
Kip van lange voorgespannen betonnen balken tijdens het hijsen
Het hijsen van lange voorgespannen betonnen balken is de eerste van de bouwfasen waarbij stabiliteit verloren kan gaan door een mechanisme dat kip wordt genoemd. Aan de kant van de ontwerper worden de elementen doorgaans beoordeeld op laterale stabiliteit in de voltooide constructie, wat niet altijd een maatgevende situatie is, vooral omdat de balken de neiging hebben gestabiliseerd te worden door de dwarse elementen, de vloer of het dak zelf. Stabiliteitsproblemen tijdens de bouw worden overgelaten aan fabrikanten en aannemers. De kipformules die in veel leerboeken worden gevonden, zijn niet algemeen genoeg voor de huidige behoeften en schieten daardoor tekort voor de eisen van de moderne fabrikant, die met name onder druk staat door tijd en materiaalkosten.
In dit verificatieartikel vergelijken we de resultaten van IDEA StatiCa Beam en zijn module voor dwarse stabiliteitsberekening met de analytische berekening uitgewerkt door Robert F. Mast 1989 [1] en Robert F. Mast 1993 [2]. In het eerste deel van de tekst introduceren we de analytische methode in het kort en presenteren we een volledige voorbeeldberekening voor één belastingsgeval, inclusief alle formules en tussenliggende berekeningen. Vervolgens vergelijken we dit met het resultaat uit de applicatie en geven we tot slot een samenvatting van meerdere ontwerpsituaties.
Basistheorie van rolequilibrium
Wanneer een balk hangt aan flexibele ondersteuningen zoals een hijslus, is hij vrij om te rollen. Het rotatiemiddelpunt is het punt waar de flexibele ondersteuning aansluit op het starre lichaam. Een lijn die door het rotatiemiddelpunt bij elke ondersteuning loopt, vormt een rolas. De initiële excentriciteit ei en de verschuiving van de scharnieren plaatsen het zwaartepunt altijd enigszins buiten de rolas. Dit zorgt ervoor dat de balk om de rolas kantelt over een kleine hoek θi.
\[\theta_{i}=tan\left(\frac{e_{i}}{y_{r}}\right)≈\frac{e_{i}}{y_{r}}\]
Dit lichte kantelen zorgt ervoor dat de component van het balkgewicht W sinθi wordt aangebracht in de richting van de zwakke as. De balk buigt vervolgens door, waardoor het zwaartepunt van de massa van de balk verder verschuift. Dit veroorzaakt een toename van de rolhoek θ, wat zowel de laterale belasting als de doorbuiging vergroot. Dit gaat door totdat evenwicht wordt bereikt bij een hoek θ die iets groter is dan θi, of totdat de dwarse doorbuiging groot genoeg is om de balk te vernietigen.

\[ \textsf{\textit{\footnotesize{Fig. 1\qquad Beam free to roll and deflect laterally – perspective}}}\]

\[ \textsf{\textit{\footnotesize{Fig. 2\qquad Beam free to roll and deflect laterally – end view and equilibrium diagram}}}\]
De component van het eigen gewicht die werkt om de zwakke as W sinθi heeft een extra laterale doorbuiging z van het zwaartepunt veroorzaakt. Om de evenwichtshoek θ te vinden, moet men z bepalen, maar z wordt bepaald door de gewichtscomponent W sinθ, die zelf afhankelijk is van θ.
Het probleem kan worden opgelost door eerst een theoretische (fictieve) doorbuiging z0 van het zwaartepunt te berekenen met het volledige gewicht aangebracht om de zwakke as. Omdat de zwakke-ascomponent W sinθ is, kan z vervolgens worden gevonden als z=z0 sinθ. De midoverspanningsdoorbuiging van een gelijkmatig belaste enkelvoudige balk kan worden berekend met de bekende formule:
\[\beta_{y}=\frac{5}{384}\frac{wl^{4}}{EI_{y}}\]
Maar βy is de maximale doorbuiging van de boog van de balk, en we hebben z0 nodig, de afstand van het zwaartepunt van de doorgebogen boog van de balk. z0 is ongeveer 2/3 van βy. Nauwkeuriger:
\[z_{0}=\frac{1}{120}\frac{wl^{4}}{EI_{y}}=0.64\beta_{y}\]
De afleiding van deze formule is te vinden in [1] Bijlage F. De evenwichtsvergelijking kan dan worden herschreven als:
\[tan\theta=\frac{z_{0}sin\theta+e_{i}}{y_{r}}\]
De enige onbekende is nu θ, die kan worden gevonden door successieve benadering. Voor hoeken θ < 0.2 rad mag de benadering θ ≈ sinθ ≈ tanθ worden gebruikt. De evenwichtsvergelijking vereenvoudigt dan tot:
\[\theta=\frac{e_{i}}{y_{r}-z_{0}}\]
Effect van de locatie van het hijspunt
Het plaatsen van het hijspunt zelfs op een kleine afstand van het uiteinde kan de laterale buigstabiliteit aanzienlijk verbeteren. Niet alleen wordt de doorbuiging gereduceerd, met ongeveer een vierde macht van de netto overspanning, maar ook z0 verbetert nog verder, doordat het gewicht in de uitkragende uiteinden aan de tegenovergestelde kant van de rolas ligt.
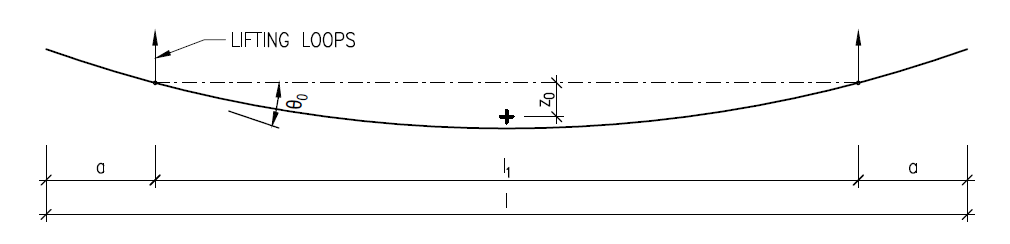
\[ \textsf{\textit{\footnotesize{Fig. 3\qquad Computation of z0 including overhanging ends}}}\]
De vergelijking voor z0 werd verkregen door de vorm van de doorbuigingslijn te integreren om het zwaartepunt te bepalen.
\[z_{0}=\frac{w}{12EI_{y}l}\left( \frac{1}{10}l_{1}^{5}-a^{2}l_{1}^{3}+3a^{4}l_{1}+\frac{6}{5}a^{5} \right)\]
Rekenvoorbeeld ter vergelijking
Het doel van dit artikel is de juistheid van de dwarse stabiliteitsberekeningen in IDEA StatiCa Beam aan te tonen voor het geval van het hijsen van balken. Het is vermeldenswaard dat dezelfde geometrisch en materiaal niet-lineaire solver wordt gebruikt voor alle ontwerpsituaties; alleen de randvoorwaarden of de beginconditie worden gewijzigd. Als voorbeeld om de resultaten te vergelijken met de hierboven gepresenteerde analytische methode, werd een prismatische balk met I-doorsnede gekozen, centrisch voorgespannen zodat de normaalkracht ongeveer Np = 1600 kN bedraagt. De balk is verder gewapend met B500B betonwapening zoals weergegeven en is vervaardigd van C40/50 beton. De voorspanning is zodanig gekozen dat er onder geen enkele testconditie scheurvorming optreedt.
Voor de analyse in de applicatie wordt een bi-lineair spanning-rek rekendiagram gebruikt, waarbij het mogelijk is de elasticiteitsmodulus voor de elastische tak eenvoudig te bepalen als Ecd=fcd/εc3.

\[ \textsf{\textit{\footnotesize{Fig. 4\qquad Perspective view of the beam under examination}}}\]
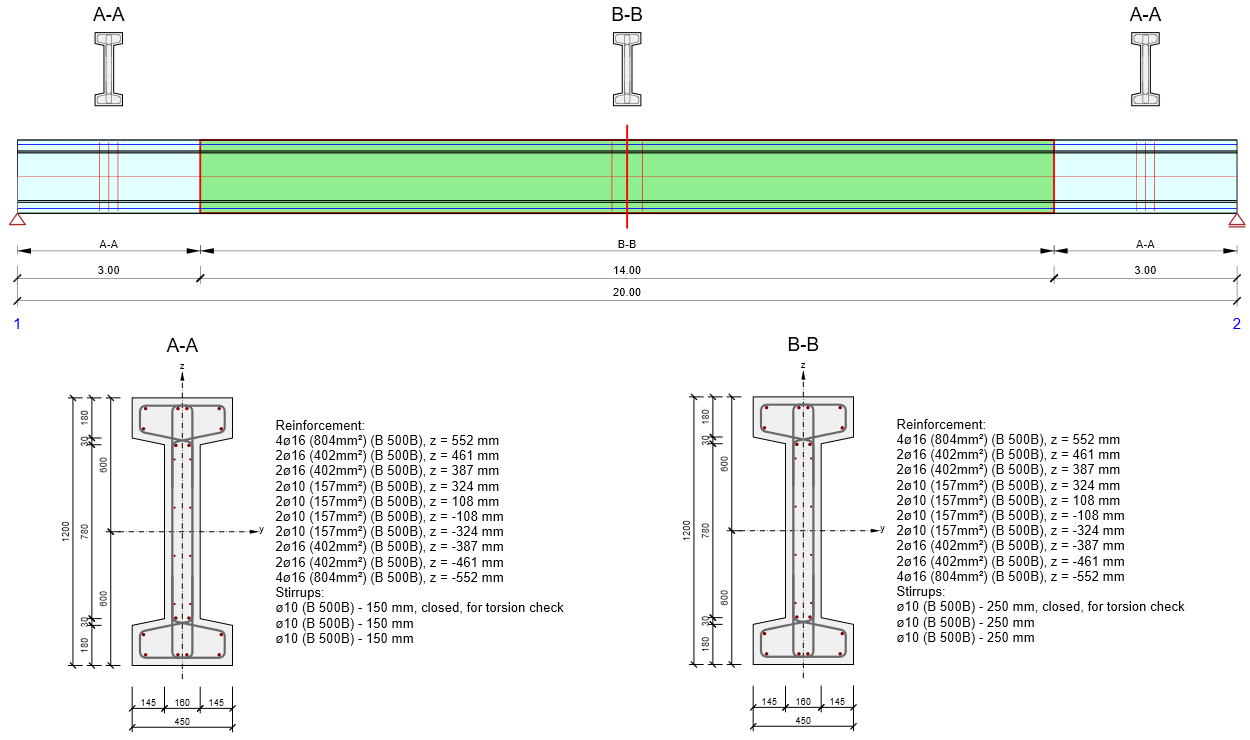
\[ \textsf{\textit{\footnotesize{Fig. 5\qquad Geometry and reinforcement}}}\]
Let op dat de assen in Figuur 5 anders zijn gelabeld dan in de voorgaande theoretische inleiding, waar de labeling was gebaseerd op [1] en [2]
De balk wordt opgehangen aan haken met hoogte hh = 150 mm. Dit betekent dat yr = 0.5h + hh = 600 + 150 = 750 mm.
Analytische berekening
Het berekeningsprincipe is al aan het begin van dit artikel vermeld. Nu zullen we een van de ontwerpsituaties in detail bekijken en vergelijken met het resultaat uit de applicatie. De scharnieren worden geplaatst op a = 1.0 m en de initiële excentriciteit bedraagt eig = 350 mm. Dit is de geometrische initiële excentriciteit van de vervormde balk, bedoeld als de maximale doorbuiging van de boog. Het is daarom niet de initiële excentriciteit van het zwaartepunt ten opzichte van de rolas ei die wordt gebruikt in de handberekeningen hierboven. Om praktische redenen wordt de waarde eig gebruikt als invoer voor de IDEA StatiCa Beam applicatie. Voor alle beschouwde gevallen werd de waarde eig omgezet naar de waarde ei met behulp van de grafische methode in de CAD-applicatie.

\[ \textsf{\textit{\footnotesize{Fig. 6\qquad Non-iterative approach}}}\]
Omdat we een hoek θ > 0.2 rad hebben verkregen, controleren we de juistheid van de resultaten zonder gebruik te maken van de bovengenoemde benadering θ ≈ sinθ ≈ tanθ. We moeten dan verdergaan met de iteratieve berekening, waarbij we eerst de initiële rolhoek θi berekenen en iteratief doorgaan totdat de berekening stabiel is.
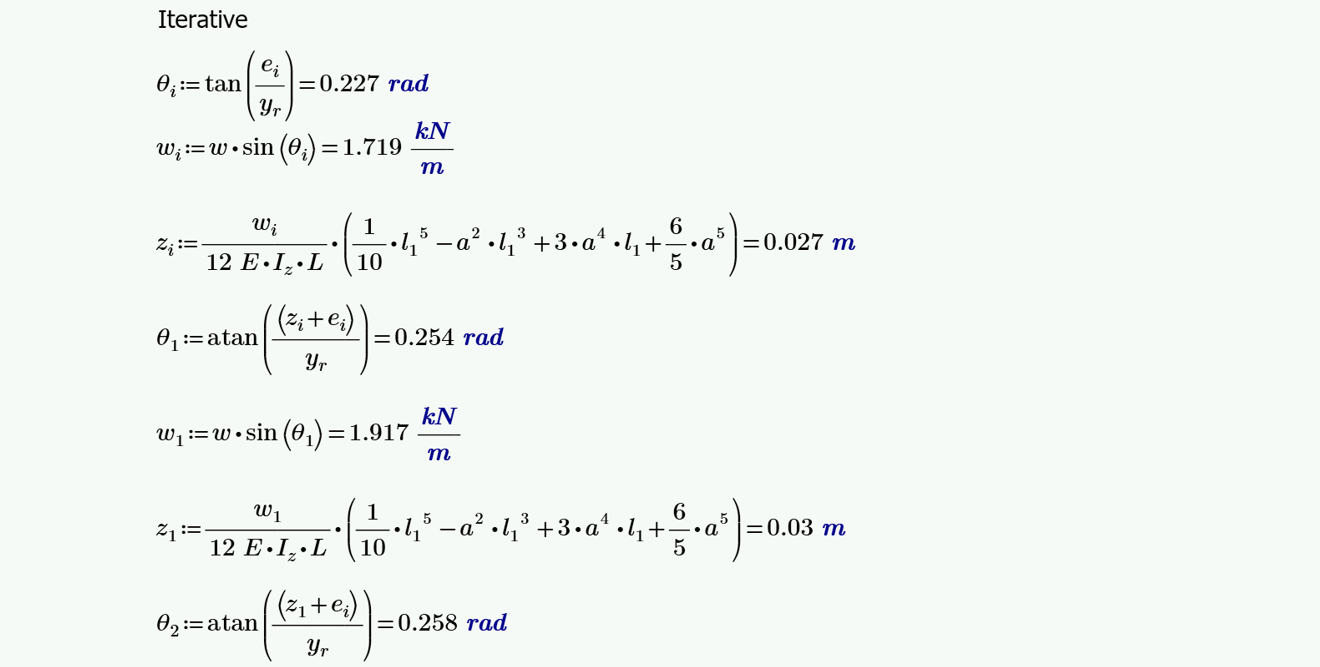
\[ \textsf{\textit{\footnotesize{Fig. 7\qquad Iterative approach}}}\]
Laten we nu bekijken hoe dezelfde taak werd berekend in IDEA StatiCa Beam en zijn module Laterale stabiliteit. De invoerwaarden voor de berekening zijn weergegeven in Figuur 8. De dynamische coëfficiënt evenals de overige combinatiecoëfficiënten zijn ingesteld op 1.0.
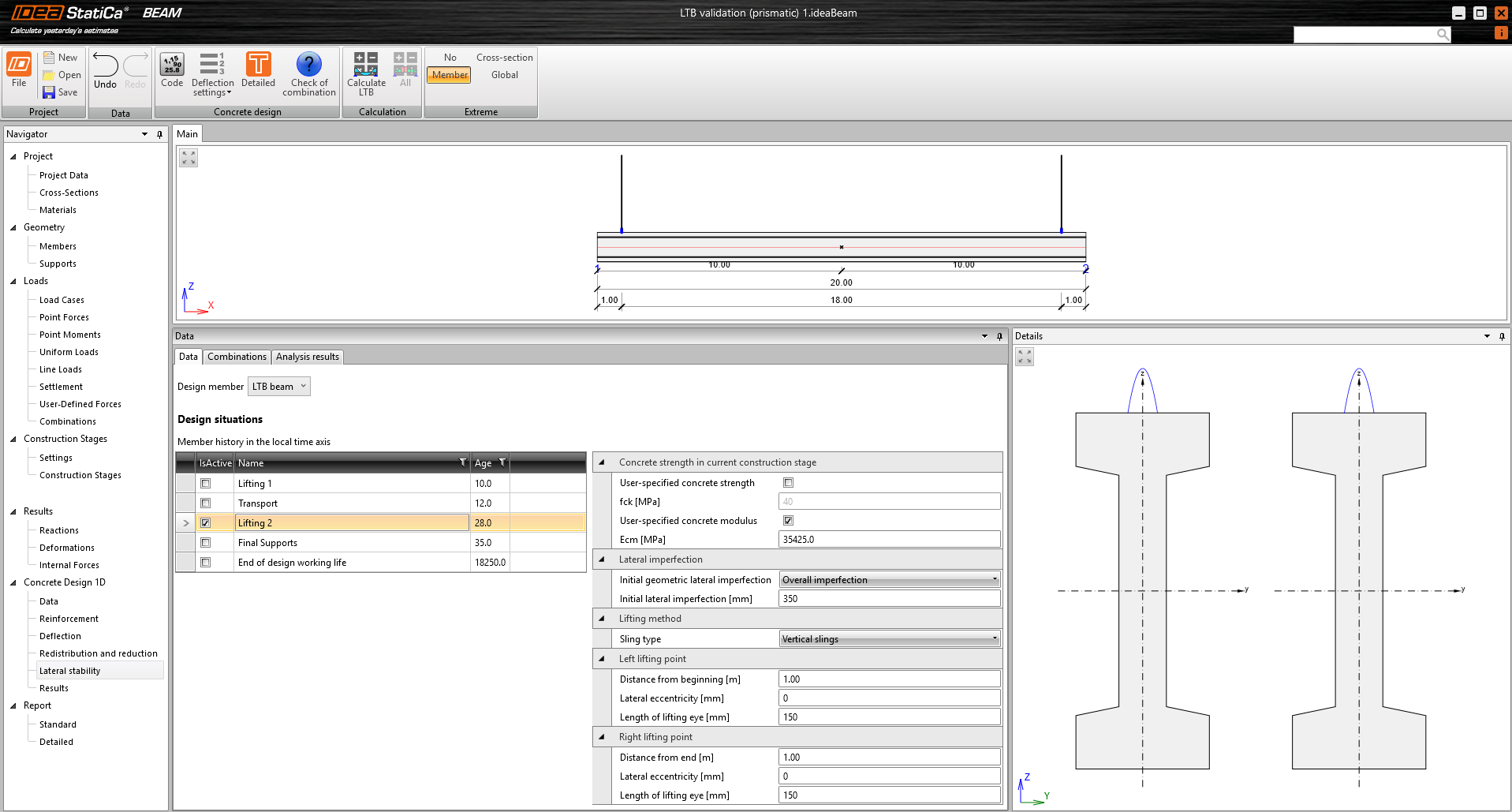
\[ \textsf{\textit{\footnotesize{Fig. 8\qquad Lateral stability data input}}}\]
IDEA StatiCa Beam resultaten
Voor verificatiedoeleinden vergelijken we de waarde van de balkrotatie, omdat deze waarde de basisuitvoer van de solver is. Andere uitvoerwaarden, zoals vervorming en inwendige krachten, zijn hier direct van afhankelijk en aan gerelateerd. Eerst bekijken we de initiële rotatie θinit = 220.4 mrad, die overeen moet komen met de waarde θi = 227 mrad uit de analytische berekening.
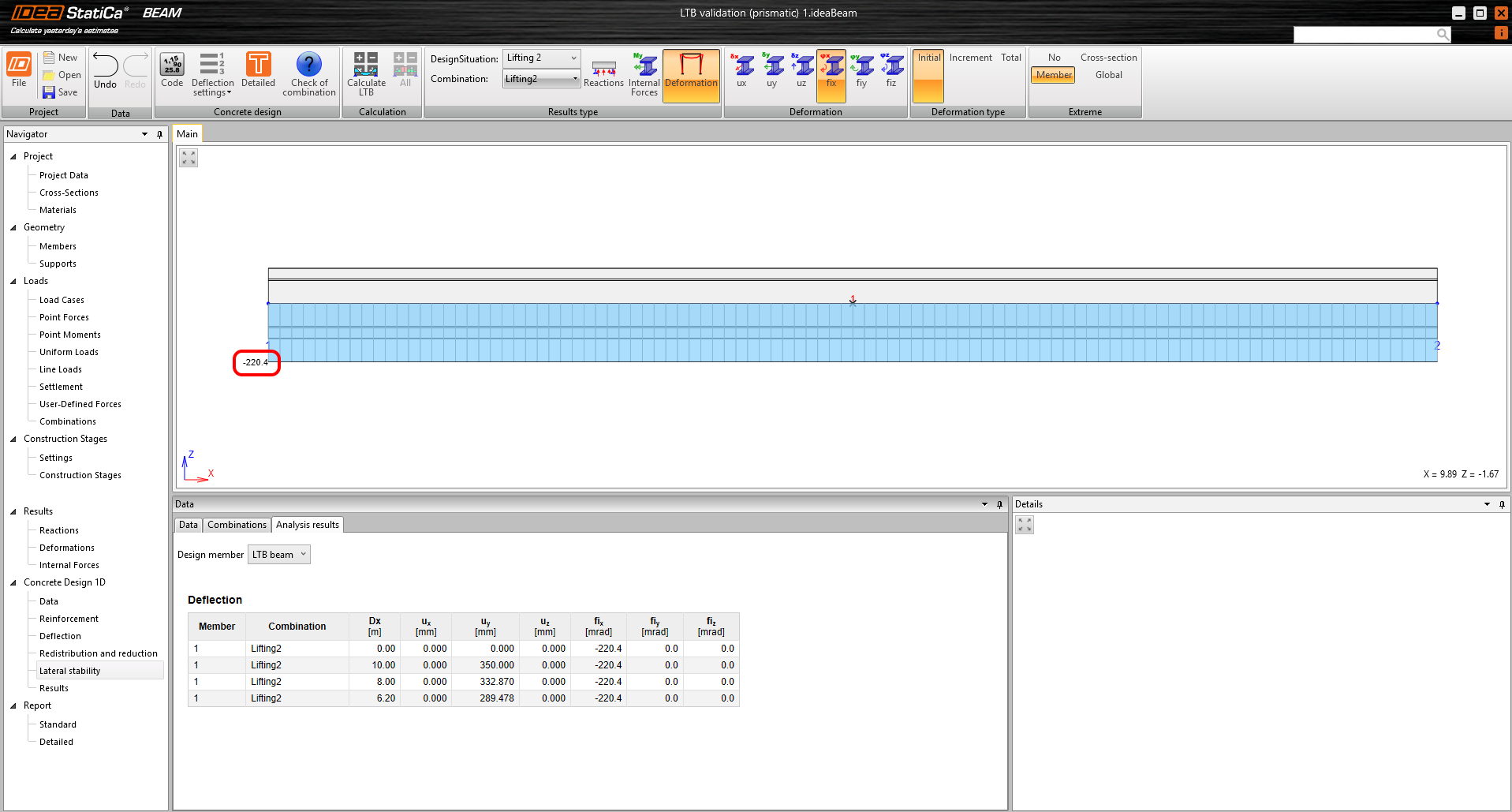
\[ \textsf{\textit{\footnotesize{Fig. 9\qquad Initial rotation}}}\]
Tot slot kunnen we de resultaten van de totale balkrotatie vergelijken, zoals te zien in Figuur 10. De waarden aan zowel het begin van de balk als in het midden zijn gemarkeerd. Het is daardoor mogelijk het effect van de rotatiestijfheid van de balk te observeren, wat niet wordt meegenomen in de analytische berekening.
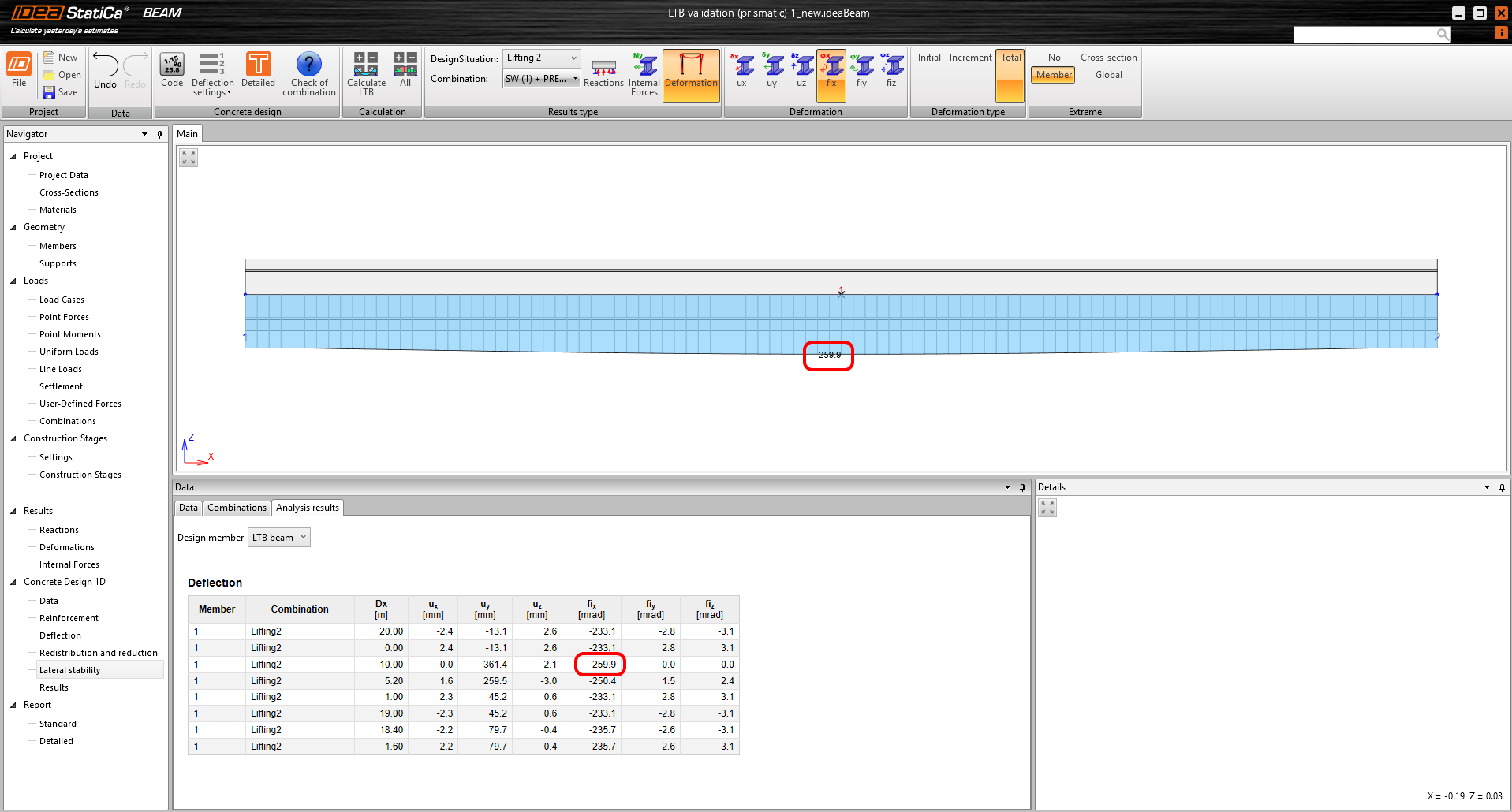
\[ \textsf{\textit{\footnotesize{Fig. 10\qquad Final rotation}}}\]
Alle voorbeelden
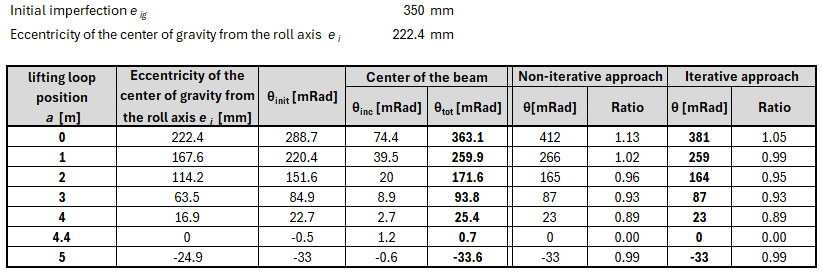
Dit hoofdstuk presenteert alle geteste opgaven voor de bestudeerde balk met verschillende combinaties van initiële imperfectie en hijslusposities.
θinit is de waarde van de initiële rotatie verkregen uit de applicatie en dient te worden vergeleken met θi uit de analytische berekening. θinc is de rotatie-increment berekend in de applicatie, veroorzaakt door de extra rotatie als gevolg van laterale vervorming door eigen gewicht, en θtot is de resulterende rotatie vergeleken met de waarde θ uit de analytische berekening.
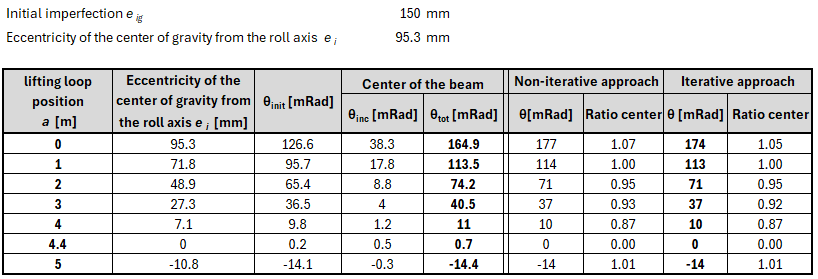
\[ \textsf{\textit{\footnotesize{Fig. 11\qquad Design situation 1}}}\]
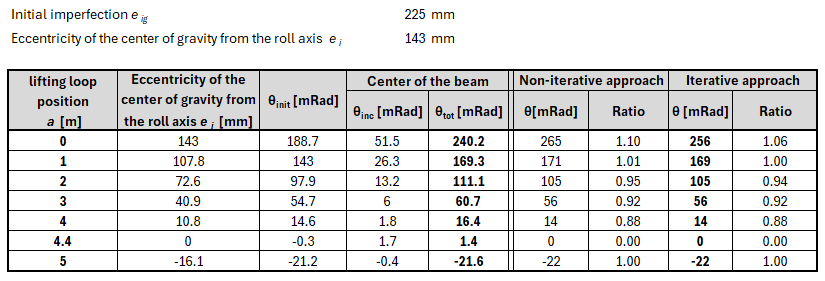
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 2}}}\]
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 3}}}\]
Conclusie
In dit artikel hebben we de analytische berekeningen van de dwarse stabiliteit van balken onder het ontwerpscenario hijsen volgens [1] en [2] vergeleken met de volledig materiaal- en geometrisch niet-lineaire EE-analyse uitgevoerd in IDEA StatiCa Beam. De resultaten tonen aan dat de meer geavanceerde analyse zeer nauwkeurig, betrouwbaar en voldoende precies is gebleken. Vanwege de algemeenheid ervan kan het ook een aanzienlijk groter portfolio aan ontwerpsituaties omvatten zonder vereenvoudiging en tijdrovende handberekeningen. We kunnen ook waarnemen bij welke positie van de scharnieren de evenwichtspositie is bereikt, zodat de balk niet roteert. In deze toestand hebben de uitkragende uiteinden een stabiliserend moment dat gelijk is aan het destabiliserend moment van de doorgebogen balk.
Referenties
[1] Mast, R. F. (1989). "Lateral Stability of Long Prestressed Concrete Beams, Part 1." PCI J. 34(1), 34–53.
[2] Mast, R. F. (1993). "Lateral Stability of Long Prestressed Concrete Beams, Part 2." PCI J., 38(1), 70–88.