볼트 및 프리로드 볼트 연결
볼트
CBFEM(구성요소 기반 유한요소법)에서 볼트는 인장, 전단력 및 지압 거동을 종속 비선형 스프링으로 표현되는 구성요소입니다. 볼트 조립체는 볼트, 와셔 및 너트로 구성되며, 비선형 스프링, 강체 요소 및 갭 요소로 시뮬레이션됩니다.
인장 볼트
인장 볼트는 초기 축 강성, 설계값 저항력, 항복 개시 및 변형 능력을 갖는 스프링으로 표현됩니다. 초기 축 강성은 VDI2230 지침 및 Agerskov (1976)에서 해석적으로 유도됩니다.
\[D_{Lb} =\frac{L_s+0.4d_b}{EA_{s}}+ \frac{0.85d_b}{EA_{t}}\]
\[A_{pp}=\frac{0.75D_H(L_w-D_H)}{D_{W1}^2-D_{W2}^2}\]
\[A_{P1}=\frac{\pi}{4}(D_H^2-D_{W1}^2)\]
\[A_{P2}=\frac{1}{2}(D_{W2}^2-D_H^2)\tan^{-1}A_{pp}\]
\[A_P=A_{P1}+A_{P2}\]
\[D_{LW}=\frac{L_W}{EA_P}\]
\[k=\frac{1}{D_{LB}+D_{LW}}\]
여기서:
- \(d_b\) – 볼트 직경
- \(D_H\) – 볼트 머리 직경
- \(D_{W1}\) – 와셔 내경
- \(D_{W2}\) – 와셔 외경
- \(L_W\) – 와셔 두께의 합
- \(L_s\) – 볼트 그립 길이
- \(A_{s}\) – 볼트 총 단면적
- \(A_{t}\) – 볼트 인장 응력 단면적
- \(E\) – 영 탄성계수
이 모델은 실험 데이터와 일치합니다(Gödrich et al. (2014) 참조). 항복 개시 및 변형 능력에 대해서는 소성 변형이 볼트 생크의 나사부에서만 발생한다고 가정합니다.
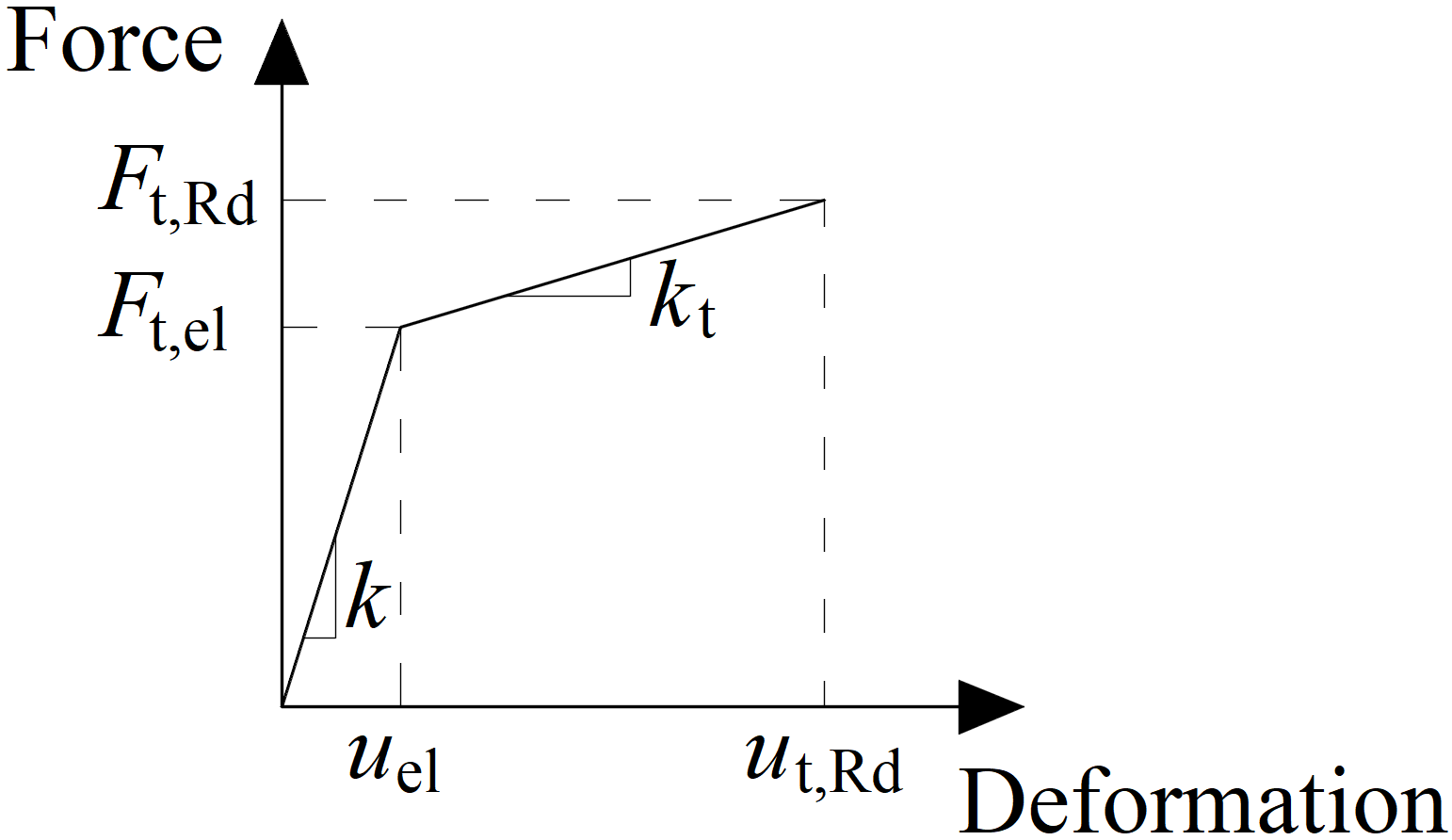
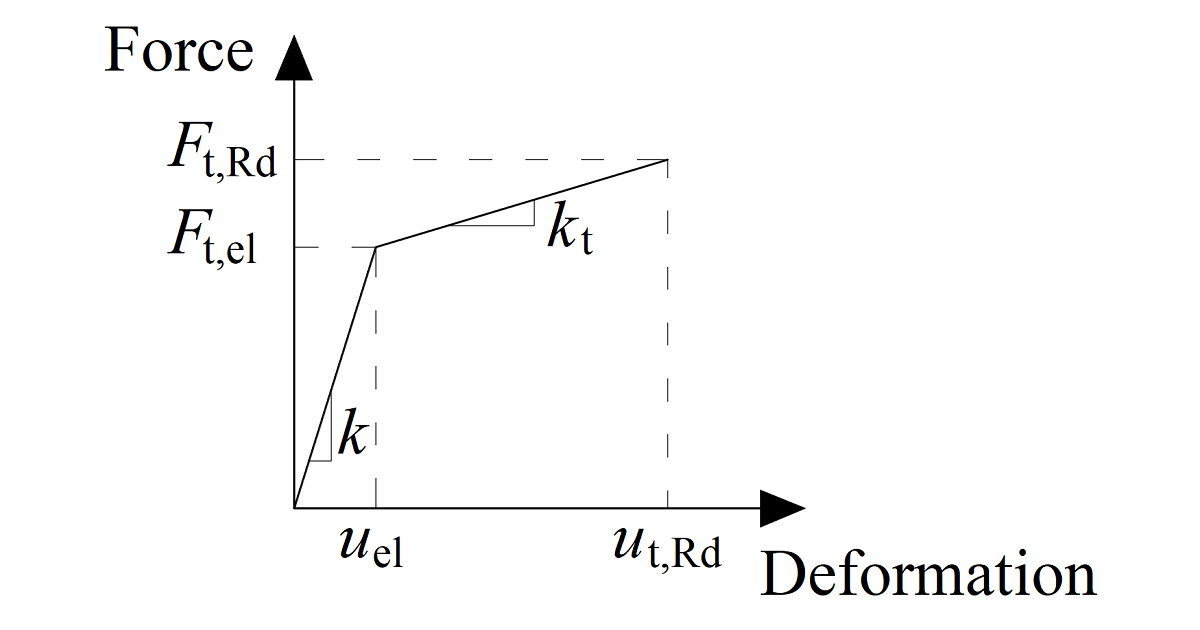
플레이트 지압에 대한 힘-변형 선도
힘-변형 선도는 다음 방정식을 사용하여 작성됩니다:
소성 강성:
\[ k_t = c_1 k \]
탄성 한계에서의 힘:
\[ F_{t,el} = \frac{F_{t,Rd}}{c_1 c_2 - c_1 +1} \]
탄성 한계에서의 변형:
\[ u_{el} = \frac{ F_{t,el} }{k} \]
소성 한계에서의 변형:
\[ u_{t,Rd} = c_2 u_{el} \]
\[ c_1 = \frac{f_{ub} - f_{yb}}{\frac{1}{4} A E - f_{yb}} \]
\[ c_2 = \frac{AE}{4 f_{yb}} \]
여기서:
- \(F_{t,Rd}\) – 볼트 인장 설계값 저항력
- \(f_{yb}\) – 볼트 항복강도
- \(f_{ub}\) – 볼트 극한강도
- \(A\) – 파단 후 연신율
전단 볼트
볼트 구멍에서 볼트 생크로부터 플레이트로는 압축력만 전달됩니다. 이는 생크 노드와 구멍 가장자리 노드 사이의 보간 링크로 모델링됩니다. 플레이트를 모델링하는 쉘 요소의 변형 강성은 볼트 간 힘을 분배하고 플레이트의 적절한 지압을 시뮬레이션합니다.
볼트 구멍은 표준(기본값) 또는 슬롯형(플레이트 편집기에서 설정 가능)으로 간주됩니다. 표준 구멍의 볼트는 모든 방향으로 전단력을 전달할 수 있으며, 슬롯형 구멍의 볼트는 한 방향이 제외되어 해당 선택 방향으로 자유롭게 이동할 수 있습니다.
전단 볼트의 초기 강성 및 설계값 저항력은 다음 공식으로 정의됩니다:
\[k_{el}=\frac{1}{\frac{1}{k_{11}}+\frac{1}{k_{12}}}\]
\[k_{11} = \frac{8d_b^2f_{ub}}{d_{M16}}\]
\[k_{12}=12k_td_bf_{up}\]
\[k_t=\min \left ( 2.5,\, \frac{1.5t_{min}}{d_{M16}} \right ) \]
\[k_{pl}=\frac{k_{el}}{1000}\]
여기서:
- \(d_b\) – 볼트 직경
- \(f_{ub}\) – 볼트 극한강도
- \(d_{M16}=16 \textrm{ mm}\) – 기준 볼트 M16의 직경
- \(f_{up}\) – 연결 플레이트의 극한강도
- \(t_{min}\) – 연결 플레이트의 최소 두께
전단 볼트를 나타내는 스프링은 이선형 힘-변형 거동을 가집니다. 항복 개시는 다음에서 예상됩니다:
\[F_{V,el}=0.999 F_{V,Rd}\]
변형 능력은 다음과 같이 고려됩니다:
\[\delta_{pl}=\delta_{el}\]
여기서:
- \(F_{V,el}\) – 전단 볼트 탄성 저항력
- \(F_{V,Rd}\) – 전단 볼트 저항력
- \(\delta_{el}\) – 전단 볼트 탄성 변형
인장과 전단력의 상호작용
축력과 전단력의 상호작용은 해석 모델에 직접 도입할 수 있습니다. 힘의 분배는 실제 거동을 더 잘 반영합니다(첨부 선도 참조). 인장력이 큰 볼트는 전단력을 적게 받으며, 그 반대도 마찬가지입니다.
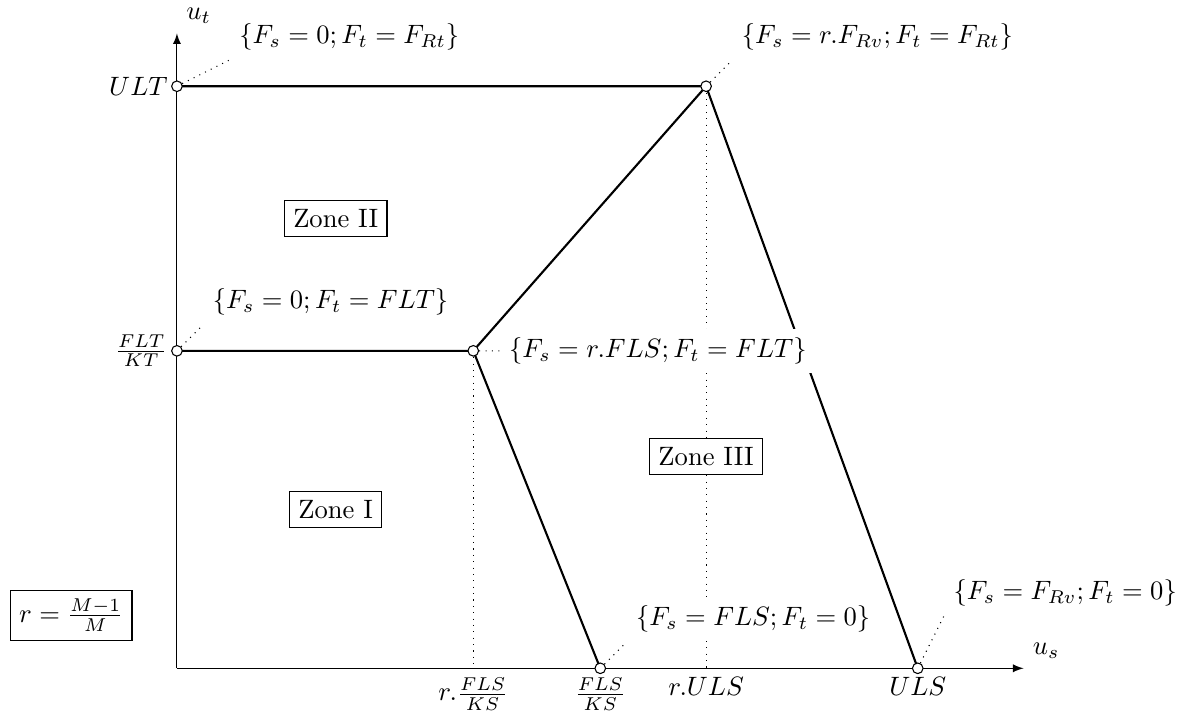
축력과 전단력의 상호작용 예시 (EC)
프리로드 볼트
프리로드 볼트는 변형을 최소화해야 하는 경우에 사용됩니다. 볼트의 인장 모델은 표준 볼트와 동일합니다. 전단력은 지압이 아닌 체결된 플레이트 간의 마찰을 통해 전달됩니다.
프리로드 볼트의 설계값 미끄럼 저항력은 작용 인장력의 영향을 받습니다.
IDEA StatiCa 연결 모듈은 프리로드 볼트의 미끄럼 전 한계 상태를 검토합니다. 미끄럼 효과가 발생하면 볼트는 규정 검토를 만족하지 못합니다. 이 경우 미끄럼 후 한계 상태를 볼트 구멍이 지압을 받고 볼트가 전단력을 받는 표준 지압 규정 검토로 확인해야 합니다.
사용자는 어떤 한계 상태를 검토할지 결정할 수 있습니다. 주요 미끄럼에 대한 저항력 또는 볼트의 전단력에 대한 미끄럼 후 상태 중 하나를 선택할 수 있습니다. 하나의 볼트에 대한 두 가지 규정 검토는 하나의 해석에서 동시에 수행되지 않습니다. 주요 미끄럼 이후 볼트는 표준 거동을 하며 표준 지압 절차로 검토할 수 있다고 가정합니다.
연결의 모멘트 하중은 전단 능력에 미치는 영향이 작습니다. 그럼에도 불구하고 각 볼트에 대한 마찰 규정 검토는 개별적으로 수행됩니다. 이 규정 검토는 볼트의 유한요소법 구성요소에 구현되어 있습니다. 각 볼트의 외부 인장 하중이 휨 모멘트에서 비롯된 것인지 연결의 인장 하중에서 비롯된 것인지에 대한 일반적인 정보는 없습니다.
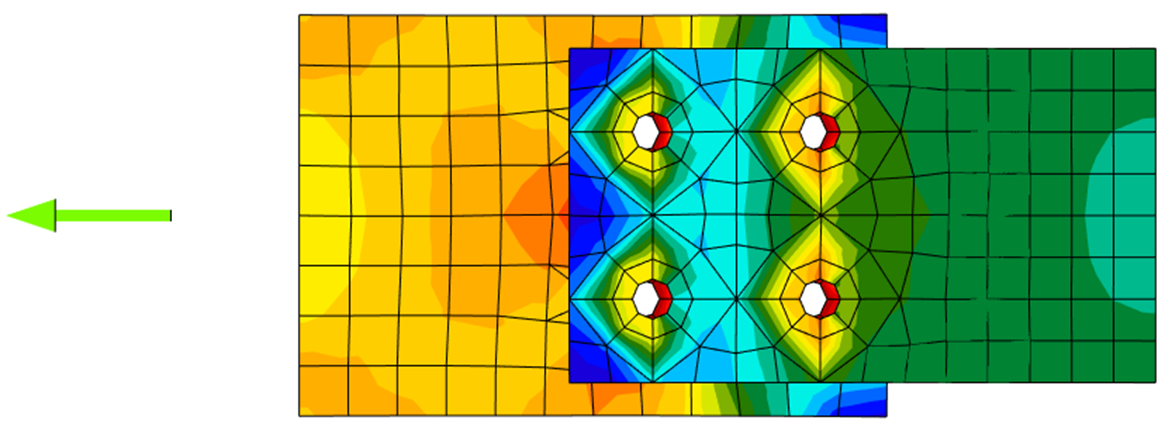
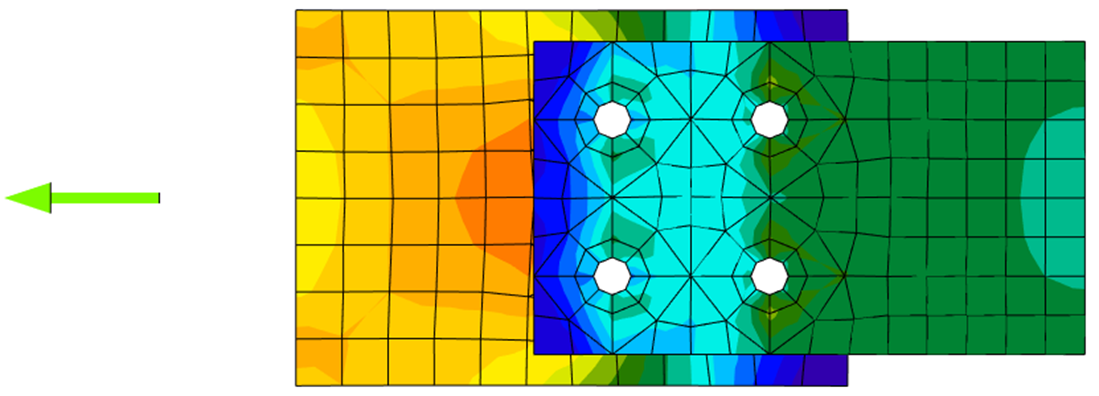
표준 전단 볼트 연결의 응력 분포
미끄럼 저항 전단 볼트 연결의 응력 분포