Odkaz prozatím funguje pro širokou škálu přípojů/styčníků. Vezměte však prosím v úvahu nepodporované funkce.
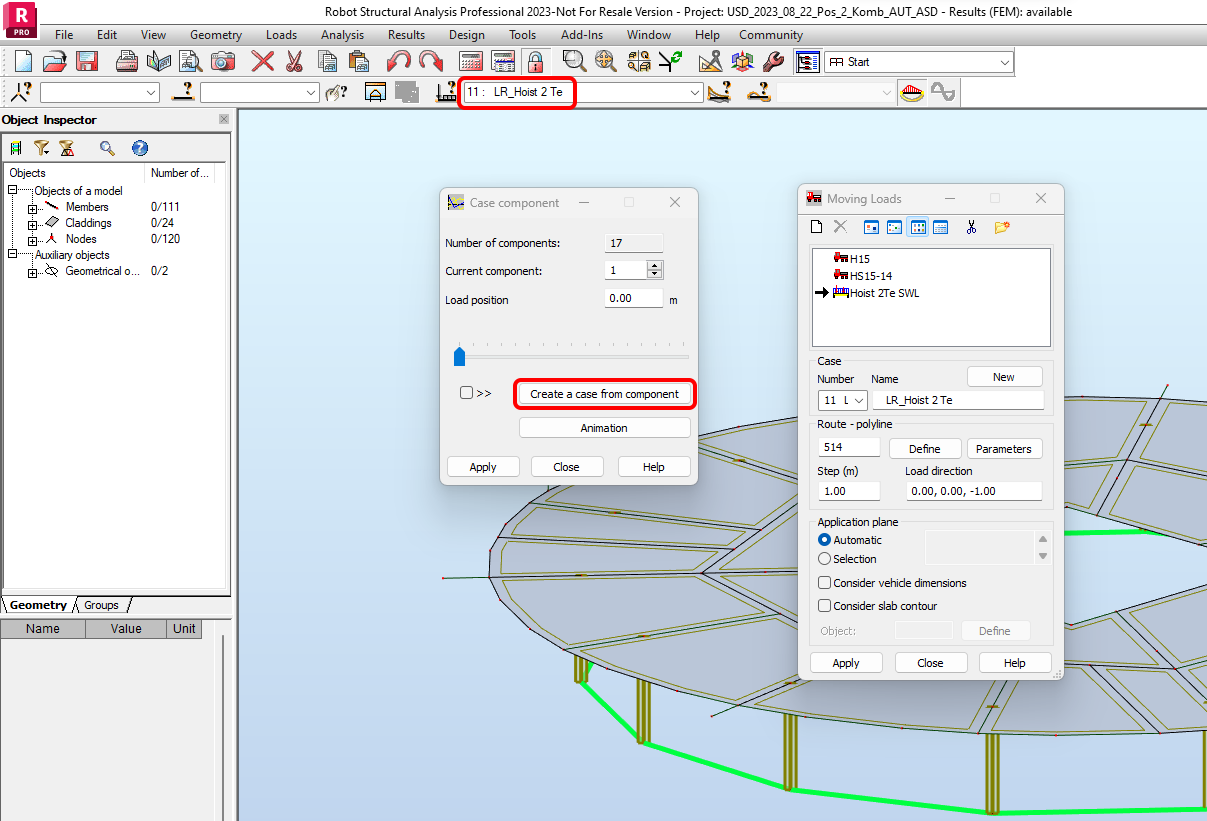
Omezení: Pohyblivý (stupňovitý) zatěžovací stav není importován do Checkbot. Kombinace zatížení obsahující pohyblivý (stupňovitý) zatěžovací stav jsou importovány, ale samotné pohyblivé (stupňovité) zatěžovací stavy a jejich vnitřní síly zahrnuty nejsou.
Řešení: Rozložte pohyblivý (stupňovitý) zatěžovací stav na jednotlivé zatěžovací stavy v Robot Structural Analysis pomocí příkazu „Create a case from component". Poté importujte přípoj nebo prvek a tyto zatěžovací stavy budou importovány samostatně a zároveň zahrnuty do definovaných kombinací zatížení.
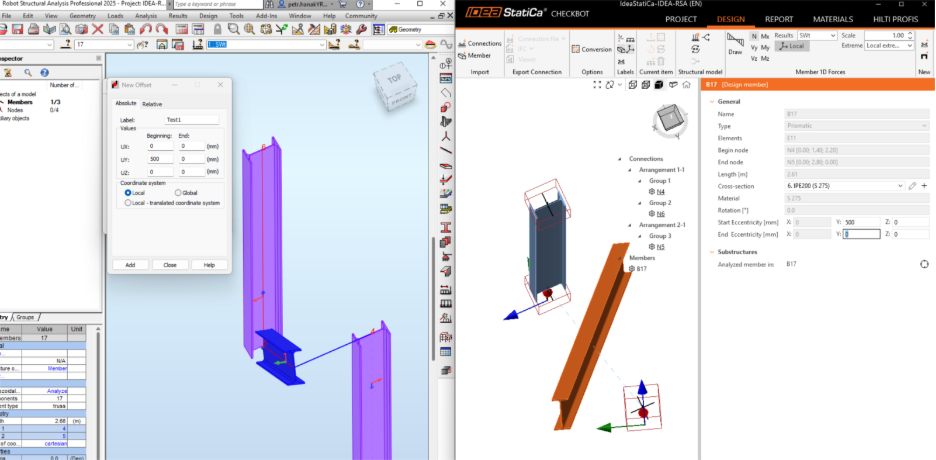
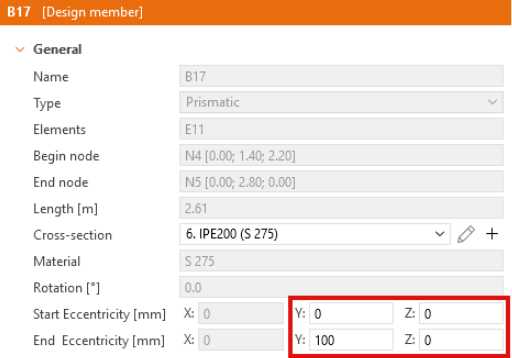
Omezení: Použití různých odsazení na začátku a na konci prvku v Robot způsobí, že výsledná geometrie prvků ovlivněných těmito odsazeními bude v Robot a Checkbot odlišná. Důvodem je rozdílný přístup k aplikaci těchto excentricit v každém z těchto programů.
Řešení: Upravte geometrii pomocí položek Počáteční a Koncová excentricita v Checkbot tak, aby bylo dosaženo požadované geometrie.
Omezení: Excentricita definovaná pouze na jednom konci v Robot – tento typ importu není v Checkbot podporován a výsledná geometrie je nesprávná. Problém nastává proto, že lokální souřadnicový systém (LCS) prvku v Robot již zahrnuje definovanou excentricitu. Při importu do Checkbot je prvek generován na základě počátečního bodu a směru převzatého z LCS Robot. To způsobuje nesprávné umístění prvku od samého začátku. Navíc je excentricita definovaná v Robot v Checkbot aplikována znovu, což zvyšuje odchylku a vede k ještě většímu rozdílu mezi zamýšlenou a importovanou geometrií.
Řešení: Nepoužívejte jednostrannou excentricitu v Robot; místo toho ji po importu upravte ručně v Checkbot. To však znamená, že možnost synchronizace nelze použít.