Egyelőre a kapcsolat a kapcsolatok/csomópontok széles körénél működik. Kérjük azonban, vegye figyelembe a nem támogatott funkciókat.
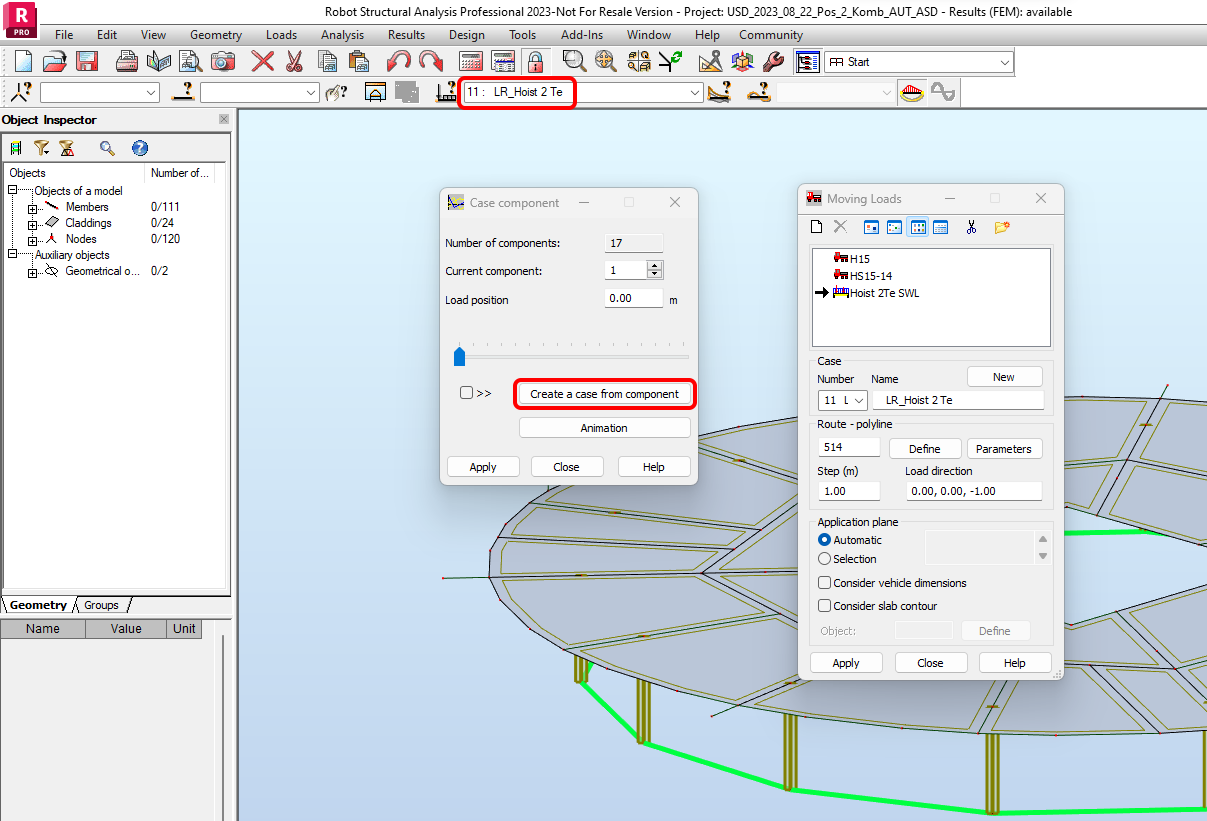
Korlátozás: A mozgó (lépéses) teherkombináció nem importálódik a Checkbot-ba. A mozgó (lépéses) teherkombinációt tartalmazó teherkombinációk importálódnak, de a mozgó (lépéses) teherkombinációk és azok belső erői nem szerepelnek benne.
Megkerülő megoldás: Bontsa fel a mozgó (lépéses) teherkombinációt egyedi teheresetekre a Robot Structural Analysis-ban a "Create a case from component" parancs segítségével. Ezután importálja a kapcsolatot vagy a szerkezeti elemet, és ezek a teherkombinációk külön-külön is importálódnak, valamint szerepelni fognak a meghatározott teherkombinációkban.
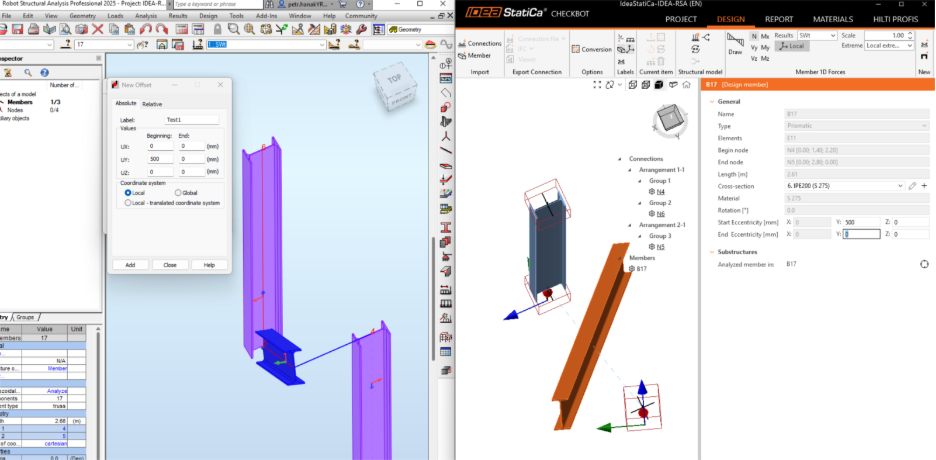
Korlátozás: Ha a Robotban eltérő eltolásokat alkalmaz az elején és a végén, az ezektől az eltolásktól érintett elemek végső geometriája eltérő lesz a Robotban és a Checkbot-ban. Ennek oka az, hogy mindkét szoftver eltérő módon alkalmazza ezeket az excentricitásokat.
Megkerülő megoldás: Módosítsa a geometriát a Checkbot-ban a Start és End Eccentricity elemek segítségével a kívánt geometria eléréséhez.
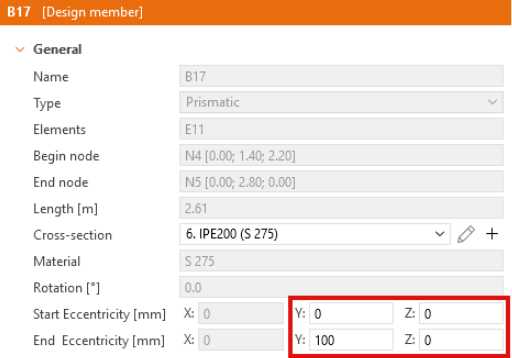
Korlátozás: A Robotban csak az egyik végén meghatározott excentricitás – ez az importálási típus nem támogatott a Checkbot-ban, és az eredményül kapott geometria helytelen. A probléma azért merül fel, mert a Robotban a szerkezeti elem helyi koordináta-rendszere (LCS) már tartalmazza a meghatározott excentricitást. A Checkbot-ba való importáláskor a szerkezeti elem a Robot LCS-éből vett kezdőpont és irány alapján jön létre. Ez azt okozza, hogy az elem már a kezdetektől fogva helytelenül van elhelyezve. Ráadásul a Robotban meghatározott excentricitást a Checkbot ismét alkalmazza, ami növeli az eltérést, és még nagyobb különbséget eredményez a tervezett és az importált geometria között.
Megkerülő megoldás: Ne használjon egyoldalú excentricitást a Robotban; ehelyett importálás után manuálisan módosítsa azt a Checkbot-ban. Ez azonban azt jelenti, hogy a szinkronizálási lehetőség nem használható.