
การโก่งเดาะด้านข้างและบิดของคานคอนกรีตอัดแรงยาวระหว่างการยก
การยกคานคอนกรีตอัดแรงยาวเป็นหนึ่งในขั้นตอนการก่อสร้างแรกที่อาจเกิดการสูญเสียเสถียรภาพโดยกลไกที่เรียกว่าการโก่งเดาะด้านข้างและบิด ในด้านของผู้ออกแบบ ชิ้นส่วนมักได้รับการประเมินเสถียรภาพด้านข้างบนโครงสร้างที่สร้างเสร็จแล้ว ซึ่งไม่ใช่เงื่อนไขวิกฤตเสมอไป โดยเฉพาะอย่างยิ่งเนื่องจากคานมักได้รับการเสริมเสถียรภาพโดยชิ้นส่วนตามขวาง พื้น หรือหลังคาเอง ปัญหาเสถียรภาพระหว่างการก่อสร้างจะถูกปล่อยให้เป็นหน้าที่ของผู้ผลิตและผู้รับเหมา สูตรการโก่งเดาะด้านข้างที่พบในตำราเรียนหลายเล่มไม่มีความทั่วไปเพียงพอสำหรับความต้องการในปัจจุบัน และจึงไม่สามารถตอบสนองความต้องการของผู้ผลิตสมัยใหม่ที่ถูกกดดันโดยเฉพาะจากเวลาและราคาวัสดุ
ในบทความการตรวจสอบนี้ เราเปรียบเทียบผลลัพธ์จาก IDEA StatiCa Beam และโมดูลสำหรับการคำนวณเสถียรภาพตามขวางกับการคำนวณเชิงวิเคราะห์ที่จัดทำโดย Robert F. Mast 1989 [1] และ Robert F. Mast 1993 [2] ในส่วนแรกของข้อความ เราแนะนำวิธีการเชิงวิเคราะห์โดยย่อและนำเสนอตัวอย่างการคำนวณที่สมบูรณ์สำหรับกรณีแรงกระทำหนึ่งกรณี รวมถึงสูตรและการคำนวณขั้นกลางทั้งหมด จากนั้นเราเปรียบเทียบกับผลลัพธ์จากแอปพลิเคชัน และสุดท้ายให้สรุปสถานการณ์การออกแบบหลายกรณี
ทฤษฎีพื้นฐานของสมดุลการหมุน
เมื่อคานแขวนจากจุดรองรับที่ยืดหยุ่นได้ เช่น ห่วงยก คานจะสามารถหมุนได้อย่างอิสระ จุดศูนย์กลางการหมุนคือจุดที่จุดรองรับที่ยืดหยุ่นเชื่อมต่อกับวัตถุแข็ง เส้นที่ผ่านจุดศูนย์กลางการหมุนที่จุดรองรับแต่ละจุดก่อให้เกิดแกนการหมุน ความเยื้องศูนย์เริ่มต้น ei และการเยื้องของบานพับจะทำให้จุดศูนย์ถ่วงอยู่ห่างจากแกนการหมุนเล็กน้อยเสมอ ซึ่งทำให้คานเอียงรอบแกนการหมุนด้วยมุมเล็กน้อย θi
\[\theta_{i}=tan\left(\frac{e_{i}}{y_{r}}\right)≈\frac{e_{i}}{y_{r}}\]
การเอียงเล็กน้อยนี้ทำให้องค์ประกอบของน้ำหนักคาน W sinθi ถูกกระทำในทิศทางของแกนอ่อน จากนั้นคานจะโค้งงอและเลื่อนจุดศูนย์ถ่วงของมวลคานออกไปอีก ซึ่งทำให้มุมการหมุน θ เพิ่มขึ้น ส่งผลให้แรงกระทำด้านข้างและการโก่งตัวเพิ่มขึ้นด้วย กระบวนการนี้ดำเนินต่อไปจนกว่าจะถึงสมดุลที่มุม θ ที่มากกว่า θi เล็กน้อย หรือจนกว่าการโก่งตัวตามขวางมีขนาดเพียงพอที่จะทำให้คานวิบัติ

\[ \textsf{\textit{\footnotesize{Fig. 1\qquad Beam free to roll and deflect laterally – perspective}}}\]

\[ \textsf{\textit{\footnotesize{Fig. 2\qquad Beam free to roll and deflect laterally – end view and equilibrium diagram}}}\]
องค์ประกอบของน้ำหนักตัวเองที่กระทำรอบแกนอ่อน W sinθi ทำให้เกิดการโก่งตัวด้านข้างเพิ่มเติม z ของจุดศูนย์ถ่วง ในการหามุมสมดุล θ จะต้องหาค่า z แต่ z ถูกกำหนดโดยองค์ประกอบน้ำหนัก W sinθ ซึ่งขึ้นอยู่กับ θ เองด้วย
ปัญหานี้อาจแก้ได้โดยการคำนวณการโก่งตัว (สมมติ) ทางทฤษฎี z0 ของจุดศูนย์ถ่วงเมื่อน้ำหนักเต็มถูกกระทำรอบแกนอ่อนก่อน จากนั้น เนื่องจากองค์ประกอบแกนอ่อนคือ W sinθ, จึงสามารถหา z ได้เป็น z=z0 sinθ. การโก่งตัวที่กึ่งกลางช่วงของคานรับน้ำหนักแบบกระจายสม่ำเสมอบนจุดรองรับอย่างง่ายสามารถคำนวณได้โดยใช้สูตรที่รู้จักกันดี:
\[\beta_{y}=\frac{5}{384}\frac{wl^{4}}{EI_{y}}\]
แต่ βy คือการโก่งตัวสูงสุดของส่วนโค้งของคาน และเราต้องการ z0 ซึ่งเป็นระยะของจุดศูนย์ถ่วงของส่วนโค้งที่โก่งตัวของคาน z0 มีค่าประมาณ 2/3 ของ βy โดยแม่นยำกว่านั้น:
\[z_{0}=\frac{1}{120}\frac{wl^{4}}{EI_{y}}=0.64\beta_{y}\]
การอนุมานสูตรนี้สามารถพบได้ใน [1] ภาคผนวก F สมการสมดุลจึงสามารถเขียนใหม่ได้เป็น:
\[tan\theta=\frac{z_{0}sin\theta+e_{i}}{y_{r}}\]
ตัวไม่ทราบค่าเพียงตัวเดียวในขณะนี้คือ θ ซึ่งอาจหาได้โดยการประมาณค่าต่อเนื่อง สำหรับมุม θ < 0.2 rad อาจใช้การประมาณ θ ≈ sinθ ≈ tanθ ได้ สมการสมดุลจึงลดรูปเป็น:
\[\theta=\frac{e_{i}}{y_{r}-z_{0}}\]
ผลของตำแหน่งจุดยก
การวางจุดยกแม้เพียงระยะเล็กน้อยจากปลายคานสามารถปรับปรุงเสถียรภาพการโก่งตัวด้านข้างได้อย่างมาก ไม่เพียงแต่การโก่งตัวจะลดลงโดยประมาณกำลังสี่ของช่วงสุทธิ แต่ z0 ยังได้รับการปรับปรุงมากยิ่งขึ้น เนื่องจากน้ำหนักที่ส่วนยื่นปลายอยู่ด้านตรงข้ามของแกนการหมุน
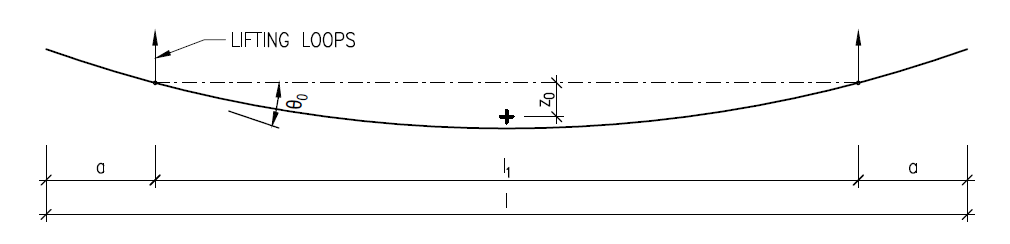
\[ \textsf{\textit{\footnotesize{Fig. 3\qquad Computation of z0 including overhanging ends}}}\]
สมการสำหรับ z0 ได้มาจากการอินทิเกรตรูปร่างของเส้นโค้งการโก่งตัวเพื่อหาจุดเซนทรอยด์
\[z_{0}=\frac{w}{12EI_{y}l}\left( \frac{1}{10}l_{1}^{5}-a^{2}l_{1}^{3}+3a^{4}l_{1}+\frac{6}{5}a^{5} \right)\]
ตัวอย่างสำหรับการเปรียบเทียบ
วัตถุประสงค์ของบทความนี้คือเพื่อแสดงความถูกต้องของการคำนวณเสถียรภาพตามขวางใน IDEA StatiCa Beam สำหรับกรณีการยกคาน เป็นที่น่าสังเกตว่าตัวแก้ปัญหาแบบไม่เชิงเส้นทางเรขาคณิตและวัสดุเดียวกันถูกใช้สำหรับสถานการณ์การออกแบบทั้งหมด โดยเปลี่ยนเพียงเงื่อนไขขอบเขตหรือเงื่อนไขเริ่มต้นเท่านั้น ในฐานะตัวอย่างเพื่อเปรียบเทียบผลลัพธ์กับวิธีการเชิงวิเคราะห์ที่นำเสนอข้างต้น ได้เลือกคานปริซึมหน้าตัด I ที่อัดแรงตรงกลางแบบสมมาตรโดยมีแรงปกติประมาณ Np = 1600 kN คานได้รับการเสริมเหล็กเพิ่มเติมด้วยเหล็กเสริม B500B ตามที่แสดงและทำจากคอนกรีต C40/50 การอัดแรงถูกเลือกเพื่อไม่ให้เกิดรอยแตกร้าวในทุกเงื่อนไขภายใต้การทดสอบ
ไดอะแกรมการออกแบบความเค้น-ความเครียดแบบสองเชิงเส้นถูกใช้สำหรับการวิเคราะห์ในแอปพลิเคชัน ซึ่งสามารถกำหนดโมดูลัสความยืดหยุ่นสำหรับสาขาอิลาสติกได้ง่ายๆ Ecd=fcd/εc3

\[ \textsf{\textit{\footnotesize{Fig. 4\qquad Perspective view of the beam under examination}}}\]
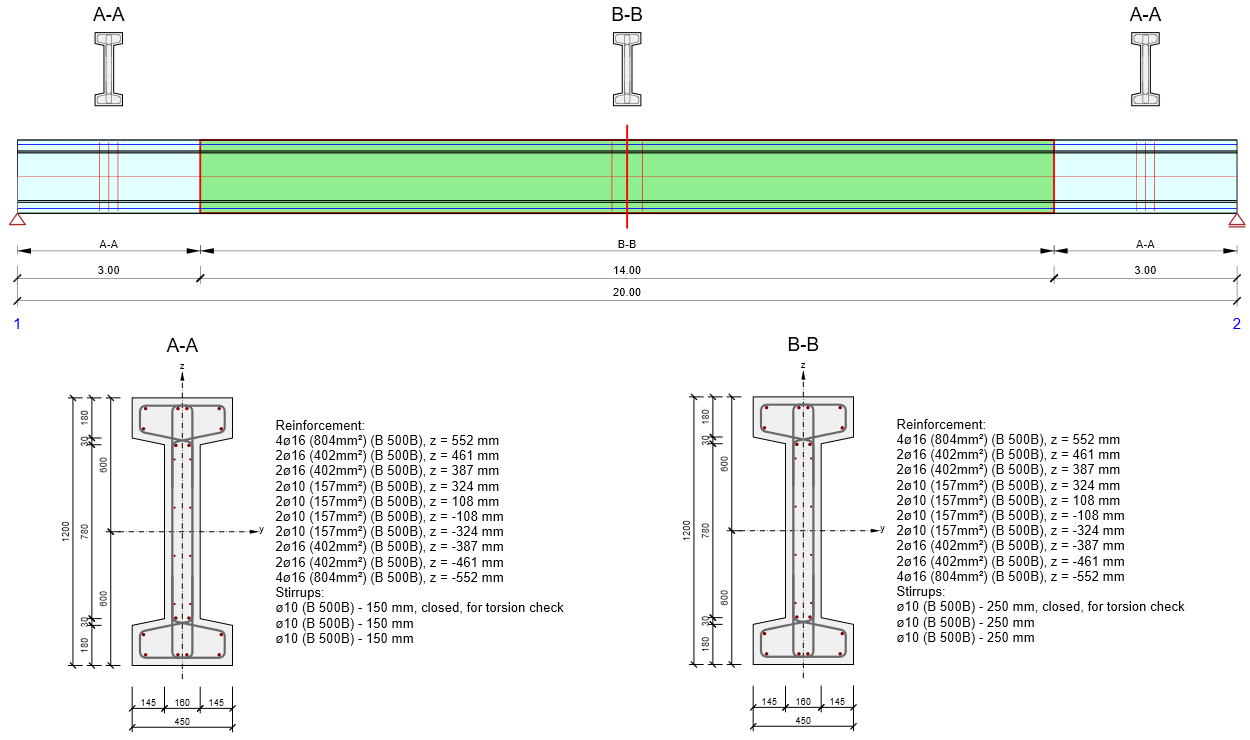
\[ \textsf{\textit{\footnotesize{Fig. 5\qquad Geometry and reinforcement}}}\]
โปรดทราบว่าแกนถูกระบุแตกต่างกันในรูปที่ 5 จากการแนะนำทางทฤษฎีก่อนหน้า ซึ่งการระบุแกนนั้นอ้างอิงจาก [1] และ [2]
คานจะถูกแขวนด้วยตะขอที่มีความสูง hh = 150 mm ซึ่งหมายความว่า yr = 0.5h + hh = 600 + 150 = 750 mm
การคำนวณเชิงวิเคราะห์
หลักการคำนวณได้กล่าวถึงแล้วในตอนต้นของบทความนี้ ขณะนี้เราจะพิจารณาสถานการณ์การออกแบบหนึ่งกรณีอย่างละเอียดและเปรียบเทียบกับผลลัพธ์จากแอปพลิเคชัน บานพับจะถูกวางที่ a = 1.0 m และความเยื้องศูนย์เริ่มต้นจะเป็น eig = 350 mm นี่คือความเยื้องศูนย์เริ่มต้นทางเรขาคณิตของคานที่เสียรูป หมายถึงการโก่งตัวสูงสุดของส่วนโค้ง ดังนั้นจึงไม่ใช่ความเยื้องศูนย์เริ่มต้นของจุดศูนย์ถ่วงจากแกนการหมุน ei ที่ใช้ในการคำนวณด้วยมือข้างต้น ด้วยเหตุผลในทางปฏิบัติ ค่า eig ถูกใช้เป็นข้อมูลนำเข้าสำหรับแอปพลิเคชัน IDEA StatiCa Beam สำหรับทุกกรณีที่พิจารณา ค่า eig ถูกแปลงเป็นค่า ei โดยใช้วิธีกราฟิกในแอปพลิเคชัน CAD

\[ \textsf{\textit{\footnotesize{Fig. 6\qquad Non-iterative approach}}}\]
เนื่องจากเราได้มุม θ > 0.2 rad เราจะตรวจสอบความถูกต้องของผลลัพธ์โดยไม่ใช้การประมาณ θ ≈ sinθ ≈ tanθ ที่กล่าวถึงข้างต้น จากนั้นเราต้องดำเนินการคำนวณแบบวนซ้ำ โดยคำนวณมุมการหมุนเริ่มต้น θi ก่อนและดำเนินการวนซ้ำต่อไปจนกว่าการคำนวณจะมีเสถียรภาพ
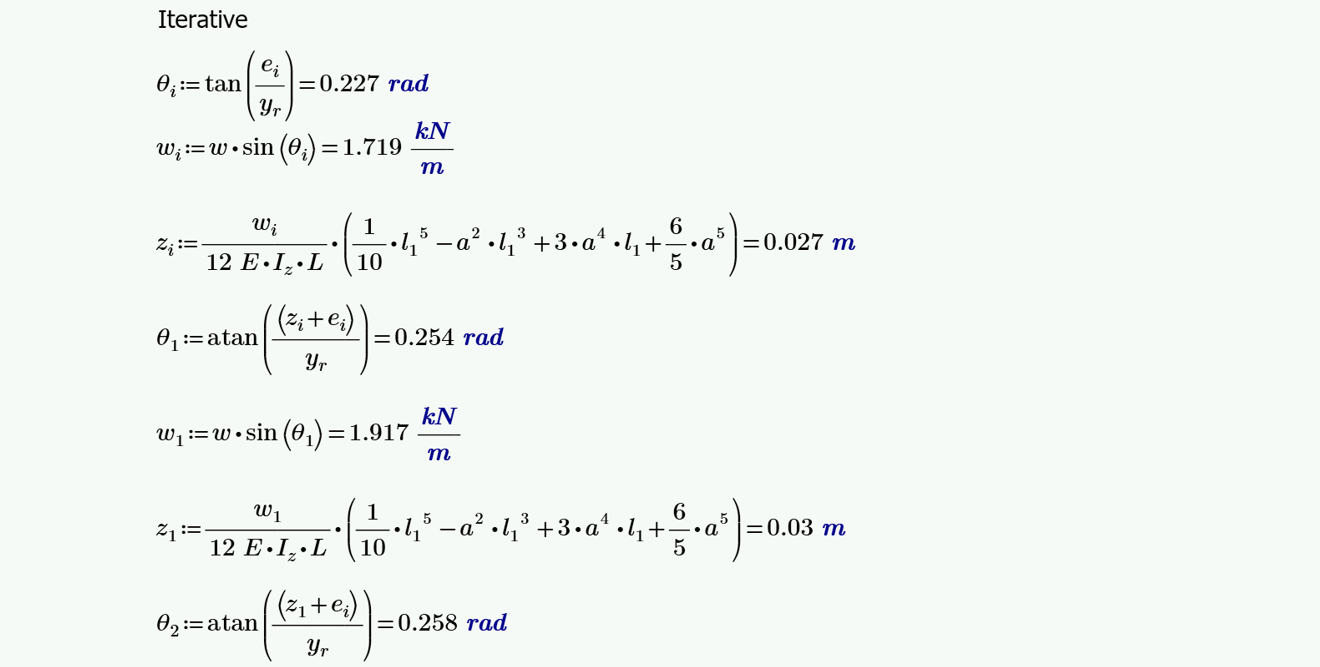
\[ \textsf{\textit{\footnotesize{Fig. 7\qquad Iterative approach}}}\]
ขณะนี้ มาดูว่างานเดียวกันนี้ถูกคำนวณอย่างไรใน IDEA StatiCa Beam และโมดูล Lateral stability ค่าข้อมูลนำเข้าสำหรับการคำนวณแสดงในรูปที่ 8 ค่าสัมประสิทธิ์พลวัตรวมถึงค่าสัมประสิทธิ์การรวมแรงอื่นๆ ถูกกำหนดเป็น 1.0
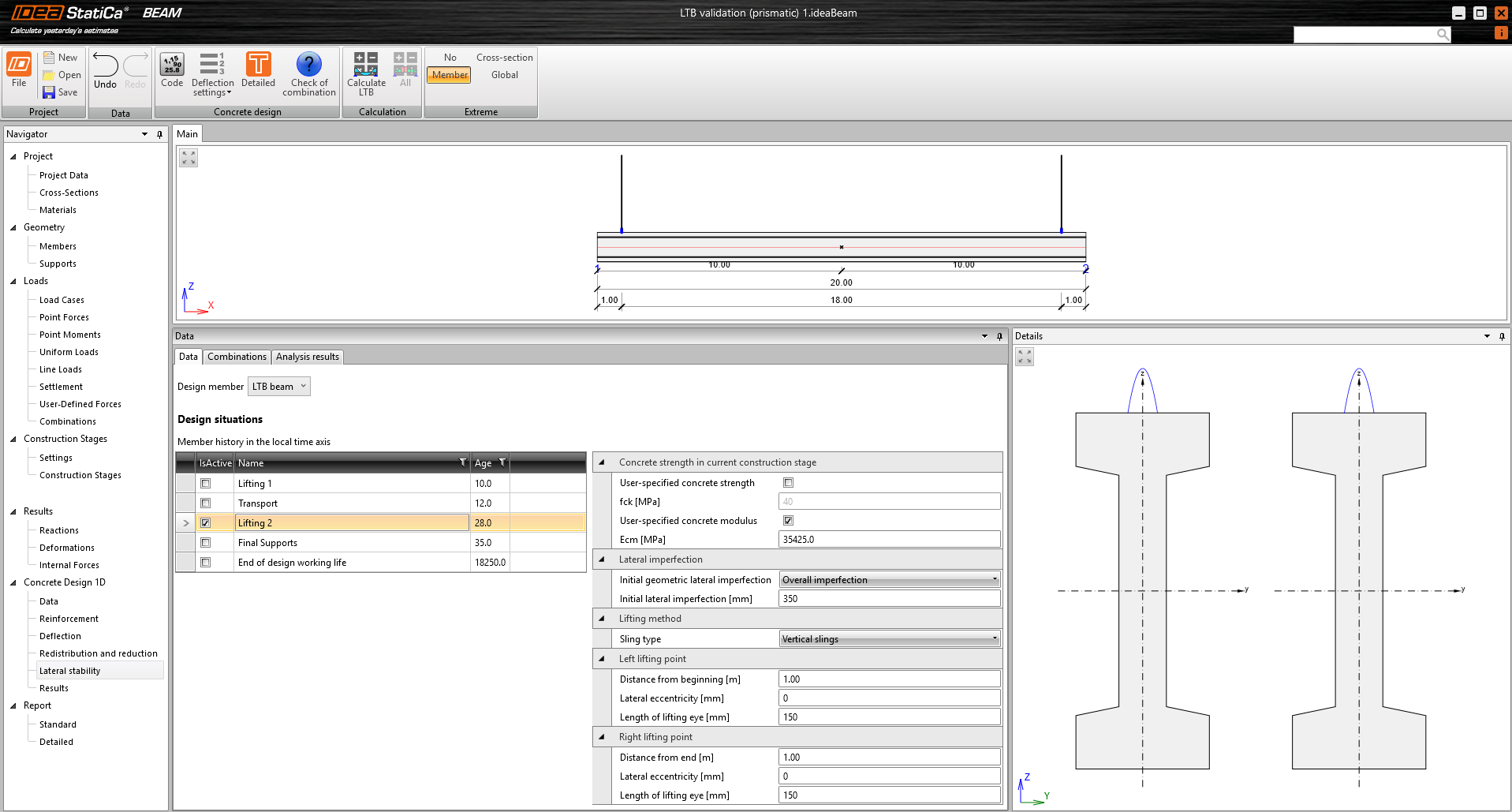
\[ \textsf{\textit{\footnotesize{Fig. 8\qquad Lateral stability data input}}}\]
ผลลัพธ์จาก IDEA StatiCa Beam
เพื่อวัตถุประสงค์ในการตรวจสอบ เราเปรียบเทียบค่าการหมุนของคานเนื่องจากค่านี้เป็นผลลัพธ์พื้นฐานของตัวแก้ปัญหา ผลลัพธ์อื่นๆ เช่น การเสียรูปและแรงภายใน ขึ้นอยู่กับและสัมพันธ์กับการหมุนของคานโดยตรง ขั้นแรก เราพิจารณาการหมุนเริ่มต้น θinit = 220.4 mrad ซึ่งควรสอดคล้องกับค่า θi = 227 mrad จากการคำนวณเชิงวิเคราะห์
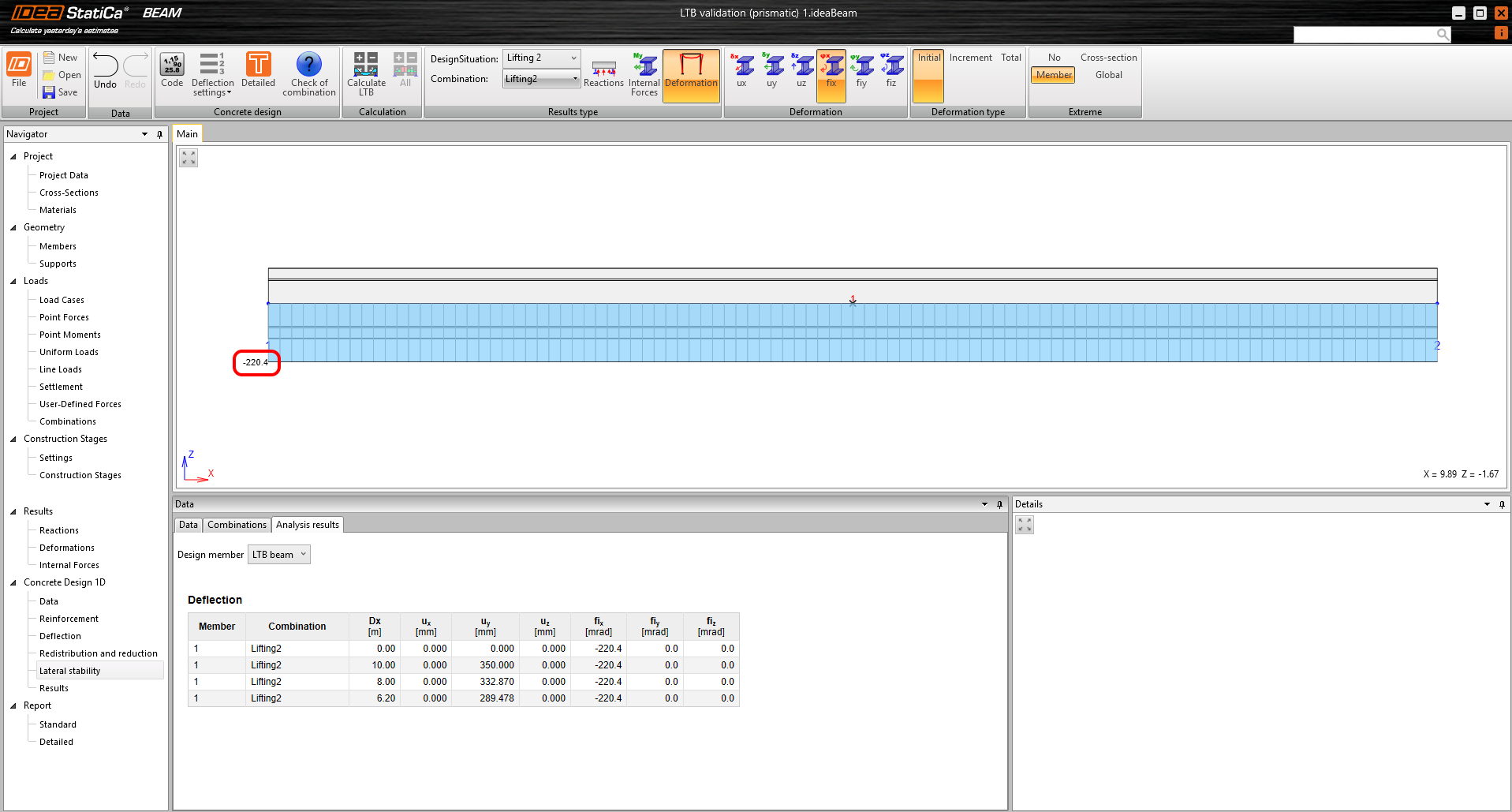
\[ \textsf{\textit{\footnotesize{Fig. 9\qquad Initial rotation}}}\]
สุดท้าย เราสามารถเปรียบเทียบผลลัพธ์ของการหมุนรวมของคาน ซึ่งสามารถเห็นได้ในรูปที่ 10 ค่าที่ทั้งจุดเริ่มต้นของคานและที่กึ่งกลางถูกเน้นไว้ ดังนั้นจึงสามารถสังเกตผลของความแข็งในการหมุนของคาน ซึ่งไม่ได้ถูกจับในการคำนวณเชิงวิเคราะห์
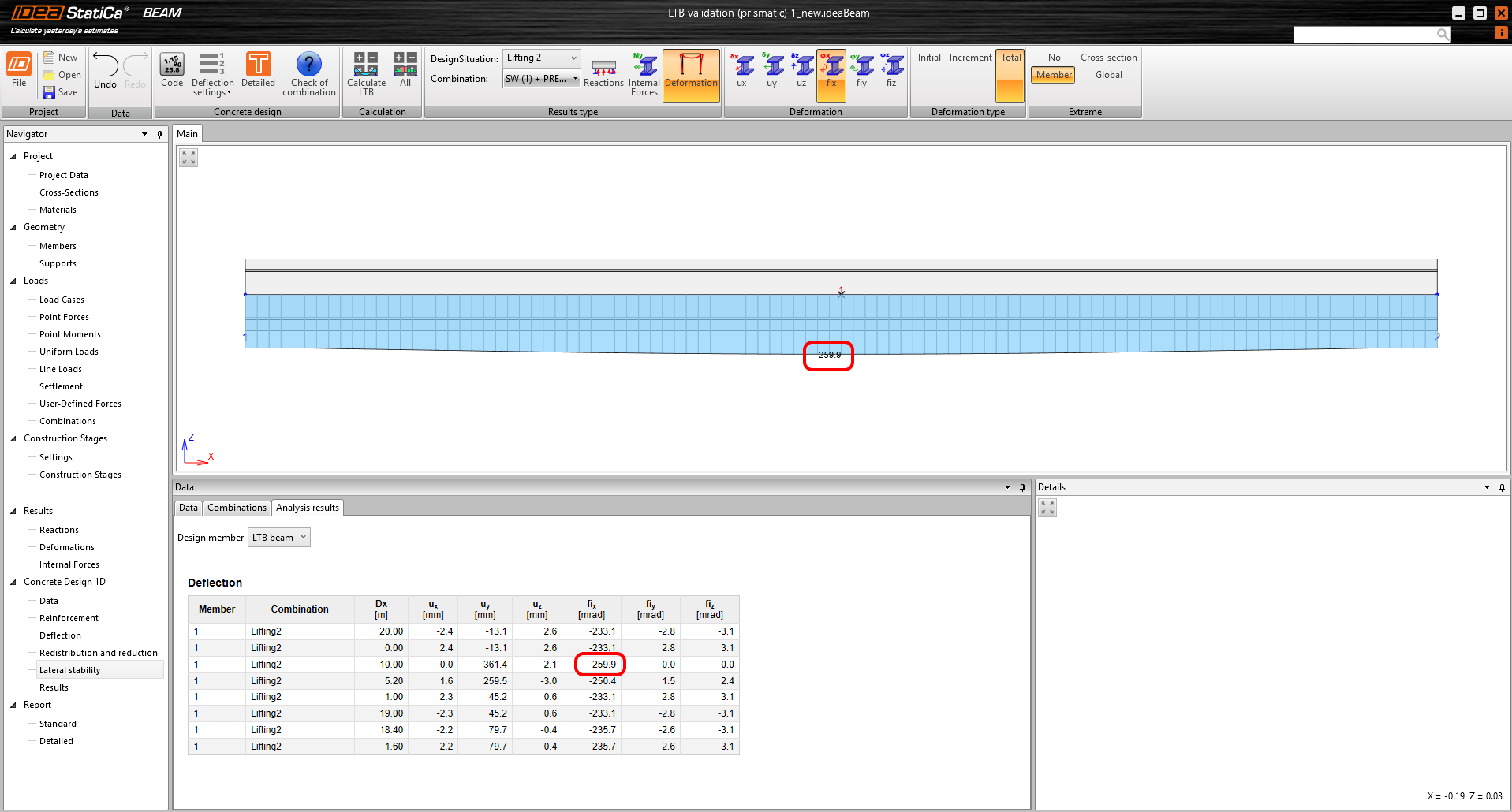
\[ \textsf{\textit{\footnotesize{Fig. 10\qquad Final rotation}}}\]
ตัวอย่างทั้งหมด
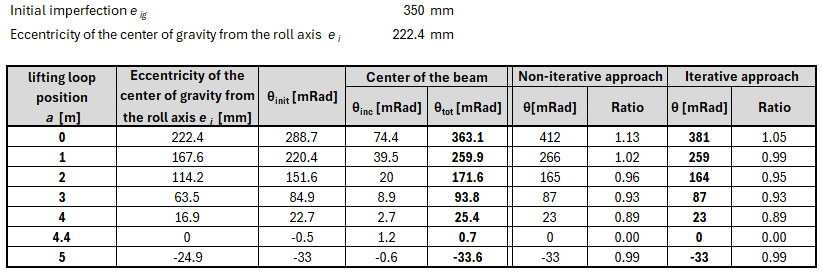
บทนี้นำเสนอโจทย์ทดสอบทั้งหมดสำหรับคานที่ศึกษาด้วยการรวมกันของความไม่สมบูรณ์เริ่มต้นและตำแหน่งห่วงยกที่แตกต่างกัน
θinit คือค่าการหมุนเริ่มต้นที่ได้จากแอปพลิเคชันและควรเปรียบเทียบกับ θi จากการคำนวณเชิงวิเคราะห์ θinc คือส่วนเพิ่มของการหมุนที่คำนวณในแอปพลิเคชันซึ่งเกิดจากการหมุนเพิ่มเติมที่เกิดจากการเสียรูปด้านข้างจากน้ำหนักตัวเอง และ θtot คือการหมุนรวมที่เปรียบเทียบกับค่า θ จากการคำนวณเชิงวิเคราะห์
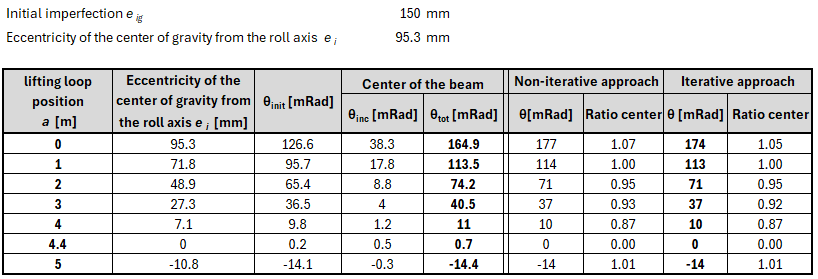
\[ \textsf{\textit{\footnotesize{Fig. 11\qquad Design situation 1}}}\]
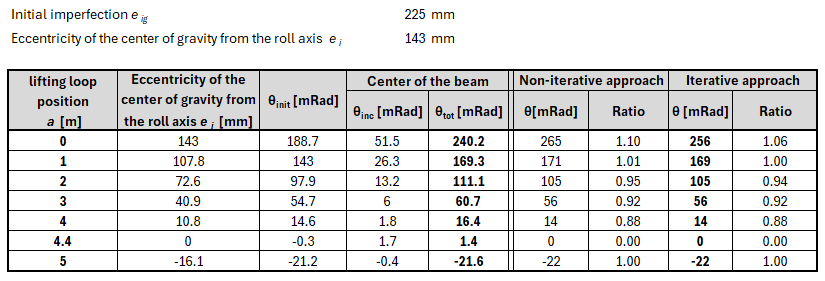
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 2}}}\]
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 3}}}\]
บทสรุป
ในบทความนี้ เราเปรียบเทียบการคำนวณเชิงวิเคราะห์ของเสถียรภาพตามขวางของคานภายใต้สถานการณ์การออกแบบการยกตาม [1] และ [2] กับการวิเคราะห์ FE แบบไม่เชิงเส้นทางวัสดุและเรขาคณิตอย่างสมบูรณ์ที่ดำเนินการใน IDEA StatiCa Beam ผลลัพธ์แสดงให้เห็นว่าการวิเคราะห์ที่ซับซ้อนกว่านั้นมีความแม่นยำสูง เชื่อถือได้ และมีความละเอียดเพียงพอ เนื่องจากความทั่วไปของวิธีการ จึงสามารถครอบคลุมสถานการณ์การออกแบบที่หลากหลายกว่าได้อย่างมากโดยไม่ต้องทำการลดรูปและการคำนวณด้วยมือที่ยุ่งยาก นอกจากนี้เรายังสามารถสังเกตได้ว่าที่ตำแหน่งใดของบานพับที่ตำแหน่งสมดุลถูกบรรลุเพื่อให้คานไม่หมุน ในสภาวะนี้ ส่วนยื่นปลายมีโมเมนต์ที่ทำให้เสถียรเท่ากับโมเมนต์ที่ทำให้ไม่เสถียรจากการโก่งตัวของคาน
เอกสารอ้างอิง
[1] Mast, R. F. (1989). "Lateral Stability of Long Prestressed Concrete Beams, Part 1." PCI J. 34(1), 34–53.
[2] Mast, R. F. (1993). "Lateral Stability of Long Prestressed Concrete Beams, Part 2." PCI J., 38(1), 70–88.