
Seitliche Stabilität langer vorgespannter Betonträger beim Heben
Das Heben langer vorgespannter Betonträger ist die erste der Bauphasen, in der die Stabilität durch einen Mechanismus verloren gehen kann, der als Biegedrillknicken bezeichnet wird. Auf der Seite des Planers werden die Bauteile in der Regel für die seitliche Stabilität am fertigen Tragwerk bemessen, was nicht immer eine maßgebende Bedingung darstellt, insbesondere da die Träger durch die Querelemente, die Decke oder das Dach selbst stabilisiert werden. Stabilitätsprobleme während der Konstruktion werden den Herstellern und Auftragnehmern überlassen. Die in vielen Lehrbüchern enthaltenen Formeln für das seitliche Knicken sind für die heutigen Anforderungen nicht allgemein genug und decken daher nicht die Anforderungen des modernen Herstellers ab, der insbesondere durch Zeit- und Materialdruck getrieben wird.
In diesem Verifikationsbeitrag vergleichen wir die Ergebnisse aus IDEA StatiCa Beam und seinem Modul zur Berechnung der Querstabilität mit der analytischen Berechnung nach Robert F. Mast 1989 [1] und Robert F. Mast 1993 [2]. Im ersten Teil des Textes stellen wir die analytische Methode kurz vor und präsentieren eine vollständige Beispielberechnung für einen Lastfall, einschließlich aller Formeln und Zwischenberechnungen. Anschließend vergleichen wir dies mit dem Ergebnis aus der Anwendung und geben abschließend eine Zusammenfassung mehrerer Bemessungssituationen.
Grundlegende Theorie des Rollgleichgewichts
Wenn ein Träger an flexiblen Auflagern wie einer Hebeschlaufe hängt, kann er sich frei drehen. Der Drehpunkt ist der Punkt, an dem das flexible Auflager mit dem starren Körper verbunden ist. Eine Linie, die durch den Drehpunkt an jedem Auflager verläuft, bildet eine Rollachse. Die anfängliche Exzentrizität ei und der Versatz der Gelenke platzieren den Schwerpunkt stets leicht außerhalb der Rollachse. Dies bewirkt, dass der Träger um die Rollachse um einen kleinen Winkel θi kippt.
\[\theta_{i}=tan\left(\frac{e_{i}}{y_{r}}\right)≈\frac{e_{i}}{y_{r}}\]
Dieses leichte Kippen bewirkt, dass die Komponente des Trägergewichts W sinθi in Richtung der schwachen Achse wirkt. Der Träger wird dann gebogen, was den Schwerpunkt der Trägermasse weiter verschiebt. Dies führt zu einer Zunahme des Rollwinkels θ, was sowohl die seitliche Last als auch die Durchbiegung erhöht. Dies setzt sich fort, bis ein Gleichgewicht bei einem Winkel θ erreicht wird, der etwas größer als θi ist, oder bis die Querauslenkung ausreicht, um den Träger zu zerstören.

\[ \textsf{\textit{\footnotesize{Fig. 1\qquad Beam free to roll and deflect laterally – perspective}}}\]

\[ \textsf{\textit{\footnotesize{Fig. 2\qquad Beam free to roll and deflect laterally – end view and equilibrium diagram}}}\]
Die Komponente des Eigengewichts, die um die schwache Achse wirkt W sinθi, hat eine zusätzliche seitliche Durchbiegung z des Schwerpunkts verursacht. Um den Gleichgewichtswinkel θ zu finden, muss z bestimmt werden, aber z wird durch die Gewichtskomponente W sinθ bestimmt, die selbst von θ abhängt.
Das Problem kann gelöst werden, indem zunächst eine theoretische (fiktive) Durchbiegung z0 des Schwerpunkts berechnet wird, wobei das volle Gewicht um die schwache Achse angesetzt wird. Da die Komponente der schwachen Achse W sinθ beträgt, kann z als z=z0 sinθ bestimmt werden. Die Feldmittendurchbiegung eines gleichmäßig belasteten Einfeldträgers kann mit der bekannten Formel berechnet werden:
\[\beta_{y}=\frac{5}{384}\frac{wl^{4}}{EI_{y}}\]
Aber βy ist die maximale Durchbiegung des Trägerbogens, und wir benötigen z0, also den Abstand des Schwerpunkts des ausgelenkten Trägerbogens. z0 beträgt näherungsweise 2/3 von βy. Genauer:
\[z_{0}=\frac{1}{120}\frac{wl^{4}}{EI_{y}}=0.64\beta_{y}\]
Die Herleitung dieser Formel findet sich in [1] Anhang F. Die Gleichgewichtsgleichung kann dann wie folgt umgeschrieben werden:
\[tan\theta=\frac{z_{0}sin\theta+e_{i}}{y_{r}}\]
Die einzige Unbekannte ist nun θ, die durch sukzessive Näherung bestimmt werden kann. Für Winkel θ < 0,2 rad kann die Näherung θ ≈ sinθ ≈ tanθ verwendet werden. Die Gleichgewichtsgleichung vereinfacht sich dann zu:
\[\theta=\frac{e_{i}}{y_{r}-z_{0}}\]
Einfluss der Lage des Hebepunkts
Bereits eine geringe Verschiebung des Hebepunkts vom Ende des Trägers kann die seitliche Biegestabilität erheblich verbessern. Nicht nur wird die Durchbiegung um etwa die vierte Potenz der Nettostützweite reduziert, sondern z0 verbessert sich noch weiter, da das Gewicht in den auskragenden Enden auf der gegenüberliegenden Seite der Rollachse liegt.
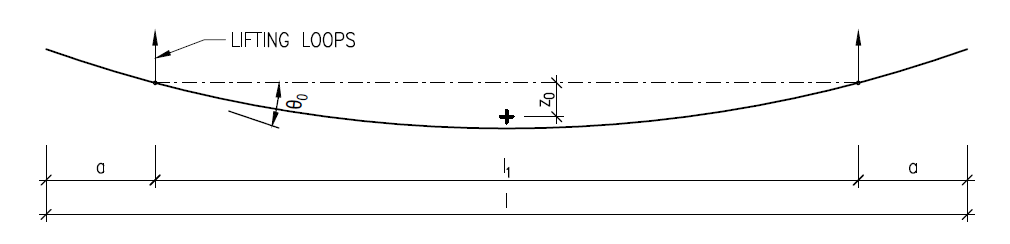
\[ \textsf{\textit{\footnotesize{Fig. 3\qquad Computation of z0 including overhanging ends}}}\]
Die Gleichung für z0 wurde durch Integration der Form der Biegelinie zur Bestimmung ihres Schwerpunkts ermittelt.
\[z_{0}=\frac{w}{12EI_{y}l}\left( \frac{1}{10}l_{1}^{5}-a^{2}l_{1}^{3}+3a^{4}l_{1}+\frac{6}{5}a^{5} \right)\]
Vergleichsbeispiel
Ziel dieses Beitrags ist es, die Korrektheit der Querstabilitätsberechnungen in IDEA StatiCa Beam für den Fall des Trägeranhebens nachzuweisen. Es ist erwähnenswert, dass für alle Bemessungssituationen derselbe geometrisch und materiell nichtlineare Löser verwendet wird; lediglich die Randbedingungen oder die Anfangsbedingung werden geändert. Als Vergleichsbeispiel mit der oben vorgestellten analytischen Methode wurde ein prismatischer Träger mit I-Querschnitt gewählt, der zentrisch vorgespannt ist, sodass die Normalkraft näherungsweise Np = 1600 kN beträgt. Der Träger ist zusätzlich mit B500B-Betonbewehrung wie dargestellt bewehrt und besteht aus C40/50-Beton. Die Vorspannung ist so gewählt, dass unter keiner der untersuchten Bedingungen eine Rissbildung auftritt.
Für die Analyse in der Anwendung wird ein bilineares Spannung-Dehnung-Bemessungsdiagramm verwendet, bei dem der Elastizitätsmodul für den elastischen Ast einfach als Ecd=fcd/εc3 bestimmt werden kann.

\[ \textsf{\textit{\footnotesize{Fig. 4\qquad Perspective view of the beam under examination}}}\]
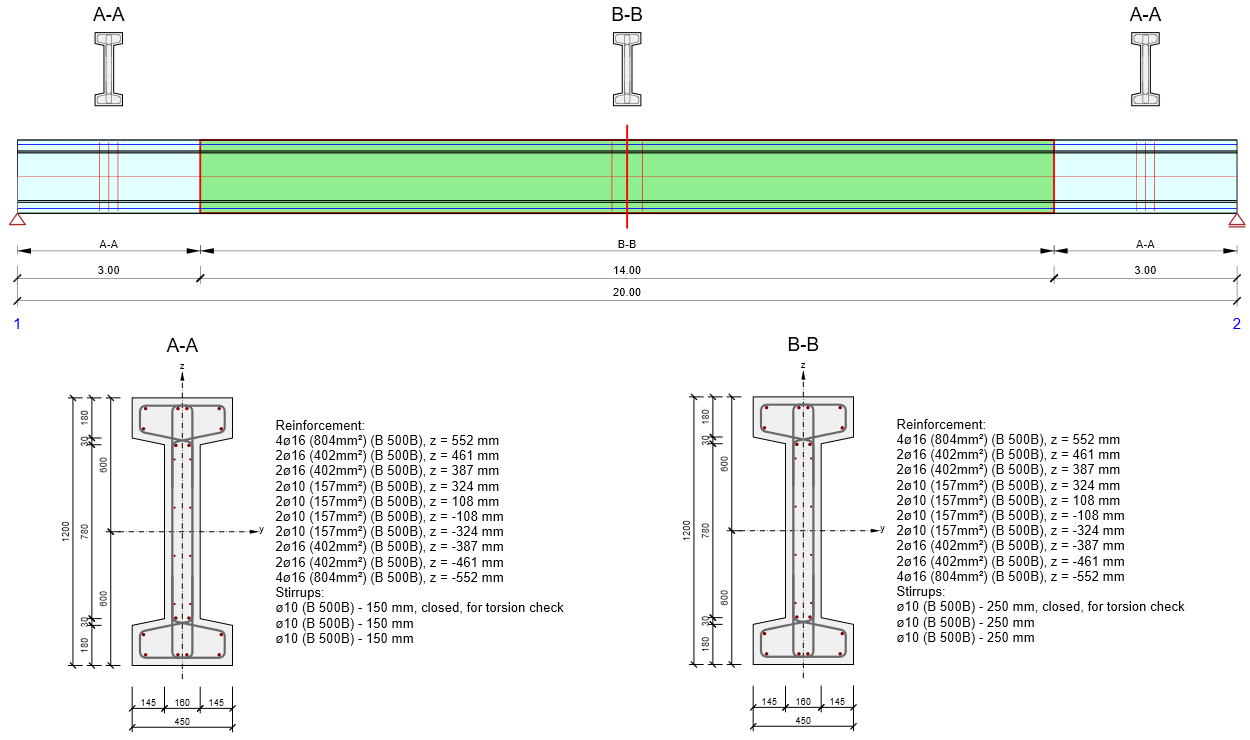
\[ \textsf{\textit{\footnotesize{Fig. 5\qquad Geometry and reinforcement}}}\]
Bitte beachten Sie, dass die Achsen in Abbildung 5 anders beschriftet sind als in der vorangegangenen theoretischen Einführung, wo die Beschriftung auf [1] und [2] basierte.
Der Träger wird an Haken mit der Höhe hh = 150 mm aufgehängt. Das bedeutet, dass yr = 0,5h + hh = 600 + 150 = 750 mm.
Analytische Berechnung
Das Berechnungsprinzip wurde bereits zu Beginn dieses Artikels erläutert. Nun werden wir eine der Bemessungssituationen detailliert betrachten und sie mit dem Ergebnis aus der Anwendung vergleichen. Die Gelenke werden bei a = 1,0 m angeordnet, und die anfängliche Exzentrizität beträgt eig = 350 mm. Dies ist die geometrische Anfangsexzentrizität des verformten Trägers, gemeint als maximale Durchbiegung des Bogens. Es handelt sich daher nicht um die anfängliche Exzentrizität des Schwerpunkts von der Rollachse ei, die in den obigen manuellen Berechnungen verwendet wird. Aus praktischen Gründen wird der Wert eig als Eingabe für die IDEA StatiCa Beam-Anwendung verwendet. Für alle betrachteten Fälle wurde der Wert eig mithilfe der grafischen Methode in der CAD-Anwendung in den Wert ei umgerechnet.

\[ \textsf{\textit{\footnotesize{Fig. 6\qquad Non-iterative approach}}}\]
Da wir nun einen Winkel θ > 0,2 rad erhalten haben, überprüfen wir die Korrektheit der Ergebnisse ohne Verwendung der oben genannten Näherung θ ≈ sinθ ≈ tanθ. Wir müssen dann mit der iterativen Berechnung fortfahren, bei der wir zunächst den anfänglichen Rollwinkel θi berechnen und iterativ fortfahren, bis die Berechnung stabil ist.
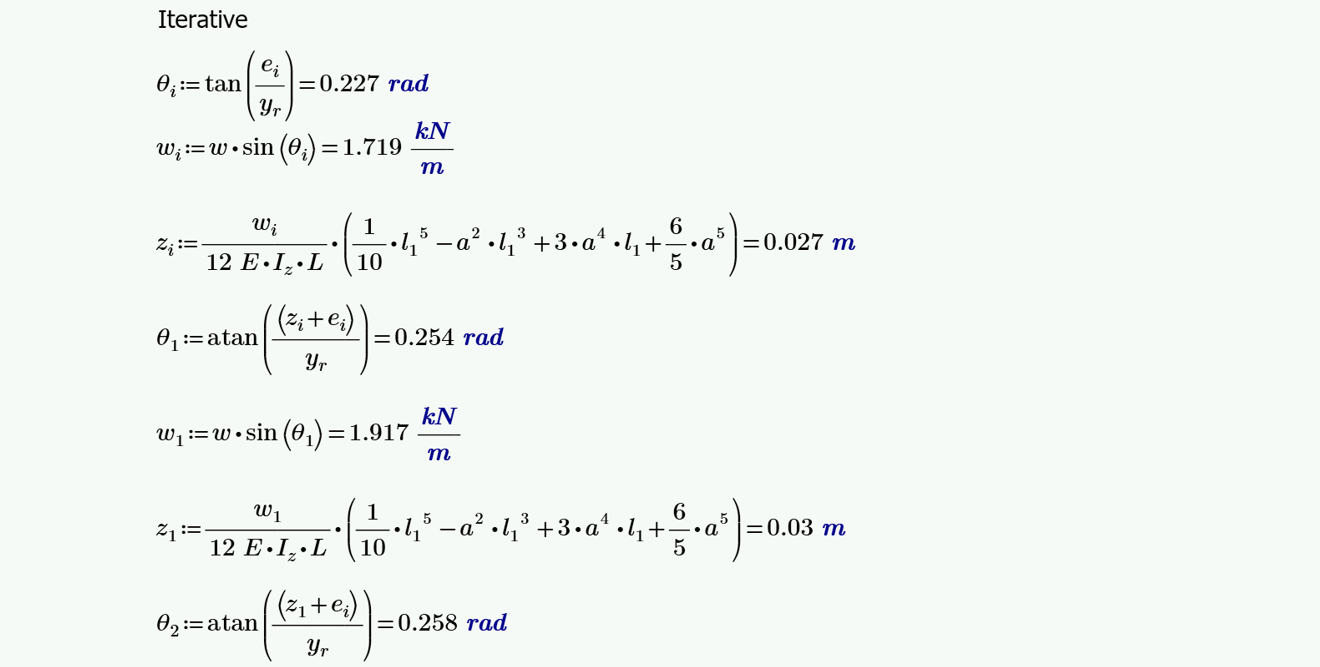
\[ \textsf{\textit{\footnotesize{Fig. 7\qquad Iterative approach}}}\]
Sehen wir uns nun an, wie dieselbe Aufgabe in IDEA StatiCa Beam und seinem Modul für seitliche Stabilität berechnet wurde. Die Eingabewerte für die Berechnung sind in Abbildung 8 dargestellt. Der dynamische Beiwert sowie die übrigen Kombinationsbeiwerte sind auf 1,0 gesetzt.
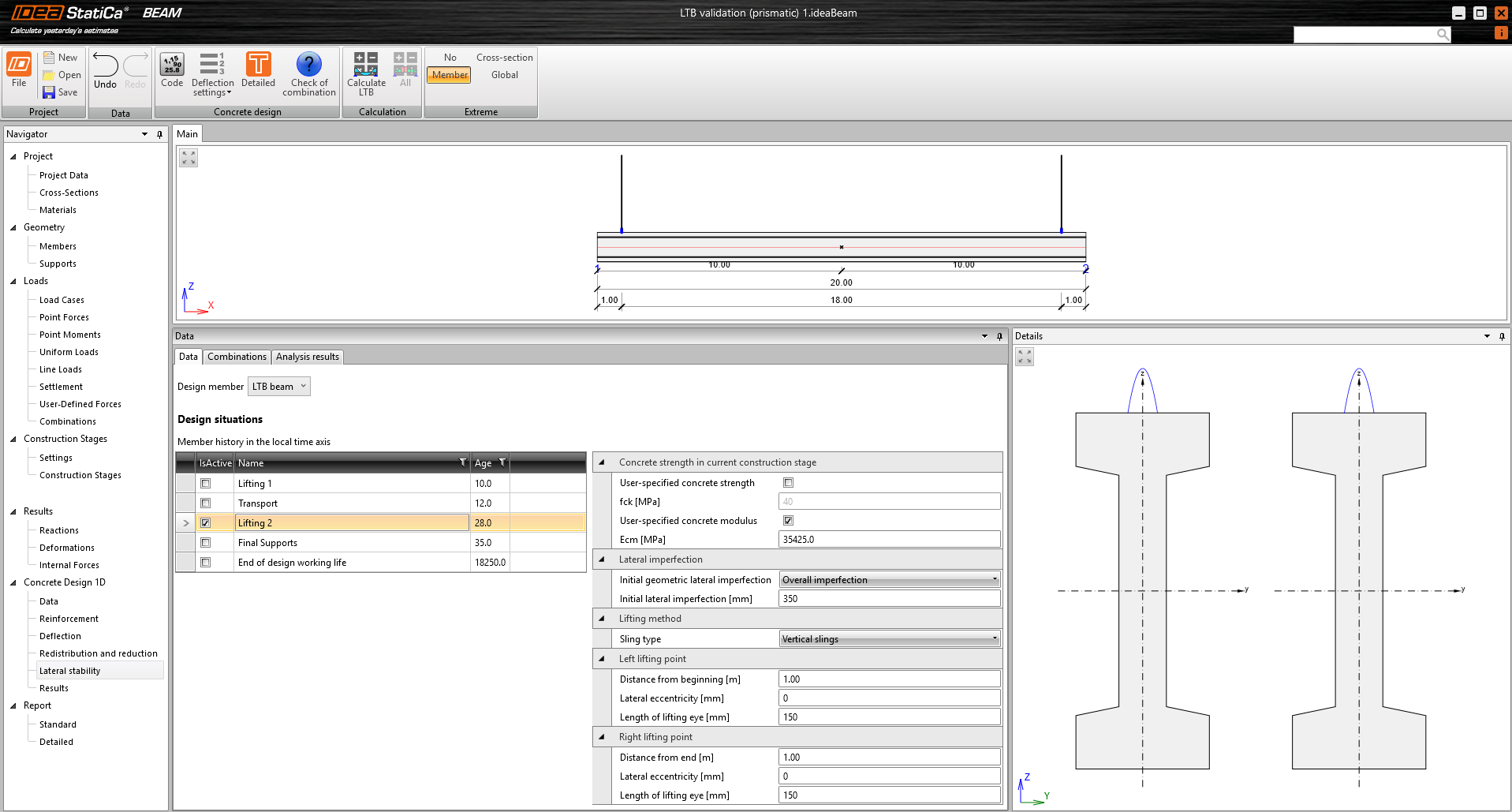
\[ \textsf{\textit{\footnotesize{Fig. 8\qquad Lateral stability data input}}}\]
IDEA StatiCa Beam Ergebnisse
Zu Verifikationszwecken vergleichen wir den Wert der Trägerdrehung, da dieser Wert die grundlegende Ausgabe des Lösers ist. Andere Ausgaben, wie Verformung und Schnittgrößen, sind direkt davon abhängig und damit verbunden. Zunächst betrachten wir die anfängliche Drehung θinit = 220,4 mrad, die dem Wert θi = 227 mrad aus der analytischen Berechnung entsprechen sollte.
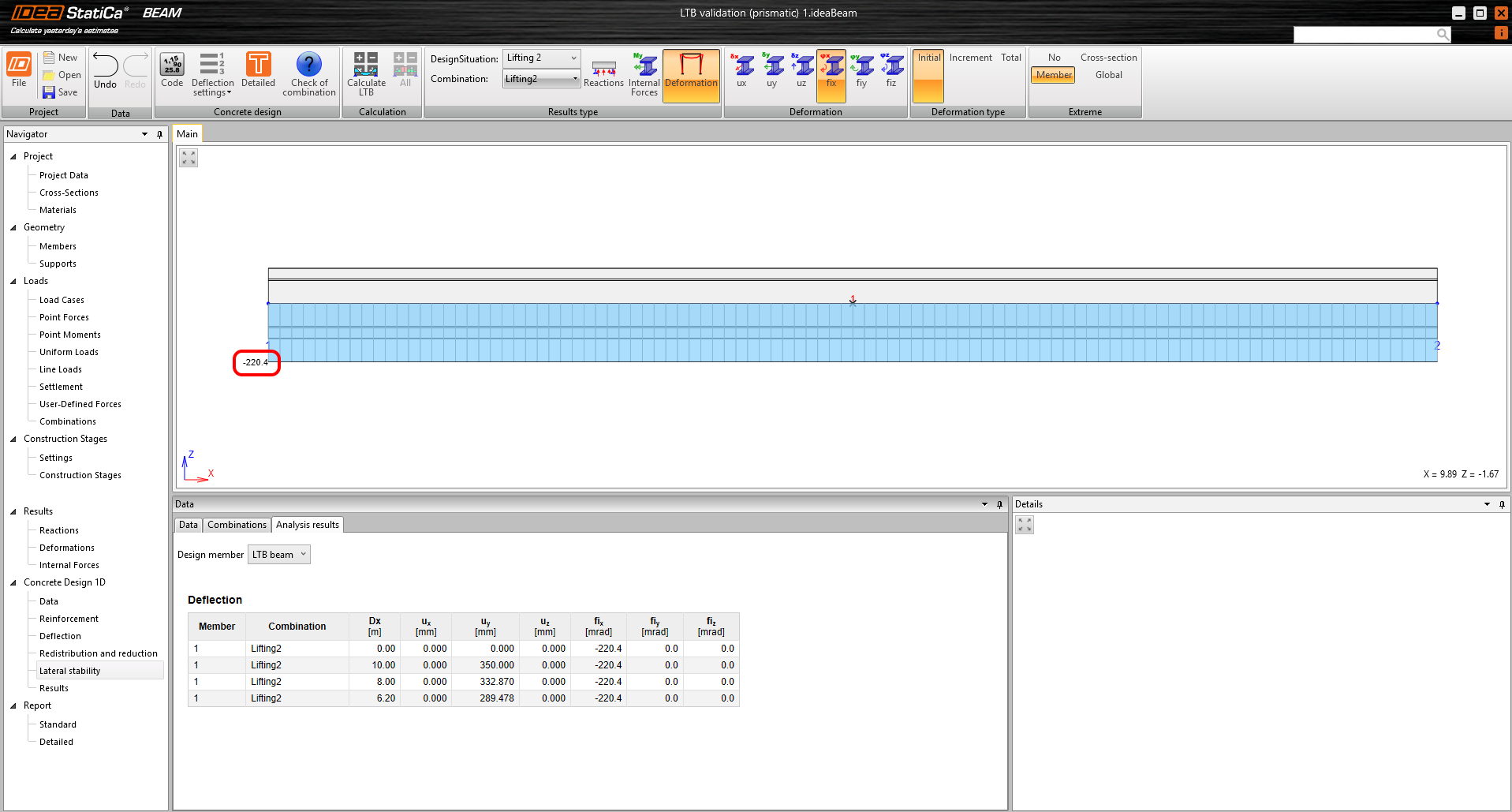
\[ \textsf{\textit{\footnotesize{Fig. 9\qquad Initial rotation}}}\]
Abschließend können wir die Ergebnisse der Gesamtträgerdrehung vergleichen, die in Abbildung 10 dargestellt sind. Die Werte sowohl am Trägeranfang als auch in seiner Mitte sind hervorgehoben. Es ist daher möglich, den Einfluss der Torsionssteifigkeit des Trägers zu beobachten, der durch die analytische Berechnung nicht erfasst wird.
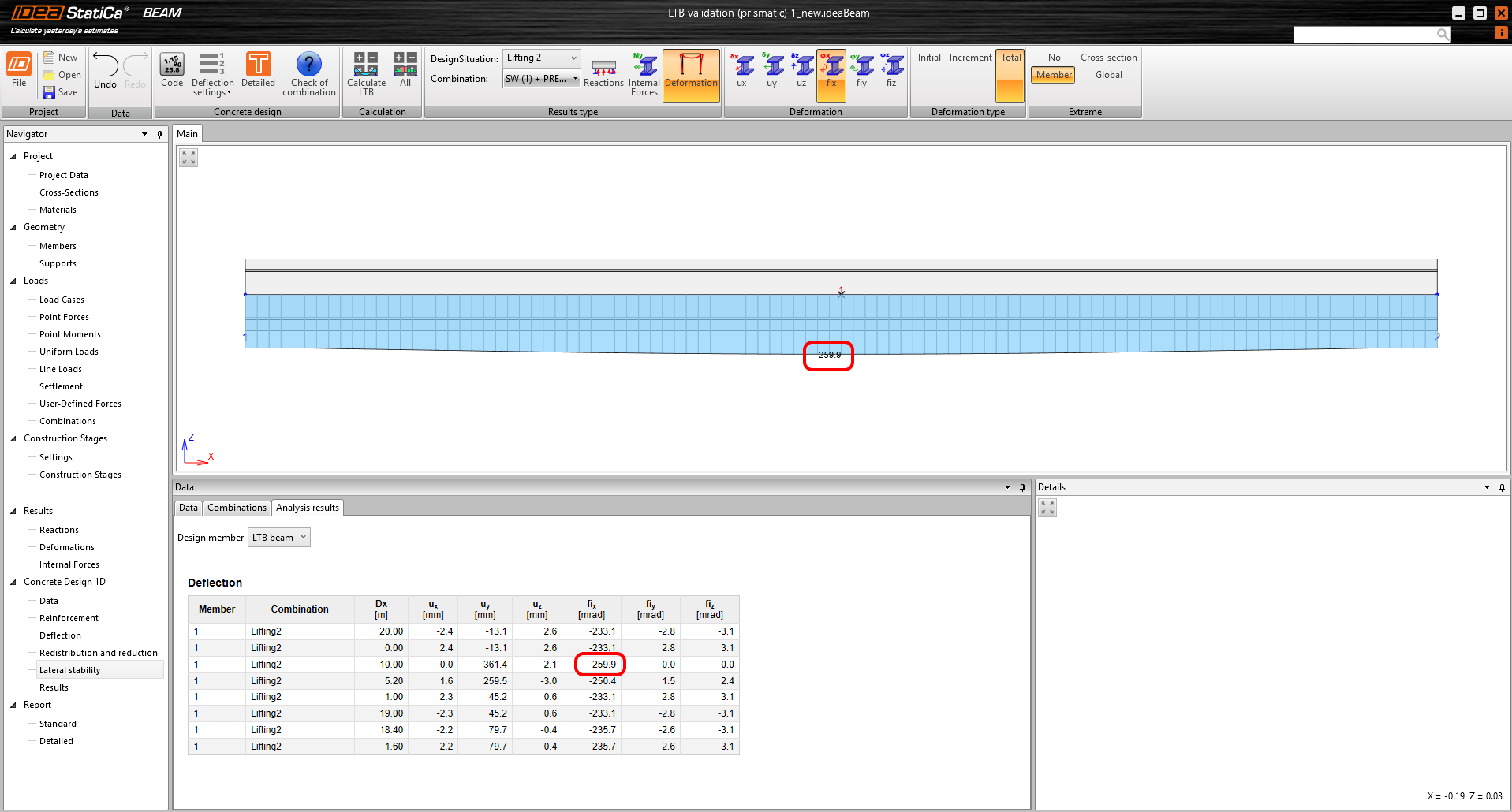
\[ \textsf{\textit{\footnotesize{Fig. 10\qquad Final rotation}}}\]
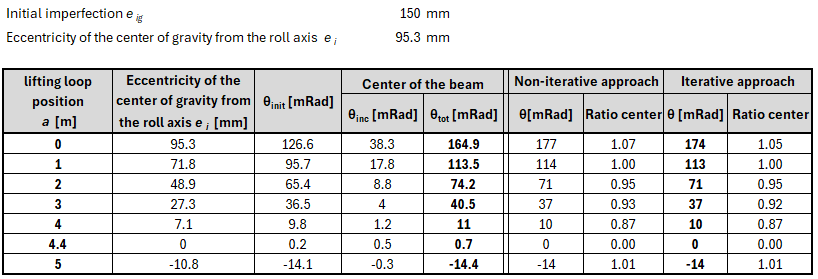
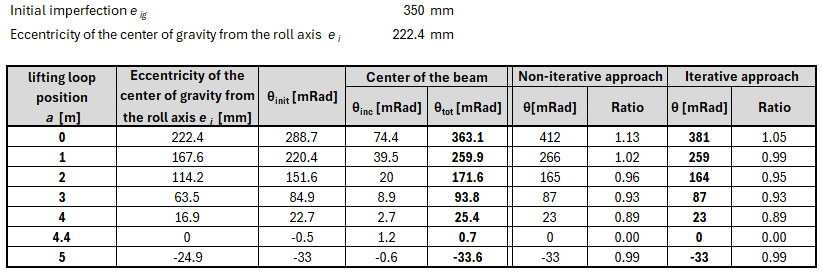
Alle Beispiele
Dieses Kapitel stellt alle getesteten Aufgabenstellungen für den untersuchten Träger mit verschiedenen Kombinationen aus anfänglicher Imperfektion und Hebeschlaufenpositionen vor.
θinit ist der Wert der anfänglichen Drehung, der aus der Anwendung ermittelt wird, und sollte mit θi aus der analytischen Berechnung verglichen werden. θinc ist der in der Anwendung berechnete Drehungszuwachs, der durch die zusätzliche Drehung infolge der seitlichen Verformung aus dem Eigengewicht verursacht wird, und θtot ist die resultierende Drehung, verglichen mit dem Wert θ aus der analytischen Berechnung.
\[ \textsf{\textit{\footnotesize{Fig. 11\qquad Design situation 1}}}\]
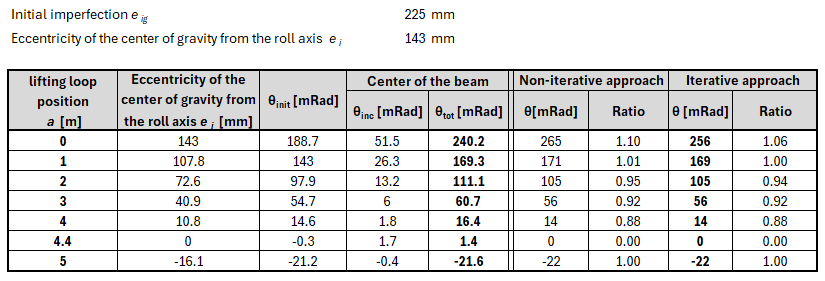
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 2}}}\]
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 3}}}\]
Schlussfolgerung
In diesem Beitrag haben wir die analytischen Berechnungen der Querstabilität von Trägern unter dem Bemessungsszenario Heben gemäß [1] und [2] mit der vollständig material- und geometrisch nichtlinearen FE-Analyse verglichen, die in IDEA StatiCa Beam durchgeführt wurde. Die Ergebnisse zeigen, dass die anspruchsvollere Analyse sehr genau, zuverlässig und hinreichend präzise ist. Aufgrund ihrer Allgemeinheit kann sie auch ein deutlich größeres Portfolio an Bemessungssituationen ohne Vereinfachungen und aufwändige manuelle Berechnungen abdecken. Wir können auch beobachten, bei welcher Position der Gelenke die Gleichgewichtslage erreicht wird, sodass der Träger sich nicht dreht. In diesem Zustand haben die auskragenden Enden ein stabilisierendes Moment, das dem destabilisierenden Moment aus der Durchbiegung des Trägers entspricht.
Literatur
[1] Mast, R. F. (1989). "Lateral Stability of Long Prestressed Concrete Beams, Part 1." PCI J. 34(1), 34–53.
[2] Mast, R. F. (1993). "Lateral Stability of Long Prestressed Concrete Beams, Part 2." PCI J., 38(1), 70–88.