ACI 318-19 sono valutate sulla base dei risultati diretti forniti dal modello. Le verifiche vengono eseguite per la resistenza del calcestruzzo, la resistenza dell'armatura e l'ancoraggio (tensioni tangenziali di aderenza).
La resistenza del calcestruzzo a compressione è valutata come il rapporto tra la massima tensione principale di compressione fc (anche σ2 nei risultati ausiliari) ottenuta dall'analisi FE e il valore limite f'c,lim.
La resistenza dell'armatura è valutata sia a trazione che a compressione come il rapporto tra la tensione nell'armatura alle fessure fs e il valore limite specificato fy,lim.
La tensione tangenziale di aderenza è valutata indipendentemente come il rapporto tra la tensione di aderenza τb calcolata dall'analisi FE e la resistenza di aderenza fbu.
Tuttavia, la norma ACI non affronta esplicitamente la resistenza di aderenza, ma lavora piuttosto con il calcolo della cosiddetta lunghezza di ancoraggio, descritta nella Sezione 25.4.2. Poiché la resistenza di aderenza è un parametro di input fondamentale per determinare la lunghezza di ancoraggio, si veda R25.4.1.1 e ACI Committee 408 1966, la resistenza di aderenza può essere calcolata come segue:
Si supponga che, ancorando la barra di armatura in un blocco di calcestruzzo per una lunghezza pari alla lunghezza di ancoraggio ld o superiore, l'estrazione dell'armatura porti alla rottura dell'armatura stessa e non all'estrazione dal calcestruzzo. Ciò può essere espresso con la seguente formula.
\[\pi\cdot d_{b} \cdot l_{d} \cdot f_{bu}=f_{y}\cdot A_{s}\]
dove:
db è il diametro della barra di armatura, ld è la lunghezza di ancoraggio, fbu è la resistenza di aderenza, fy è la tensione di snervamento dell'armatura e As è l'area della barra di armatura.
Da quanto precede, la formula per il calcolo della resistenza di aderenza può essere facilmente derivata:
\[f_{bu}=\frac{f_{y}\cdot A_{s}}{\pi\cdot d_{b} \cdot l_{d} }\]
La lunghezza di ancoraggio ld è quindi determinata secondo la Tabella 25.4.2.3 di ACI 318-19 come segue:
\[l_{d}=\left( \frac{f_{y}\cdot\psi_{t}\cdot\psi_{e}\cdot\psi_{g}}{C\cdot\lambda\sqrt{f'_{c}}} \right)\cdot d_{b}\]
dove:
C = 25 (2,1 per il sistema metrico) per barre n. 6 e inferiori e fili deformati, C = 20 (1,7 per il sistema metrico) per barre n. 7 e superiori, λ = 1,0 per calcestruzzo a peso normale, ψt, ψe, ψg sono determinati secondo la Tabella 25.4.2.3 di ACI 318-19.
È supportata solo l'armatura non rivestita o zincata (galvanizzata), quindi ψe = 1,0. ψg è determinato automaticamente dalla classe dell'armatura e ψt è derivato automaticamente dalla posizione dell'armatura nel modello e dalla direzione di getto del calcestruzzo, che può essere impostata nell'applicazione per ciascun elemento di progetto come segue.
\[ \textsf{\textit{\footnotesize{Fig. 46\qquad Direction of concreting}}}\]
Queste verifiche vengono eseguite rispetto ai valori limite appropriati per le rispettive parti della struttura (ovvero, nonostante si utilizzi una singola classe sia per il calcestruzzo che per il materiale dell'armatura, i diagrammi tensione-deformazione finali differiranno in ciascuna parte della struttura a causa degli effetti di irrigidimento a trazione e ammorbidimento a compressione).
È disponibile anche un'opzione per modellare barre lisce. Ulteriori informazioni sono disponibili qui: Barre lisce in Detail
Forza totale Ftot e forza limite Flim
La forza totale Ftot è un risultato dell'analisi agli elementi finiti e può essere definita in due modi.
\[F_{tot}=A_{s} \cdot f_{s}\]
dove As è l'area della barra di armatura e fs è la tensione nella barra.
Oppure come somma della forza di ancoraggio Fa e della forza di aderenza Fbond.
\[F_{tot}=F_{a}+F_{bond}\]
dove Fa è la forza effettiva nella molla di ancoraggio e Fbond è la forza di aderenza che può essere ottenuta integrando la tensione tangenziale di aderenza τb lungo la lunghezza della barra di armatura l.
\[F_{bond}=C_{s} \cdot \int_{0}^{l}\tau_{b}\left( x \right)dx\]
Cs è la circonferenza della barra di armatura.
La forza limite Flim è la forza massima nell'elemento della barra considerando la resistenza della barra e le condizioni di ancoraggio (aderenza tra calcestruzzo e armatura e ganci, anelli di ancoraggio, ecc.).
\[F_{lim}=min\left( F_{lim,bond}+F_{au},F_{u} \right)\]
\[F_{u}=f_{y,lim}\cdot A_{s}\]
\[F_{au}=\beta\cdot f_{y,lim}\cdot A_{s}\]
\[F_{lim,bond}=C_{s}\cdot l \cdot f_{bu}\]
dove Cs è la circonferenza della barra di armatura e l è la lunghezza dall'inizio della barra al punto di interesse.
\[ \textsf{\textit{\footnotesize{Fig. 47\qquad Definition of the limit force Flim}}}\]
\[F_{lim,2}=F_{lim,1}+F_{lim,add}\]
dove Flim,add è la forza aggiuntiva calcolata in base all'entità dell'angolo tra elementi adiacenti. Flim,2 deve essere sempre inferiore a Fu.
I tipi di ancoraggio disponibili in CSFM includono una barra diritta (ovvero senza riduzione dell'estremità di ancoraggio), gancio a 90 gradi, gancio a 180 gradi, aderenza perfetta e barra continua. Tutti questi tipi, insieme ai rispettivi coefficienti di ancoraggio β, sono mostrati nella Fig. 48 per l'armatura longitudinale. I valori dei coefficienti di ancoraggio adottati sono derivati dal confronto tra l'equazione della sezione ACI 318-19 25.4.3.1 e le equazioni della sezione ACI 318-19 25.4.2.3. È opportuno notare che, nonostante le diverse opzioni disponibili, CSFM distingue tre tipi di estremità di ancoraggio: (i) nessuna riduzione della lunghezza di ancoraggio, (ii) una riduzione del 30% della lunghezza di ancoraggio nel caso di un ancoraggio normalizzato e (iii) aderenza perfetta.

\[ \textsf{\textit{\footnotesize{Fig. 48\qquad Available anchorage types and respective anchorage coefficients for longitudinal reinforcing bars in CSFM:}}}\]
\[ \textsf{\textit{\footnotesize{(a) straight bar; (b) 90-degree hook; (c) 180-degree hook; (d) perfect bond; (e) continuous bar}}}\]
Il coefficiente di ancoraggio per le staffe è sempre β = 1,0.
Per conformarsi ad ACI, nel calcolo deve essere utilizzata la molla di ancoraggio; la molla di ancoraggio è modificata dal coefficiente β, pertanto l'utente deve utilizzare uno dei tipi di ancoraggio disponibili quando definisce le condizioni di inizio e fine dell'armatura.
5.4 Zone di appoggio e di ancoraggio – Aree parzialmente caricate
Nella progettazione di strutture in calcestruzzo, si incontrano due grandi gruppi di aree parzialmente caricate (PLA) – il primo comprende gli appoggi, mentre l'altro è costituito dalle zone di ancoraggio.
Secondo le norme attualmente in vigore per la progettazione di strutture in calcestruzzo armato ACI 318-19 cap. 22.8, per gli appoggi devono essere considerati lo schiacciamento locale del calcestruzzo e le forze di trazione trasversale. Per un carico uniformemente distribuito su un'area, Ac1, la capacità a compressione del calcestruzzo può essere aumentata fino a due volte in funzione dell'area di distribuzione di progetto Ac2. Si veda la tabella ACI 318-19 22.8.3.2.
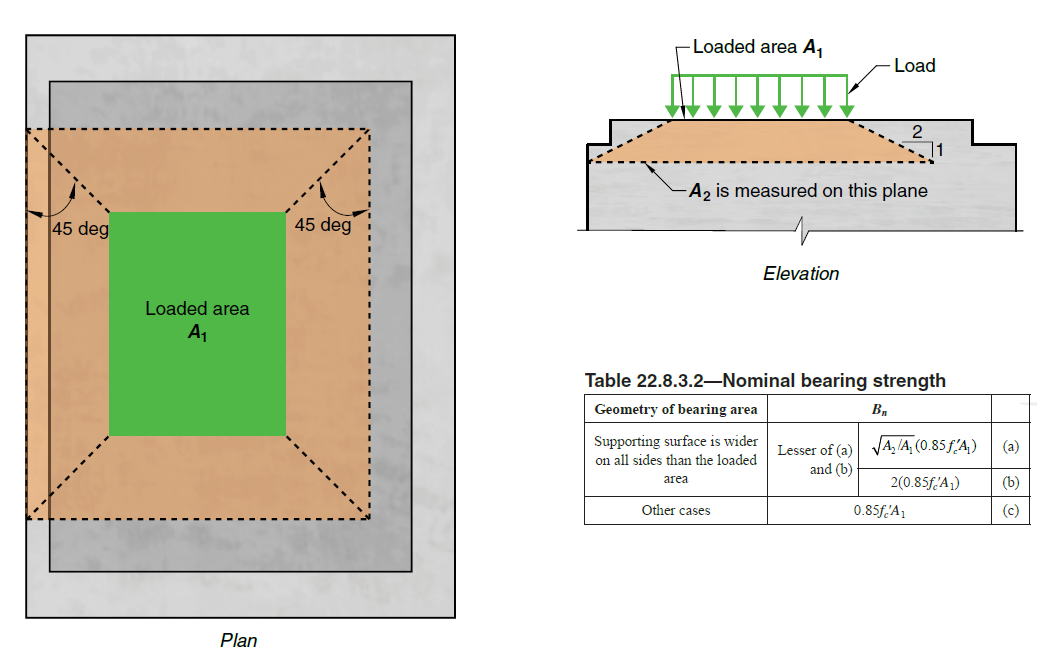
\[ \textsf{\textit{\footnotesize{Fig. 49\qquad Partially loaded areas for bearings according to ACI 318-19}}}\]
Per le zone di ancoraggio post-tese, si deve fare riferimento all'ACI 318-19 cap. 25.9.
L'area parzialmente caricata deve essere adeguatamente armata con armatura trasversale progettata per trasmettere le forze di fessurazione che si sviluppano nella zona. In assenza della necessaria armatura trasversale, non è possibile considerare l'incremento della capacità a compressione del calcestruzzo.
Aree parzialmente caricate nel CSFM
\[ \textsf{\textit{\footnotesize{Fig. 50\qquad Fictitious struts with concrete finite element mesh.}}}\]
Utilizzando il CSFM, è possibile progettare e verificare strutture in calcestruzzo armato includendo l'influenza dell'incremento della resistenza a compressione del calcestruzzo nelle aree parzialmente caricate. Poiché il CSFM è un modello a parete (2D) e le aree parzialmente caricate sono un problema spaziale (3D), è stato necessario trovare una soluzione che combinasse questi due diversi tipi di problemi (Fig. 50). Se la funzione "aree parzialmente caricate" è attivata, la geometria del cono ammissibile viene creata secondo l'ACI (Fig. 49). Tutte le interferenze geometriche vengono risolte completamente in 3D per la geometria dell'elemento in calcestruzzo specificata e le dimensioni di ciascuna PLA. Successivamente viene creato un modello di calcolo dell'area parzialmente caricata.
\[ \textsf{\textit{\footnotesize{Fig. 51\qquad Allowable cone geometries.}}}\]
La modifica del modello di materiale si è rivelata un approccio inadeguato, principalmente perché la mappatura delle proprietà sulla rete di elementi finiti risulta problematica. È stato stabilito che un approccio indipendente dalla rete di elementi finiti rappresenta una soluzione più appropriata. Per la geometria del cono di compressione nota vengono creati puntoni fittizi perfettamente coerenti (Fig. 51 e Fig. 52). Questi puntoni hanno proprietà di materiale identiche a quelle del calcestruzzo utilizzato nel modello, incluso il diagramma tensione-deformazione. La forma del cono determina la direzione dei puntoni, che distribuisce progressivamente il carico dalla PLA all'area di distribuzione di progetto. La densità areale dei puntoni fittizi è variabile in ciascuna parte del cono e aggiunge un'area fittizia di calcestruzzo nella direzione del carico. Al livello dell'area caricata (Ac1), viene aggiunta un'area fittizia di calcestruzzo secondo il rapporto \(\sqrt{A_{c1} \cdot A_{c2}} - A_{real}\) (dove Areal è l'area dell'appoggio assunta nel modello di calcolo 2D), e tale area decresce linearmente a zero verso l'area di distribuzione di progetto (Ac2). Questa soluzione garantisce che la tensione di compressione nel calcestruzzo sia costante sull'intero volume del cono.
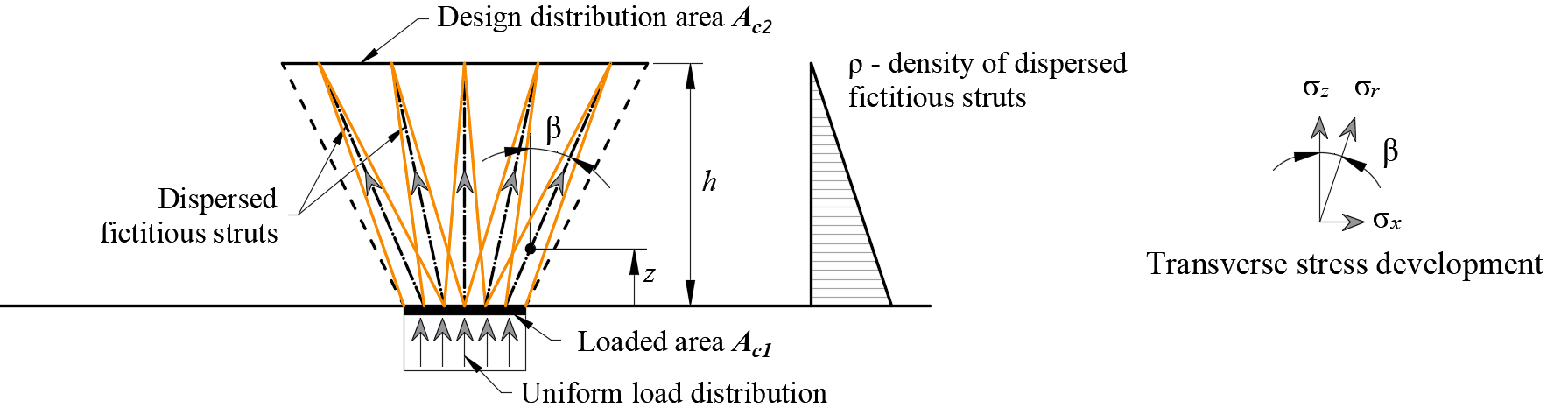
\[\rho \left( {\beta ,z} \right) = \left( {\sqrt {\frac{A_{c2}}{A_{c1}}} - \frac{A_{real}}{A_{c1}}} \right)\,\cdot\,\left( {1 - \frac{z}{h}} \right)\,\cdot\,\frac{1}{{\cos \beta }}\]
\[ \textsf{\textit{\footnotesize{Fig. 52\qquad Fictitious struts in the computational model}}}\]
La resistenza dell'area parzialmente caricata viene incrementata in base al rapporto tra l'area di distribuzione di progetto e l'area caricata, come stabilito dall'ACI 318-19 cap. 22.8. È opportuno ricordare che si tratta di un modello di calcolo che non può descrivere con precisione lo stato tensionale in un'area parzialmente caricata, il cui andamento reale è molto più complesso. Tuttavia, questa soluzione consente la corretta distribuzione del carico sull'intero modello rispettando al contempo la maggiore capacità portante dell'area parzialmente caricata. Inoltre, introduce correttamente le tensioni trasversali in questa zona per una corretta progettazione dell'armatura per le forze di fessurazione.
La tensione di appoggio ammissibile di 0.85fc' è riportata nella Tabella 22.8.3.2. La densità è limitata in modo da non superare la doppia capacità massima indicata nella formula della Tabella 22.8.3.2(b).
Per le zone di ancoraggio, la PLA viene utilizzata nell'applicazione nello stesso modo degli appoggi. Per questo motivo, le zone locali definite nel capitolo 25.9 dell'ACI 318-19 devono essere verificate manualmente secondo l'ACI 318-19 25.9.3. La PLA viene quindi utilizzata esclusivamente per evitare il superamento del criterio di deformazione nella zona locale e il conseguente arresto prematuro del calcolo. D'altra parte, secondo l'ACI 318-19, Cl. 25.9.4.3.1 (b), l'armatura che resiste alle tensioni di bursting e spalling nel piano può essere verificata direttamente e vantaggiosamente nell'applicazione.
5.5 Verifiche agli stati limite di esercizio
Le verifiche agli stati limite di esercizio vengono eseguite per la limitazione delle tensioni, l'ampiezza delle fessure e i limiti di deformazione. Le tensioni vengono verificate negli elementi in calcestruzzo e nell'armatura secondo ACI 318-19, in modo analogo a quanto specificato per la Resistenza.
Limitazione delle tensioni
Le tensioni di compressione ammissibili nel calcestruzzo ai carichi di esercizio devono essere verificate per gli elementi precompressi di Classe U e T. In base alla Tabella R24.5.2.1, non è richiesta alcuna verifica della limitazione delle tensioni per il calcestruzzo che si assume fessurato. L'utente deve impostare la classe dell'elemento precompresso nelle impostazioni dell'elemento di progetto.
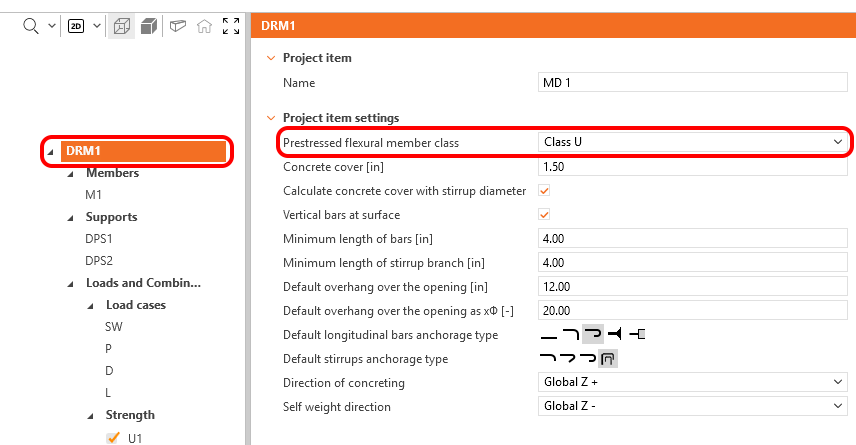
\[ \textsf{\textit{\footnotesize{Fig. 53\qquad Prestressed flexural member class selection}}}\]
La tensione di compressione ammissibile per gli elementi soggetti a carichi transitori è specificata da ACI 318-19 24.5.4.1 come 0.6fc'. Il limite di tensione di compressione di 0.45fc' è stato stabilito per ridurre la probabilità di collasso degli elementi in calcestruzzo precompresso dovuto a carichi ripetuti. Questo limite è apparso ragionevole anche per escludere deformazioni viscose eccessive. A valori di tensione più elevati, le deformazioni viscose tendono ad aumentare più rapidamente all'aumentare della tensione applicata.
La tensione di compressione nel calcestruzzo viene valutata come rapporto tra la massima tensione principale di compressione fc = σc2 ottenuta dall'analisi FE per l'esercizio e il valore limite, che viene impostato in base alla Tabella 24.5.4.1.
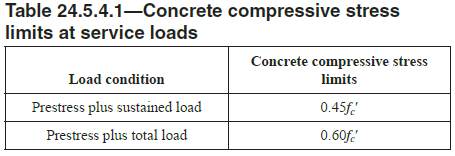
\[ \textsf{\textit{\footnotesize{Fig. 54\qquad Concrete compressive stress limits at service loads}}}\]
Nell'applicazione, Precompressione più carico permanente è trattata come combinazione a lungo termine, e Precompressione più carico totale come combinazione a breve termine.
Deformazione
In base al tipo di combinazione selezionata (a lungo termine o a breve termine), viene valutata la deformazione a lungo termine o a breve termine. Il valore massimo ammissibile della deformazione deve essere determinato dall'utente e deve essere considerato in conformità con ACI 138-19 24.2.

\[ \textsf{\textit{\footnotesize{Fig. 55\qquad Maximum allowable deflection value}}}\]
Nell'applicazione, è possibile visualizzare separatamente le deformazioni dovute al carico permanente ΔDL e al carico variabile ΔLL, nonché la deformazione totale ΔTot (permanente+variabile), visualizzando al contempo la forma deformata.
Le deformazioni alle estremità rifilate non possono essere verificate.
Ampiezza delle fessure
Le ampiezze e le orientazioni delle fessure vengono calcolate per le combinazioni di esercizio a breve termine o a lungo termine. Poiché la normativa ACI non prescrive direttamente i valori limite dell'ampiezza delle fessure, l'utente deve specificare un valore limite dell'ampiezza delle fessure wlim.
Le verifiche sono presentate come segue:
\[\frac{w}{w_{lim}}\]
dove:
w ampiezza della fessura a breve o lungo termine calcolata dall'analisi FE,
wlim valore limite dell'ampiezza della fessura definito dall'utente.
Il metodo di calcolo dell'ampiezza delle fessure utilizzato nell'applicazione, descritto in modo più dettagliato in questo documento, è conforme ad ACI 224R-01. È pertanto possibile utilizzare la Tabella 4.1 di ACI 224R-01 per determinare il valore limite dell'ampiezza delle fessure.
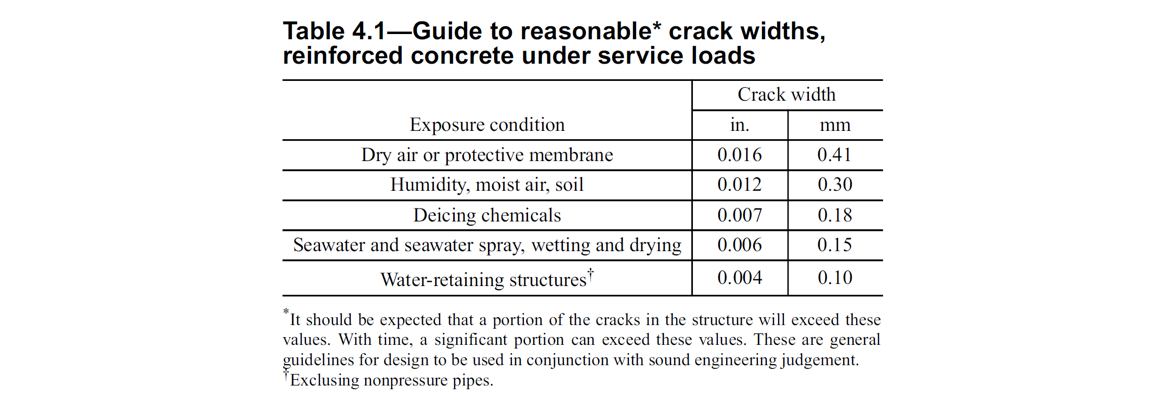
\[ \textsf{\textit{\footnotesize{Fig. 56\qquad Reasonable crack widths for reinforced concrete under service load}}}\]
Esistono due metodi per il calcolo dell'ampiezza delle fessure (fessurazione stabilizzata e non stabilizzata). Nel caso generale (fessurazione stabilizzata), l'ampiezza della fessura viene calcolata integrando le deformazioni sugli elementi 1D delle barre di armatura. La direzione della fessura viene quindi calcolata dai tre punti di integrazione più vicini (dal centro del dato elemento finito 1D dell'armatura) degli elementi 2D in calcestruzzo. Sebbene questo approccio al calcolo delle direzioni delle fessure non corrisponda alla posizione reale delle fessure, fornisce comunque valori rappresentativi che portano a risultati dell'ampiezza delle fessure confrontabili con i valori richiesti dalla normativa nella posizione della barra di armatura.
6 Verifiche strutturali secondo AASHTO
6.1 Modelli di materiale (AASHTO)
Calcestruzzo - Resistenza
Il modello di calcestruzzo implementato per i calcoli di resistenza nel CSFM si basa sulle ipotesi di progettazione a resistenza AASHTO LRFD di equilibrio e compatibilità delle deformazioni. In conformità con l'articolo 5.6.2.1 di AASHTO LRFD (2024), la resistenza a trazione del calcestruzzo è trascurata.
\[ \textsf{\textit{\footnotesize{Fig. 57\qquad The stress-strain diagram of concrete for Strength analysis}}}\]
L'implementazione del CSFM in IDEA StatiCa Detail non considera un criterio di rottura esplicito in termini di deformazioni per il calcestruzzo compresso (ovvero, dopo il raggiungimento della tensione di picco, considera un ramo plastico con εc0 con valore massimo del 5%, mentre l'articolo 5.6.2.1 di AASHTO LRFD (2024) assume una deformazione ultima inferiore allo 0,3%). Questa semplificazione non consente di verificare la capacità deformativa delle strutture che collassano per compressione. Tuttavia, la resistenza è correttamente prevista quando, in aggiunta al fattore del calcestruzzo fessurato (kc2 definito in (Fig. 57)), l'aumento della fragilità del calcestruzzo all'aumentare della sua resistenza è considerato tramite il fattore di riduzione \(\eta_{fc}\) definito nel fib Model Code 2010 come segue:
\[f'_{c,lim}=\alpha_{1}\cdot\phi_{c}\cdot k_{c}\cdot f'_{c}\]
\[k_{c}=\eta_{fc}\cdot k_{c2}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f'_{c}}}}} \right)^{\frac{1}{3}}} \le 1\]
dove:
α1 è il fattore di riduzione della resistenza a compressione del calcestruzzo definito nell'articolo 5.6.2.2 di AASHTO LRFD (2024). Quando si utilizza un diagramma tensione-deformazione a parabola-rettangolo, è necessario ridurre la tensione massima di compressione di questo fattore. Ciò media la distribuzione delle tensioni nella zona compressa in modo tale che la resistenza a compressione risultante sia inferiore o uguale alla resistenza a compressione calcolata utilizzando un diagramma tensione-deformazione con un ramo plastico decrescente.
Φc è il fattore di resistenza per il calcestruzzo. Il valore predefinito è impostato in conformità con l'articolo 5.5.4.2 di AASHTO LRFD (2024).
kc2 è il fattore di riduzione dovuto alla presenza di fessurazioni trasversali.
f'c è la resistenza cilindrica del calcestruzzo (in MPa per la definizione di \( \eta_{fc} \)).
\[ \textsf{\textit{\footnotesize{Fig. 58\qquad The compression softening law.}}}\]
kc2 è un fattore di riduzione basato sulle stesse ipotesi del fattore di efficienza del calcestruzzo ν fornito in AASHTO LRFD (2024) 5.8.2.5.3a e Tabella 5.8.2.5.3a-1, con la differenza che nel CSFM la presenza di una tensione principale di trazione perpendicolare alla tensione principale di compressione è verificata per ciascun elemento finito (non solo per i nodi del modello Puntone e tirante).
Calcestruzzo – Stato limite di esercizio
L'analisi allo stato limite di esercizio contiene alcune semplificazioni dei modelli costitutivi utilizzati per l'analisi di resistenza. Il ramo plastico del diagramma tensione-deformazione del calcestruzzo compresso è trascurato, mentre il ramo elastico è lineare e infinito. La legge di ammorbidimento a compressione non è considerata. Queste semplificazioni migliorano la stabilità numerica e la velocità di calcolo e non riducono la generalità della soluzione fintanto che i limiti di tensione del materiale risultante allo stato limite di esercizio siano chiaramente al di sotto dei loro punti di snervamento (coerentemente con l'approccio allo stato limite di servizio di AASHTO LRFD). Pertanto, i modelli semplificati utilizzati per lo stato limite di esercizio sono validi solo se tutti i requisiti di verifica sono soddisfatti.

\[ \textsf{\textit{\footnotesize{Fig. 59\qquad Concrete stress-strain diagrams implemented for serviceability analysis: short- and long-term verifications.}}}\]
Effetti a lungo termine
La legge costitutiva a lungo termine (la curva rossa in Fig. 59) è utilizzata per il calcolo dell'ampiezza delle fessure, della freccia totale e della limitazione delle tensioni degli elementi precompressi quando è selezionato l'effetto a lungo termine nella barra superiore. Nell'applicazione IDEA StatiCa Detail, il modulo di elasticità efficace è utilizzato per la verifica degli effetti a lungo termine, come indicato in AASHTO LRFD (2024) C5.12.5.3.6-1.
\[E_{eff} = \frac{E_{c}}{1+\psi}\]
dove:
Ec è il modulo di elasticità definito nell'articolo 5.4.2.4 di AASHTO LRFD (2024)
ψ è il coefficiente di viscosità definito nell'articolo 5.4.2.3.2 di AASHTO LRFD (2024)
I fattori di viscosità sono definiti dall'utente nelle proprietà del materiale.
Effetti a breve termine
Per eseguire le verifiche a breve termine, viene effettuato un ulteriore calcolo in cui tutti i carichi sono calcolati senza il fattore di viscosità. Entrambi i calcoli per le verifiche a lungo e a breve termine sono illustrati in Fig. 59.
Armatura
Si considera un diagramma tensione-deformazione perfettamente elasto-plastico con un punto di snervamento definito per l'armatura non precompressa, vedere l'articolo 5.4.3 di AASHTO LRFD (2024). La definizione di questo diagramma richiede solo la conoscenza delle proprietà di base dell'armatura – la resistenza e il modulo di elasticità.
Il diagramma tensione-deformazione dell'armatura può essere definito anche dall'utente, ma in questo caso non è possibile assumere l'effetto di irrigidimento a trazione (non è possibile calcolare l'ampiezza delle fessure).
\[ \textsf{\textit{\footnotesize{Fig. 60 \qquad Stress-strain diagram of reinforcement}}}\]
dove:
Φs è il fattore di resistenza per l'armatura. Il valore predefinito è impostato in conformità con l'articolo 5.5.4.2 di AASHTO LRFD (2024).
fy è la tensione di snervamento dell'armatura
Es è il modulo di elasticità dell'armatura
Il 10% è selezionato come deformazione limite alla quale il calcolo viene interrotto. Ciò è considerato sicuro in base all'articolo 7 di ASTM A955/A955M-20c.
L'irrigidimento a trazione (Fig. 61) è considerato automaticamente modificando il diagramma tensione-deformazione di input della barra di armatura nuda al fine di cogliere la rigidezza media delle barre inglobate nel calcestruzzo (εm).
\[ \textsf{\textit{\footnotesize{Fig. 61\qquad Scheme of tension stiffening.}}}\]
6.2 Fattori di resistenza e di carico
Il Metodo del Campo di Tensioni Compatibile è conforme ai moderni codici di progettazione. Poiché i modelli di calcolo utilizzano solo proprietà dei materiali standard, il formato del coefficiente di sicurezza parziale prescritto nei codici di progettazione può essere applicato senza alcun adattamento. In questo modo, i carichi di input sono amplificati e le proprietà caratteristiche dei materiali sono ridotte utilizzando i rispettivi fattori di resistenza, esattamente come nell'analisi convenzionale del calcestruzzo.
I valori dei fattori di resistenza sono prescritti nell'AASHTO LRFD (2024) Articolo 5.5.4. I valori predefiniti per il calcestruzzo e l'armatura sono scelti in modo conservativo, sulla base dell'ipotesi che il tipico esempio risolto sia una regione D - un caso tipico per il metodo SaT. Tuttavia, è possibile modellare qualsiasi tipo di elemento. Pertanto, se viene valutato un elemento controllato dalla compressione o dalla trazione, l'utente ha la possibilità di modificare il valore del fattore di riduzione della resistenza nelle Preferenze.

\[ \textsf{\textit{\footnotesize{Fig. 62\qquad The setting of resistance factors in IDEA StatiCa Detail.}}}\]
I fattori di carico e le combinazioni di carico devono essere definiti secondo le AASHTO LRFD Bridge Design Specifications (2024), Articolo 3.4.1 e Tabelle 3.4.1-1 fino a 3.4.1-6. AASHTO LRFD specifica esplicitamente le combinazioni di carico allo stato limite di resistenza (Strength I fino a Strength V) nonché le combinazioni di carico a livello di esercizio (Service I fino a Service IV), inclusi i corrispondenti fattori di carico per ciascun caso.
Per ogni modello, il programma include combinazioni di base predefinite che richiedono completamento a seconda dell'elemento in elaborazione.

\[ \textsf{\textit{\footnotesize{Fig. 63\qquad The setting of load factors in Idea StatiCa Detail.}}}\]
6.3 Stato limite di resistenza
Le diverse verifiche richieste da AASHTO sono valutate sulla base dei risultati diretti forniti dal modello. Le verifiche vengono eseguite per la resistenza del calcestruzzo, la resistenza dell'armatura e l'ancoraggio (tensioni tangenziali di aderenza).
La resistenza del calcestruzzo a compressione è valutata come il rapporto tra la massima tensione principale di compressione fc (anche σ2 nei risultati ausiliari) ottenuta dall'analisi FE e il valore limite f'c,lim.
La resistenza dell'armatura è valutata sia a trazione che a compressione come il rapporto tra la tensione nell'armatura alle fessure fs e il valore limite specificato fy,lim.
La tensione tangenziale di aderenza è valutata indipendentemente come il rapporto tra la tensione di aderenza τb calcolata dall'analisi FE e la resistenza di aderenza fbu.
Tuttavia, poiché la resistenza di aderenza non è esplicitamente definita in AASHTO, il suo valore deve essere determinato utilizzando le equazioni che definiscono la lunghezza di ancoraggio. La resistenza di aderenza è, di fatto, il parametro di ingresso principale per determinare la lunghezza di ancoraggio; si veda, ad esempio, l'articolo AASHTO LRFD (2024) C5.10.8.2 o il Rapporto NCHRP 733, Allegato E pagina E-9.
Il calcolo descritto negli articoli AASHTO LRFD (2024) 5.10.8.2.1 e 5.10.8.2.2, che richiede la conoscenza dell'interasse massimo tra le armature trasversali all'interno di ld, il numero di barre o fili sviluppati lungo il piano di fessurazione, l'area della sezione trasversale totale di tutta l'armatura trasversale e altre grandezze geometriche che non possono essere determinate in modo affidabile nel modello dell'applicazione Detail per un input generico, è stato adottato un approccio dall'articolo AASHTO LRFD (2014) 5.11.2.1.1 nel modo seguente:
Si supponga che, ancorando la barra di armatura in un blocco di calcestruzzo per una lunghezza pari alla lunghezza di ancoraggio ld o superiore, l'estrazione dell'armatura porti alla rottura dell'armatura stessa e non all'estrazione dal calcestruzzo. Ciò può essere espresso con la seguente formula.
\[\pi\cdot d_{b} \cdot l_{d} \cdot f_{bu}=f_{y}\cdot A_{b}\]
dove:
- db è il diametro della barra di armatura
- ld è la lunghezza di ancoraggio
- fbu è la resistenza di aderenza
- fy è la tensione di snervamento dell'armatura
- Ab è l'area della sezione trasversale della barra di armatura
Da quanto precede, la formula per il calcolo della resistenza di aderenza può essere facilmente derivata.
\[f_{bu}=\frac{f_{y}\cdot A_{b}}{\pi\cdot d_{b} \cdot l_{d} }\]
La lunghezza di ancoraggio di base a trazione ldb è determinata nell'articolo AASHTO LRFD (2014) 5.11.2.1.1 come segue:
Per barre n. 11 e inferiori: \(l_{bd}=\max\left(1.25\cdot\dfrac{A_{b}\cdot f_{y}}{\sqrt{f'_{c}}},\ 0.4\cdot d_{b}\cdot f_{y}\right)\)
Per barre n. 14: \(l_{bd}=\dfrac{2.70\cdot f_{y}}{\sqrt{f'_{c}}}\)
Per barre n. 18: \(l_{bd}=\dfrac{3.5\cdot f_{y}}{\sqrt{f'_{c}}}\)
dove:
- Ab è l'area della sezione trasversale della barra di armatura (in2)
- fy è la tensione di snervamento specificata dell'armatura (ksi)
- f'c resistenza a compressione specificata del calcestruzzo a 28 giorni, salvo diversa indicazione di età (ksi)
- db è il diametro della barra di armatura (in)
Quindi, moltiplicando la lunghezza di ancoraggio di base ldb per i fattori descritti negli articoli AASHTO LRFD (2014) 5.11.2.1.2 e 5.11.2.1.3, viene determinata la lunghezza di ancoraggio ld come dato di ingresso.
I fattori di modifica che riducono la lunghezza di ancoraggio secondo il punto 5.11.2.1.3 sono sempre pari a 1,0 nell'applicazione. Il fattore di modifica per l'armatura orizzontale superiore o quasi orizzontale è pari a 1,4 per condizioni di aderenza 'scarse', secondo la figura seguente:

\[ \textsf{\textit{\footnotesize{Fig. 64\qquad Description of bond conditions; a) b) 'good' bond conditions for all bars; c) d) unhatched zone – 'good' bond conditions, hatched zone – 'poor' bond conditions}}}\]
La direzione del getto di calcestruzzo può essere impostata nell'applicazione.
\[ \textsf{\textit{\footnotesize{Fig. 65\qquad Direction of concreting}}}\]
Tutti gli altri fattori determinati al punto 5.11.2.1.2 sono pari a 1,0 poiché è supportato solo il calcestruzzo a peso normale e solo l'armatura non rivestita.
La tensione tangenziale di aderenza e la resistenza di aderenza delle barre a compressione sono calcolate in modo analogo alle barre a trazione, ma vengono utilizzate le equazioni dell'articolo AASHTO LRFD (2014) 5.11.2.2.
È inoltre disponibile un'opzione per modellare barre lisce. Ulteriori informazioni sono disponibili qui: Barre lisce in Detail
Forza totale Ftot e forza limite Flim
La forza totale Ftot è un risultato dell'analisi agli elementi finiti e può essere definita in due modi.
\[F_{tot}=A_{b} \cdot f_{s}\]
dove Ab è l'area della barra di armatura e fs è la tensione nella barra.
Oppure come somma della forza di ancoraggio Fa e della forza di aderenza Fbond.
\[F_{tot}=F_{a}+F_{bond}\]
dove Fa è la forza effettiva nella molla di ancoraggio e Fbond è la forza di aderenza che può essere ottenuta integrando la tensione di aderenza τb lungo la lunghezza della barra di armatura l.
\[F_{bond}=C_{s} \cdot \int_{0}^{l}\tau_{b}\left( x \right)dx\]
Cs è la circonferenza della barra di armatura.
La forza limite Flim è la forza massima nell'elemento della barra considerando la resistenza della barra e le condizioni di ancoraggio (aderenza tra calcestruzzo e armatura e ganci di ancoraggio, anelli, ecc.).
\[F_{lim}=min\left( F_{lim,bond}+F_{au},F_{u} \right)\]
\[F_{u}=f_{y,lim}\cdot A_{b}\]
\[F_{au}=\beta\cdot f_{y,lim}\cdot A_{b}\]
\[F_{lim,bond}=C_{s}\cdot l \cdot f_{bu}\]
dove Cs è la circonferenza della barra di armatura e l è la lunghezza dall'inizio della barra al punto di interesse.
\[ \textsf{\textit{\footnotesize{Fig. 66\qquad Definition of the limit force Flim}}}\]
\[F_{lim,2}=F_{lim,1}+F_{lim,add}\]
dove Flim,add è la forza aggiuntiva calcolata in funzione dell'ampiezza dell'angolo tra elementi adiacenti. Flim,2 deve essere sempre inferiore a Fu.
I tipi di ancoraggio disponibili in CSFM comprendono una barra diritta (ovvero senza riduzione dell'estremità di ancoraggio), gancio a 90 gradi, gancio a 180 gradi, aderenza perfetta e barra continua. Tutti questi tipi, insieme ai rispettivi coefficienti di ancoraggio β, sono mostrati nella Fig. 67 per l'armatura longitudinale. I valori dei coefficienti di ancoraggio adottati sono derivati dal confronto tra l'equazione della sezione AASHTO LRFD (2014) 5.11.2.1 e le equazioni della sezione AASHTO LRFD (2014) 5.11.2.4.1. È opportuno notare che, nonostante le diverse opzioni disponibili, CSFM distingue tre tipi di estremità di ancoraggio: (i) nessuna riduzione della lunghezza di ancoraggio, (ii) una riduzione del 30% della lunghezza di ancoraggio nel caso di ancoraggio normalizzato, e (iii) aderenza perfetta.
\[ \textsf{\textit{\footnotesize{Fig. 67\qquad Available anchorage types and respective anchorage coefficients for longitudinal reinforcing bars in CSFM:}}}\]
\[ \textsf{\textit{\footnotesize{(a) straight bar; (b) 90-degree hook; (c) 180-degree hook; (d) perfect bond; (e) continuous bar}}}\]
Il coefficiente di ancoraggio per le staffe (disponibile per l'elemento trave) è sempre β = 1,0.
Per conformarsi ad AASHTO, nel calcolo deve essere utilizzata la molla di ancoraggio. La molla di ancoraggio è modificata dal coefficiente β, pertanto l'utente deve utilizzare uno dei tipi di ancoraggio disponibili quando definisce le condizioni di inizio e fine dell'armatura.
6.4 Resistenza delle zone di appoggio e di ancoraggio – Aree parzialmente caricate
Nella progettazione di strutture in calcestruzzo, si incontrano due grandi gruppi di aree parzialmente caricate (PLA) – il primo comprende gli appoggi, mentre l'altro è costituito dalle zone di ancoraggio.
Secondo le normative attualmente vigenti per la progettazione di strutture in calcestruzzo armato, per gli appoggi devono essere considerati lo schiacciamento locale del calcestruzzo e le forze di trazione trasversale. Per un carico uniformemente distribuito su un'area, A1, la capacità a compressione del calcestruzzo può essere aumentata fino a due volte in funzione dell'area di distribuzione di progetto A2. Si veda l'Articolo 5.6.5 di AASHTO LRFD (2024).

\[ \textsf{\textit{\footnotesize{Fig. 68\qquad Partially loaded areas for bearings according to AASHTO LRFD (2024) Article 5.6.5}}}\]
Per le zone di ancoraggio post-tese, si deve seguire l'Articolo 5.8.4.4 di AASHTO LRFD (2024).
L'area parzialmente caricata deve essere sufficientemente armata con armatura trasversale progettata per trasmettere le forze di splitting che si verificano nella zona. In assenza dell'armatura trasversale richiesta, non è possibile considerare l'aumento della capacità a compressione del calcestruzzo.
Aree parzialmente caricate in CSFM
\[ \textsf{\textit{\footnotesize{Fig. 69\qquad Fictitious struts with concrete finite element mesh.}}}\]
Utilizzando CSFM, è possibile progettare e verificare strutture in calcestruzzo armato includendo l'influenza dell'aumento della resistenza a compressione del calcestruzzo nelle aree parzialmente caricate. Poiché CSFM è un modello a parete (2D) e le aree parzialmente caricate sono un problema spaziale (3D), è stato necessario trovare una soluzione che combinasse questi due diversi tipi di problemi (Fig. 69). Se la funzione "aree parzialmente caricate" è attivata, la geometria del cono ammissibile viene creata secondo ACI (Fig. 68). Tutte le interferenze geometriche vengono risolte completamente in 3D per la geometria dell'elemento in calcestruzzo specificata e le dimensioni di ciascuna PLA. Successivamente viene creato un modello di calcolo dell'area parzialmente caricata.
\[ \textsf{\textit{\footnotesize{Fig. 70\qquad Allowable cone geometries.}}}\]
La modifica del modello di materiale si è rivelata un approccio inadeguato, principalmente perché la mappatura delle proprietà sulla rete di elementi finiti è problematica. È stato determinato che un approccio indipendente dalla rete di elementi finiti rappresenta una soluzione più appropriata. Per la geometria del cono di compressione nota vengono creati puntoni fittizi perfettamente coerenti (Fig. 70 e Fig. 71). Questi puntoni hanno proprietà di materiale identiche al calcestruzzo utilizzato nel modello, incluso il diagramma tensione-deformazione. La forma del cono determina la direzione dei puntoni, che distribuisce progressivamente il carico dalla PLA all'area di distribuzione di progetto. La densità areale dei puntoni fittizi è variabile in ciascuna parte del cono e aggiunge un'area fittizia di calcestruzzo nella direzione del carico. Al livello dell'area caricata (A1), viene aggiunta un'area fittizia di calcestruzzo secondo il rapporto \(\sqrt{A_{1} \cdot A_{2}} - A_{real}\) (dove Areal è l'area dell'appoggio assunta nel modello di calcolo 2D), e questa area diminuisce linearmente fino a zero verso l'area di distribuzione di progetto (A2). Questa soluzione garantisce che la tensione di compressione nel calcestruzzo sia costante sull'intero volume del cono.
\[\rho \left( {\beta ,z} \right) = \left( {\sqrt {\frac{A_{2}}{A_{1}}} - \frac{A_{real}}{A_{1}}} \right)\,\cdot\,\left( {1 - \frac{z}{h}} \right)\,\cdot\,\frac{1}{{\cos \beta }}\]
\[ \textsf{\textit{\footnotesize{Fig. 71\qquad Fictitious struts in the computational model}}}\]
La resistenza dell'area parzialmente caricata viene aumentata in base al rapporto tra l'area di distribuzione di progetto e l'area caricata, come stabilito dall'Articolo 5.6.5 di AASHTO LRFD (2024). È opportuno ricordare che si tratta di un modello di calcolo che non può descrivere con precisione lo stato tensionale su un'area parzialmente caricata, il cui andamento reale è molto più complesso. Tuttavia, questa soluzione consente la corretta distribuzione del carico sull'intero modello rispettando la maggiore capacità portante dell'area parzialmente caricata. Inoltre, introduce correttamente le tensioni trasversali in questa zona per progettare correttamente l'armatura per le forze di splitting.
La tensione di appoggio ammissibile di 0.85fc' è riportata nell'Articolo 5.8.4.4 di AASHTO LRFD (2024). La densità è limitata in modo che non venga superata la doppia capacità massima indicata nella formula 5.6.5-3.
Per le zone di ancoraggio, la PLA viene utilizzata nell'applicazione nello stesso modo degli appoggi. Per questo motivo le tensioni di compressione nelle zone locali e globali definite negli Articoli 5.8.4.4 e 5.8.4.5 devono essere verificate manualmente. La PLA viene quindi utilizzata esclusivamente per evitare il superamento del criterio di deformazione nella zona locale e il conseguente arresto prematuro del calcolo. D'altra parte, l'armatura che resiste alle tensioni di bursting, spalling nel piano e alle tensioni di bordo nelle zone generali (definite nell'Articolo 5.8.4.5) può essere verificata direttamente e vantaggiosamente nell'applicazione.
6.5 Stato limite di esercizio
Le verifiche di esercizio vengono eseguite per la limitazione delle tensioni, l'ampiezza delle fessure e i limiti di deformazione. Le tensioni vengono verificate negli elementi in calcestruzzo e nell'armatura secondo AASHTO LRFD in modo analogo a quanto specificato per la Resistenza.
Limitazione delle tensioni
La tensione di compressione nel calcestruzzo viene valutata solo per gli elementi precompressi (quando il caso di carico di Precompressione è presente nel modello) come rapporto tra la massima tensione principale di compressione fc = σc2 ottenuta dall'analisi FE per l'esercizio e i valori limite, che sono definiti in base alla Tabella AASHTO LRFD 5.9.2.3.2a-1.

\[ \textsf{\textit{\footnotesize{Fig. 72\qquad Concrete compressive stress limits at service loads}}}\]
Nell'applicazione, Precompressione più carico permanente è trattato come carico Permanente, e Precompressione, carico permanente e transitorio come carico Totale.

\[ \textsf{\textit{\footnotesize{Fig. 73\qquad Serviceability combination types}}}\]
Inoltre, è sempre possibile eseguire un'analisi sia per gli effetti a breve termine che a lungo termine, utilizzando modelli di materiale che tengono conto o meno del fattore di viscosità — vedere la sezione "Modelli di materiale (AASHTO)".

\[ \textsf{\textit{\footnotesize{Fig. 74\qquad Serviceability material models}}}\]
Deformazione
Le deformazioni istantanee e le deformazioni totali vengono valutate per ogni combinazione in cui la valutazione della deformazione è abilitata.
- Per le deformazioni istantanee, viene utilizzato il modulo di elasticità Ec secondo AASHTO LRFD (2024) articolo 5.4.2.4.
- Per le deformazioni totali, viene utilizzato il modulo di elasticità efficace Ec,eff secondo AASHTO LRFD (2024) articolo C5.12.5.3.6.
Vedere il capitolo 'Modelli di materiale (AASHTO) - Calcestruzzo – Esercizio' in questo documento.
La verifica della deformazione è abilitata nella barra degli strumenti superiore. L'utente imposta i valori limite di deformazione secondo AASHTO LRFD (2024) articolo 2.5.2.6.2, in funzione del tipo di elemento analizzato.

\[ \textsf{\textit{\footnotesize{Fig. 75\qquad Maximum allowable deflection value}}}\]
Le deformazioni alle estremità tagliate non possono essere verificate.
Ampiezza delle fessure
Le ampiezze e le orientazioni delle fessure vengono calcolate solo per gli effetti a lungo termine (utilizzando Ec,eff secondo AASHTO LRFD (2024) articolo C5.12.5.3.6) per le combinazioni in cui la valutazione dell'ampiezza delle fessure è abilitata. Le verifiche basate sui valori limite definiti dall'utente sono le seguenti:
\[\frac{w}{w_{lim}}\]
dove:
w ampiezza della fessura calcolata dall'analisi FE,
wlim valore limite dell'ampiezza della fessura definito dall'utente.
Il valore limite wlim deve essere determinato in base al tipo di elemento e alla classe di esposizione in conformità con AASHTO LRFD (2024) articolo 5.6.7 e relativo commento.
Esistono due metodi per il calcolo delle ampiezze delle fessure (fessurazione stabilizzata e non stabilizzata). Nel caso generale (fessurazione stabilizzata), l'ampiezza della fessura viene calcolata integrando le deformazioni sugli elementi 1D delle barre di armatura. La direzione della fessura viene quindi calcolata dai tre punti di integrazione più vicini (dal centro del dato elemento finito 1D dell'armatura) degli elementi 2D in calcestruzzo. Sebbene questo approccio al calcolo delle direzioni delle fessure non corrisponda alla posizione reale delle fessure, fornisce comunque valori rappresentativi che portano a risultati di ampiezza delle fessure confrontabili con i valori di ampiezza delle fessure richiesti dalla normativa nella posizione della barra di armatura.
7 Verifiche strutturali secondo la norma australiana AS 3600 (2018)
La valutazione della struttura mediante CSFM viene eseguita con due analisi distinte: una per le combinazioni di carico di esercizio e una per quelle di resistenza. L'analisi di esercizio presuppone che il comportamento sotto i carichi amplificati sia soddisfacente e che le condizioni di snervamento del materiale non vengano raggiunte ai livelli di carico di esercizio. Questo approccio consente l'utilizzo di modelli costitutivi semplificati (con un ramo lineare del diagramma tensione-deformazione del calcestruzzo) per l'analisi di esercizio, al fine di migliorare la stabilità numerica e la velocità di calcolo.
Il CSFM è un metodo di analisi strutturale che soddisfa le regole generali dei capitoli 6.1.1 e 6.1.2 ed è definito come (f) analisi non lineare delle tensioni nel capitolo 6.1.3 - e ulteriormente nel capitolo 6.6.
L'analisi mediante CSFM tiene conto di tutti gli effetti non lineari e anelastici rilevanti (ad eccezione del ritiro) definiti in 6.6.3.
Al fine di soddisfare i requisiti delle sezioni 6.6.4 e 6.6.5 - ulteriori informazioni sono disponibili in AS3600:2018 Sup 1:2022 Sezione C6.6 - sono state condotte verifiche e validazioni del metodo presso diverse università. I singoli articoli che riassumono i risultati delle verifiche e delle validazioni sono disponibili al seguente link.
Poiché IDEA StatiCa Detail è un programma di progettazione pratico, per i calcoli viene utilizzata la resistenza cilindrica caratteristica a compressione amplificata a 28 giorni f'c, come descritto nel capitolo successivo.
7.1 Modelli di materiale (AS 3600)
Calcestruzzo - Resistenza
Il modello di calcestruzzo implementato per i calcoli di resistenza nel CSFM è basato sulla curva tensione-deformazione parabolico-plastica. La resistenza a trazione è trascurata, come avviene nel classico progetto di calcestruzzo armato.
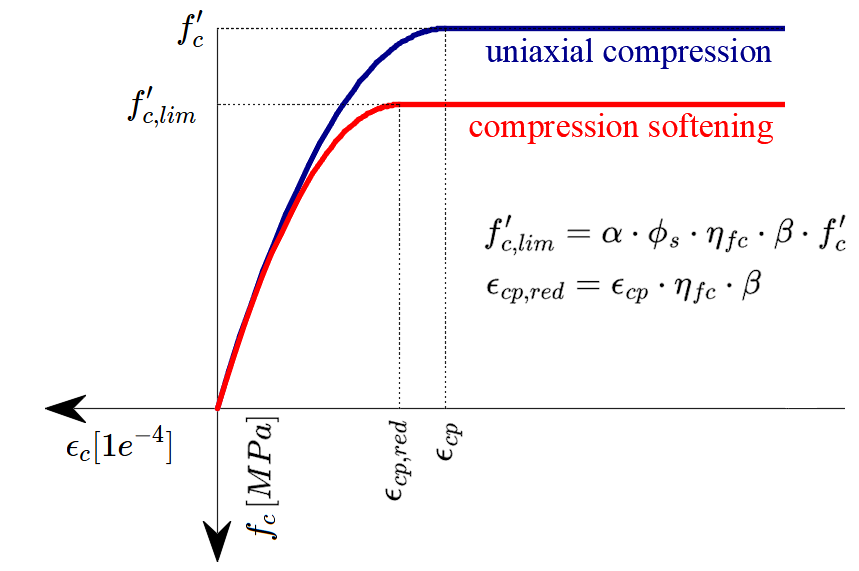
\[ \textsf{\textit{\footnotesize{Fig. 76\qquad The stress-strain diagram of concrete for Strength analysis}}}\]
L'implementazione del CSFM in IDEA StatiCa Detail non considera un criterio di rottura esplicito in termini di deformazioni per il calcestruzzo compresso (ovvero, dopo il raggiungimento della tensione di picco, considera un ramo plastico con εc0 con valore massimo del 5%, mentre AS 3600 Cl. 8.3.1 assume una deformazione ultima inferiore allo 0,3%). Questa semplificazione non consente di verificare la capacità deformativa delle strutture che collassano per compressione. Tuttavia, la resistenza è correttamente prevista quando, in aggiunta al fattore del calcestruzzo fessurato (kc2 definito in (Fig. 77)), l'aumento della fragilità del calcestruzzo all'aumentare della sua resistenza è considerato tramite il fattore di riduzione \(\eta_{fc}\) definito nel fib Model Code 2010 come segue:
\[f'_{c,lim}=\alpha_{2}\cdot\phi_{s}\cdot \beta \cdot \eta_{fc}\cdot f'_{c}\]
\[{\eta _{fc}} = {\left( {\frac{{30}}{{{f'_{c}}}}} \right)^{\frac{1}{3}}} \le 1\]
dove:
α2 è il fattore di riduzione della resistenza a compressione del calcestruzzo definito in AS 3600 Cl. 8.3.1
Quando si utilizza un diagramma tensione-deformazione a parabola-rettangolo, è necessario ridurre la tensione massima di compressione di questo fattore. Ciò media la distribuzione delle tensioni nella zona compressa in modo tale che la resistenza a compressione risultante sia inferiore o uguale alla resistenza a compressione calcolata utilizzando un diagramma tensione-deformazione con un ramo plastico decrescente. Un approccio analogo è definito per il blocco rettangolare di tensioni nel Capitolo 8.1.3.
Φs è il fattore di riduzione della tensione per il calcestruzzo. Il valore predefinito è impostato secondo AS 3600 Tabella 2.2.3.
β è il fattore di riduzione dovuto alla presenza di fessurazione trasversale (denominato anche kc2 in questo testo)
f'c è la resistenza cilindrica del calcestruzzo (in MPa per la definizione di \( \eta_{fc} \)).
\[ \textsf{\textit{\footnotesize{Fig. 77\qquad The compression softening law.}}}\]
β è un fattore di riduzione basato sugli stessi principi di un fattore di resistenza a compressione efficace definito nel Capitolo 2.2.3. La letteratura sulla base della quale questo fattore è determinato può essere trovata (incluso il contesto della norma AS3600) in AS3600:2018 Sup 1:2022 CL. C2.2.3.
Calcestruzzo – Esercizio
L'analisi agli stati limite di esercizio contiene alcune semplificazioni dei modelli costitutivi utilizzati per l'analisi di resistenza. Il ramo plastico della curva tensione-deformazione del calcestruzzo compresso è trascurato, mentre il ramo elastico è lineare e infinito. La legge di ammorbidimento a compressione non è considerata. Queste semplificazioni migliorano la stabilità numerica e la velocità di calcolo e non riducono la generalità della soluzione fintanto che i limiti di tensione del materiale risultante agli stati limite di esercizio siano chiaramente al di sotto dei loro punti di snervamento (come richiesto da AS3600). Pertanto, i modelli semplificati utilizzati per l'esercizio sono validi solo se tutti i requisiti di verifica sono soddisfatti.
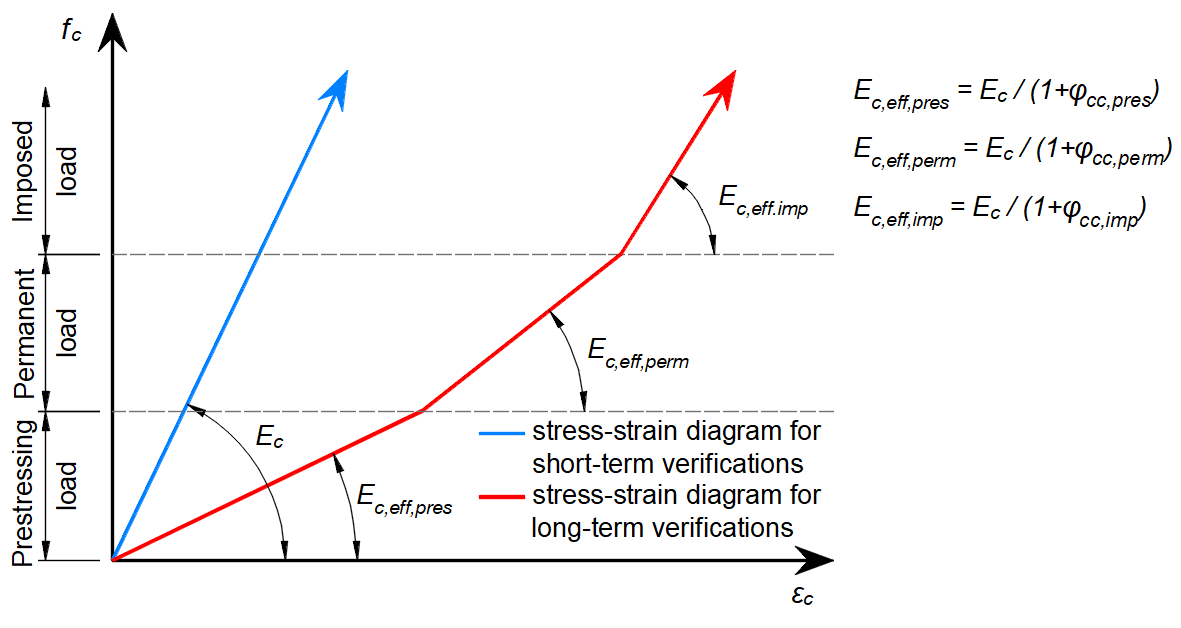
\[ \textsf{\textit{\footnotesize{Fig. 78\qquad Concrete stress-strain diagrams implemented for serviceability analysis: short- and long-term verifications.}}}\]
Effetti a lungo termine
Nell'analisi agli stati limite di esercizio, gli effetti a lungo termine del calcestruzzo sono considerati utilizzando il coefficiente di viscosità di progetto secondo AS 3600 CL 3.1.8 (φcc, assunto pari a 2,5 per impostazione predefinita), che modifica il modulo di elasticità secante del calcestruzzo (Ec) come segue:
\[E_{c,eff} = \frac{E_{c}}{1+\varphi_{cc}}\]
Gli incrementi di carico sono calcolati sequenzialmente nell'ordine: Precompressione - Permanente - Variabile, utilizzando il modulo di elasticità efficace appropriato per ciascun incremento come mostrato in Fig. 78. I fattori di viscosità sono definiti dall'utente nelle proprietà del materiale e devono essere calcolati secondo AS 3600 CL 3.1.8.3
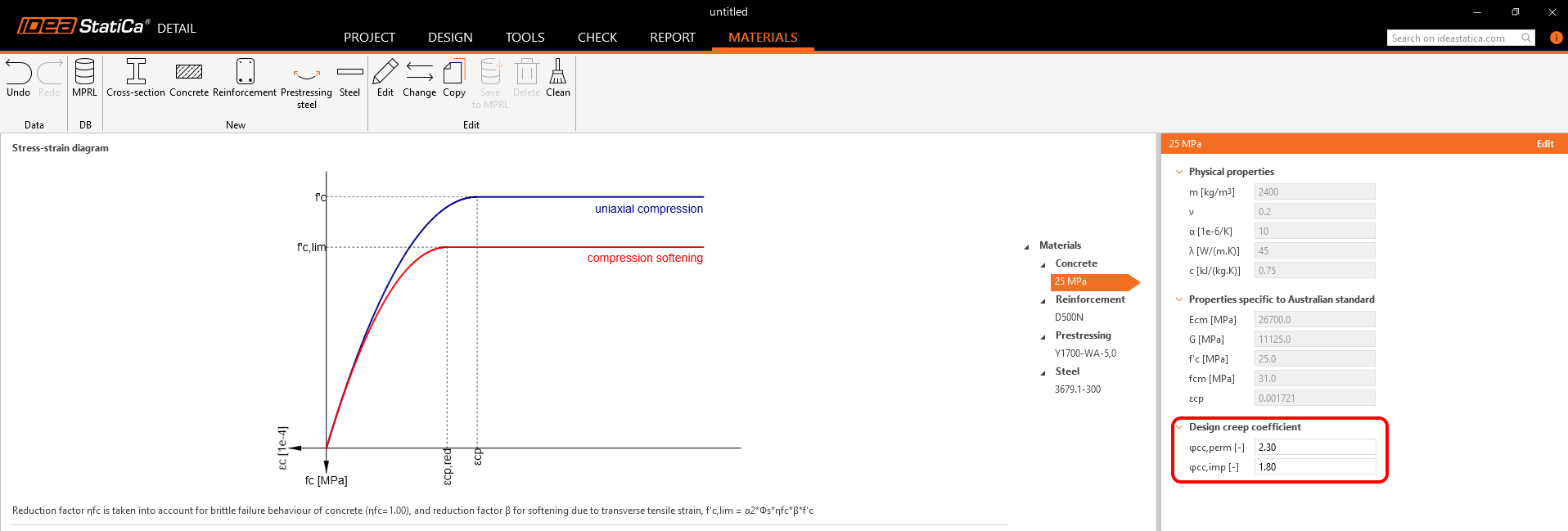
\[ \textsf{\textit{\footnotesize{Fig. 79\qquad Definition of the design creep factor}}}\]
Effetti a breve termine
Per eseguire le verifiche a breve termine, viene effettuato un ulteriore calcolo in cui tutti i carichi sono calcolati senza il fattore dipendente dal tempo per i carichi permanenti. Entrambi i calcoli per le verifiche a lungo e breve termine sono illustrati in Fig. 78.
Armatura
Si considera un diagramma tensione-deformazione perfettamente elasto-plastico con un punto di snervamento definito per l'armatura non precompressa, vedere AS 3600 Sezione 3.2. La definizione di questo diagramma richiede solo la conoscenza delle proprietà di base dell'armatura – la resistenza e il modulo di elasticità.
Il diagramma tensione-deformazione dell'armatura può essere definito anche dall'utente, ma in questo caso è impossibile assumere l'effetto di irrigidimento a trazione (è impossibile calcolare l'ampiezza delle fessure).
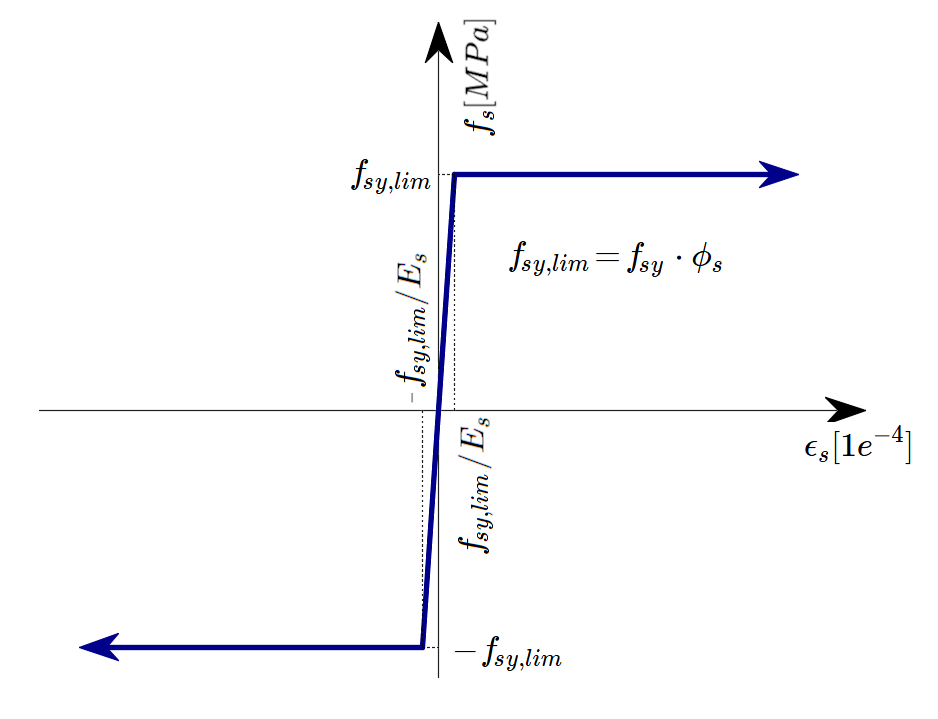
\[ \textsf{\textit{\footnotesize{Fig. 80 \qquad Stress-strain diagram of reinforcement}}}\]
dove:
Φs è il fattore di riduzione della resistenza per l'armatura. Il valore predefinito è impostato secondo AS 3600 Tabella 2.2.3.
fy è la tensione di snervamento dell'armatura
Es modulo di elasticità dell'armatura
L'irrigidimento a trazione (Fig. 81) è considerato automaticamente modificando la relazione tensione-deformazione di input della barra di armatura nuda al fine di cogliere la rigidezza media delle barre inglobate nel calcestruzzo (εm).
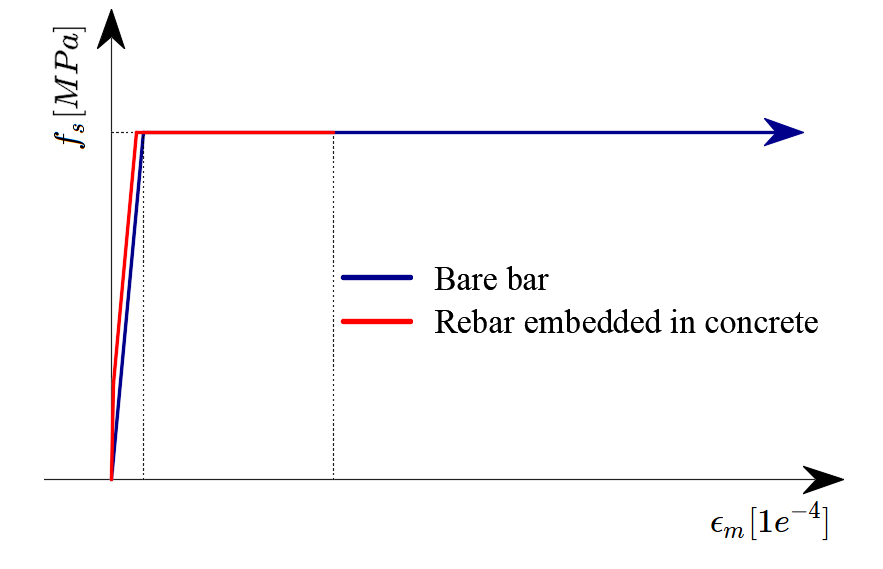
\[ \textsf{\textit{\footnotesize{Fig. 81\qquad Scheme of tension stiffening.}}}\]
7.2 Riduzione delle tensioni e fattori di carico
Il Metodo del Campo di Tensioni Compatibile è conforme ai moderni codici di progettazione. Poiché i modelli di calcolo utilizzano solo proprietà dei materiali standard, il formato del coefficiente di sicurezza parziale prescritto nei codici di progettazione può essere applicato senza alcun adattamento. In questo modo, i carichi di input sono amplificati e le proprietà caratteristiche dei materiali sono ridotte utilizzando i rispettivi fattori di riduzione delle tensioni, esattamente come nell'analisi convenzionale del calcestruzzo.
I valori dei fattori di riduzione delle tensioni sono prescritti in AUS 3600 Cl. 2.2.3. I valori predefiniti per il calcestruzzo e l'armatura sono impostati secondo la Tabella 2.2.3
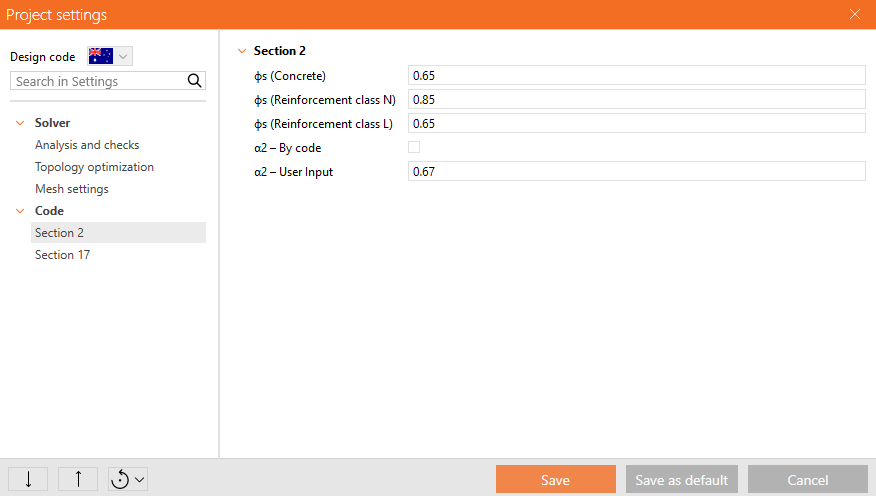
\[ \textsf{\textit{\footnotesize{Fig. 82\qquad The setting of stress reduction factors in IDEA StatiCa Detail.}}}\]
I fattori di carico per le combinazioni di Resistenza devono essere definiti secondo AS 3600 Cl. 4.2.2. I fattori di carico per le combinazioni di Esercizio devono essere determinati secondo la Tabella 4.1. Per tutti i modelli, i fattori di carico sono già predefiniti.
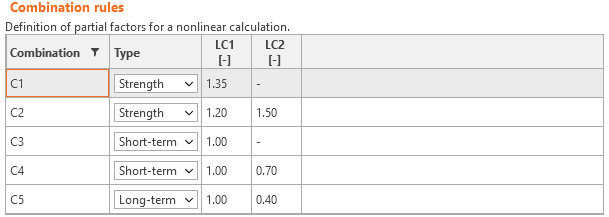
\[ \textsf{\textit{\footnotesize{Fig. 83\qquad The setting of load factors in Idea StatiCa Detail.}}}\]
7.3 Verifiche di resistenza e ancoraggio
Le diverse verifiche richieste dalla AS 3600 sono valutate sulla base dei risultati diretti forniti dal modello. Le verifiche vengono eseguite per la resistenza del calcestruzzo, la resistenza dell'armatura e l'ancoraggio (tensioni tangenziali di aderenza).
La resistenza del calcestruzzo a compressione è valutata come il rapporto tra la massima tensione principale di compressione fc (anche σ2 nei risultati ausiliari) ottenuta dall'analisi FE e il valore limite f'c,lim.
La resistenza dell'armatura è valutata sia a trazione che a compressione come il rapporto tra la tensione nell'armatura alle fessure fs e il valore limite specificato fsy,lim.
La tensione tangenziale di aderenza è valutata indipendentemente come il rapporto tra la tensione di aderenza τb calcolata dall'analisi FE e la tensione di aderenza ultima di progetto fbu.
Per la determinazione della tensione di aderenza ultima di progetto fbu, nell'applicazione viene considerata la formula C13.1.2.2 definita in AS3600:2018 Sup 1:2022.
\[f_{bu}=\frac{k_{2}}{k_{1} \cdot k_{3}} \cdot (0.5 \cdot \sqrt{f'_{c}})\]
Dove f'c ≤ 65 MPa (nella formula è in MPa), e i fattori k sono determinati dalla AS 3600 Cl. 13.1.2.2 come segue:
k3 = 0.7 (valore conservativo per tutta l'armatura)
k2 = (132 - db) / 100 (db è il diametro della barra in millimetri)
= 1.3 per una barra orizzontale con più di 300 mm di calcestruzzo gettato al di sotto della barra, oppure 1.0 negli altri casi
k1 è derivato automaticamente dalla posizione dell'armatura nel modello e dalla direzione del getto di calcestruzzo, che può essere impostata nell'applicazione per ciascun elemento di progetto come segue.
\[ \textsf{\textit{\footnotesize{Fig. 84\qquad Direction of concreting}}}\]
La lunghezza di sviluppo di base Lsy,tb è calcolata secondo la formula 13.1.2.2 della AS 3600 come segue:
\[L_{sy,tb}=\frac{0.5\cdot k_{1}\cdot k_{3}\cdot f_{sy}\cdot d_{b}}{k_{2}\cdot \sqrt{f'_{c}}}\ge 29 \cdot k_{1}\cdot d_{b}\]
Come si può osservare nella formula, la lunghezza di sviluppo di base Lsy,tb è limitata inferiormente, e pertanto la tensione di aderenza ultima di progetto fbu deve essere limitata allo stesso modo nell'applicazione, per cui vale quanto segue:
\[f_{bu}\le \frac{f_{sy}}{116 \cdot k_{1}} \]
Dove fsy è in MPa.
La derivazione della limitazione di fbu è la seguente:
\[f_{bu}= \frac{f_{sy}\cdot A_{s}}{ \pi \cdot d_{b} \cdot L_{sy,tb}}=\frac{f_{sy}\cdot \pi \cdot d_{b}^{2}}{4 \cdot \pi \cdot d_{b} \cdot 29 \cdot k{1} \cdot d_{b}} =\frac{f_{sy}}{116 \cdot k_{1}} \]
È disponibile anche un'opzione per modellare barre lisce. Ulteriori informazioni sono disponibili qui: Barre lisce in Detail
Forza totale Ftot e forza limite Flim
La forza totale Ftot è un risultato dell'analisi agli elementi finiti e può essere definita in due modi.
\[F_{tot}=A_{s} \cdot f_{s}\]
dove As è l'area della barra di armatura e fs è la tensione nella barra.
Oppure come somma della forza di ancoraggio Fa e della forza di aderenza Fbond.
\[F_{tot}=F_{a}+F_{bond}\]
dove Fa è la forza effettiva nella molla di ancoraggio e Fbond è la forza di aderenza che può essere ottenuta integrando la tensione di aderenza τb lungo la lunghezza della barra di armatura l.
\[F_{bond}=C_{s} \cdot \int_{0}^{l}\tau_{b}\left( x \right)dx\]
Cs è la circonferenza della barra di armatura.
La forza limite Flim è la forza massima nell'elemento della barra considerando la resistenza della barra e le condizioni di ancoraggio (aderenza tra calcestruzzo e armatura e ganci di ancoraggio, anelli, ecc.).
\[F_{lim}=min\left( F_{lim,bond}+F_{au},F_{u} \right)\]
\[F_{u}=f_{y,lim}\cdot A_{s}\]
\[F_{au}=\beta\cdot f_{y,lim}\cdot A_{s}\]
\[F_{lim,bond}=C_{s}\cdot l \cdot f_{bu}\]
dove Cs è la circonferenza della barra di armatura e l è la lunghezza dall'inizio della barra al punto di interesse.
\[ \textsf{\textit{\footnotesize{Fig. 85\qquad Definition of the limit force Flim}}}\]
\[F_{lim,2}=F_{lim,1}+F_{lim,add}\]
dove Flim,add è la forza aggiuntiva calcolata in funzione dell'ampiezza dell'angolo tra elementi adiacenti. Flim,2 deve essere sempre inferiore a Fu.
I tipi di ancoraggio disponibili in CSFM comprendono: barra diritta (ovvero senza riduzione dell'estremità di ancoraggio), gancio standard, uncino standard, aderenza perfetta e barra continua. Tutti questi tipi, insieme ai rispettivi coefficienti di ancoraggio β, sono mostrati nella Fig. 86 per l'armatura longitudinale. I valori dei coefficienti di ancoraggio adottati sono derivati dalla AS 3600 Cl. 13.1.2. Si noti che il CSFM distingue tre tipi di estremità di ancoraggio: (i) nessuna riduzione della lunghezza di ancoraggio, (ii) una riduzione del 50% della lunghezza di ancoraggio nel caso di ancoraggio normalizzato, e (iii) aderenza perfetta.

\[ \textsf{\textit{\footnotesize{Fig. 86\qquad Available anchorage types and respective anchorage coefficients for longitudinal reinforcing bars in CSFM:}}}\]
\[ \textsf{\textit{\footnotesize{(a) straight bar; (b) Standard cog; (c) Standard hook; (d) perfect bond; (e) continuous bar}}}\]
Il coefficiente di ancoraggio per le staffe è sempre β = 1.0.
Al fine di conformarsi alla AS 3600, nel calcolo deve essere utilizzata la molla di ancoraggio; la molla di ancoraggio è modificata dal coefficiente β, pertanto l'utente deve utilizzare uno dei tipi di ancoraggio disponibili quando definisce le condizioni di inizio e fine dell'armatura.
7.4 Verifiche agli stati limite di esercizio
Le verifiche agli stati limite di esercizio vengono eseguite per la larghezza delle fessure e i limiti di freccia.
Freccia
In base al tipo di combinazione selezionata (a lungo termine o a breve termine), viene valutata la freccia a lungo termine o a breve termine. Il valore massimo ammissibile della freccia deve essere determinato dall'utente e deve essere considerato in conformità con AS 3600 Cl. 2.3.2.

\[ \textsf{\textit{\footnotesize{Fig. 87\qquad Maximum allowable deflection values}}}\]
Nell'applicazione è possibile visualizzare separatamente le frecce dovute al carico permanente ΔPL e al carico variabile ΔIL, nonché la freccia totale ΔTot (permanente + variabile), visualizzando al contempo la forma deformata.
Le frecce alle estremità rifilate non possono essere verificate.
Larghezza delle fessure
Le larghezze e le orientazioni delle fessure vengono calcolate per le combinazioni di esercizio a breve termine o a lungo termine. Il metodo di calcolo diretto delle larghezze delle fessure nell'applicazione è conforme (basato su) al metodo indicato in AS 3600 8.6.2.3.
Le verifiche sono presentate come segue:
\[\frac{w}{w_{lim}}\]
dove:
w larghezza della fessura a breve o lungo termine calcolata tramite analisi FE,
wlim valore limite della larghezza della fessura definito dall'utente.
Le larghezze massime raccomandate delle fessure sono riportate in AS3600:2018 Sup 1:2022 Tabella C2.3.3.1.
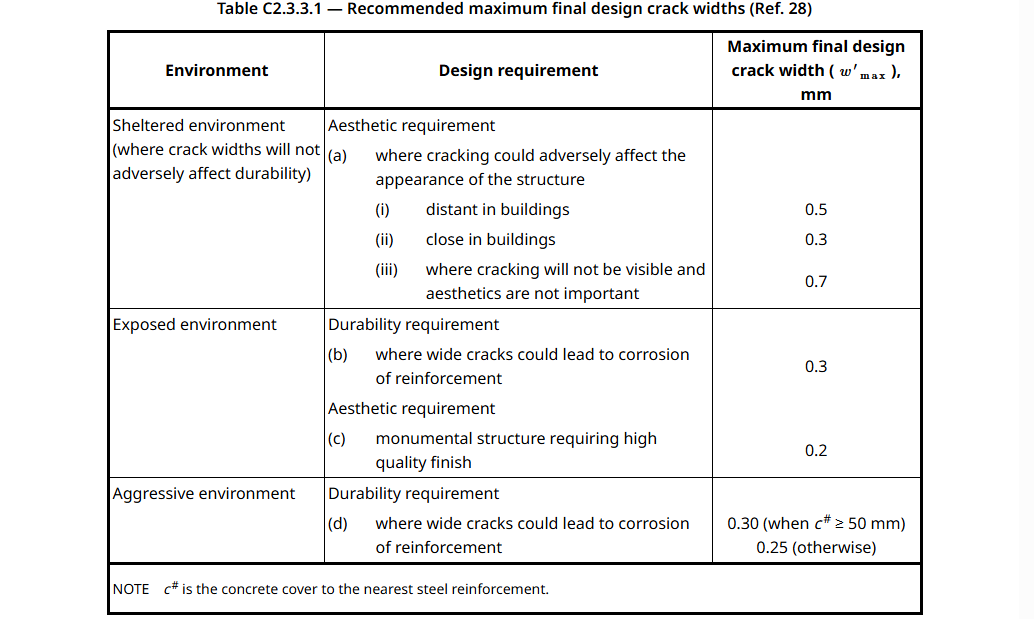
\[ \textsf{\textit{\footnotesize{Fig. 88\qquad Recommended final design crack widths}}}\]
In alternativa, secondo AS3600:2018 Sup 1:2022 Cl. C8.6.1 - Per le strutture soggette ai carichi di esercizio a lungo termine, i valori raccomandati per wlim sono i seguenti:
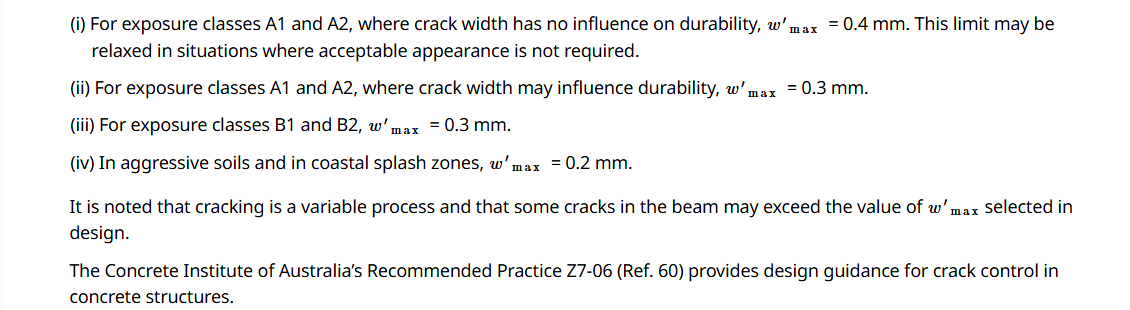
\[ \textsf{\textit{\footnotesize{Fig. 89\qquad Recommended values for the limit value of the crack width for beams based on exposure classes}}}\]
Esistono due metodi per il calcolo delle larghezze delle fessure (fessurazione stabilizzata e non stabilizzata). Nel caso generale (fessurazione stabilizzata), la larghezza della fessura viene calcolata integrando le deformazioni sugli elementi 1D delle barre di armatura. La direzione della fessura viene quindi calcolata dai tre punti di integrazione più vicini (dal centro del dato elemento finito 1D dell'armatura) degli elementi 2D in calcestruzzo. Sebbene questo approccio al calcolo delle direzioni delle fessure non corrisponda alla posizione reale delle fessure, fornisce comunque valori rappresentativi che portano a risultati di larghezza delle fessure confrontabili con i valori di larghezza delle fessure richiesti dalla normativa nella posizione della barra di armatura.
8 Precompressione - descrizione del modello
8 Introduzione e modelli dei materiali
Il Metodo del Campo di Tensioni Compatibile (CSFM) è un metodo computazionale basato su tensioni piane 2D in cui il calcestruzzo è modellato mediante elementi finiti 2D ai quali sono collegati elementi di armatura 1D tramite vincoli. Al modello possono essere aggiunti anche tipi speciali di elementi 1D che rappresentano l'armatura di precompressione aderente, che può essere modellata come pre-tesa e post-tesa.
L'armatura di precompressione è modellata in modo analogo all'armatura convenzionale mediante elementi lineari che trasmettono la forza assiale. Ogni singolo elemento di armatura di precompressione è caratterizzato dalla propria area e dalle proprietà del materiale. Tali proprietà sono definite dalla curva caratteristica del materiale secondo la normativa utilizzata (EN 1992-1-1, ACI 318-19, ecc.)
EUROCODE
Diagramma tensione-deformazione dell'armatura di precompressione: a) Diagramma tensione-deformazione come definito in EN 1992-1-1; b) deformazione iniziale per l'armatura pre-tesa
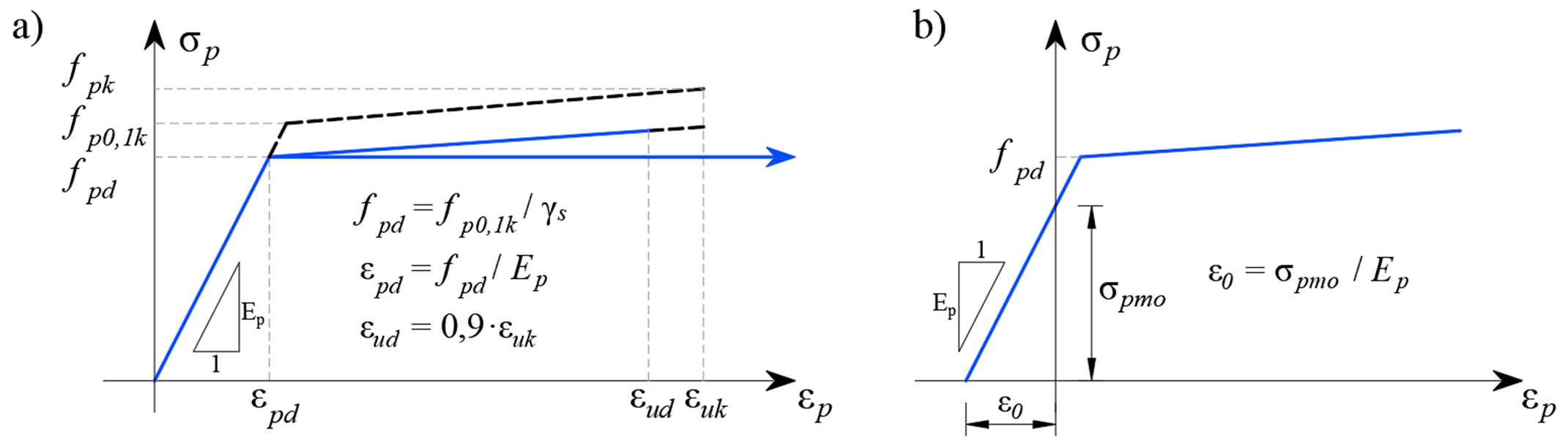
ACI
Diagramma tensione-deformazione dell'armatura di precompressione: a) Diagramma tensione-deformazione; b) deformazione iniziale per l'armatura pre-tesa
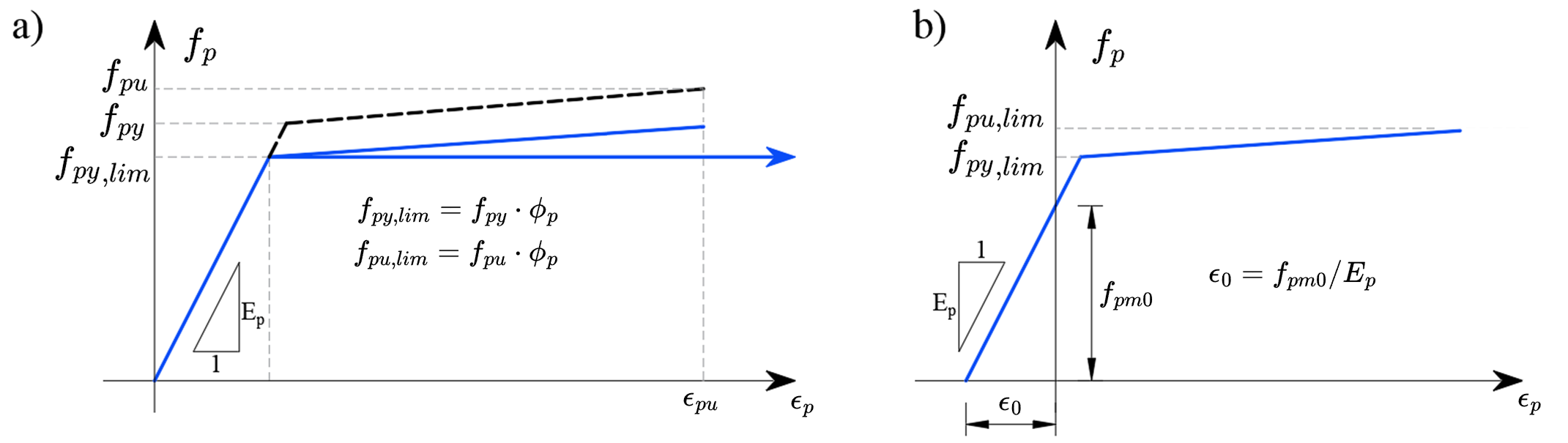
Gli elementi di armatura sono collegati tramite un modello di aderenza agli elementi 2D del modello in calcestruzzo nello stesso modo dell'armatura ordinaria in calcestruzzo.
- Leggi Tipi di elementi finiti
Gli elementi del modello di aderenza consentono la deformazione relativa dell'armatura di precompressione e del calcestruzzo con appropriate caratteristiche non lineari. Ciò modella correttamente la coesione dell'armatura con il calcestruzzo e anche il modello di ancoraggio dell'armatura pre-tesa. Le modifiche terminali dell'armatura post-tesa, ad esempio la piastra di ancoraggio, sono modellate da un elemento con una rigidezza corrispondente all'ancorante all'estremità dell'armatura di precompressione, e la forza di precompressione terminale è applicata come carico areale nel modello in calcestruzzo su un'area corrispondente alla dimensione della piastra di ancoraggio. Il modello non è in grado di descrivere correttamente lo stato di tensione triassiale locale nella regione sub-ancorante, e questa regione deve essere considerata separatamente.
L'irrigidimento a trazione dell'armatura dovuto alle interazioni con il calcestruzzo non è considerato nell'armatura di precompressione poiché si assume che il calcestruzzo nelle vicinanze dell'armatura di precompressione sia in compressione.
Armatura pre-tesa
L'armatura pre-tesa viene precompressa prima del getto dell'elemento; l'armatura di precompressione è quasi sempre disposta in linea retta, pertanto non si verificano perdite per attrito. Una volta raggiunta la resistenza richiesta del calcestruzzo, l'armatura viene rilasciata dai blocchi di ancoraggio, attivando così l'armatura precompressa e trasferendo le forze dall'armatura al calcestruzzo. Questo effetto è fisicamente equivalente al raffreddamento dell'armatura ed è modellato mediante una deformazione iniziale analoga a quella del carico termico. Ciò fornisce un diagramma tensione-deformazione dell'armatura precompressa come mostrato nella figura precedente in b). Il modello computazionale calcola automaticamente la risposta deformativa della struttura alla precompressione applicata, determinando quindi direttamente le perdite di precompressione per deformazione elastica dell'elemento.
Poiché la forza di precompressione è nota, e quindi anche la tensione di precompressione σpmo, il diagramma del materiale dell'armatura è utilizzato per la dipendenza della tensione dalla deformazione e può essere scritto come:
\[{{σ}_{p}}=~{{f}}({{ε}}-{{ε}_{0}})\]
Assumendo che la precompressione nell'armatura sia inferiore alla tensione di snervamento (ovvero che siano soddisfatte le condizioni definite in EN 1992-1-1, capitolo 5.10.3), la deformazione iniziale può essere calcolata anche come:
\[{{ε}_{0}}=\frac{{{σ}_{pm0}}}{{{E}_{p}}}\]
ε0 - deformazione iniziale da precompressione
σpm0 - tensione immediatamente prima del rilascio
Ep - modulo di elasticità dell'armatura di precompressione
L'armatura pre-tesa è specifica in quanto il suo ancoraggio alle estremità è realizzato mediante diversi meccanismi: adesione dell'armatura e del calcestruzzo a livello molecolare, attrito generato all'interfaccia tra la superficie dell'armatura e il calcestruzzo, spinta meccanica dell'armatura elicoidale nel calcestruzzo e aumento del diametro dell'armatura di precompressione noto come meccanismo a cuneo o effetto Hoyer. I suddetti effetti sono inclusi nel modello computazionale CSFM modificando le proprietà del modello di ancoraggio nella regione terminale dell'armatura pre-tesa.
Interazione tra armatura pre-tesa e calcestruzzo: a) armatura elicoidale che si spinge nel calcestruzzo; b) effetto Hoyer
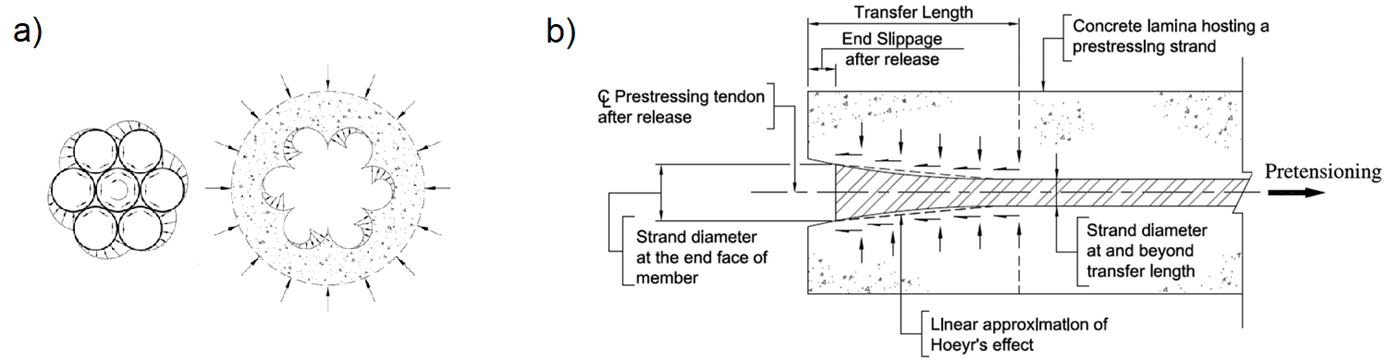
Armatura post-tesa
L'armatura post-tesa viene precompressa dopo il getto della struttura. Il dispositivo di precompressione è supportato direttamente nella struttura, eliminando così le perdite dovute alla deformazione elastica della struttura per effetto della precompressione. Una volta raggiunta la forza di precompressione desiderata, l'armatura viene ancorata e successivamente i canali dei cavi vengono iniettati con malta, ottenendo così l'aderenza dell'armatura con la struttura. Nella modellazione dell'armatura post-tesa, il calcolo è quindi suddiviso in più fasi di carico: precompressione, applicazione degli altri carichi permanenti e applicazione dei carichi variabili.
Rete di elementi finiti in calcestruzzo con elementi di armatura di precompressione 1D collegati:
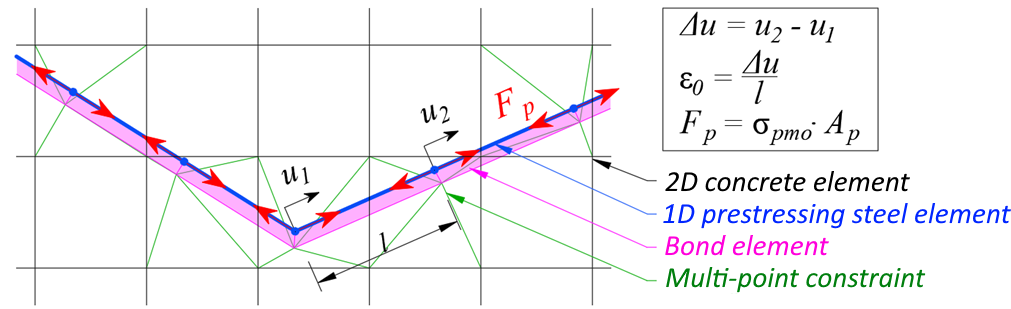
Fase di carico "precompressione"
Durante la precompressione dell'armatura, la rigidezza dell'armatura non è incorporata nella rigidezza della struttura. In questa fase di carico, la rigidezza dell'elemento lineare non è considerata nel modello; gli elementi di armatura sono sostituiti da un carico equivalente corrispondente alla tensione di precompressione e all'area dell'armatura come mostrato nella figura precedente. Dopo aver raggiunto il carico totale dalla precompressione e la convergenza di questa fase di carico, viene letta la deformazione dello specifico elemento lineare; sulla base della deformazione viene determinata la deformazione iniziale ε0 dei singoli elementi lineari dell'armatura di precompressione.
La tensione di precompressione può essere definita manualmente lungo la lunghezza dell'armatura oppure calcolata automaticamente in base alla geometria dell'armatura. Se si sceglie il calcolo automatico delle perdite, vengono considerate le perdite per attrito (secondo EN 1992-1-1, 5.10.5.2, o ACI 318-19, 20.3.2) e lo scorrimento dell'armatura (pressione dei cunei di ancoraggio) durante l'ancoraggio. Poiché tutta l'armatura di precompressione viene applicata in un'unica fase, le perdite per precompressione successiva non sono considerate.
Fasi di carico successive con armatura di precompressione attiva
Nelle fasi di carico successive (applicazione degli altri carichi permanenti e variabili) si segue la stessa procedura dell'armatura pre-tesa. Viene considerata la piena rigidezza dell'armatura precompressa, viene considerata l'aderenza tra l'armatura e il calcestruzzo circostante, e il diagramma tensione-deformazione dell'armatura precompressa è modificato dalla deformazione iniziale ε0. Tale deformazione è diversa per ciascun elemento ed è stata ottenuta dalla precedente fase di carico "precompressione". Grazie all'aderenza dell'armatura con il calcestruzzo, la variazione della precompressione dovuta alla deformazione elastica della struttura per effetto del carico esterno è correttamente considerata nel modello.
Riferimenti
ACI Committee 318. 2019. Building Code Requirements for Structural Concrete (ACI 318-19) and Commentary. Farmington Hills, MI: American Concrete Institute.
Alvarez, Manuel. 1998. Einfluss des Verbundverhaltens auf das Verformungsvermögen von Stahlbeton. IBK Bericht 236. Basel: Institut für Baustatik und Konstruktion, ETH Zurich, Birkhäuser Verlag.
Beeby, A. W. 1979. "The Prediction of Crack Widths in Hardened Concrete." The Structural Engineer 57A (1): 9–17.
Broms, Bengt B. 1965. "Crack Width and Crack Spacing In Reinforced Concrete Members." ACI Journal Proceedings 62 (10): 1237–56. https://doi.org/10.14359/7742.
Burns, C.. 2012. "Serviceability Analysis of Reinforced Concrete Members Based on the Tension Chord Model." IBK Report Nr. 342, Zurich, Switzerland: ETH Zurich.
Crisfield, M. A. 1997. Non-Linear Finite Element Analysis of Solids and Structures. Wiley.
European Committee for Standardization (CEN). 2015. 1 Eurocode 2: Design of concrete structures - Part 1-1: General rules and rules for buildings. Brussels: CEN, 2005.
Fernández Ruiz, M., and A. Muttoni. 2007. "On Development of Suitable Stress Fields for Structural Concrete." ACI Structural Journal 104 (4): 495–502.
Kaufmann, W., J. Mata-Falcón, M. Weber, T. Galkovski, D. Thong Tran, J. Kabelac, M. Konecny, J. Navratil, M. Cihal, and P. Komarkova. 2020. "Compatible Stress Field Design Of Structural Concrete. Berlin, Germany."AZ Druck und Datentechnik GmbH, ISBN 978-3-906916-95-8.
Kaufmann, W., and P. Marti. 1998. "Structural Concrete: Cracked Membrane Model." Journal of Structural Engineering 124 (12): 1467–75. https://doi.org/10.1061/(ASCE)0733-9445(1998)124:12(1467).
Kaufmann, W.. 1998. "Strength and Deformations of Structural Concrete Subjected to In-Plane Shear and Normal Forces." Doctoral dissertation, Basel: Institut für Baustatik und Konstruktion, ETH Zürich. https://doi.org/10.1007/978-3-0348-7612-4.
Konečný, M., J. Kabeláč, and J. Navrátil. 2017. Use of Topology Optimization in Concrete Reinforcement Design. 24. Czech Concrete Days (2017). ČBS ČSSI. https://resources.ideastatica.com/Content/06_Detail/Verification/Articles/Topology_optimization_US.pdf.
Marti, P. 1985. "Truss Models in Detailing." Concrete International 7 (12): 66–73.
Marti, P. 2013. Theory of Structures: Fundamentals, Framed Structures, Plates and Shells. First edition. Berlin, Germany: Wiley Ernst & Sohn.
http://sfx.ethz.ch/sfx_locater?sid=ALEPH:EBI01&genre=book&isbn=9783433029916.
Marti, P., M.Alvarez, W. Kaufmann, and V. Sigrist. 1998. "Tension Chord Model for Structural Concrete." Structural Engineering International 8 (4): 287–298.
https://doi.org/10.2749/101686698780488875.
Mata-Falcón, J. 2015. "Serviceability and Ultimate Behaviour of Dapped-End Beams (In Spanish: Estudio Del Comportamiento En Servicio y Rotura de Los Apoyos a Media Madera)." PhD thesis, Valencia: Universitat Politècnica de València.
Meier, H. 1983. "Berücksichtigung Des Wirklichkeitsnahen Werkstoffverhaltens Beim Standsicherheitsnachweis Turmartiger Stahlbetonbauwerke." Institut für Massivbau, Universität Stuttgart.
Navrátil, J., P. Ševčík, L. Michalčík, P. Foltyn, and J. Kabeláč. 2017. A Solution for Walls and Details of Concrete Structures. 24. Czech Concrete Days.
Schlaich, J., K. Schäfer, and M. Jennewein. 1987a. "Toward a Consistent Design of Structural Concrete." PCI Journal 32 (3): 74–150.
Standards Australia. 2018. Concrete Structures (AS 3600:2018). Sydney, NSW: Standards Australia.
Standards Australia. 2022. Concrete Structures – Commentary (Supplement 1 to AS 3600:2018). Sydney, NSW: Standards Australia.
Vecchio, F.J., and M.P. Collins. 1986. "The Modified Compression Field Theory for Reinforced Concrete Elements Subjected to Shear." ACI Journal 83 (2): 219–31.