현재 이 링크는 다양한 연결/접합부에 대해 작동합니다. 그러나 지원되지 않는 기능을 고려하시기 바랍니다.
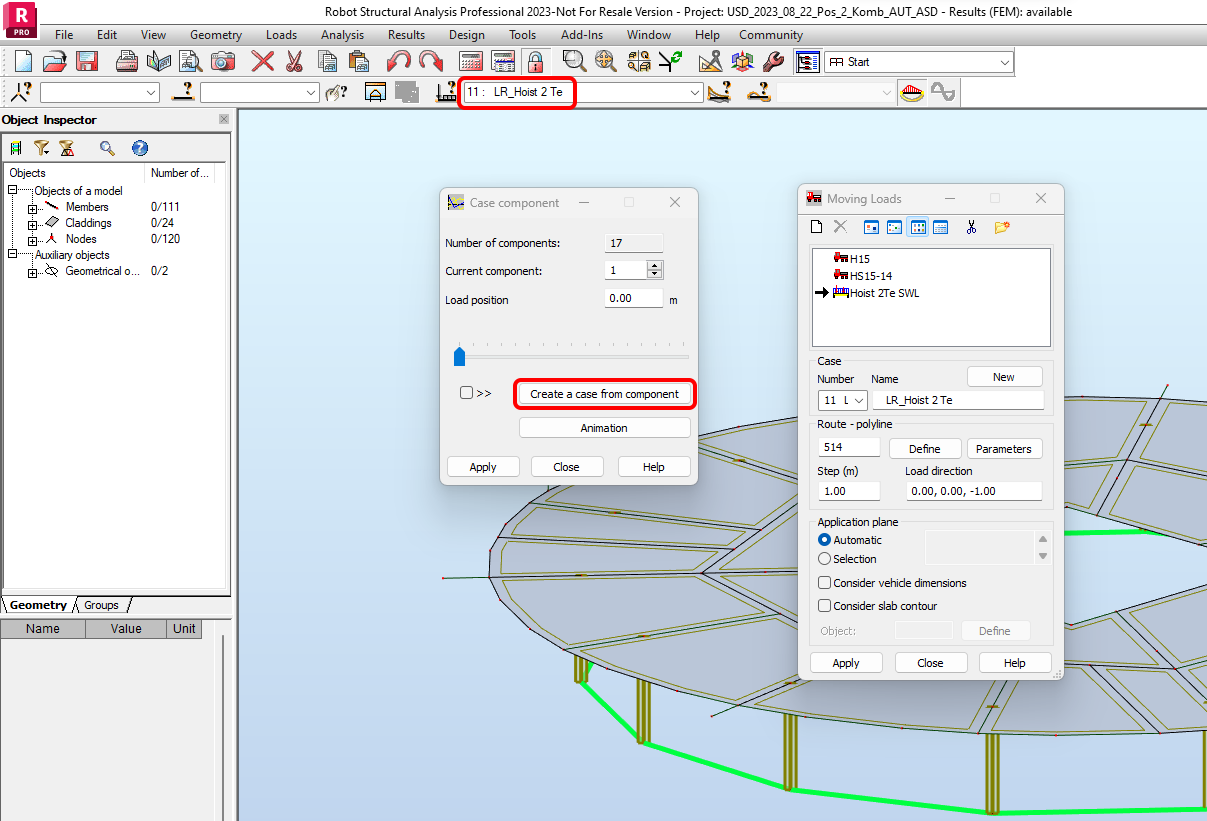
제한 사항: 이동(단계적) 하중 케이스는 Checkbot으로 가져올 수 없습니다. 이동(단계적) 하중 케이스를 포함하는 하중 조합은 가져올 수 있지만, 이동(단계적) 하중 케이스와 그 내력은 포함되지 않습니다.
해결 방법: Robot Structural Analysis에서 "Create a case from component" 명령을 사용하여 이동(단계적) 하중 케이스를 단일 하중 케이스로 분해하십시오. 그런 다음 연결 또는 부재를 가져오면 이러한 하중 케이스가 별도로 가져와지고 정의된 하중 조합에도 포함됩니다.
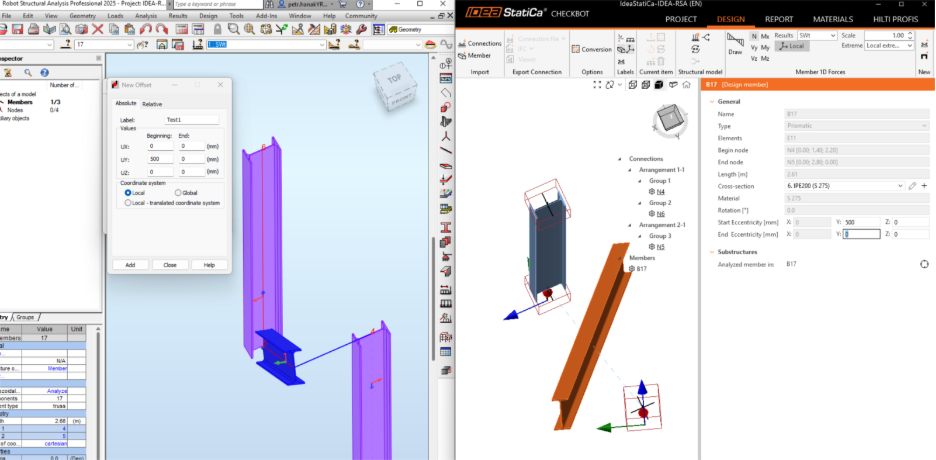
제한 사항: Robot에서 시작부와 끝부에 서로 다른 오프셋을 사용하면 이러한 오프셋의 영향을 받는 형상이 Robot과 Checkbot에서 다르게 나타납니다. 이는 각 소프트웨어에서 편심을 적용하는 방식이 다르기 때문입니다.
해결 방법: Checkbot의 시작 및 끝 편심 항목을 사용하여 원하는 형상이 되도록 형상을 조정하십시오.
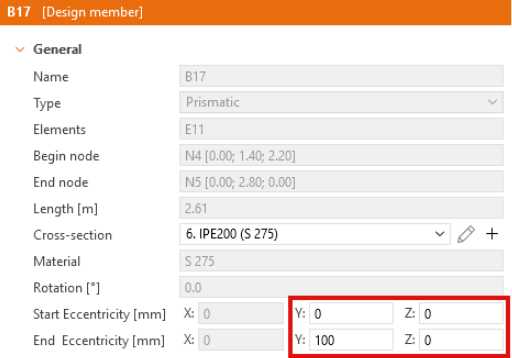
제한 사항: Robot에서 한쪽 끝에만 편심이 정의된 경우 – 이 유형의 가져오기는 Checkbot에서 지원되지 않으며, 결과 형상이 올바르지 않습니다. 이 문제는 Robot에서 부재의 국부 좌표계(LCS)에 이미 정의된 편심이 포함되어 있기 때문에 발생합니다. Checkbot으로 가져올 때 부재는 Robot의 LCS에서 가져온 시작점과 방향을 기반으로 생성됩니다. 이로 인해 요소가 처음부터 잘못된 위치에 배치됩니다. 또한 Robot에서 정의된 편심이 Checkbot에서 다시 적용되어 불일치가 증가하고 의도한 형상과 가져온 형상 사이의 차이가 더욱 커집니다.
해결 방법: Robot에서 단측 편심을 사용하지 말고, 가져온 후 Checkbot에서 수동으로 조정하십시오. 단, 이 경우 동기화 옵션을 사용할 수 없습니다.