Vooralsnog werkt de koppeling voor een breed scala aan verbindingen/knopen. Houd echter rekening met de niet-ondersteunde functionaliteit.
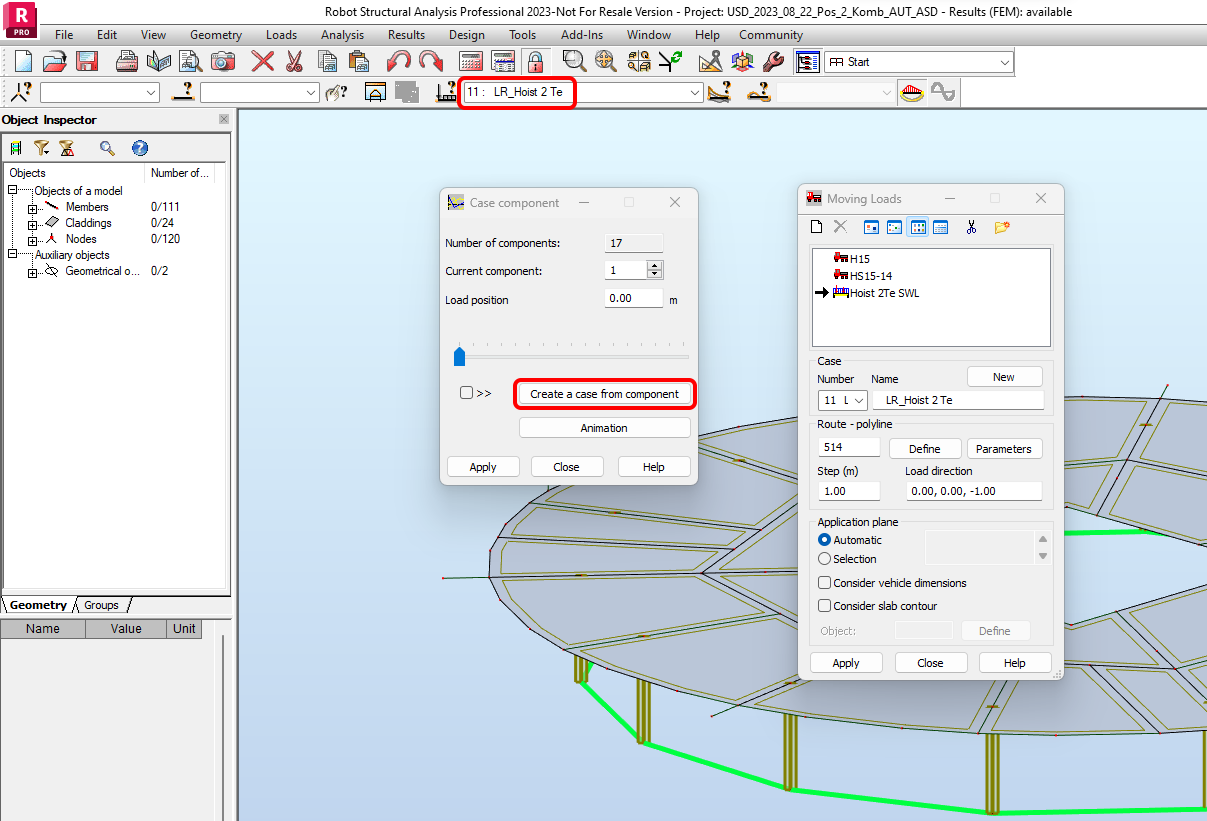
Beperking: Een rijdende (getrapt) belastingsgeval wordt niet geïmporteerd naar Checkbot. Belastingscombinaties die een rijdend (getrapt) belastingsgeval bevatten worden wel geïmporteerd, maar de rijdende (getrapte) belastingsgevallen en hun inwendige krachten zijn niet inbegrepen.
Oplossing: Splits het rijdende (getrapte) belastingsgeval op in afzonderlijke belastingsgevallen in Robot Structural Analysis met behulp van de opdracht "Create a case from component". Importeer vervolgens de verbinding of staaf; deze belastingsgevallen worden dan afzonderlijk geïmporteerd en ook opgenomen in de gedefinieerde belastingscombinaties.
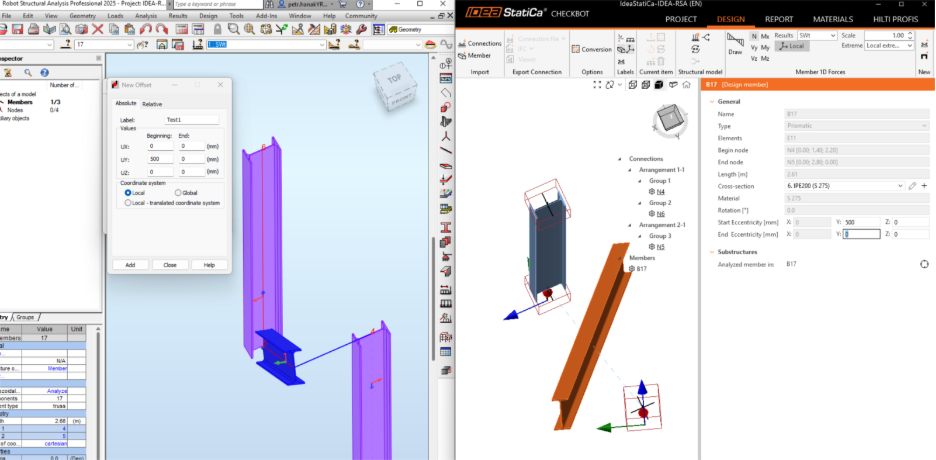
Beperking: Het gebruik van verschillende offsets aan het begin en einde in Robot zal ertoe leiden dat de uiteindelijke geometrie van de elementen die door deze offsets worden beïnvloed, verschilt tussen Robot en Checkbot. De reden is de verschillende aanpak voor het toepassen van deze excentriciteiten in elk van deze softwarepakketten.
Oplossing: Pas de geometrie aan met behulp van de items Start- en Eindexcentriciteit in Checkbot om de gewenste geometrie te bereiken.
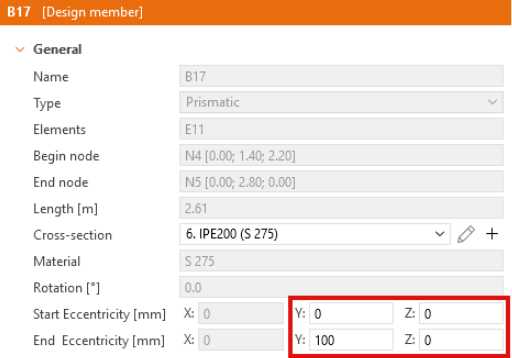
Beperking: Excentriciteit die slechts aan één uiteinde is gedefinieerd in Robot – dit type import wordt niet ondersteund in Checkbot en de resulterende geometrie is onjuist. Het probleem treedt op omdat in Robot het lokale coördinatenstelsel (LCS) van de staaf de gedefinieerde excentriciteit al omvat. Bij het importeren in Checkbot wordt de staaf gegenereerd op basis van het beginpunt en de richting afkomstig uit het LCS van Robot. Dit zorgt ervoor dat het element vanaf het begin onjuist wordt gepositioneerd. Bovendien wordt de in Robot gedefinieerde excentriciteit opnieuw toegepast in Checkbot, waardoor de afwijking toeneemt en er een nog grotere discrepantie ontstaat tussen de beoogde en geïmporteerde geometrie.
Oplossing: Gebruik geen eenzijdige excentriciteit in Robot; pas deze in plaats daarvan handmatig aan in Checkbot na het importeren. Dit betekent echter dat de synchronisatieoptie niet kan worden gebruikt.