2.7 Méthode de résolution et algorithme de contrôle de charge
Un algorithme standard de Newton-Raphson (NR) complet est utilisé pour trouver la solution à un problème de Méthode des Éléments Finis non linéaire.
En général, l'algorithme NR ne converge pas souvent lorsque la charge totale est appliquée en une seule étape. Une approche habituelle, également utilisée ici, consiste à appliquer la charge de manière séquentielle en plusieurs incréments et à utiliser le résultat de l'incrément de charge précédent pour démarrer la résolution de Newton de l'incrément suivant. À cette fin, un algorithme de contrôle de charge a été implémenté par-dessus le Newton-Raphson. Dans le cas où les itérations NR ne convergent pas, l'incrément de charge actuel est réduit à la moitié de sa valeur, et les itérations NR sont relancées.
Un second objectif de l'algorithme de contrôle de charge est de trouver la charge critique, qui correspond à certains « critères d'arrêt » – plus précisément la déformation maximale dans le béton, le glissement maximal dans les éléments d'adhérence, le déplacement maximal dans les éléments d'ancrage, et la déformation maximale dans les barres de ferraillage. La charge critique est trouvée par la méthode de bissection. Dans le cas où le critère d'arrêt est dépassé en un point quelconque du modèle, les résultats du dernier incrément de charge sont rejetés, et un nouvel incrément de la moitié de la taille du précédent est calculé. Ce processus est répété jusqu'à ce que la charge critique soit trouvée avec une certaine tolérance d'erreur.
Pour le béton, le critère d'arrêt a été fixé à une déformation de 5 % en compression (c'est-à-dire environ un ordre de grandeur supérieur à la déformation de rupture réelle du béton) et de 7 % en traction aux points d'intégration des éléments de coque. En traction, la valeur a été fixée pour permettre d'atteindre en premier la déformation limite dans le ferraillage, qui est généralement d'environ 5 % sans tenir compte du raidissement en traction. En compression, la valeur a été choisie parmi plusieurs alternatives comme étant suffisamment grande pour que les effets de l'écrasement soient visibles dans les résultats, mais suffisamment petite pour ne pas causer trop de problèmes de stabilité numérique.
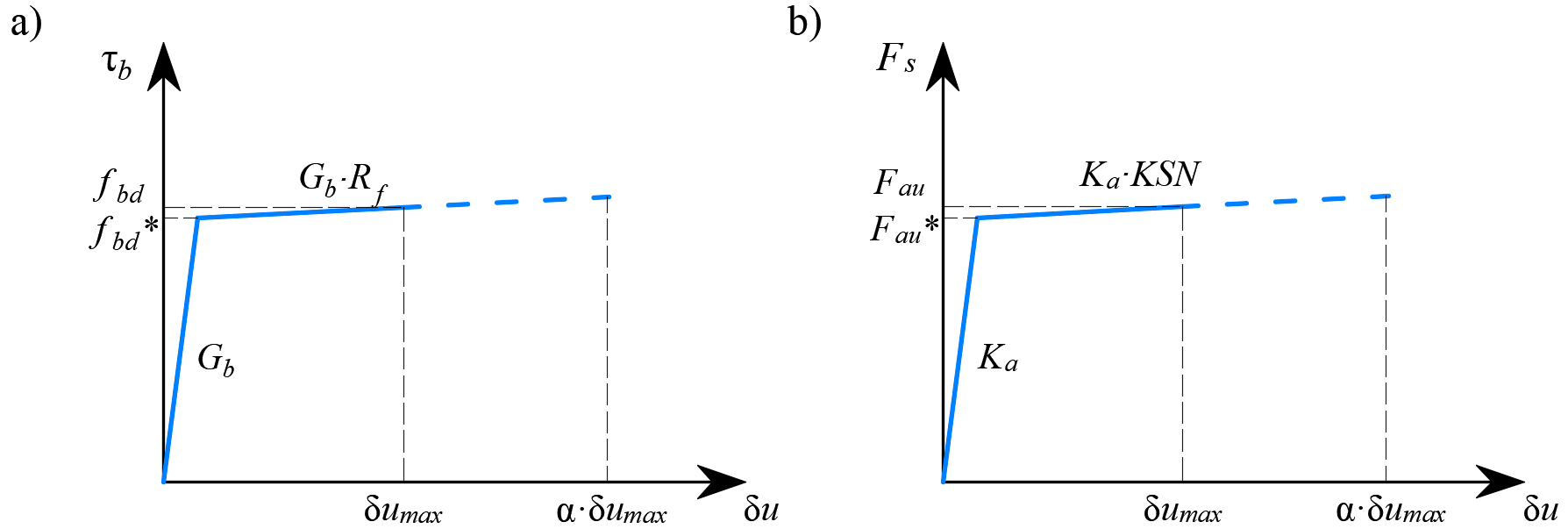
\[ \textsf{\textit{\footnotesize{Fig. 17\qquad Constitutive relationship of bond and anchorage elements used for anchorage length verification:}}}\]
\[ \textsf{\textit{\footnotesize{(a) bond shear stress slip response of a bond element; (b) force-displacement response of an anchorage element.}}}\]
Pour le ferraillage, le critère d'arrêt est défini en termes de contraintes. Étant donné que les contraintes à la fissure sont modélisées, le critère en traction correspond à la résistance à la traction du ferraillage tenant compte du coefficient de sécurité. La même valeur est utilisée pour le critère en compression.
Le critère d'arrêt dans les éléments d'adhérence et les ressorts d'ancrage est α·δumax, où δumax est le glissement maximal utilisé dans les vérifications normatives et α = 10.