Pour l'instant, le lien fonctionne pour une grande variété d'assemblages/joints. Veuillez toutefois tenir compte des fonctionnalités non prises en charge.
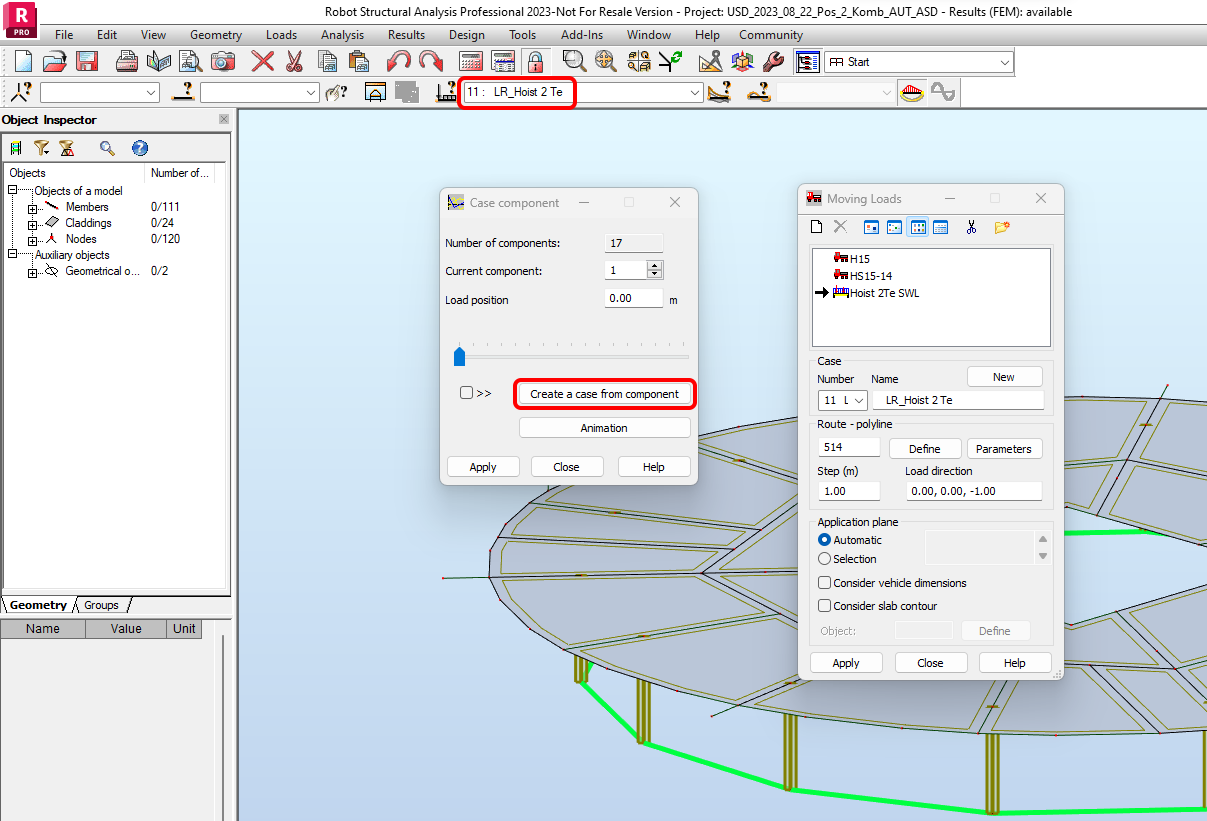
Limitation : Le cas de charge Mobile (par paliers) n'est pas importé dans Checkbot. Les combinaisons de charges contenant un cas de charge Mobile (par paliers) sont importées, mais les cas de charge Mobiles (par paliers) et leurs efforts internes ne sont pas inclus.
Solution de contournement : Décomposez le cas de charge Mobile (par paliers) en cas de charge simples dans Robot Structural Analysis à l'aide de la commande « Créer un cas à partir d'une composante ». Ensuite, importez l'assemblage ou l'élément, et ces cas de charge seront importés séparément et inclus dans les combinaisons de charges définies.
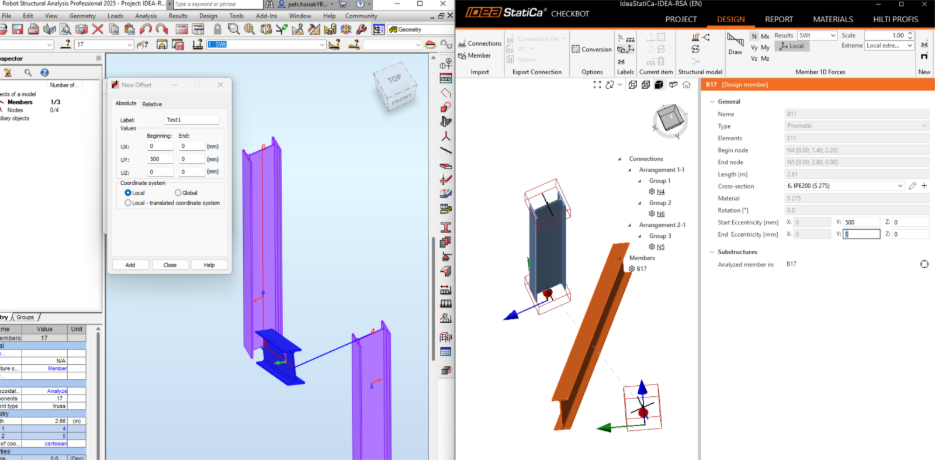
Limitation : L'utilisation de décalages différents en début et en fin dans Robot entraînera une géométrie finale différente dans Robot et dans Checkbot pour les éléments affectés par ces décalages. La raison est la différence d'approche dans l'application de ces excentricités dans chacun de ces logiciels.
Solution de contournement : Ajustez la géométrie à l'aide des paramètres d'excentricité de début et de fin dans Checkbot pour obtenir la géométrie souhaitée.
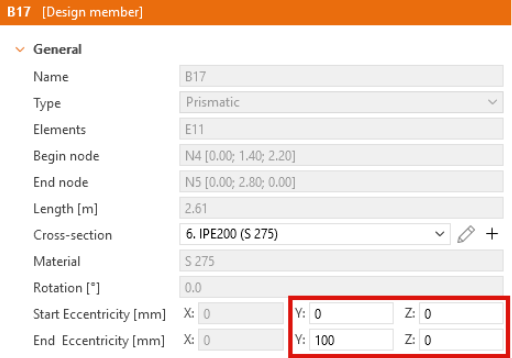
Limitation : Excentricité définie à une seule extrémité dans Robot – ce type d'importation n'est pas pris en charge dans Checkbot, et la géométrie résultante est incorrecte. Le problème survient car, dans Robot, le système de coordonnées local (SCL) de l'élément intègre déjà l'excentricité définie. Lors de l'importation dans Checkbot, l'élément est généré en fonction du point de départ et de la direction issus du SCL de Robot. Cela entraîne un positionnement incorrect de l'élément dès le départ. De plus, l'excentricité définie dans Robot est à nouveau appliquée dans Checkbot, ce qui accroît l'écart et entraîne une différence encore plus grande entre la géométrie prévue et la géométrie importée.
Solution de contournement : N'utilisez pas d'excentricité unilatérale dans Robot ; ajustez-la manuellement dans Checkbot après l'importation. Cependant, cela signifie que l'option de synchronisation ne peut pas être utilisée.