Por enquanto, a ligação funciona para uma grande variedade de ligações/juntas. No entanto, tenha em conta a funcionalidade não suportada.
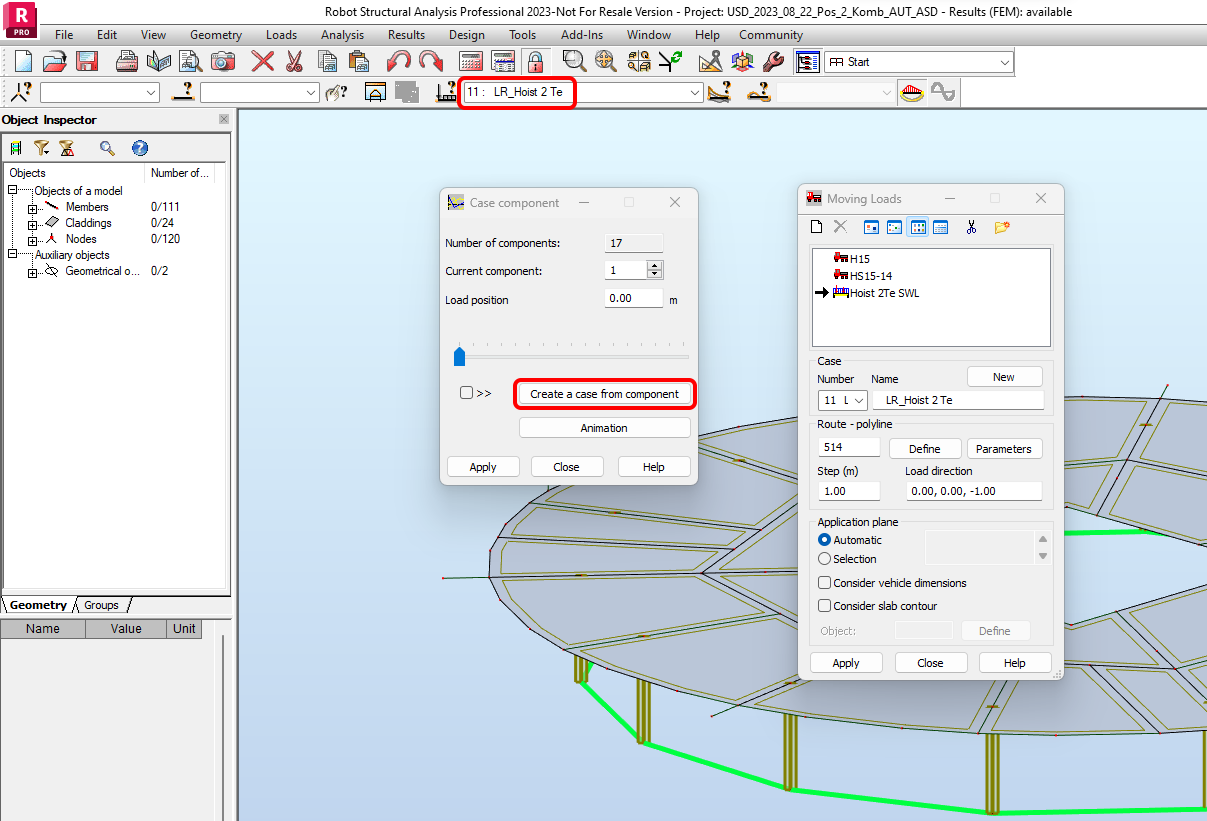
Limitação: O Caso de Carga Móvel (escalonado) não é importado para o Checkbot. As combinações de carga que contêm um Caso de Carga Móvel (escalonado) são importadas, mas os Casos de Carga Móvel (escalonado) e as respetivas forças internas não são incluídos.
Solução alternativa: Decomponha o Caso de Carga Móvel (escalonado) em casos de carga simples no Robot Structural Analysis utilizando o comando "Create a case from component". Em seguida, importe a ligação ou o elemento, e esses casos de carga serão importados separadamente e incluídos nas combinações de carga definidas.
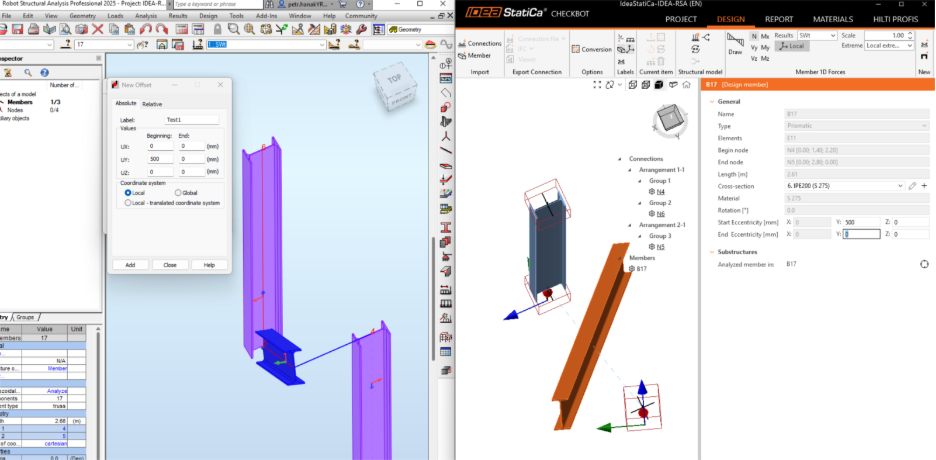
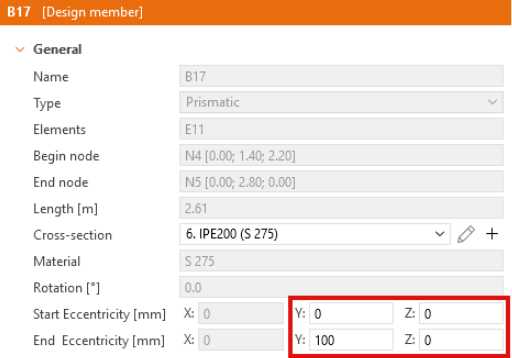
Limitação: A utilização de excentricidades diferentes no início e no fim no Robot fará com que a geometria final dos elementos afetados por essas excentricidades seja diferente no Robot e no Checkbot. A razão é a abordagem diferente de aplicação dessas excentricidades em cada um destes programas.
Solução alternativa: Ajuste a geometria utilizando os itens de Excentricidade de Início e de Fim no Checkbot para obter a geometria pretendida.
Limitação: Excentricidade definida apenas numa extremidade no Robot – este tipo de importação não é suportado no Checkbot e a geometria resultante é incorreta. O problema ocorre porque, no Robot, o sistema de coordenadas local (SCL) do elemento já inclui a excentricidade definida. Ao importar para o Checkbot, o elemento é gerado com base no ponto de início e na direção retirados do SCL do Robot. Isto faz com que o elemento seja posicionado incorretamente desde o início. Além disso, a excentricidade definida no Robot é aplicada novamente no Checkbot, o que aumenta a discrepância e resulta numa diferença ainda maior entre a geometria pretendida e a importada.
Solução alternativa: Não utilize excentricidade unilateral no Robot; em vez disso, ajuste-a manualmente no Checkbot após a importação. No entanto, isto significa que a opção de sincronização não pode ser utilizada.