
Stabilità laterale di travi lunghe in calcestruzzo precompresso durante il sollevamento
Il sollevamento di travi lunghe in calcestruzzo precompresso è la prima delle fasi costruttive durante le quali la stabilità può essere persa attraverso un meccanismo denominato instabilità flesso-torsionale. Dal lato del progettista, gli elementi vengono solitamente verificati per la stabilità laterale sulla struttura completata, che non è sempre una condizione critica, soprattutto perché le travi tendono ad essere stabilizzate dagli elementi trasversali, dal solaio o dalla copertura stessa. I problemi di stabilità durante la costruzione sono lasciati ai produttori e agli appaltatori. Le formule di instabilità laterale presenti in molti libri di testo non sono sufficientemente generali per le esigenze odierne e quindi non riescono a soddisfare le richieste del moderno produttore, che è spinto soprattutto dai tempi e dai prezzi dei materiali.
In questo articolo di verifica, confrontiamo i risultati di IDEA StatiCa Beam e del suo modulo per il calcolo della stabilità trasversale con il calcolo analitico elaborato da Robert F. Mast 1989 [1] e Robert F. Mast 1993 [2]. Nella prima parte del testo, introduciamo brevemente il metodo analitico e presentiamo un calcolo campione completo per un caso di carico, incluse tutte le formule e i calcoli intermedi. Confrontiamo quindi questo con il risultato dell'applicazione e infine forniamo un riepilogo di diverse situazioni di progetto.
Teoria di base dell'equilibrio di rotolamento
Quando una trave è appesa a supporti flessibili come un'asola di sollevamento, è libera di ruolare. Il centro di rotazione è il punto in cui il supporto flessibile si unisce al corpo rigido. Una linea che passa per il centro di rotazione in corrispondenza di ciascun appoggio forma un asse di rotolamento. L'eccentricità iniziale ei e lo spostamento dei cernieri pongono sempre il centro di gravità leggermente fuori dall'asse di rotolamento. Ciò causa l'inclinazione della trave attorno all'asse di rotolamento di un piccolo angolo θi.
\[\theta_{i}=tan\left(\frac{e_{i}}{y_{r}}\right)≈\frac{e_{i}}{y_{r}}\]
Questa leggera inclinazione fa sì che la componente del peso proprio della trave W sinθi venga applicata nella direzione dell'asse debole. La trave si flette, spostando ulteriormente il centro di gravità della massa della trave. Ciò provoca un aumento dell'angolo di rotolamento θ, che incrementa sia il carico laterale che la freccia. Questo processo continua fino al raggiungimento dell'equilibrio a un angolo θ leggermente maggiore di θi, oppure fino a quando la freccia trasversale è sufficiente a causare il collasso della trave.

\[ \textsf{\textit{\footnotesize{Fig. 1\qquad Beam free to roll and deflect laterally – perspective}}}\]

\[ \textsf{\textit{\footnotesize{Fig. 2\qquad Beam free to roll and deflect laterally – end view and equilibrium diagram}}}\]
La componente del peso proprio agente attorno all'asse debole W sinθi ha causato una freccia laterale aggiuntiva z del centro di gravità. Per trovare l'angolo di equilibrio θ, è necessario determinare z, ma z è determinato dalla componente del peso W sinθ, che a sua volta dipende da θ.
Il problema può essere risolto calcolando prima una freccia teorica (fittizia) z0 del centro di gravità con il peso totale applicato attorno all'asse debole. Poiché la componente dell'asse debole è W sinθ, z può essere ricavata come z=z0 sinθ. La freccia a mezzaluce di una trave semplicemente appoggiata a carico uniformemente distribuito può essere calcolata con la nota formula:
\[\beta_{y}=\frac{5}{384}\frac{wl^{4}}{EI_{y}}\]
Ma βy è la freccia massima dell'asse della trave, e abbiamo bisogno di z0, che è la distanza del centro di gravità dell'asse deformato della trave. z0 è approssimativamente 2/3 di βy. Più precisamente:
\[z_{0}=\frac{1}{120}\frac{wl^{4}}{EI_{y}}=0.64\beta_{y}\]
La derivazione di questa formula può essere trovata in [1] Appendice F. L'equazione di equilibrio può quindi essere riscritta come:
\[tan\theta=\frac{z_{0}sin\theta+e_{i}}{y_{r}}\]
L'unica incognita è ora θ, che può essere determinata per approssimazioni successive. Per angoli θ < 0.2 rad, si può utilizzare l'approssimazione θ ≈ sinθ ≈ tanθ. L'equazione di equilibrio si semplifica quindi in:
\[\theta=\frac{e_{i}}{y_{r}-z_{0}}\]
Effetto della posizione del punto di sollevamento
Posizionare il punto di sollevamento anche a una piccola distanza dall'estremità può migliorare notevolmente la stabilità a flessione laterale. Non solo la freccia si riduce, approssimativamente alla quarta potenza della luce netta, ma z0 migliora ulteriormente, poiché il peso nelle estremità a sbalzo si trova sul lato opposto dell'asse di rotolamento.
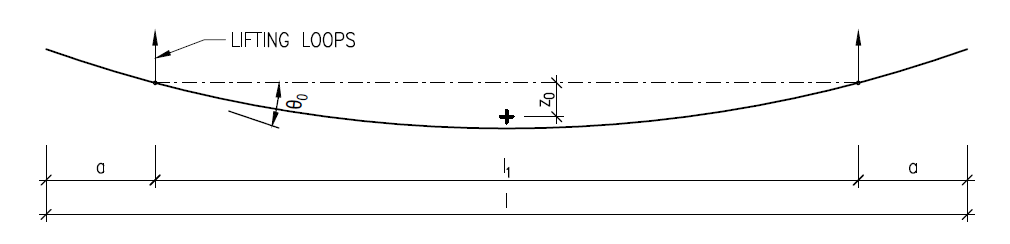
\[ \textsf{\textit{\footnotesize{Fig. 3\qquad Computation of z0 including overhanging ends}}}\]
L'equazione per z0 è stata ottenuta integrando la forma della curva di deformazione per trovarne il baricentro.
\[z_{0}=\frac{w}{12EI_{y}l}\left( \frac{1}{10}l_{1}^{5}-a^{2}l_{1}^{3}+3a^{4}l_{1}+\frac{6}{5}a^{5} \right)\]
Esempio di confronto
Lo scopo di questo articolo è dimostrare la correttezza dei calcoli di stabilità trasversale in IDEA StatiCa Beam per il caso di sollevamento di travi. Vale la pena notare che lo stesso solutore geometricamente e materialmente non lineare viene utilizzato per tutte le situazioni di progetto, modificando solo le condizioni al contorno o la condizione iniziale. Come esempio per confrontare i risultati con il metodo analitico presentato sopra, è stata scelta una trave prismatica a sezione I, precompressa centricamente in modo che la forza normale sia approssimativamente Np = 1600 kN. La trave è ulteriormente armata con armatura in acciaio B500B come mostrato ed è realizzata in calcestruzzo C40/50. La precompressione è scelta in modo che non si verifichi alcuna fessurazione per nessuna condizione in esame.
Per l'analisi nell'applicazione viene utilizzato un diagramma di progetto tensione-deformazione bilineare, dove è possibile determinare semplicemente il modulo di elasticità per il ramo elastico Ecd=fcd/εc3.

\[ \textsf{\textit{\footnotesize{Fig. 4\qquad Perspective view of the beam under examination}}}\]
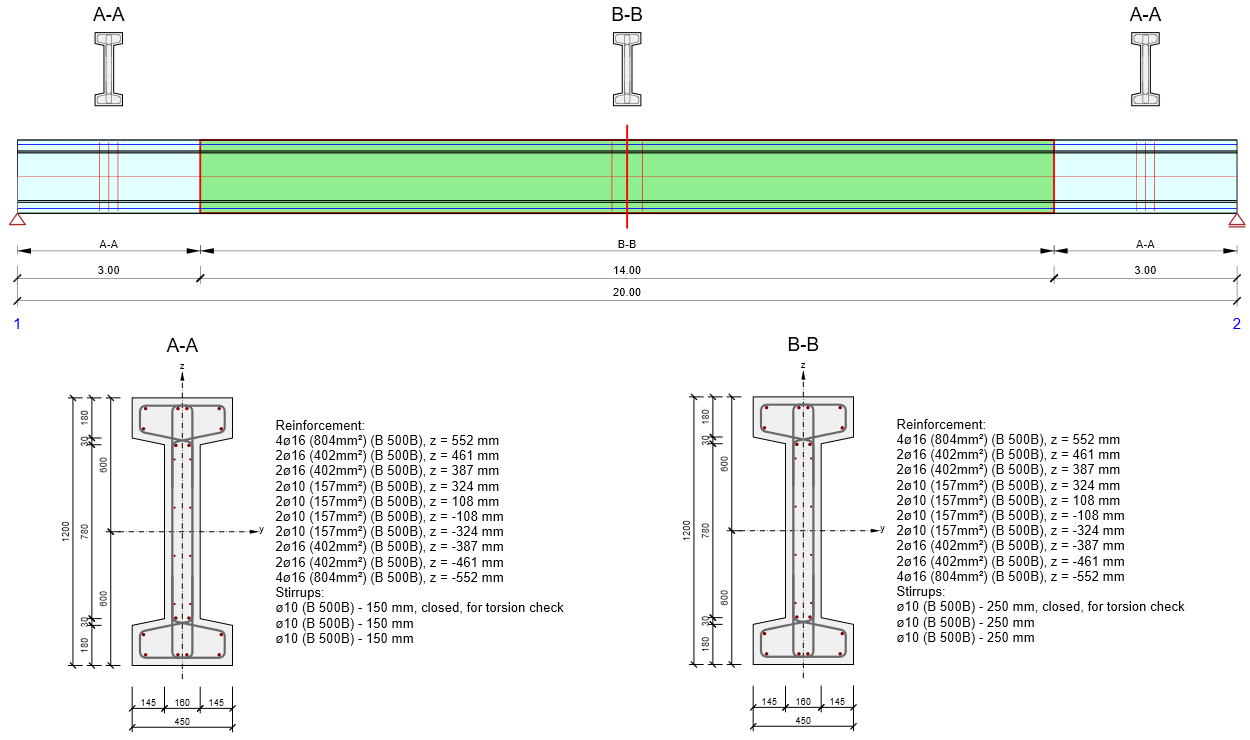
\[ \textsf{\textit{\footnotesize{Fig. 5\qquad Geometry and reinforcement}}}\]
Si noti che gli assi sono etichettati diversamente nella Figura 5 rispetto all'introduzione teorica precedente, dove l'etichettatura era basata su [1] e [2].
La trave sarà sospesa tramite ganci di altezza hh = 150 mm. Ciò significa che yr = 0.5h + hh = 600 + 150 = 750 mm.
Calcolo analitico
Il principio di calcolo è già stato menzionato all'inizio di questo articolo. Ora esamineremo in dettaglio una delle situazioni di progetto e la confronteremo con il risultato dell'applicazione. I cernieri saranno posizionati a a = 1.0 m e l'eccentricità iniziale sarà eig = 350 mm. Questa è l'eccentricità iniziale geometrica della trave deformata, intesa come la freccia massima dell'asse. Non è quindi l'eccentricità iniziale del centro di gravità rispetto all'asse di rotolamento ei utilizzata nei calcoli manuali sopra riportati. Per ragioni pratiche, il valore eig viene utilizzato come dato di input per l'applicazione IDEA StatiCa Beam. Per tutti i casi considerati, il valore eig è stato convertito nel valore ei utilizzando il metodo grafico nell'applicazione CAD.

\[ \textsf{\textit{\footnotesize{Fig. 6\qquad Non-iterative approach}}}\]
Poiché abbiamo ottenuto un angolo θ > 0.2 rad, verificheremo la correttezza dei risultati senza utilizzare l'approssimazione sopra menzionata θ ≈ sinθ ≈ tanθ. Dobbiamo quindi procedere con il calcolo iterativo, dove calcoliamo prima l'angolo di rotolamento iniziale θi e continuiamo iterativamente fino alla stabilizzazione del calcolo.
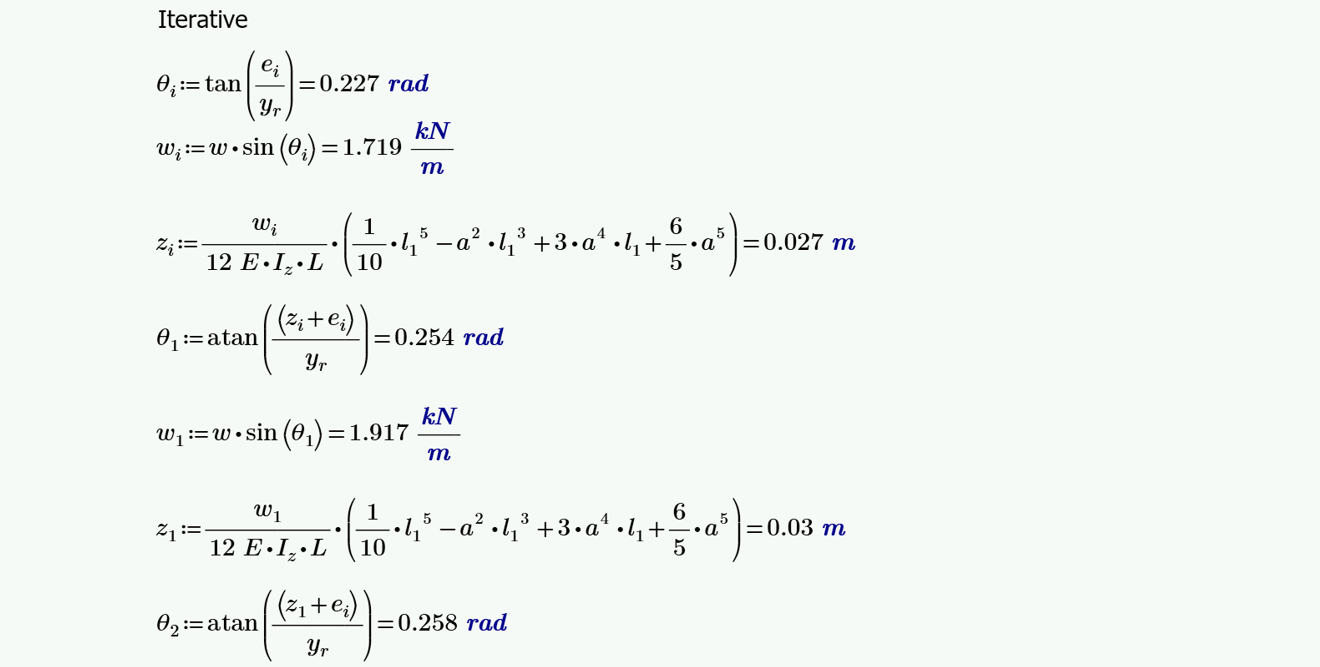
\[ \textsf{\textit{\footnotesize{Fig. 7\qquad Iterative approach}}}\]
Vediamo ora come lo stesso problema è stato calcolato in IDEA StatiCa Beam e nel suo modulo di stabilità laterale. I valori di input per il calcolo sono presentati nella Figura 8. Il coefficiente dinamico così come gli altri coefficienti di combinazione sono impostati a 1.0.
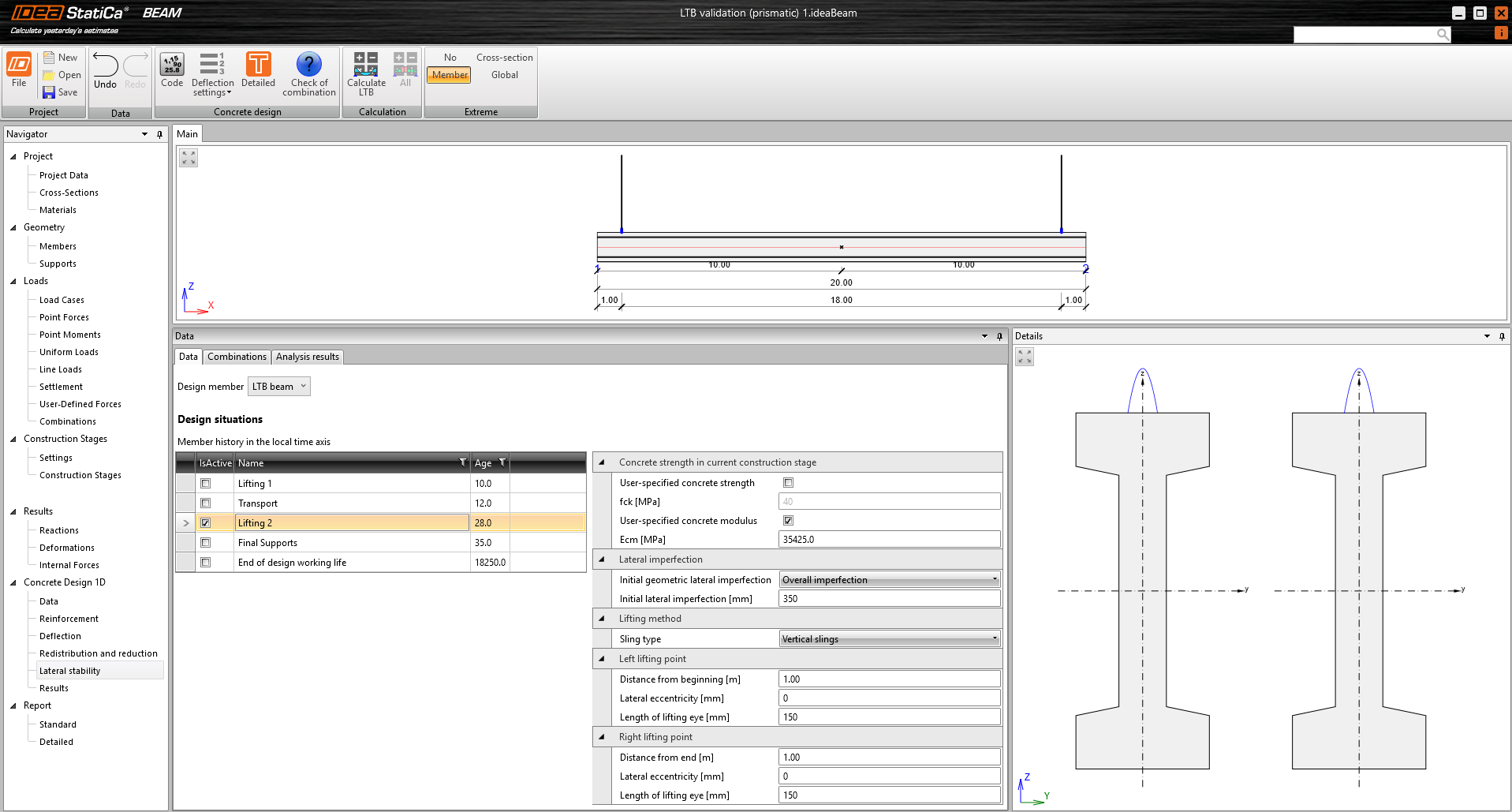
\[ \textsf{\textit{\footnotesize{Fig. 8\qquad Lateral stability data input}}}\]
Risultati di IDEA StatiCa Beam
A fini di verifica, confrontiamo il valore della rotazione della trave poiché questo valore è l'output di base del solutore. Altri output, come le deformazioni e le forze interne, dipendono direttamente da esso e sono ad esso correlati. Prima osserviamo la rotazione iniziale θinit = 220.4 mrad, che dovrebbe corrispondere al valore di θi = 227 mrad del calcolo analitico.
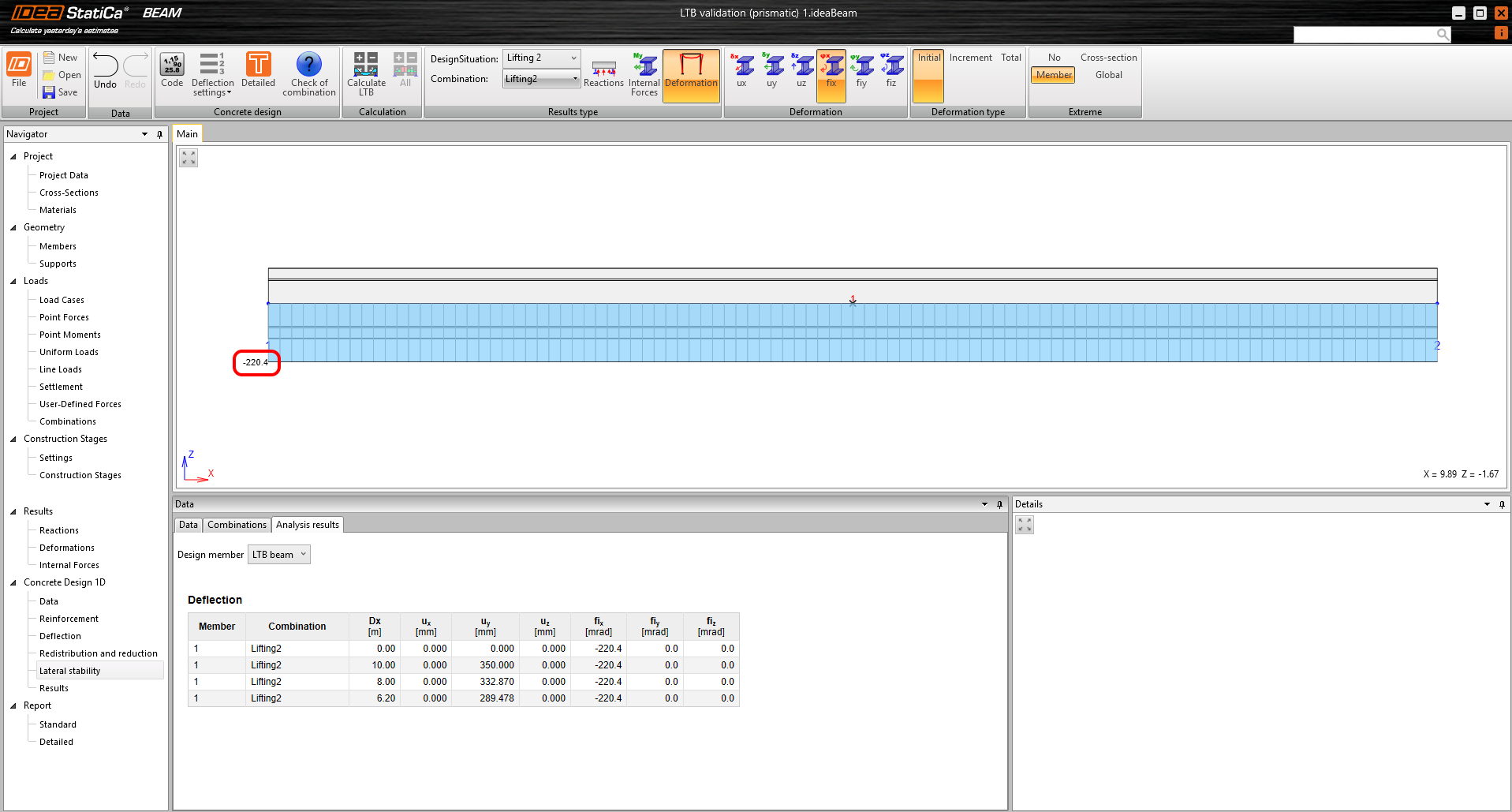
\[ \textsf{\textit{\footnotesize{Fig. 9\qquad Initial rotation}}}\]
Infine, possiamo confrontare i risultati della rotazione complessiva della trave, visibili nella Figura 10. Sono evidenziati i valori sia all'inizio della trave che al suo centro. È quindi possibile osservare l'effetto della rigidezza torsionale della trave, che non viene catturato dal calcolo analitico.
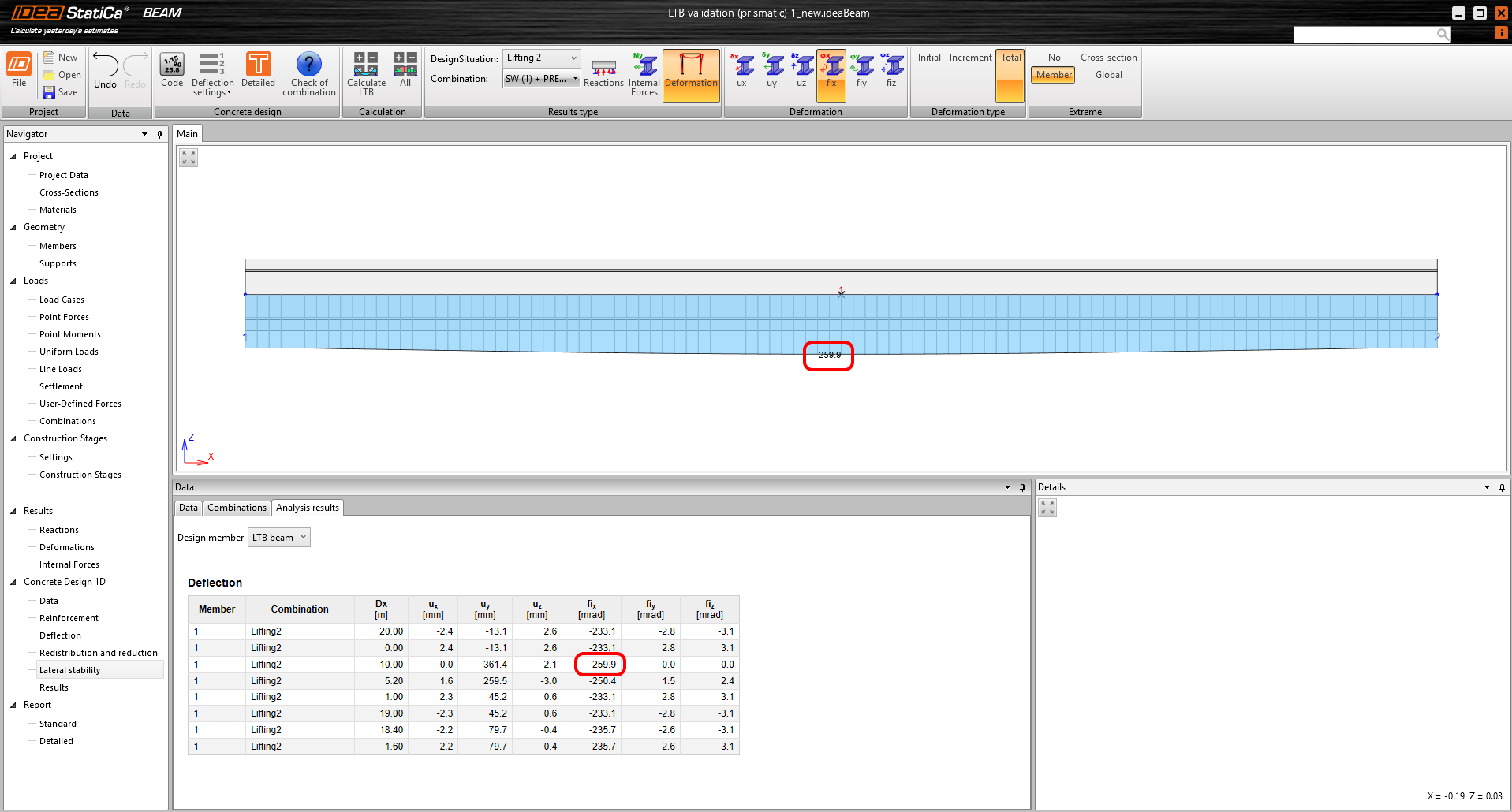
\[ \textsf{\textit{\footnotesize{Fig. 10\qquad Final rotation}}}\]
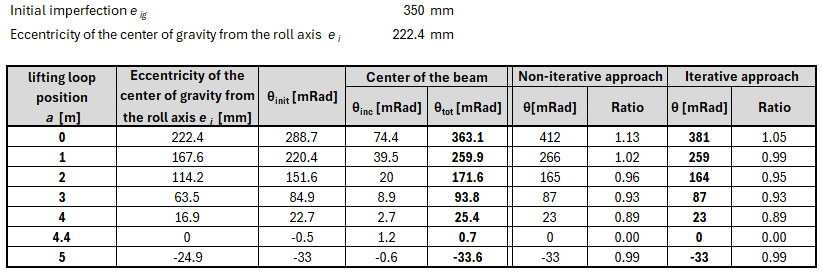
Tutti gli esempi
Questo capitolo presenta tutte le verifiche eseguite per la trave studiata con diverse combinazioni di imperfezione iniziale e posizioni delle asole di sollevamento.
θinit è il valore della rotazione iniziale ottenuto dall'applicazione e deve essere confrontato con θi del calcolo analitico. θinc è l'incremento di rotazione calcolato nell'applicazione causato dalla rotazione aggiuntiva dovuta alla deformazione laterale per peso proprio, e θtot è la rotazione risultante da confrontare con il valore θ del calcolo analitico.
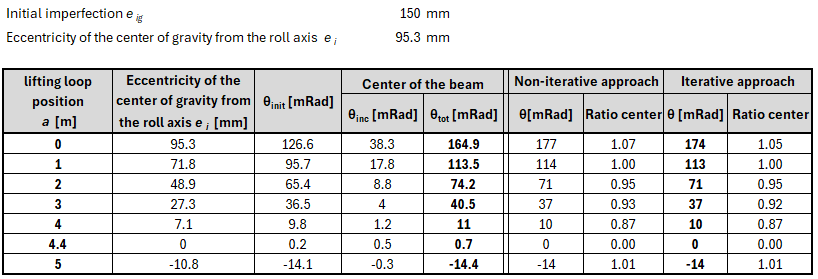
\[ \textsf{\textit{\footnotesize{Fig. 11\qquad Design situation 1}}}\]
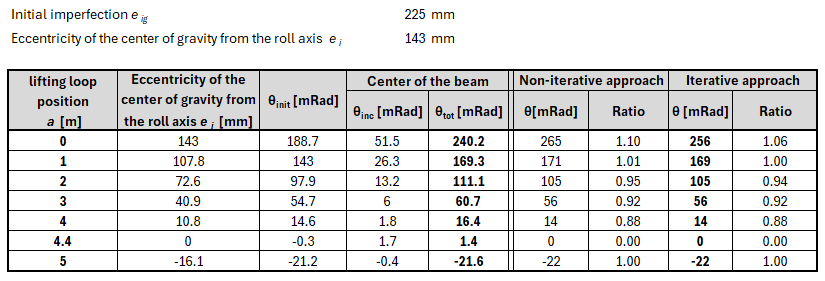
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 2}}}\]
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 3}}}\]
Conclusione
In questo articolo, abbiamo confrontato i calcoli analitici della stabilità trasversale delle travi nella situazione di progetto di sollevamento secondo [1] e [2] con l'analisi FE completamente non lineare dal punto di vista materiale e geometrico eseguita in IDEA StatiCa Beam. I risultati mostrano che l'analisi più sofisticata si è rivelata molto accurata, affidabile e sufficientemente precisa. Grazie alla sua generalità, può coprire anche un portafoglio significativamente più ampio di situazioni di progetto senza semplificazioni e laboriosi calcoli manuali. È inoltre possibile osservare in quale posizione dei cernieri viene raggiunta la posizione di equilibrio tale che la trave non ruoti. In questo stato, le estremità a sbalzo generano un momento stabilizzante uguale al momento destabilizzante dovuto alla deformazione della trave.
Riferimenti
[1] Mast, R. F. (1989). "Lateral Stability of Long Prestressed Concrete Beams, Part 1." PCI J. 34(1), 34–53.
[2] Mast, R. F. (1993). "Lateral Stability of Long Prestressed Concrete Beams, Part 2." PCI J., 38(1), 70–88.