IDEA StatiCa RCS – Calcul structurel des éléments en béton 1D
Calcul des sections en béton armé selon EN 1992-1-1 et EN 1992-2.
Flexion
Cisaillement
Torsion
Interaction
Vérification de la limitation des contraintes
Contrôle de la fissuration
Diagramme N-M-κ
Littérature
Flexion
Méthodes de vérification de la capacité en section
Deux méthodes bien connues peuvent être utilisées pour vérifier l'état limite ultime des éléments en béton 1D. La première fournit la résistance ultime de la section transversale sous la forme d'un domaine d'interaction ou d'un diagramme d'interaction (dans le cas d'un moment fléchissant dans une seule direction). La capacité de la section transversale peut être déterminée comme le rapport des efforts intérieurs agissants aux efforts à l'état limite. La seconde consiste à trouver l'équilibre dans une section transversale, où l'on recherche le comportement réel de la section chargée, l'utilisation des matériaux en termes de contraintes, et une vision des vulnérabilités de la section.
Hypothèses générales de conception et hypothèses de calcul pour l'État Limite Ultime
- La déformation ε dans le ferraillage et le béton est supposée directement proportionnelle à la distance à l'axe neutre (les sections planes restent planes).
- L'interaction du ferraillage et du béton est assurée par l'adhérence entre le béton et le ferraillage sans glissement (la déformation ε du ferraillage est identique à celle des fibres de béton adjacentes).
- La résistance à la traction du béton est négligée (toutes les contraintes de traction sont transmises par le ferraillage).
- Les contraintes de compression du béton dans la zone comprimée sont calculées en fonction de la déformation issue des diagrammes contrainte-déformation.
- Les contraintes dans le ferraillage sont calculées en fonction de la déformation issue des diagrammes contrainte-déformation.
- La déformation ultime du béton comprimé est limitée par εcu2 (diagramme parabole-rectangle pour le béton sous compression) et εcu3 (relation contrainte-déformation bilinéaire), [2].
- La déformation de compression du ferraillage est sans limitation dans le cas d'une branche plastique supérieure horizontale ; dans le cas d'une branche plastique supérieure inclinée, la déformation est limitée à εud,[2].
- Un état limite est atteint lorsque l'état d'au moins un des matériaux dépasse la déformation ultime à l'état limite (si εu n'est pas limité, le béton comprimé est déterminant).
\[ \textsf{\textit{\footnotesize{\qquad Strain stress.}}}\]
\[ \textsf{\textit{\footnotesize{\qquad Stress-strain design diagram for reinforcing steel with inclined top branch.}}}\]
Diagramme d'interaction
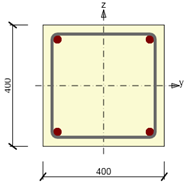
La première option consiste à vérifier la section transversale par une surface d'interaction (ou diagramme d'interaction). Une explication est fournie sur un exemple de surfaces d'interaction pour une section carrée armée tirée de l'exemple présenté dans la figure ci-dessous. Sur la surface d'interaction sont localisés les points définissant l'état limite ultime de la section transversale étudiée. La surface d'interaction est tracée à partir des points (N, My, Mz), qui sont déterminés par intégration des contraintes dans la section transversale, ayant atteint la déformation ultime dans l'un des matériaux. Pour une interaction 3D, la surface peut être dérivée d'un diagramme d'interaction 2D, qui est une courbe fermée correspondant à l'état de contrainte d'un axe neutre en rotation continue.
\[ \textsf{\textit{\footnotesize{\qquad Symmetrical reinforced cross-section.}}}\]
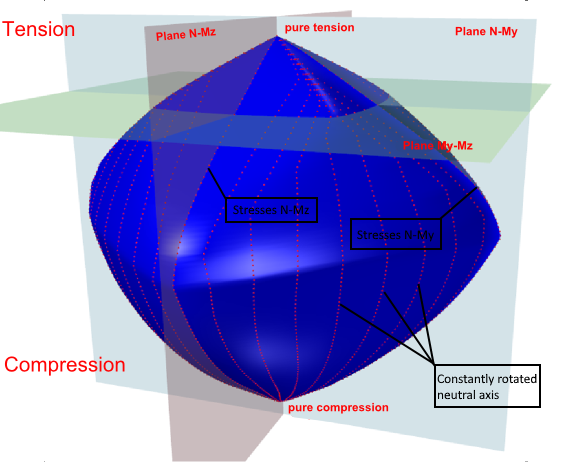
\[ \textsf{\textit{\footnotesize{\qquad Interaction surface shows failure conditions for all load cases of normal force and bending moments.}}}\]
Dans le cas d'une section transversale symétrique par rapport à l'axe y, le diagramme d'interaction est symétrique par rapport au plan N-My. De même, dans le cas d'une section transversale symétrique par rapport à l'axe z, le diagramme d'interaction est symétrique par rapport au plan N-Mz. La section avec ferraillage unilatéral introduit une forme aplatie du diagramme d'interaction.
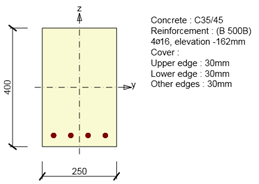
\[ \textsf{\textit{\footnotesize{\qquad Single symmetrical reinforced cross-section.}}}\]
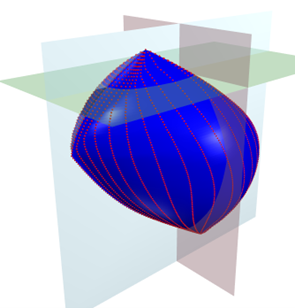
\[ \textsf{\textit{\footnotesize{\qquad Interaction surface for cross-section with single symmetric reinforcement.}}}\]
Les points définissant l'état limite ultime sont obtenus par intégration des contraintes. La figure ci-dessous présente les déformations à l'état limite ultime.
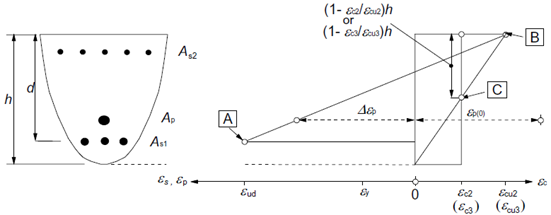
Distributions des déformations à l'état limite ultime (tirées de [2]).
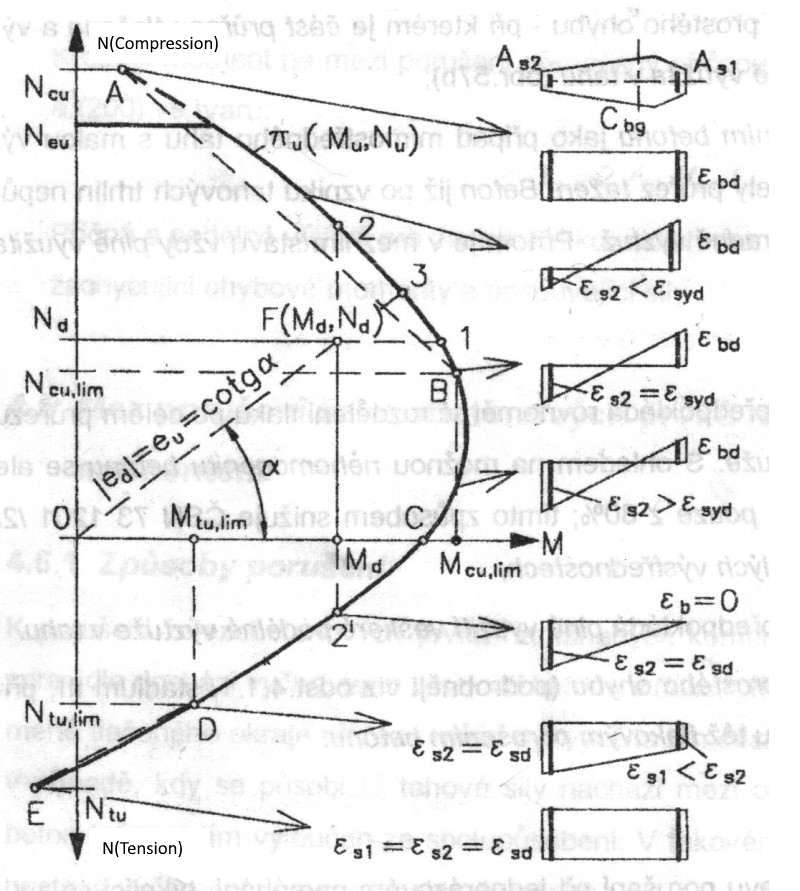
Le diagramme d'interaction montre la rupture de la section transversale sous effort normal et moments fléchissants. [1]
En considérant le problème du diagramme 2D (courbe fermée se situant sur la surface d'interaction), on peut déterminer que le plan de déformation passe par l'axe neutre et le point critique [y, z, ε], considéré comme point critique R. Le point [y, z] définit un point dans la section transversale avec la valeur de déformation ε à l'état limite ultime. L'inclinaison de l'axe neutre est constante pour tous les points du diagramme 2D.
Dans le cas où la contrainte de compression dans le béton est déterminante pour le calcul, le point R correspond à la fibre de béton comprimée la plus éloignée ou au point limite C. Cependant, ceci ne peut s'appliquer que si la section est constituée d'un seul type de béton - et non d'une section transversale mixte.
Dans le cas où la contrainte de traction dans le ferraillage est déterminante pour le calcul (la déformation εud est dépassée à l'état limite ultime pour une ou plusieurs barres), la condition suivante doit être satisfaite : pour le plan de déformation donné, la valeur εud ne doit être dépassée pour aucune autre barre.
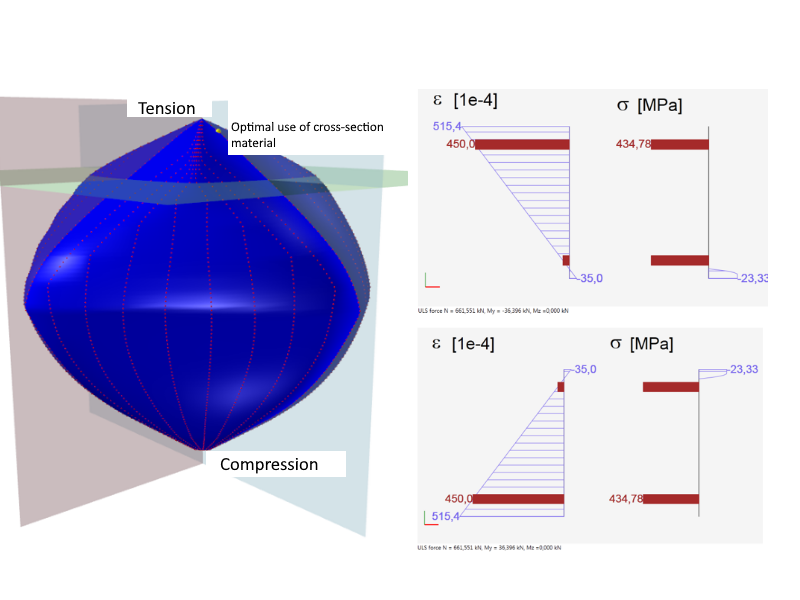
\[ \textsf{\textit{\footnotesize{\qquad Optimal use of cross-section material.}}}\]
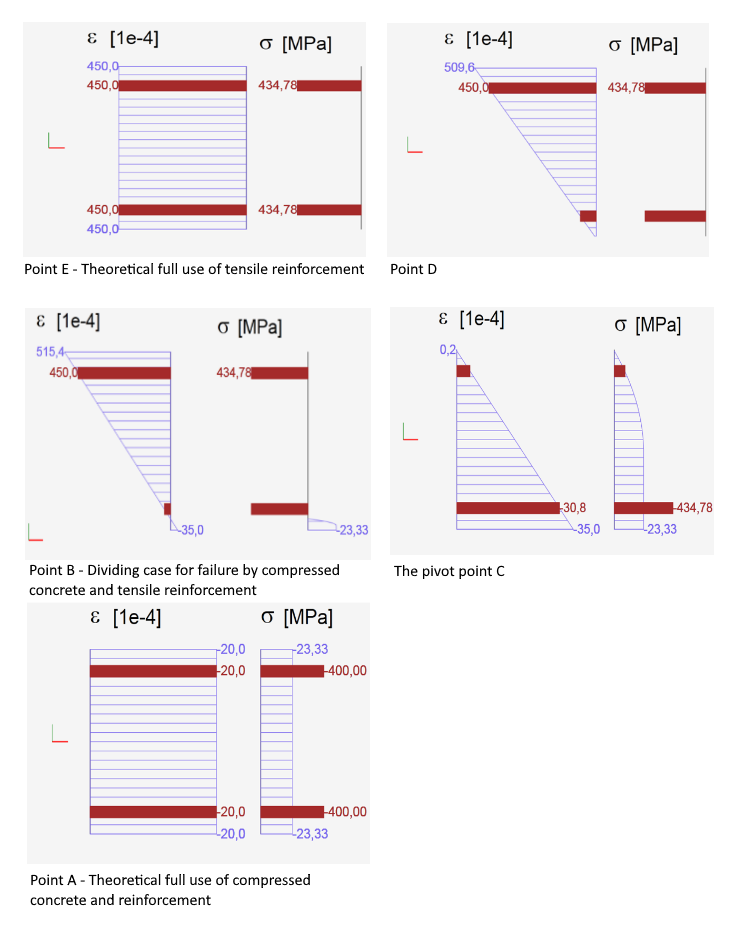
\[ \textsf{\textit{\footnotesize{\qquad Characteristic strain plane positions calculated for purpose of interaction diagram.}}}\]
La figure ci-dessus montre que le diagramme peut être divisé en deux parties : la partie où la rupture est causée par un effort de traction et la partie qui rompt sous un effort de compression. Les points limites correspondent au cas décrit ci-dessus, où l'inclinaison extrême du plan de déformation est également visible. Lors du tracé d'un diagramme d'interaction, l'inclinaison du plan de déformation de la section transversale varie dans cet intervalle, tandis que l'on recherche le point R (voir ci-dessus). Sur la base du plan ainsi défini, on effectue l'intégration pour obtenir les contraintes à l'état limite ultime.
Vérification d'une section transversale soumise à un effort axial et un moment fléchissant
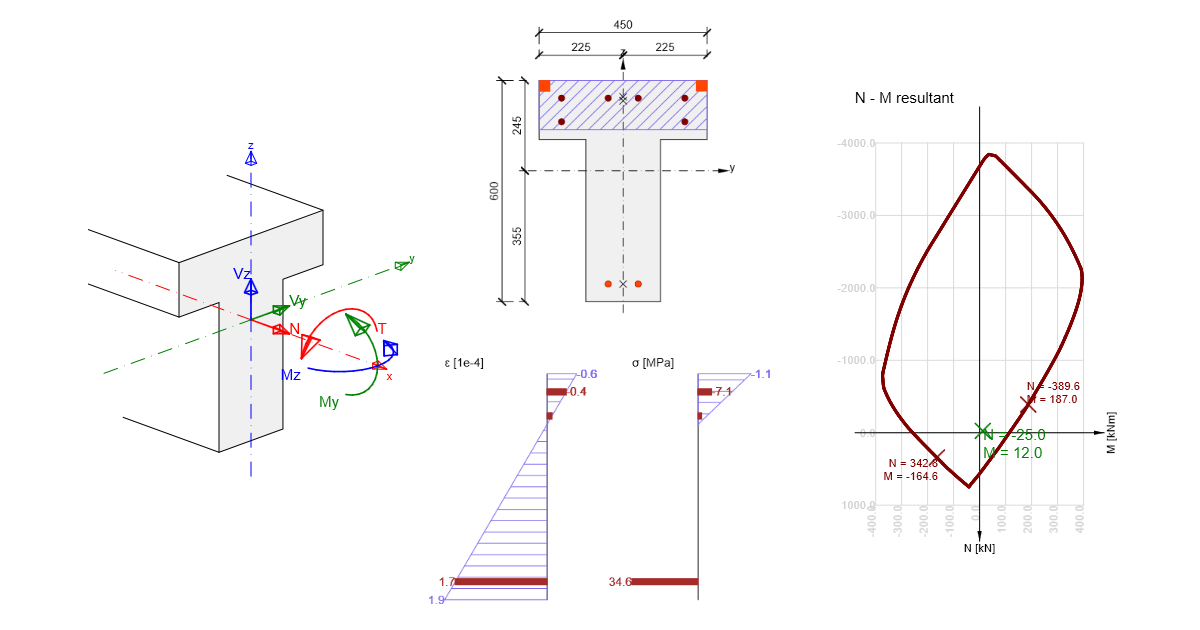
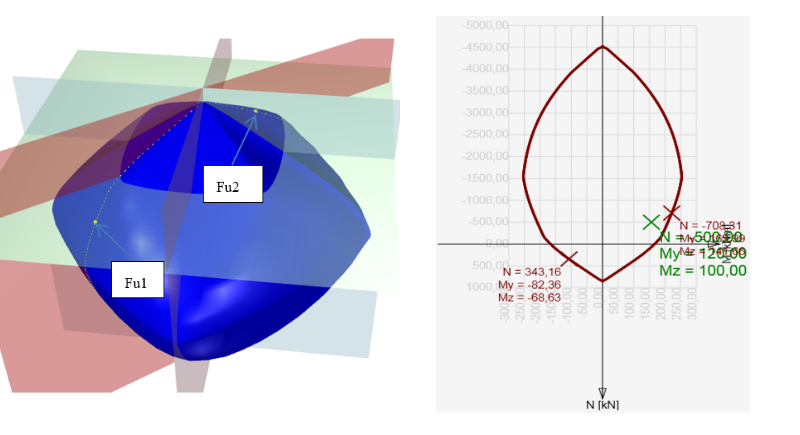
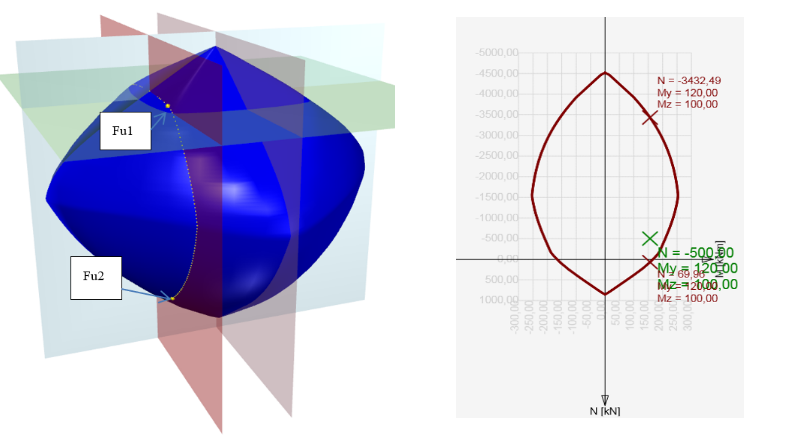
La vérification d'une section transversale soumise à un effort axial et un moment fléchissant consiste à démontrer que les contraintes vérifiées (combinaison Nd, Myd, Mzd) se situent à l'intérieur ou sur la surface du domaine d'interaction. Différentes méthodes permettent d'effectuer cette vérification. L'exemple suivant illustre la vérification d'une section transversale rectangulaire soumise à des efforts Nd = -500 kN, Myd = 120 kNm, Mzd = 100 kNm.
Méthode NuMuMu
Pour définir la résistance d'une section transversale, on suppose des variations proportionnelles de toutes les composantes des efforts intérieurs (l'excentricité de l'effort normal reste constante) jusqu'à ce que la surface d'interaction soit atteinte. La variation des efforts intérieurs concernés peut être interprétée comme un déplacement le long d'une droite reliant l'origine du système de coordonnées (0,0,0) et le point défini par les efforts intérieurs (NEd, MEd,y, MEd,z). Les deux intersections de cette droite avec la surface d'interaction, qui peuvent être trouvées, représentent deux ensembles d'efforts à l'état limite ultime. À chaque intersection, le programme détermine trois efforts à l'état limite : la résistance de calcul à l'effort axial NRd et les moments résistants de calcul correspondants MRdy, MRdz.
Méthode NuMM
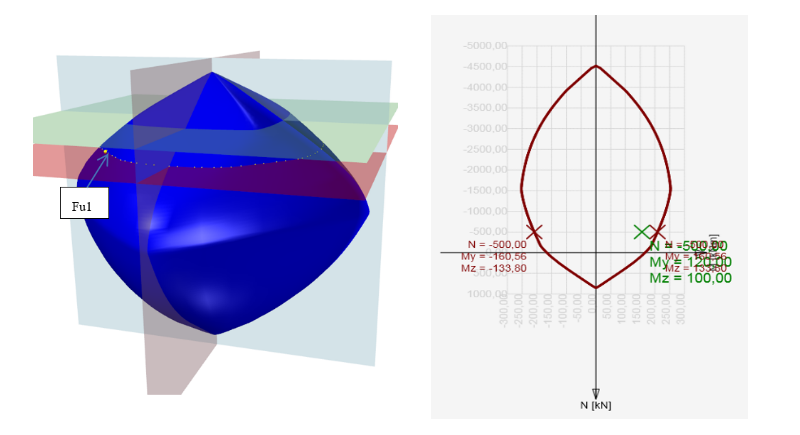
Pour définir la résistance de la section transversale, on suppose un effort normal constant (égal à l'effort normal de calcul agissant) et des variations proportionnelles des moments fléchissants jusqu'à ce que la surface d'interaction soit atteinte. La variation des efforts intérieurs concernés peut être interprétée comme un déplacement dans un plan horizontal le long de la droite reliant le point (NEd,0,0) et le point défini par les efforts intérieurs agissants (NEd, MEd,y, MEd,z). Les deux intersections de cette droite avec la surface d'interaction, qui peuvent être trouvées, représentent deux ensembles d'efforts à l'état limite ultime. À chaque intersection, le programme détermine trois efforts à l'état limite : les moments résistants de calcul MRdy, MRdz et l'effort normal de calcul agissant (correspondant) NEd.
Méthode NMuMu
Pour définir la résistance de la section transversale, on suppose un effort normal constant (égal à l'effort normal de calcul agissant) et des variations proportionnelles des moments fléchissants jusqu'à ce que la surface d'interaction soit atteinte. La variation des efforts intérieurs concernés peut être interprétée comme un déplacement dans un plan horizontal le long de la droite reliant le point (NEd,0,0) et le point défini par les efforts intérieurs agissants (NEd, MEd,y, MEd,z). Les deux intersections de cette droite avec la surface d'interaction, qui peuvent être trouvées, représentent deux ensembles d'efforts à l'état limite ultime. À chaque intersection, le programme détermine trois efforts à l'état limite : les moments résistants de calcul MRdy, MRdz, et l'effort normal de calcul agissant (correspondant) NEd.
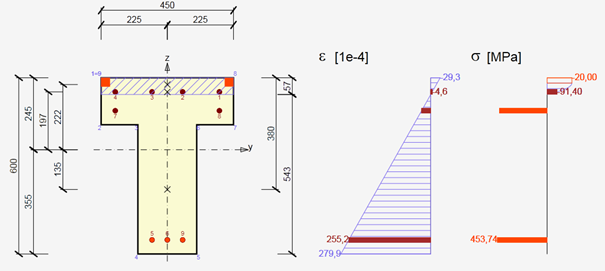
Détermination de la réponse de la section
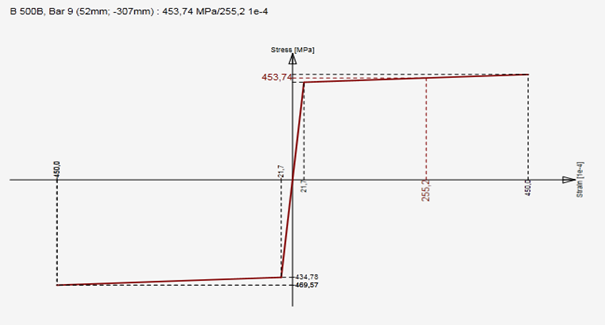
Une autre possibilité de vérifier la section transversale consiste à déterminer la réponse de la section transversale (c'est-à-dire la distribution des déformations et des contraintes sous les efforts intérieurs agissants). Cette méthode est également connue sous le nom de méthode de la déformation limite. Le niveau des contraintes agissantes dans chaque fibre (dans le cas d'une flexion plane, dans chaque couche) et dans chaque barre de ferraillage est calculé en fonction de la déformation issue du diagramme contrainte-déformation du matériau.
La détermination de la réponse de la section transversale est calculée à l'aide de la méthode numérique spécifiée dans [6]. Le principe consiste en l'incrément progressif du chargement de la section par les composantes déséquilibrées des efforts non transmis. Ceux-ci sont obtenus par intégration des contraintes sur la section à l'aide des diagrammes contrainte-déformation. Si la valeur de contrainte peut être trouvée pour la déformation dans le diagramme contrainte-déformation, voir la figure ci-dessous (a), la contrainte calculée est correcte en supposant un matériau élastique linéaire. Dans les cas (b) et (c), la contrainte pour un calcul linéaire atteint des valeurs irréalistes, et une partie (b) ou la totalité de la valeur (c) ne peut pas être transmise par le matériau. En intégrant les contraintes non transmises, on obtient les efforts intérieurs non transmis, dont les résultantes doivent être ajoutées aux efforts intérieurs des charges variables.
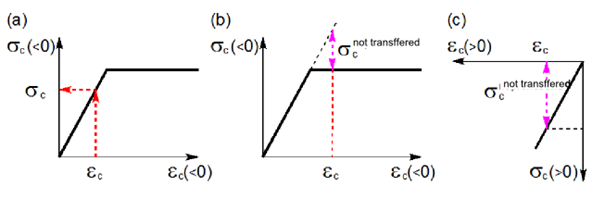
Contraintes non transmises dans les diagrammes contrainte-déformation. [4]
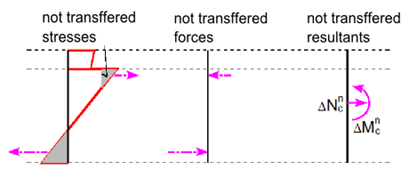
Efforts intérieurs non transmis. [4]
Cette méthode de calcul nécessite l'utilisation de méthodes numériques pour intégrer les contraintes sur la surface de la section transversale et pour l'analyse non linéaire des équations d'équilibre dans la section. L'itération est arrêtée lorsque les critères de convergence sont satisfaits.
\[\frac{{{F_e} - {F_i}}}{{{F_e}}} \le max\left\{ {e,d} \right\}\]
où
Fe est le chargement de la section,
Fi est la réponse de la section (efforts intérieurs calculés sur la base du plan de déformation).
Si a est la valeur approchée (approximée) et b est la valeur exacte (vraie), alors l'écart absolu est donné par l'équation suivante.
\[e = \left| {b - a} \right|\]
L'écart relatif est donné par la formule suivante :
\[d = \left| {\frac{{b - a}}{b}} \right|\]
Dans la plupart des programmes, il est possible de définir ces critères de convergence (les valeurs par défaut sont 1% pour l'erreur relative, 100 N, 100 Nm pour l'erreur absolue de l'effort normal et des moments).
Ainsi, si les données d'entrée sont N = 0 kN, My = 100 kNm, Mz = 0 kNm et que les efforts intégrés après itération sont N = - 0,07 kN, My = 100,5 kNm, Mz = 0,02 kNm, l'évaluation sera la suivante. En tenant compte du fait que N et Mz sont égaux à 0, une comparaison avec l'écart absolu peut être effectuée :
La valeur de l'effort normal 100N> | 70 | N
La valeur du moment fléchissant Mz 100Nm> | 20 | Nm
La valeur du moment fléchissant My
\[d = \left| {\frac{{b - a}}{b}} \right| = \frac{{100 - 100,5}}{{100}} = 0,005\; < 0,01\]
Vérification de la section transversale par la réponse
Dans le cas de la recherche d'un équilibre dans la section transversale, le plan de déformation est connu. À partir du plan de déformation, il est possible de calculer la déformation en tout point de la section, puis les contraintes ou les efforts intérieurs dans les barres de ferraillage, la section transversale ou ses parties, à l'aide des diagrammes contrainte-déformation des matériaux. Les valeurs de contraintes et de déformations calculées sont comparées aux valeurs de déformation limite issues des diagrammes contrainte-déformation des matériaux utilisés.
L'avantage de cette méthode est que l'on obtient une image complète des valeurs de contraintes et de déformations dans la section sous les efforts intérieurs agissant sur la section transversale.
Cisaillement
En ce qui concerne la rupture fragile, la vérification du cisaillement est l'une des vérifications importantes d'une section en béton armé.
Procédure de calcul
Le calcul de la résistance au cisaillement est composé de plusieurs parties fondamentales. Dans un premier temps, il convient d'analyser si des fissures dues à la flexion se produisent ou non à l'emplacement vérifié. Le cas échéant, utiliser le calcul conformément à EN 1992-1-1 [2], Article 6.2.2 (1). Dans le cas contraire, on détermine s'il s'agit de béton non armé ou de béton faiblement ferraillé, puis on procède conformément à EN 1992-1-1 Article 12.6.3.
Pour le béton armé non fissuré (sans ferraillage de cisaillement), on vérifie conformément à EN 1992-1-1 Article 6.2.2 (2). Pour les éléments nécessitant un ferraillage de cisaillement, on vérifie conformément à l'Article 6.2.3 [2].
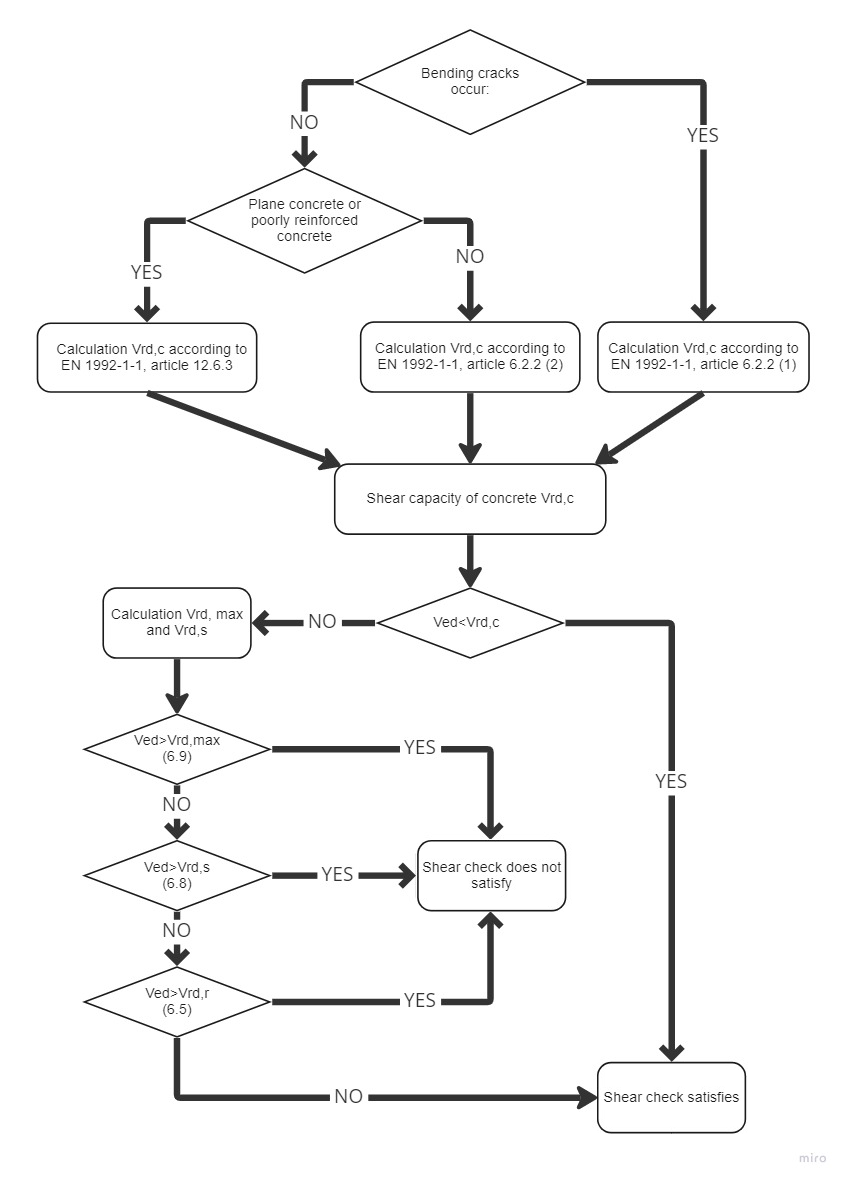
\[ \textsf{\textit{\footnotesize{\qquad Process diagram for shear check.}}}\]
Résistance au cisaillement des éléments sans ferraillage de cisaillement
Résistance au cisaillement des éléments en zones fissurées en flexion (art. 6.2.2 (1) [2])
La résistance au cisaillement des éléments en béton armé sans ferraillage de cisaillement soumis à un moment fléchissant est donnée par :
\[{{V}_{Rd,cm}}=~{{C}_{Rd.c}}k~{{\left( 100~{{\varrho }_{l}}{{f}_{ck}} \right)}^{{}^{1}/{}_{3}}}~{{b}_{w}}d\]
Cette expression a été définie sur la base d'essais réalisés sur un nombre représentatif de poutres simples en cas de rupture par effort tranchant. Étant donné que la résistance ci-dessus peut être nulle pour les éléments sans ferraillage longitudinal (rl), des équations ont été dérivées pour les éléments faiblement ferraillés. Étant donné que la résistance ci-dessus peut être nulle pour les éléments sans ferraillage longitudinal (rl), pour les éléments faiblement ferraillés, elle est déterminée par l'équation
\[{{V}_{Rd,c}}\ge ~{{\upsilon }_{min}}{{b}_{w}}d\]
Pour la résistance au cisaillement avec influence de l'effort normal, elle est déterminée par l'équation
\[{{V}_{Rd,cn}}=~{{k}_{1}}{{\sigma }_{cp}}~{{b}_{w}}d\]
La résistance au cisaillement dans son expression complète, correspondant à EN 1992-1-1 art. 6.2.2 (1)
\[{{V}_{Rd,c}}=~\left[ {{C}_{Rd.c}}k~{{\left( 100~{{\varrho }_{l}}{{f}_{ck}} \right)}^{{}^{1}/{}_{3}}}+{{k}_{1}}{{\sigma }_{cp}} \right]~{{b}_{w}}d\]
Avec un minimum de
\[{{V}_{Rd,c}}=~\left( {{\upsilon }_{min}}+{{k}_{1}}{{\sigma }_{cp}} \right){{b}_{w}}d\]
où
CRd,c = 0,18 / γc,
k facteur de hauteur de la section transversale
\[k=1+\sqrt{\frac{200}{d}}<2,0\]
ρ1 taux de ferraillage longitudinal
\[{{\varrho }_{l}}=\frac{{{A}_{sl}}}{{{b}_{w}}d}\le 0,02\]
fck résistance caractéristique à la compression sur cylindre du béton à 28 jours
k1 = 0,15
σcp = NEd / Ac < 0,2 fcd en MPa
bw plus petite largeur de la section transversale dans la zone tendue
d hauteur utile de la section transversale
υmin résistance minimale équivalente au cisaillement υmin = 0.035 k3/2 fck1/2
Résistance au cisaillement des éléments en zones non fissurées en flexion (art. 6.2.2 (2) [2])
La résistance au cisaillement des éléments en zones non fissurées en flexion peut être déterminée à partir du cercle de Mohr. Dans l'équation
\[{{\sigma }_{1,2}}=\frac{{{\sigma }_{x}}+{{\sigma }_{y}}}{2}\pm \sqrt{{{\left( \frac{{{\sigma }_{x}}-{{\sigma }_{y}}}{2} \right)}^{2}}+\tau _{z}^{2}}\]
On substitue σx = σcp et τz = VRd,c S / (I bw) et on détermine VRd,c, ce qui donne l'équation correspondant à la formule de EN 1992-1-1 art. 6.2.2 (2)
où
I est le moment quadratique de la section,
bw est la largeur de la section transversale à l'axe centroïdal
S est le moment statique de la section au-dessus et par rapport à l'axe centroïdal,
fctd résistance de calcul à la traction axiale du béton en MPa,
scp est la contrainte de compression du béton à l'axe centroïdal due aux charges et/ou à la précontrainte,
al facteur de longueur de transmission, généralement 1,0.
En relation avec ce qui précède, il convient de noter que dans les zones sans fissures de flexion, la résistance VRd ,c peut être significativement plus élevée que dans les zones fissurées conformément à l'Article 6.2.2 (1) [2]. La figure ci-dessous montre clairement que, bien que l'effort tranchant soit vérifié à son extremum (qui ne produit pas de fissures), cela ne garantit pas nécessairement qu'il sera repris sur toute la longueur de la poutre. Cela est dû à un changement de méthode de calcul de la résistance au cisaillement du béton. Par sécurité, la résistance au cisaillement peut bien entendu être considérée conformément à l'Article 6.2.2 (1) [2] également dans les zones où des fissures ne se produiront pas.
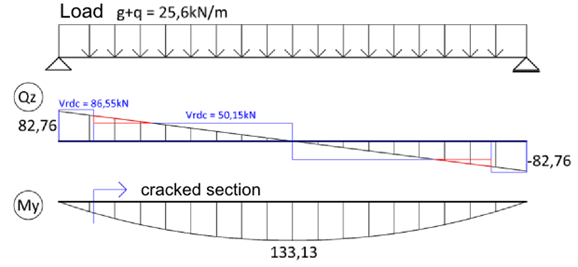
\[ \textsf{\textit{\footnotesize{\qquad Shear resistance comparison before and after the cracks occurred.}}}\]
Concernant l'expression de VRd, c conformément à l'Article 6.2.2 (2)[2], il convient également de noter que dans le cas général, la vérification doit être basée sur la fibre de contrainte principale de traction extrême du béton dans la zone de contrainte normale de compression, et non au centre de gravité de la section. À ce point, il est nécessaire de calculer les caractéristiques de la section transversale (S et bW). Pour déterminer la contrainte principale maximale s1 dans le programme IDEA RCS, on trace une ligne passant par le centre de gravité dans la direction de la résultante des efforts tranchants. Cette ligne est divisée en 20 secteurs. Sur cette ligne, on présente davantage de points caractéristiques (points du polygone de la section transversale, centre de gravité, axe neutre). Entre ces points, on calcule S, bw, σx, τyz et σ1. Au point de contrainte principale de traction maximale, on calcule la résistance au cisaillement.
L'effort tranchant avant application du facteur de réduction b requis par l'Article 6.2.2 (6) doit satisfaire la condition supplémentaire
\[ {{V}_{Ed}}\le 0,5~{{b}_{w}}d~\upsilon ~{{f}_{cd}}\]
où
\[ {{ υ}}\le 0,6\left[ 1-\frac{{{f}_{ck}}}{250} \right]\] où fck est en MPa
Résistance au cisaillement des éléments sans ferraillage ou faiblement ferraillés (art. 12.6.3 [2])
La résistance au cisaillement pour le béton non armé ou faiblement ferraillé peut être déterminée à partir de l'expression
\[ {{\tau }_{cp}}\le k~{{V}_{Ed~}}/{{A}_{cc}}\]
Où
τcp est substitué par
\[ {{f}_{cvd}}=\sqrt{f_{ctd,pl}^{2}+{{\sigma }_{cp}}{{f}_{ctd,pl}}}~pro~{{\sigma }_{cp}}\le {{\sigma }_{c,lim}}~\]
ou
\[ {{f}_{cvd}}=\sqrt{f_{ctd,pl}^{2}+{{\sigma }_{cp}}{{f}_{ctd,pl}}-{{\left( \frac{{{\sigma }_{cp}}-{{\sigma }_{c,lim}}}{2} \right)}^{2}}}~pro~{{\sigma }_{cp}}>{{\sigma }_{c,lim}}~\]
Les valeurs partielles utilisées dans la formule ci-dessus sont données par :
\[ {{\sigma }_{c,lim}}={{f}_{cd,pl}}-2\sqrt{{{f}_{ctd,pl}}\left( {{f}_{ctd,pl}}+{{f}_{cd,pl}} \right)}\]
où
fcd,pl Résistance de calcul à la compression pour le béton non armé ou faiblement ferraillé,
fctd,pl Résistance de calcul à la traction axiale du béton non armé ou faiblement ferraillé,
fcvd Résistance de calcul au cisaillement sous compression du béton.
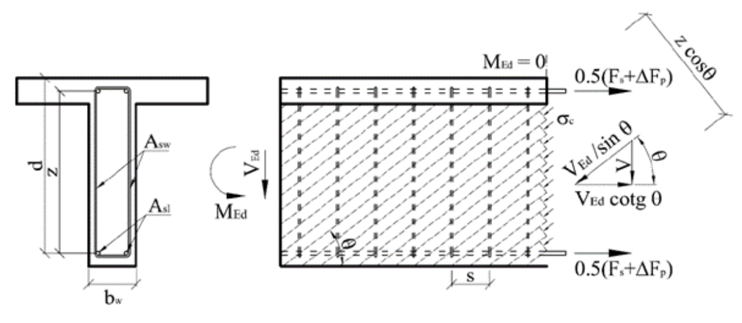
Résistance des éléments avec ferraillage de cisaillement (art. 6.2.3 [2])
Le calcul de la résistance des éléments en béton armé avec ferraillage de cisaillement est basé sur la méthode de l'analogie du treillis à diagonales d'angle variable. Le principe de cette méthode repose sur l'équilibre des forces dans le triangle déterminé par la force de la bielle (diagonale), la force du ferraillage de cisaillement (étrier) et la force du ferraillage longitudinal.
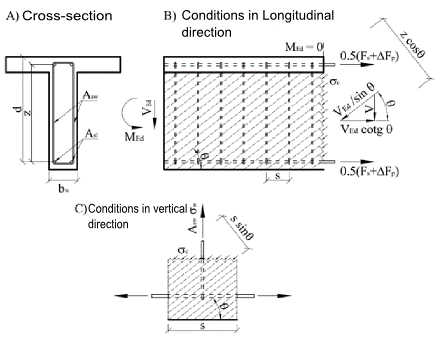
\[ \textsf{\textit{\footnotesize{\qquad Principe of Truss analogy for member under shear load.}}}\]
La section transversale soumise à un effort tranchant est traversée par des fissures à un angle θ ; pour cette raison, la bielle comprimée en béton, de même angle que les efforts tranchants, résiste à l'effort tranchant. L'effort de compression de la diagonale peut être exprimé comme Ved/sinθ. Cet effort doit être transmis par la surface de béton perpendiculaire à la diagonale comprimée bwzcosθ. La contrainte de compression du béton dans la diagonale comprimée est alors égale à :
\[ {{\sigma }_{c}}=\frac{{{V}_{Ed}}}{{{b}_{w}}z~\sin \text{ }\!\!\theta\!\!\text{ }\cos \theta }=\frac{{{V}_{Ed}}}{{{b}_{w}}z}\left( \tan \theta +\cot \theta \right)\]
En substituant \[{{\sigma }_{c}}={{\alpha }_{cw}}{{\nu }_{1}}{{f}_{cd}}\] et \[{{V}_{Ed}}={{V}_{Rd,max}}\] et en exprimant \[{{V}_{Rd,max}}\] on obtient l'équation de la résistance au cisaillement de la diagonale :
\[ {{V}_{Rd,max}}=~{{\alpha }_{cw}}~{{b}_{w}}~z~{{\nu }_{1~}}{{f}_{cd}}/\left( \cot \theta +\tan \theta \right)\]
Pour équilibrer la composante verticale de la force dans la diagonale comprimée, le ferraillage de cisaillement est utilisé. La valeur de la force verticale est basée sur la contrainte de compression de la diagonale dans la zone de béton correspondant à un seul étrier - \[{{\sigma }_{c}}{{b}_{w}}s{{\sin }^{2}}\theta\]. La force limite de l'étrier est donnée par \[{{A}_{sw}}{{f}_{ywd}}/s\].
En insérant σc, en comparant avec la force limite dans le ferraillage, après modifications on obtient :
\[ \frac{{{A}_{sw}}{{f}_{ywd}}}{s}=\frac{{{V}_{Ed}}}{z}\tan \theta\]
En exprimant ensuite Ved comme VRDs on obtient la résistance de la section transversale avec ferraillage de cisaillement vertical :
\[ {{V}_{Rd,s}}=~\frac{{{A}_{sw}}}{s}z~{{f}_{ywd}}\cot \theta\]
L'effort tranchant longitudinal est repris par le ferraillage longitudinal et peut être déterminé comme Vedcotgθ. La dérivation des formules ci-dessus peut être trouvée dans [4].
En utilisant le programme IDEA RCS, il est possible de vérifier uniquement les éléments avec ferraillage de cisaillement vertical. En général, les équations suivantes peuvent être utilisées :
\[{{V}_{Rd,s}}=~\frac{{{A}_{sw}}}{s}z~{{f}_{ywd}}\left( \cot \theta +\cot \alpha \right)\sin \alpha\]
\[{{V}_{Rd,max}}=~{{\alpha }_{cw}}~{{b}_{w}}~z~{{\nu }_{1~}}{{f}_{cd}}\left( \cot \theta +\cot \alpha \right)/\left( 1+{{\cot }^{2}}\theta \right)\]
Où
Asw est la section transversale du ferraillage de cisaillement,
s est l'espacement des étriers,
fywd est la résistance de calcul à la limite d'élasticité du ferraillage de cisaillement,
bw est la largeur minimale entre les membrures tendue et comprimée. Pour calculer la résistance VRd,max , la valeur de la largeur de la section doit être réduite à la largeur nominale de la section transversale dans le cas où la section transversale est affaiblie par des gaines de câbles
bw,nom=bw-0,5ΣΦ pour les gaines métalliques injectées
bw,nom=bw-1,2ΣΦ pour les gaines métalliques non injectées
υ = 0,6 pour fck ≤ 60MPa ou pour fck > 60MPa,
αcw est un coefficient tenant compte de l'état de contrainte dans la membrure comprimée.
| Charge | σcp = 0 | 0 < σcp≤0,25 fcd | 0,25 fcd < σcp≤0,5 fcd | 0,5 fcd < σcp≤1,0 fcd |
| Coefficient acw | 1,0 | 1+σcp/fcd | 1,25 | 2,5(1 - σcp/fcd) |
Tab. 1‑1 Détermination du coefficient αcw
L'angle θ est l'angle entre la bielle comprimée en béton et l'axe de la poutre perpendiculaire à l'effort tranchant. Les valeurs limites de cotθ applicables dans un pays peuvent être trouvées dans son Annexe Nationale. Les limites recommandées sont données par l'expression :
\[1~\le ~\cot \theta \le 2,5\]
Le choix de la valeur de l'angle θ peut influencer la valeur des résistances. La dépendance des résistances est visible sur la Figure 1.15. La figure montre qu'avec l'augmentation de l'angle θ, la résistance VRd,max augmente, et la résistance VRd,s diminue. La résistance VRd,c est constante, car elle est basée sur la méthode de l'analogie du treillis.

\[ \textsf{\textit{\footnotesize{\qquad Dependency between shear resistance and angle q.}}}\]
Calcul des caractéristiques de la section transversale pour le cisaillement
Pour calculer le cisaillement, il est important de déterminer les variables de la section transversale influençant la résistance au cisaillement. Ces variables comprennent principalement la largeur de la section résistant au cisaillement bw, la hauteur utile d et le bras de levier z. La norme [2] donne ces valeurs qui sont directement corrélées avec la contrainte de flexion réelle. Mais le problème est de déterminer ces valeurs lorsque la direction de la résultante des moments fléchissants (ou plus précisément la direction de la résultante de la résistance de la section) est significativement différente de la direction de la résultante des efforts tranchants. Dans ce cas, la norme EC2 ne fournit aucune recommandation.
Largeur de la section transversale résistant au cisaillement bw
Le programme IDEA RCS calcule la largeur de la section transversale résistant au cisaillement dans la direction perpendiculaire à la résultante des efforts tranchants. Selon l'article de l'Eurocode, cette largeur est calculée comme suit :
- La plus petite largeur de la section entre la résultante du béton comprimé et le ferraillage tendu dans la direction perpendiculaire à la résultante des efforts tranchants pour l'article 6.2.2 (a) et 6.2.3 (1)
- La largeur de la section dans une direction perpendiculaire à la résultante des efforts tranchants au point vérifié conformément à l'article 6.2.2 (2)
Hauteur utile de la section transversale
La hauteur utile est généralement définie comme la distance entre la fibre de béton la plus comprimée et le centre de gravité du ferraillage. Étant donné qu'elle est directement liée à la flexion, la distance est donnée comme la projection perpendiculaire sur la ligne de gravité du plan de déformation.
Cette définition peut être précisée de sorte qu'au lieu du centre de gravité du ferraillage tendu, on utilise la position de la résultante des forces dans le ferraillage. Lors du développement du programme IDEA RCS, le problème suivant a été résolu : comment définir la hauteur utile de la section transversale pour laquelle le plan des charges de flexion ne correspond pas à la direction de la résultante des efforts tranchants. Par conséquent, la hauteur utile est définie comme la distance entre la fibre de béton la plus comprimée et la résultante des forces dans le ferraillage tendu (basée sur la contrainte de flexion) dans la direction de la résultante des efforts tranchants, voir Figure 1.17.
Des cas exceptionnels se produiront si nous ne sommes pas en mesure de déterminer la fibre comprimée ou la résultante dans le ferraillage tendu. Dans ce cas, nous recommandons d'utiliser la valeur 0,9 h (90% de la hauteur de la section dans la direction de la résultante des efforts tranchants). Cette valeur peut être définie par l'utilisateur dans le programme IDEA RCS via le paramétrage des variables normatives.
Bras de levier des forces intérieures
Le bras de levier des forces intérieures est défini en 6.2.3 (3) [2] comme la « distance entre les membrures tendue et comprimée ». La norme ne définit pas comment procéder lorsque le plan du moment fléchissant agissant est différent de la direction de la résultante des efforts tranchants. Par conséquent, comme pour le cas de la hauteur utile, nous définissons la distance dans la direction de la résultante des efforts tranchants. Ici également, nous pouvons rencontrer des cas d'exception similaires, par exemple, toute la section est en compression, etc. Dans ce cas, on prend la valeur 0,9 d (90% de la hauteur utile de la section). Cette valeur peut être définie par l'utilisateur dans le programme IDEA RCS via le paramétrage des variables normatives.
La dépendance entre l'inclinaison du plan de flexion et la résultante de l'effort tranchant est clairement visible sur les Figures 1.18 et 1.19. Avec l'augmentation de l'inclinaison, les valeurs de la hauteur utile, des bras de levier et des résistances associées diminuent. L'état limite est à 90°. Pour cette inclinaison, le bras de levier des forces intérieures ne peut pas être calculé, par conséquent le bras de levier est égal à zéro. Dans ce cas, la valeur spécifiée dans le paramétrage des variables normatives est prise en compte. Cela provoque un saut à la fin du graphique. Cette étude confirme que l'inclinaison maximale recommandée est d'environ 20°.
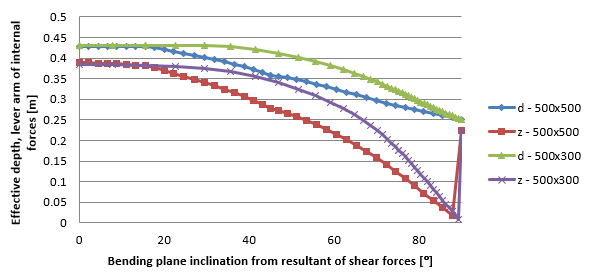
\[ \textsf{\textit{\footnotesize{\qquad Dependence between effective depth, lever arm to the bending plane inclination and the resultant of shear forces.}}}\]
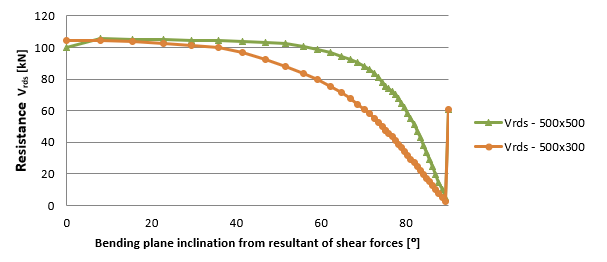
\[ \textsf{\textit{\footnotesize{\qquad Dependence between resistance Vrds to the bending plane inclination and the resultant of shear.}}}\]
Dans le cadre des tests de l'application RCS, une étude sur la dépendance de la résistance au cisaillement en fonction de la variation de l'effort normal a été réalisée. La résistance VRd,max est affectée uniquement par le coefficient αcw, voir Fig. 1.20. La Fig. 1.21 montre une valeur constante de la résistance VRds. Pour la résistance VRdc, les diminutions sont causées par l'augmentation de l'effort normal. La courbe bleue de la Fig. 1.21 montre la résistance VRdc en négligeant l'influence des fissures et a été calculée à l'aide de la formule de la section 6.2.2 (1) [2]. Le saut dans la transition entre la compression et la traction est causé par le ferraillage tendu contributif. La courbe rouge est calculée à l'aide de la formule de la section 6.2.2 (2) [2]. Après l'apparition de la première fissure, la courbe de dépendance est identique à celle de 6.2.2 (1) [2].
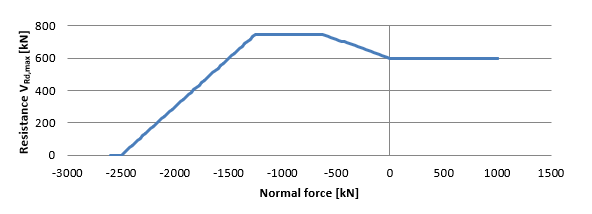
\[ \textsf{\textit{\footnotesize{\qquad Dependency curve of shear resistance VRd,max to normal force.}}}\]
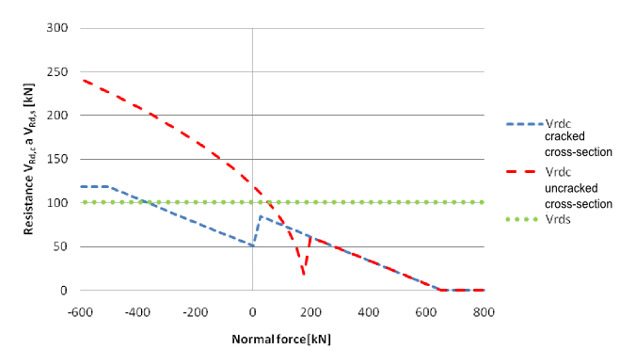
\[ \textsf{\textit{\footnotesize{\qquad Dependency of shear resistances VRd,c a VRd,s to normal force.}}}\]
Torsion
Hypothèses de calcul
Le comportement d'une section en béton armé soumise à la torsion peut être divisé en deux catégories - avant et après l'apparition des premières fissures. Avant la fissuration, la section transversale se comporte comme un matériau élastique. La contrainte de torsion peut être exprimée par la formule
\[\tau =~\frac{{{T}_{Ed}}}{{{W}_{t}}}\]
où Wt est le module de section en torsion.
Les fissures dans un élément non armé dues à la contrainte principale de traction en torsion constituent également un état limite ultime. Le comportement d'une section en béton armé soumise à la torsion peut être décrit sur la base d'une section fermée à paroi mince, voir la figure ci-dessous.
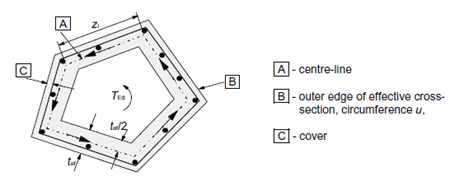
\[ \textsf{\textit{\footnotesize{\qquad Equivalent thin-walled cross-section.}}}\]
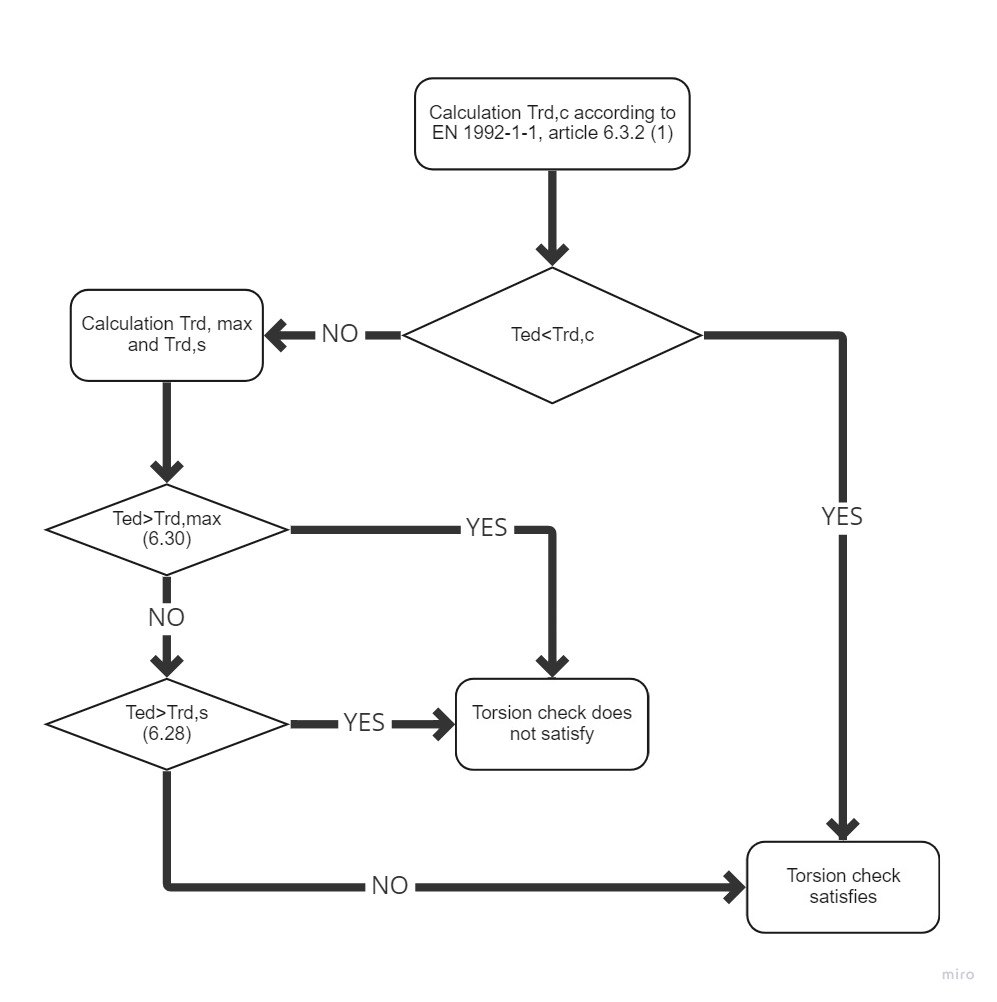
Procédure de calcul
La procédure de vérification normative d'une section en béton armé à la torsion est très similaire à la vérification au cisaillement. Tout d'abord, on vérifie la résistance du béton. Si la vérification du béton est satisfaite, le ferraillage peut être dimensionné en appliquant les règles de détaillage. Dans le cas contraire, il est nécessaire de vérifier le ferraillage et la résistance des diagonales comprimées par le calcul.
\[ \textsf{\textit{\footnotesize{\qquad Process diagram for torsion check.}}}\]
Résistance
Le flux de cisaillement dans la paroi d'une section à paroi mince soumise à la torsion peut être exprimé comme suit :
\[ {{\tau }_{t}}{{t}_{ef}}=~\frac{{{T}_{Ed}}}{2{{A}_{k}}}\]
L'effort tranchant dans la paroi d'une section à paroi mince peut être exprimé comme suit :
\[ V={{\tau }_{t}}{{t}_{ef}}z\]
Où
τ Flux de cisaillement dans la paroi,
tef est l'épaisseur effective de la paroi,
z est la longueur du côté de la paroi,
TEd est le moment de torsion,
Ak est l'aire délimitée par les lignes médianes des parois de liaison, y compris les zones creuses intérieures.
Le moment de fissuration en torsion peut être déterminé en substituant fctd dans l'expression précédente. On obtient ainsi l'expression de la résistance à la torsion sans ferraillage de torsion.
\[ {{T}_{Rd,c}}=2{{A}_{k}}{{t}_{ef}}{{f}_{ctd}}\]
où fctd valeur de calcul de la résistance à la traction axiale du béton
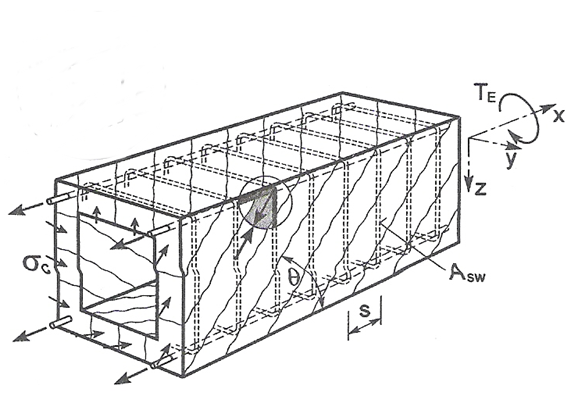
\[ \textsf{\textit{\footnotesize{\qquad Principles of Truss analogy for member under torsion moment.}}}\]
La résistance de l'élément avec ferraillage de torsion est composée de la résistance des diagonales comprimées en béton, basée sur la méthode de l'analogie du treillis. La contrainte de compression dans la diagonale peut être exprimée à l'aide de l'effort tranchant dans la paroi d'une section à paroi mince sur la surface de paroi considérée, soit :
\[{{\sigma }_{c}}=\frac{\frac{{{T}_{Ed}}z}{2{{A}_{k}}\sin \theta }}{z~{{t}_{ef}}\cos \theta }=\frac{{{T}_{Ed}}}{2{{A}_{k}}{{t}_{ef}}\sin \theta \cos \theta }\]
En substituant σc=σcwfcd et TEd=TRd,max et en exprimant TRd,max on obtient l'équation de la résistance des diagonales comprimées :
\[{{T}_{Rd,max}}=2~\nu ~{{\alpha }_{cw}}~{{f}_{cd}}~{{A}_{k}}~{{t}_{ef~\sin \theta ~\cos \theta }}\]
où
ν = 0,6 pour fck ≤ 60MPa ou pour fck > 60MPa
αcw coefficient tenant compte de l'état de contrainte de compression dans la membrure comprimée
fcd valeur de calcul de la résistance à la compression du béton
la résistance du ferraillage transversal soumis à la torsion est également basée sur la contrainte dans la diagonale comprimée. L'effort dans l'étrier est égal à la contrainte dans la diagonale comprimée sur l'aire correspondant à la ligne d'étrier considérée, soit :
\[{{A}_{sw}}{{f}_{ywd}}=\frac{{{T}_{Ed}}}{2{{A}_{k}}{{t}_{ef}}\sin \theta \cos \theta }~{{t}_{ef}}~s{{\sin }^{2}}\theta =\frac{{{T}_{Ed}}~s}{2{{A}_{k}}\cot \theta }~\]
En substituant TEd=TRd,s et en exprimant TRd,s on obtient l'équation :
\[{{T}_{Rd,s}}=2{{A}_{k}}\frac{{{A}_{sw}}{{f}_{ywd}}}{s}~\cot \theta\]
Si les quantités de ferraillage longitudinal et transversal sont connues, on peut définir l'angle θ par l'expression :
\[{{\tan }^{2}}\theta =\frac{\frac{{{A}_{sw}}{{f}_{ywd}}}{s}}{\frac{{{A}_{sl}}{{f}_{yd}}}{{{u}_{k}}}}\]
En substituant TRd,s on obtient :
\[{{T}_{Rd,s}}=2{{A}_{k}}\sqrt{\frac{{{A}_{sw}}}{s}{{f}_{ywd~}}\frac{{{A}_{sl}}}{{{u}_{k}}}~{{f}_{yd}}}\]
Où
Asw aire du ferraillage transversal
s est l'espacement radial des étriers du ferraillage transversal
fywd est la résistance de calcul effective du ferraillage transversal
Asl aire du ferraillage longitudinal
uk est le périmètre extérieur de la section transversale
fywd est la résistance de calcul effective du ferraillage longitudinal
L'effort dans le ferraillage longitudinal peut être déduit de l'effort tranchant dans la paroi d'une section soumise à un moment de torsion pur, qui est donné par :
\[V=\frac{{{T}_{Ed}}}{2{{A}_{k}}}{{u}_{k}}\]
Cet effort est transformé en direction longitudinale et on obtient :
\[{{F}_{l}}=\frac{{{T}_{Ed}}{{u}_{k}}}{2{{A}_{k}}~\tan \theta }\]
La plage admissible des valeurs de l'angle θ est similaire à celle de la vérification au cisaillement, soit 1 < cot θ < 2,5. La dépendance entre les résistances est illustrée dans la figure ci-dessous. Le diagramme montre qu'avec l'augmentation de l'angle θ, la résistance TRd,max croît, la résistance TRd.s décroît et la résistance TRd,c reste constante, car elle n'est pas basée sur la méthode de l'analogie du treillis.
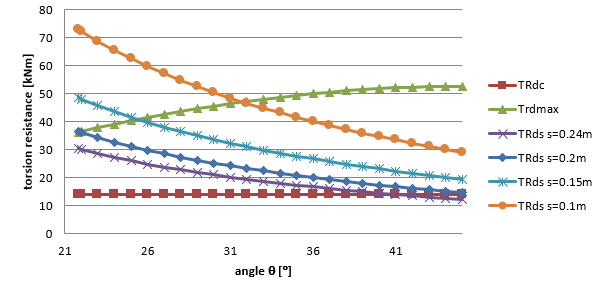
\[ \textsf{\textit{\footnotesize{\qquad Závislost únosnosti průřezu v kroucení na úhlu θ.}}}\]
Calcul des caractéristiques de la section transversale pour la torsion
Pour vérifier la section transversale à la torsion, il est nécessaire d'établir une section fermée à paroi mince équivalente. Pour déterminer les dimensions de la section à paroi mince équivalente, on suppose une forme rectangulaire. Pour l'aire réelle d'un rectangle, on a A = b×h et pour le périmètre du rectangle u =2 (b +h). En utilisant ces deux équations, on peut obtenir l'aire et le périmètre du rectangle à paroi mince équivalent de la section d'origine. En résolvant deux équations à deux inconnues, on obtient :
\[b=\frac{-u\pm \sqrt{{{u}^{2}}-16A}}{-4}\text{ }\!\!~\!\!\text{ }\]
\[h=\frac{\left( u-2\text{b} \right)}{2}\]
L'épaisseur de paroi de la section efficace peut être définie à partir du périmètre et de l'aire de la section comme suit :
\[t=\text{A}/\text{u}\]
Puis l'aire et le périmètre définis par la ligne médiane de la section efficace :
\[{{A}_{k}}=\left( \text{h}-\text{t} \right)\text{ }\!\!~\!\!\text{ }\left( \text{b}-\text{t} \right)\text{ }\!\!~\!\!\text{ }\]
\[{{u}_{k}}=2\left( \left( \text{h}-\text{t} \right)+\text{ }\!\!~\!\!\text{ }\left( \text{b}-\text{t} \right) \right)\]
La difficulté avec cette méthode concerne les sections de type T avec une large table lorsque l'aire totale et le périmètre sont utilisés pour calculer les dimensions (y compris cette table). Dans les versions futures du programme IDEA RCS, la sélection de la partie la plus massive de la section transversale sera activée, ce qui permettra de vérifier la torsion.
Interaction
Interaction de l'effort tranchant et de la torsion pour le ferraillage transversal
Détermination de l'effort dans le ferraillage transversal dû à l'effort tranchant.
Le calcul est basé sur la formule de calcul de la résistance du ferraillage transversal définie dans EN 1992-1-1. D'après l'équation 6.13 (chap. 6.2.3 (4)), la résistance portante d'une branche d'étrier peut être dérivée comme suit :
\[{{V}_{Rd,s}}=\frac{{{A}_{sw,V}}}{s}z{{f}_{ywd}}\left( \cot \theta +\cot \alpha \right)\sin \alpha \cos \beta \]
\[\frac{{{A}_{sw,V}}}{s}={{a}_{sw,V}}\]
Asw,V . . . aire de la section transversale d'une branche d'étrier résistant au cisaillement dans la section considérée
s . . . . . espacement du ferraillage transversal dans la direction de l'axe longitudinal de l'élément
asw,V . . . aire de la section transversale du ferraillage transversal par unité de longueur
z . . . . . le bras de levier intérieur. Pour un élément de hauteur constante, correspondant au moment fléchissant dans l'élément considéré. Dans l'analyse au cisaillement du béton armé sans effort normal, la valeur approchée z = 0,9d peut normalement être utilisée.
fywd . . . la valeur de calcul de la limite d'élasticité du ferraillage transversal
θ . . . . . l'angle entre la bielle comprimée en béton et l'axe de l'élément perpendiculaire à l'effort tranchant
α . . . . . l'angle entre le ferraillage transversal et l'axe de l'élément perpendiculaire à l'effort tranchant
β . . . . . inclinaison de la branche de l'étrier par rapport à la résultante de l'effort tranchant appliqué
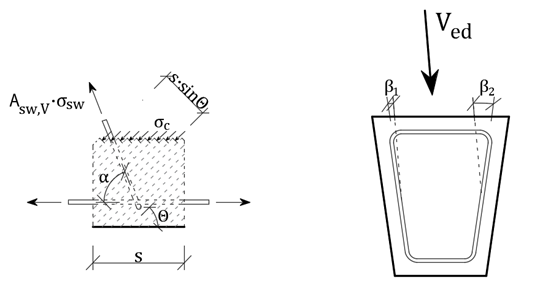
L'effort tranchant est redistribué uniformément entre les ferraillages individuels résistant à l'effort tranchant en fonction de l'angle du ferraillage et de la rigidité axiale des branches d'étriers individuelles.
\[{{V}_{ed}}={{V}_{ed,1}}+{{V}_{ed,2}}+...+{{V}_{ed,n}}\]
\[{{V}_{ed}}={{\varepsilon }_{sw,V}}\cdot z\cdot \sum\limits_{i=1}^{{{n}_{V}}}{{{a}_{sw,i,V}}\cdot {{E}_{sw,i,V}}\cdot \left( \cot \theta +\cot {{\alpha }_{i}} \right)\cdot {{\cos }^{2}}{{\beta }_{i}}}\]
De plus, la déformation moyenne du ferraillage considérée dans la direction de la résultante de l'effort tranchant peut être dérivée :
\[{{\varepsilon }_{sw,V}}=\frac{{{V}_{ed}}}{z\cdot \sum\limits_{i=1}^{{{n}_{V}}}{{{a}_{sw,i,V}}\cdot {{E}_{sw,i,V}}\cdot \left( \cot \theta +\cot {{\alpha }_{i}} \right)\cdot {{\cos }^{2}}{{\beta }_{i}}}}\]
La déformation réelle du i-ème ferraillage peut être calculée comme suit :
\[{{\varepsilon }_{sw,i,V}}=\frac{{{\varepsilon }_{sw,V}}}{\sin {{\alpha }_{i}}}\cdot \cos {{\beta }_{i}}\]
La traction dans une branche donnée du ferraillage :
\[{{\sigma }_{sw,i,V}}={{\varepsilon }_{sw,i,V}}\cdot {{E}_{si,V}}\]
Détermination de l'effort dans chaque étrier dû à la torsion
La résistance à la torsion d'une section peut être calculée sur la base d'une section fermée à paroi mince, dans laquelle l'équilibre est satisfait par un flux de cisaillement fermé. Les sections pleines peuvent être modélisées par des sections équivalentes à paroi mince. Pour les sections non pleines, l'épaisseur de paroi équivalente ne doit pas dépasser l'épaisseur de paroi réelle.
Le flux de cisaillement dans les parois d'une section fermée à paroi mince dû à la torsion peut être calculé comme suit :
\[{{\tau }_{t}}\cdot {{t}_{ef}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\]
L'effort tranchant dans une paroi particulière est alors :
\[{{V}_{i}}={{\tau }_{t}}\cdot {{t}_{ef}}\cdot {{l}_{i}}\]
li . . . . longueur de la ligne médiane de la paroi considérée
Effort tranchant dans l'âme - la longueur de la ligne médiane de l'âme peut être substituée par la valeur du bras de levier « z ».
\[{{V}_{ed,T}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cdot z\]
Effort dans les étriers résistant à la torsion par mètre de longueur de l'élément (par unité de longueur) :
\[{{F}_{sw,T}}=\frac{{{V}_{ed,T}}}{z\cdot \cot \theta }=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cdot tg\theta\]
Décomposition des efforts pour chaque étrier
Si le même matériau est défini pour tous les étriers, la contrainte résultante due à la torsion dans chaque branche d'étrier est constante. Alors :
\[{{\sigma }_{sw,T}}=\frac{{{F}_{sw,T}}}{{{a}_{sw,T}}}\]
où asw,T est l'aire totale des étriers résistant à la torsion par unité de longueur.
Dans le cas où les étriers individuels ont des matériaux différents, la rigidité axiale des barres individuelles doit être prise en compte.
\[{{F}_{sw,T}}={{F}_{s1,T}}+{{F}_{s2,T}}+{{F}_{s3,T}}+...+{{F}_{sn,T}}=\sum\limits_{i=1}^{{{n}_{T}}}{{{F}_{si,T}}}\]
\[{{\varepsilon }_{sw,T}}=\frac{{{F}_{sw,T}}}{\sum\limits_{i=1}^{{{n}_{T}}}{\left( {{a}_{si,T}}\cdot {{E}_{si,T}} \right)}}\]
nT . . . . nombre de branches de ferraillage (groupes de ferraillage) résistant à la torsion
Fsi,T . . . effort dans le i-ème groupe de ferraillage résultant de la torsion par unité de longueur
asi,T . . . aire de la section transversale du ferraillage transversal résistant à la torsion par unité de longueur
Esi,T . . . module d'élasticité de Young du i-ème groupe de ferraillage résistant à la torsion
εsw,T . . déformation dans le ferraillage due à la torsion
La contrainte résultante dans chaque étrier due à la torsion appliquée est calculée comme suit :
\[{{\sigma }_{sw,i,T}}={{\varepsilon }_{sw,T}}\cdot {{E}_{si,T}}\]
Interaction V+T
Le calcul des contraintes dans les étriers dues au cisaillement et à la torsion est alors une sommation des contraintes dues aux composantes de charge individuelles.
\[{{\sigma }_{sw,i}}={{\sigma }_{sw,i,V}}+{{\sigma }_{sw,i,T}}\]
Effort résultant dans le i-ème ferraillage :
\[{{F}_{sw,i}}={{a}_{sw,i}}\cdot {{\sigma }_{sw,i}}\]
Interaction du cisaillement, de la torsion et de la flexion pour le ferraillage longitudinal
Détermination de l'effort dans chaque ferraillage longitudinal dû à l'effort normal et au moment fléchissant
L'application RCS est utilisée pour calculer la réponse de la section transversale due à la combinaison de l'effort normal et du moment fléchissant afin de déterminer la contrainte et la déformation dans les barres longitudinales individuelles et le ferraillage de précontrainte.
Détermination de l'effort dans chaque ferraillage longitudinal dû à l'effort tranchant
L'incrément de l'effort de traction dans le ferraillage longitudinal ΔFtd dû à l'effort tranchant dépend de la géométrie du modèle Bielle-et-tirant.
\[\Delta {{F}_{td}}={{V}_{ed}}\left( \cot \theta -\cot \alpha \right)\]
ΔFtd . . . incrément de l'effort de traction dans le ferraillage longitudinal dû à l'effort tranchant
Ved . . . . valeur de calcul de l'effort tranchant agissant dans la section considérée
θ . . . . . l'angle entre la bielle comprimée en béton et l'axe de l'élément
α . . . . . l'angle entre le ferraillage transversal et l'axe de l'élément
Pour le ferraillage longitudinal situé dans la membrure tendue, l'effort résultant Ft dans le ferraillage longitudinal dû à la combinaison N+M+V ne doit pas être supérieur à MEd,max/z (où MEd,max est le moment maximal le long de la poutre)
\[{{F}_{t}}=\frac{{{M}_{Ed}}}{z}+0,5{{V}_{ed}}\left( \cot \theta -\cot \alpha \right)\le \frac{{{M}_{Ed,\max }}}{z}\]
L'effort ΔFtd est transmis par tous les câbles de précontrainte adhérents et le ferraillage situé dans la partie de la section transversale qui résiste au cisaillement (l'âme dans le cas d'un profilé en I). Par sécurité, la contribution du ferraillage de précontrainte peut être considérée comme nulle. L'hypothèse du calcul est que l'incrément de la déformation axiale du ferraillage longitudinal individuel résistant au cisaillement est constant (Δεs1,V = Δεs2,V = .... =Δεp1,V = Δεp2,V = ... = ΔεV = const.). La dérivation est valable pour un diagramme de travail bilinéaire du ferraillage avec une branche plastique horizontale. Dans le cas d'un diagramme avec une branche inclinée, le calcul doit être modifié.
\[\Delta {{F}_{td}}=\Delta {{F}_{s}}+\Delta {{F}_{s}}\]
\[\Delta {{F}_{td}}=\Delta {{\varepsilon }_{V}}\cdot \sum\limits_{i=1}^{{{n}_{s,V}}}{{{A}_{sl,i,V}}\cdot {{E}_{sl,i,V}}}+\Delta {{\varepsilon }_{V}}\cdot \sum\limits_{i=1}^{{{n}_{p,V}}}{{{A}_{pl,i,V}}\cdot {{E}_{pl,i,V}}}\]
ΔεV . . . . incrément de déformation dans le ferraillage longitudinal dû à l'effort tranchant
ns,V . . . . nombre de ferraillages longitudinaux résistant à l'effort tranchant
Asl,i,V . . . aire du i-ème ferraillage longitudinal résistant à l'effort tranchant
Esl,i,V . . . module d'élasticité de Young du i-ème ferraillage longitudinal résistant à l'effort tranchant
np,V . . . . nombre de câbles de précontrainte résistant à l'effort tranchant
Apl,i,V . . . aire du i-ème câble de précontrainte résistant à l'effort tranchant
Epl,i,V . . . module d'élasticité de Young du i-ème câble de précontrainte résistant à l'effort tranchant
Après détermination de la valeur de l'effort ΔFtd, la déformation moyenne du ferraillage ΔεV peut alors être calculée.
\[\Delta {{\varepsilon }_{V}}=\frac{\Delta {{F}_{td}}}{\sum\limits_{i=1}^{{{n}_{s,V}}}{{{A}_{sl,i,V}}\cdot {{E}_{sl,i,V}}}+\sum\limits_{i=1}^{{{n}_{p,V}}}{{{A}_{pl,i,V}}\cdot {{E}_{pl,i,V}}}}\]
Incrément de contrainte dans les barres longitudinales individuelles dû à l'effort tranchant appliqué :
pour armature \[\Delta {{\sigma }_{sl,i,V}}=\Delta {{\varepsilon }_{V}}\cdot {{E}_{sl,i,V}}\]
pour câble de précontrainte \[\Delta {{\sigma }_{pl,i,V}}=\Delta {{\varepsilon }_{V}}\cdot {{E}_{pl,i,V}}\]
Détermination de l'effort dans chaque ferraillage longitudinal dû à la torsion
Il est très important de déterminer le ferraillage longitudinal qui résiste à la torsion. Il s'agit du ferraillage situé dans une section transversale à paroi mince équivalente résistant à la torsion.
\[\frac{\sum{{{A}_{sl}}{{f}_{yd}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta \]
Conformément à EN 1992-1-1, plusieurs conditions doivent être satisfaites pour le ferraillage longitudinal résistant à la torsion :
- le ferraillage doit être uniformément réparti sur la longueur zi, mais dans les sections de petite dimension, le ferraillage peut être concentré aux angles de l'étrier
- la distance axiale maximale du ferraillage longitudinal est de 350 mm
La contribution du ferraillage de précontrainte n'est pas prise en compte conformément à EN 1992-1-1.
La norme EN 1992-2 stipule que la contribution du ferraillage de précontrainte peut être prise en compte, mais l'incrément de contrainte maximal dans le ferraillage de précontrainte ne doit pas dépasser Δσp ≤ 500MPa. La formule peut alors être modifiée :
\[\frac{\sum{{{A}_{sl}}{{f}_{yd}}+\sum{{{A}_{p}}\Delta {{\sigma }_{p}}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
Cependant, bien que l'incrément du ferraillage de précontrainte puisse être pris en compte, ce choix appartient à l'utilisateur. Actuellement, le ferraillage de précontrainte n'est pas pris en compte dans le calcul.
L'hypothèse du calcul est que l'incrément de la déformation axiale de chaque ferraillage longitudinal résistant au cisaillement est constant (Δεs1,T = Δεs2,T = .... =Δεp1,T = Δεp2,T = ... = ΔεT = const.). La dérivation est valable pour un diagramme de travail bilinéaire du ferraillage avec une branche plastique horizontale. Dans le cas d'un diagramme avec une branche croissante, le calcul doit être modifié.
\[\frac{\sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot \Delta {{\sigma }_{s,i,T}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
\[\frac{\sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot \Delta {{\varepsilon }_{T}}\cdot {{E}_{s,i,T}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
\[\Delta {{\varepsilon }_{T}}=\frac{{{T}_{ed}}\cdot {{u}_{k}}}{2{{A}_{k}}\cdot \sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot {{E}_{s,i,T}}}}\cot \theta\]
\[\frac{\sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot \Delta {{\sigma }_{s,i,T}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
\[\frac{\sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot \Delta {{\varepsilon }_{T}}\cdot {{E}_{s,i,T}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
\[\Delta {{\varepsilon }_{T}}=\frac{{{T}_{ed}}\cdot {{u}_{k}}}{2{{A}_{k}}\cdot \sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot {{E}_{s,i,T}}}}\cot \theta\]
Ted . . . . la valeur de calcul du moment de torsion appliqué dans la section considérée
θ . . . . . inclinaison des diagonales comprimées par rapport à l'axe longitudinal de la poutre (identique à celle pour l'effort tranchant)
uk . . . . périmètre de l'aire Ak
Af . . . . l'aire définie par la ligne médiane de la section à paroi mince creuse de substitution
ns,T . . . .nombre de ferraillages longitudinaux en béton résistant à la torsion
Asl,i,T . . . aire du i-ème ferraillage longitudinal en béton résistant à la torsion
ΔεT . . . .la variation de déformation du ferraillage longitudinal due au moment de torsion
Δσs,i,T . . variation de contrainte dans le i-ème ferraillage longitudinal due au moment de torsion
Esl,i,T . . . module d'élasticité du i-ème ferraillage longitudinal en béton résistant à la torsion
Incrément de contrainte dans chaque ferraillage longitudinal dû au moment de torsion appliqué :
\[\Delta {{\sigma }_{sl,i,T}}=\Delta {{\varepsilon }_{T}}\cdot {{E}_{sl,i,T}}\]
Vérification de la limitation des contraintes
La vérification est basée sur des hypothèses générales, où deux états de la section transversale sont résolus : la section non fissurée (la résistance à la traction du béton n'est pas ignorée) et la section entièrement fissurée (la résistance à la traction du béton est ignorée). La solution avec la résistance à la traction du béton ignorée est considérée selon les hypothèses de l'Article 7.1 (2) EN 1992-1-1.
Lors du calcul des contraintes et des déflexions, la section est considérée comme non fissurée si la contrainte de traction en flexion ne dépasse pas fct, eff. La valeur de fct, eff peut être considérée comme fctm ou fctm,fl. La valeur fctm est utilisée lors du calcul de la largeur de fissure et du raidissement en traction.
Dans le cadre de cette vérification, nous traitons quatre cas de base en termes de limite de contrainte.
- 7.2 (2) La contrainte de compression dans les éléments exposés aux environnements des classes d'exposition XD, XF et XS doit être limitée :
\[\left| {{s}_{c}} \right|\le {{k}_{1}}{{f}_{ck}}\]
\[{{k}_{1}}=0,6\]
- 7.2 (3) La contrainte dans le béton sous les charges quasi-permanentes est limitée :
\[\left| {{s}_{c}} \right|\le {{k}_{2}}{{f}_{ck}}\]
\[{{k}_{2}}=0,45\]
- 7.2 (5) Les contraintes de traction dans le ferraillage sous la combinaison caractéristique des charges doivent être limitées :
\[\left| {{s}_{s}} \right|\le {{k}_{3}}{{f}_{yk}}\]
\[{{k}_{3}}=0,8\]
- 7.2 (5) Lorsque la contrainte est causée par une déformation imposée, la contrainte de traction ne doit pas dépasser :
\[\left| {{s}_{s}} \right|\le {{k}_{4}}{{f}_{yk}}\]
\[{{k}_{4}}=1\]
Les valeurs k1, k2, k3, k4 applicables dans un pays peuvent être trouvées dans son Annexe Nationale. Les valeurs recommandées sont respectivement 0,8 ; 1 et 0,75, la limite d'élasticité caractéristique du ferraillage, fck résistance caractéristique sur cylindre fck déterminée à 28 jours.
Fissures
Formation des fissures
Une caractéristique des structures en béton armé soumises à la flexion ou à la traction est l'apparition de fissures aux points où la contrainte de traction dans le béton dépasse la résistance à la traction du béton. Pour la durabilité de la structure ainsi que pour son aspect esthétique, il est important de s'assurer que les fissures résultantes soient aussi petites que possible. Le calcul des largeurs de fissures ainsi que les largeurs maximales admissibles pour les différentes classes d'exposition sont donnés dans l'EN 1992-1-1, Chapitre 7.3.
Dans la première étape du calcul, on détermine si la section transversale est fissurée ou non. La largeur de fissure elle-même est toujours calculée à partir de la combinaison de charges quasi-permanente ou fréquente (selon l'annexe nationale), mais la formation des fissures doit être vérifiée à partir de toutes les combinaisons ELS spécifiées. Ainsi, deux cas peuvent se présenter :
- La contrainte de traction maximale dans les fibres de béton ne dépassera la résistance à la traction du béton pour aucune combinaison de charges (quasi-permanente ME,qp, fréquente ME,fr, ou caractéristique ME,k), et donc on considère la section transversale sans fissures.
\[{{M}_{E,i}}\le {{M}_{cr}}={{f}_{ct,ef}}\frac{{I}_{I}}{h-{{a}_{I}}}\]
- Si des fissures se développent pour l'une des combinaisons (quasi-permanente, fréquente ou caractéristique), c'est-à-dire si le moment fléchissant développé à partir de la combinaison de charges considérée est supérieur au moment critique Mcr, la section transversale est fissurée pour cette combinaison de charges, et les caractéristiques de la section fissurée ainsi que la largeur de fissure doivent être calculées.
\[{{M}_{E,i}}>{{M}_{cr}}={{f}_{ct,ef}}\frac{{I}_{I}}{h-{{a}_{I}}}\]
ME,i . . le moment fléchissant obtenu à partir d'une combinaison de charges ELS. Il peut donc s'agir de ME,qp, ME,fr, ou ME,k.
fct,ef . . la résistance à la traction du béton au moment considéré. Si le béton a plus de 28 jours, on considère une résistance égale à fctm.
Calcul de la largeur de fissure
Dans un élément soumis à la flexion, la formation des fissures est divisée en 2 phénomènes :
- Phase de formation des fissures (étape numéro 2 sur la Fig. 1)
- Développement stabilisé des fissures (étape numéro 3 sur la Fig. 1)
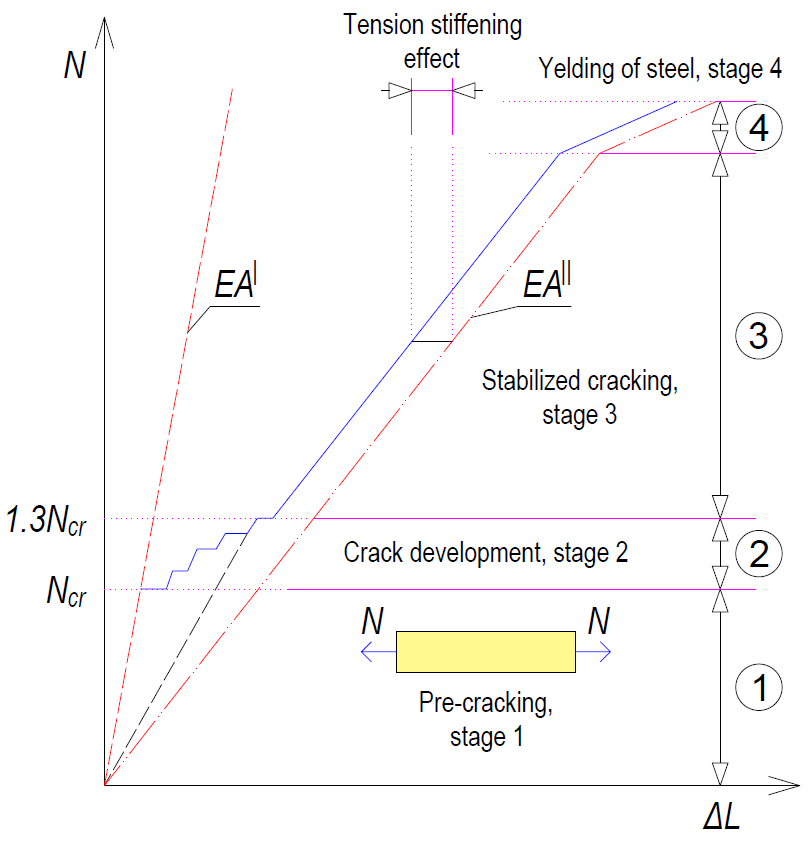
\[ \textsf{\textit{\footnotesize{Fig. 1 Stages of the behavior of the reinforced concrete cross-section during loading}}}\]
Phase de développement des fissures
Il s'agit de la partie initiale du processus où des fissures individuelles apparaissent encore progressivement jusqu'à ce que toute la partie tendue de l'élément soit affectée par des fissures approximativement également réparties sur la longueur de l'élément. La première fissure se forme lorsque l'effort dans la bande tendue dépasse la valeur de l'effort critique Nr (effort de traction critique, voir ci-dessous), et d'autres fissures se développent jusqu'à un niveau de charge exerçant un effort dans la bande tendue égal à environ 1,3Ncr (phase numéro 2 sur la Fig. 1).
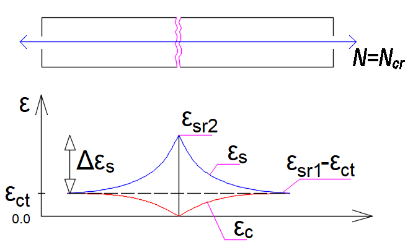
\[ \textsf{\textit{\footnotesize{Fig. 2 Strains of concrete and reinforcement at the moment of the first crack}}}\]
Les fissures qui se développent sont divisées en 2 types - fissures primaires et secondaires. Les fissures primaires apparaissent dans les fibres tendues lorsque la résistance à la traction effective du béton (fct,eff) est atteinte. Les fissures primaires représentent le premier schéma de fissuration (Fig. 2). Des fissures secondaires plus courtes se forment ensuite entre les fissures primaires (Fig. 3). Pour des contraintes correspondant à environ 1,2 à 1,5 σsr (généralement une valeur moyenne de 1,3 σsr est considérée, où σsr est la contrainte dans le ferraillage lors de la formation des fissures primaires dans la zone tendue du béton), le développement des fissures secondaires est également achevé.
\[ \textsf{\textit{\footnotesize{Fig. 3 Primary and secondary cracks}}}\]
La largeur de fissure au stade de formation des fissures peut être calculée comme suit :
\[{{w}_{k}}=2{{l}_{s,\max }}\left( {{\varepsilon }_{sm}}-{{\varepsilon }_{cm}} \right)\]
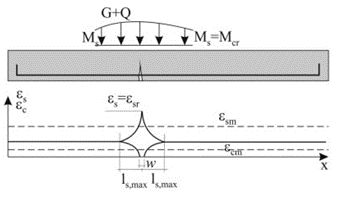
\[ \textsf{\textit{\footnotesize{Fig. 4 Characteristics of the transmission length for the first crack}}}\]
Phase de fissuration stabilisée
Après avoir dépassé environ 1,3 fois l'effort critique dans la zone tendue, aucune nouvelle fissure ne se forme, le nombre de fissures dans l'élément est stabilisé, et seule la largeur des fissures existantes augmente avec le chargement supplémentaire (étape numéro 3 sur la Fig. 1).
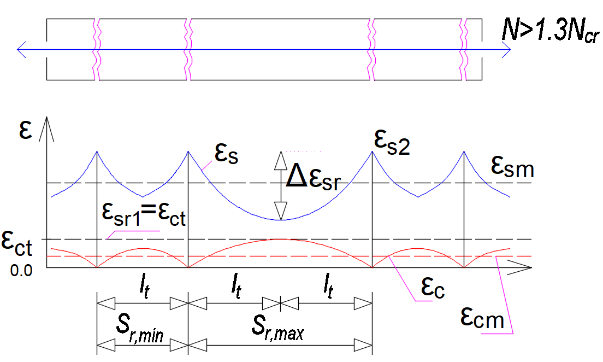
\[ \textsf{\textit{\footnotesize{Fig. 5 Strains of concrete and reinforcement at the stabilized cracking stage}}}\]
La largeur de fissure lors du développement stable peut être calculée comme suit :
\[{{w}_{k}}={{s}_{r,\max }}\left( {{\varepsilon }_{sm}}-{{\varepsilon }_{cm}} \right)\]
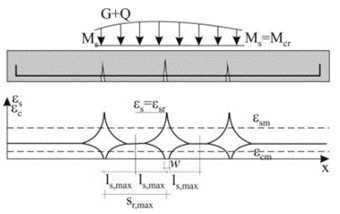
\[ \textsf{\textit{\footnotesize{Fig. 6 Stabilized cracking}}}\]
Effort de traction critique
Le calcul est basé sur le Modèle de Bielle de Traction (Tension Chord Model, TCM). La considération de base est de calculer la capacité ultime d'une bande en béton armé formée par une barre d'armature de section As,eff entourée d'une aire effective de béton tendu Ac,eff, capable de résister à la contrainte de traction jusqu'à ce que la résistance à la traction fct,eff soit dépassée (on considère normalement fctm). En supposant une adhérence parfaite entre le ferraillage et le béton, on peut considérer que jusqu'à l'apparition de la première fissure, la déformation du ferraillage et du béton environnant est identique. L'effort maximal dans la bande tendue juste avant la première fissure Nr peut alors être déterminé :
\[{{N}_{r}}={{A}_{c,eff}}\cdot {{f}_{ctm}}+{{A}_{s,eff}}\cdot {{\sigma }_{s}}\]
En introduisant la substitution
\[{{\alpha }_{e}}={}^{{{E}_{s}}}/{}_{{{E}_{cm}}};{{\rho }_{p,eff}}={}^{{{A}_{s,eff}}}/{}_{{{A}_{c,eff}}}\]
on obtient :
\[{{N}_{r}}={{A}_{c,eff}}\cdot {{f}_{ctm}}\cdot \left( 1+{{\alpha }_{e}}\cdot {{\rho }_{p,eff}} \right)\]
Juste après la formation de la première fissure, l'effort total Nr est repris par le ferraillage et ainsi la contrainte dans le ferraillage traversant la fissure qui vient de se former peut être calculée comme suit :
\[{{\sigma }_{sr}}=\frac{{{f}_{ctm}}}{{{\rho }_{p,eff}}}\cdot \left( 1+{{\alpha }_{e}}\cdot {{\rho }_{p,eff}} \right)\Rightarrow {{\varepsilon }_{sr}}=\frac{{{f}_{ctm}}}{{{E}_{s}}\cdot {{\rho }_{p,eff}}}\cdot \left( 1+{{\alpha }_{e}}\cdot {{\rho }_{p,eff}} \right)\]
Calcul de la largeur de fissure selon l'EC 1992-1-1
L'équation suivante est utilisée pour calculer la largeur des fissures dans les éléments en béton armé :
\[{{w}_{k}}={{s}_{r,\max }}\left( {{\varepsilon }_{sm}}-{{\varepsilon }_{cm}} \right)\]
sr,max . . . espacement maximal des fissures
εsm . . . . la déformation moyenne du ferraillage issue de la combinaison de charges, incluant les effets du raidissement en traction.
εcm . . . . déformation moyenne du béton entre les fissures
Calcul de la différence de déformation
La différence de déformation entre le ferraillage et le béton entre les fissures peut être obtenue à partir de l'équation :
\[{{\varepsilon }_{sm}}-{{\varepsilon }_{cm}}=\frac{{{\sigma }_{s}}-{{k}_{t}}\cdot \frac{{{f}_{ct,eff}}}{{{\rho }_{p,eff}}}\cdot \left( 1+{{\alpha }_{e}}\cdot {{\rho }_{p,eff}} \right)\,}{{{E}_{s}}}\ge 0,6\frac{{{\sigma }_{s}}}{{{E}_{s}}}\]
σs . . . . la contrainte dans le ferraillage au niveau de la fissure issue de la combinaison de charges considérée
kt . . . . un coefficient empirique tenant compte de la déformation moyenne, dépendant de la durée du chargement. Il peut prendre la valeur de 0,6 pour une analyse à court terme. Pour l'analyse à long terme, la réduction de la rigidité du composite à environ 70 % est prise en compte, sa valeur est donc de 0,4, ce qui inclut le taux de dégradation de la cohésion entre le ferraillage et le béton au cours du temps.
αe . . . . le rapport effectif des modules d'élasticité
\[{{\alpha }_{e}}={}^{{{E}_{s}}}/{}_{{{E}_{cm}}}\]
ςp,eff . . . . taux de ferraillage effectif
\[{{\rho }_{p,eff}}={}^{\left( {{A}_{s,eff}}+{{\xi }^{2}_{1}}A_{p}^{\acute{\ }} \right)}/{}_{{{A}_{c,eff}}}\]
Ac,eff . . . . l'aire effective du béton tendu entourant le ferraillage (détermination de Ac,eff ci-dessous)
As,eff . . . . l'aire du ferraillage adhérent situé dans la zone Ac,eff
Ap´ . . . . est l'aire des câbles de précontrainte pré- ou post-tendus dans Ac,eff
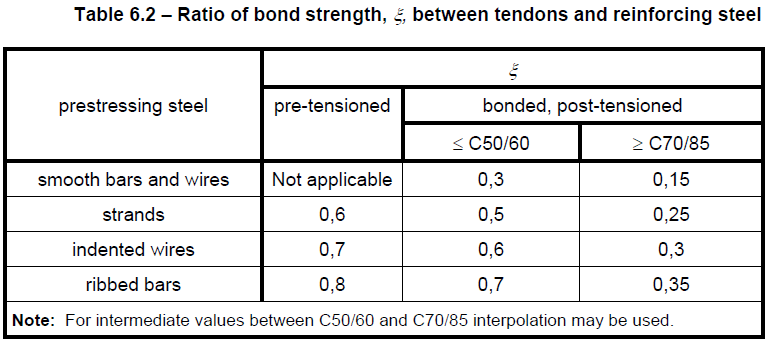
ξ1 . . . . . est le rapport ajusté de la résistance d'adhérence, tenant compte des différents diamètres des aciers de précontrainte et d'armature :
\[{{\xi }_{1}}=\sqrt{\xi \,\cdot \,\frac{{{\phi }_{s}}}{{{\phi }_{p}}}}\]
ξ . . . le rapport de la résistance d'adhérence des aciers de précontrainte et d'armature (Tableau 6.2)
ϕs . . le plus grand diamètre de barre du ferraillage
ϕp . . le diamètre ou le diamètre équivalent de l'acier de précontrainte
Pour les torons groupés, Ap est l'aire du ferraillage dans le câble de précontrainte
\[{{\phi }_{p}}=1,6\sqrt{{{A}_{p}}}\]
Pour les torons à sept fils individuels où φwire est le diamètre du fil
\[{{\phi }_{p}}=1,75\,\,{{\phi }_{wire}}\]
Pour les torons à trois fils individuels où φwire est le diamètre du fil
\[{{\phi }_{p}}=1,20\,\,{{\phi }_{wire}}\]
Si seul le ferraillage de précontrainte est utilisé pour prévenir la fissuration, il faut alors considérer ce qui suit.
\[{{\xi }_{1}}=\sqrt{\xi \,}\]
Dans les éléments précontraints, une aire minimale de ferraillage adhérent n'est pas requise tant que, sous la combinaison de charges caractéristique et la valeur caractéristique de la force de précontrainte, la contrainte de traction dans toute fibre n'est pas supérieure à la résistance à la traction du béton, fct,eff. (voir EN 1992-1-1 ch. 7.3.2 pour plus de détails)
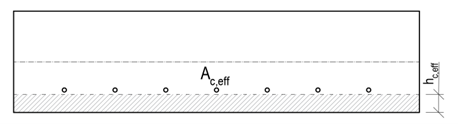
L'aire effective du béton tendu
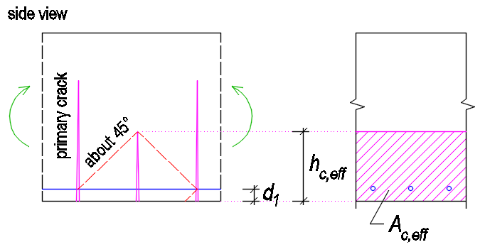
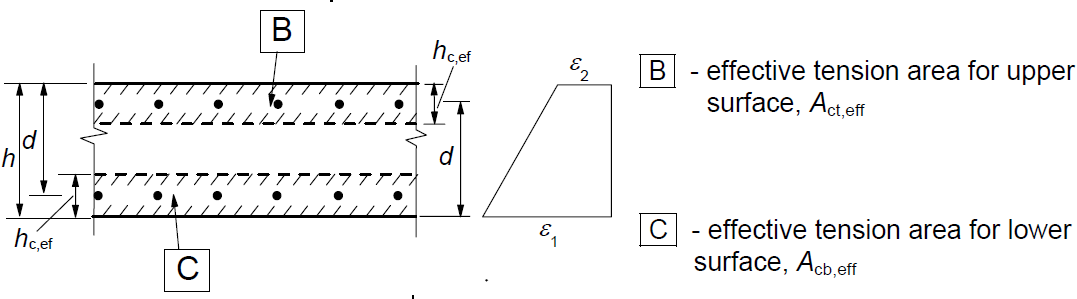
Une étape importante mais simultanément la plus complexe du calcul est la détermination de l'aire effective du béton tendu entourant le ferraillage. L'Eurocode et le Model Code considèrent tous deux des modes de chargement simples, où l'élément en béton armé est soumis à la flexion uniaxiale ou à la traction. La valeur de la hauteur effective est déterminée comme suit :
\[{{h}_{c,eff}}=\min \left\{ 2,5\left( h-d \right);\frac{\left( h-x \right)}{3};{}^{h}/{}_{2} \right\}\]
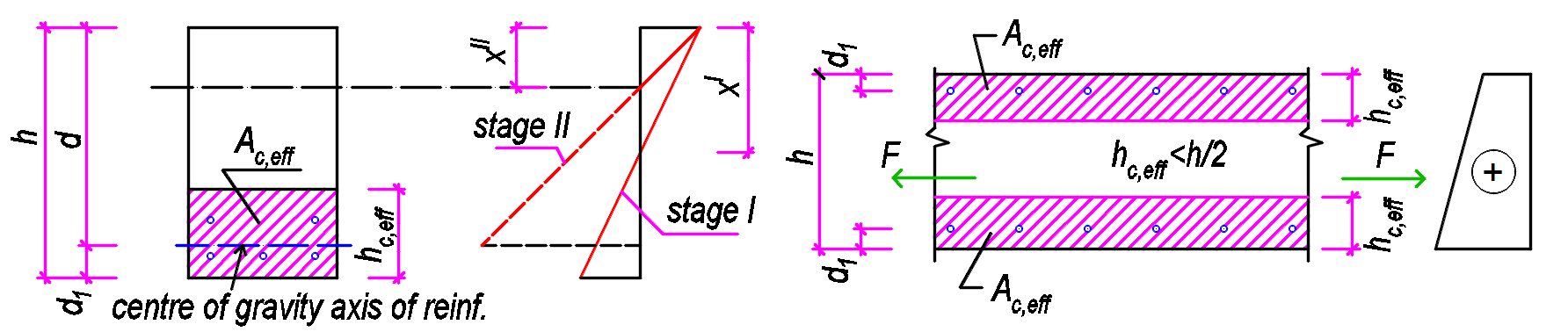
\[ \textsf{\textit{\footnotesize{Fig. 6 Determination of Ac,eff for bent members (left) and members in tension (right)}}}\]
En général, la valeur hc,eff = 2,5(h-d) est déterminante. Pour les éléments tendus, la limite supérieure est h/2, tandis que pour les éléments fléchis elle est (h-x)/3. Cependant, l'aire Ac,eff est également limitée par la largeur déterminée à partir de l'équation 5(c+ϕ/2). Si l'espacement des ferraillages est supérieur à 5(c+ϕ/2), alors l'aire effective du béton tendu de largeur 5(c+ϕ/2) est considérée pour les barres individuelles.
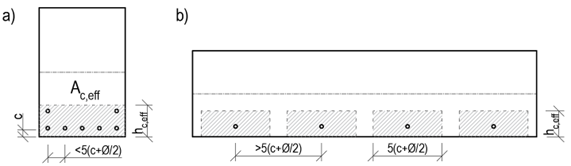
\[ \textsf{\textit{\footnotesize{Fig. 9 Determination of Ac,eff based on reinforcement spacing}}}\]
Distance maximale entre fissures
Lors du calcul de la distance maximale entre fissures sr,max, deux cas peuvent se présenter :
- La distance axiale du ferraillage adhérent ne dépasse pas une distance de 5(c+ϕ/2) - Fig. 9a
- La distance axiale du ferraillage adhérent est supérieure à 5(c+ϕ/2) - Fig. 9b
Le calcul de la distance maximale entre fissures sr,max pour le cas où les distances axiales des ferraillages ne dépassent pas la valeur 5(c+ϕ/2) est défini comme suit :
\[{{s}_{r,\max }}={{k}_{3}}c+{{k}_{1}}{{k}_{2}}{{k}_{4}}\frac{\phi }{{{\rho }_{p,eff}}}\]
c . . . . . valeur de l'enrobage en mm. Étant donné que la valeur de l'enrobage peut être différente pour le ferraillage de rive par rapport aux bords horizontaux et verticaux, il est recommandé de considérer la valeur maximale d'enrobage trouvée pour le ferraillage considéré.
ϕ . . . . diamètre du ferraillage adhérent. En cas de diamètres de ferraillage différents, le diamètre équivalent doit être calculé conformément à l'équation 7.12 de l'EN 1992-1-1.
\[{{\phi }_{eq}}=\frac{{{n}_{1}}\phi _{1}^{2}+{{n}_{2}}\phi _{2}^{2}}{{{n}_{1}}{{\phi }_{1}}+{{n}_{2}}{{\phi }_{2}}}\]
k1 . . . . est un coefficient qui tient compte des propriétés d'adhérence du ferraillage adhérent
- k1 = 0,8 pour les barres à haute adhérence
- k1 = 1,6 pour les barres à surface effectivement lisse (par exemple les câbles de précontrainte)
k2 . . . . est un coefficient qui tient compte de la distribution des déformations
- k2 = 1,0 pour la flexion
- k2 = 0,5 pour la traction pure
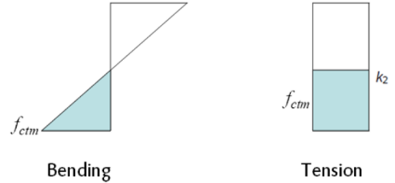
Pour les cas de traction excentrée ou pour les zones locales, des valeurs intermédiaires de k2 doivent être utilisées, pouvant être calculées à partir de la relation :
\[{{k}_{2}}=\frac{{{\varepsilon }_{1}}+{{\varepsilon }_{2}}}{2{{\varepsilon }_{1}}}\]
k3 . . . . coefficient exprimant la longueur de la zone proche d'une fissure où l'adhérence entre le béton et le ferraillage est rompue. La valeur recommandée de base EC k3 = 3,4 peut être modifiée par l'Annexe Nationale.
k4 . . . . coefficient exprimant la relation entre la résistance d'adhérence et la résistance à la traction du béton. La valeur recommandée de base EC k4 = 0,425 peut être ajustée par l'Annexe Nationale.
Le calcul de la distance maximale entre fissures sr,max pour le cas où les distances axiales des ferraillages dépassent la valeur 5(c+ϕ/2) est défini comme suit :
\[{{s}_{r,\max }}=1,3\left( h-x \right)\]
Les valeurs de la distance maximale entre fissures selon l'équation
\[{{s}_{r,\max }}=1,3\left( h-x \right)\]
doivent toujours être supérieures aux valeurs déterminées par l'équation
\[{{s}_{r,\max }}={{k}_{3}}c+{{k}_{1}}{{k}_{2}}{{k}_{4}}{\phi }/{{{\rho }_{p,eff}}}\;\]
dans le cas contraire, il est recommandé de considérer la distance la plus grande obtenue à partir des équations ci-dessus. L'équation pour la déformation dans le béton/ferraillage n'est pas modifiée pour le cas de la grande distance axiale du ferraillage. Dans les zones avec des largeurs de fissures contrôlées, la distance axiale des ferraillages individuels ne doit pas être supérieure à 5(c+ϕ/2).
Calcul de la largeur de fissure implémenté dans RCS
Détermination de l'aire effective Ac,eff
Étant donné qu'il n'est pas si simple de déterminer quel ferraillage peut être considéré comme ferraillage longitudinal résistant à la fissuration, Ac,eff est déterminé en utilisant le processus itératif suivant.
- De tout le ferraillage travaillant en traction, le centre de l'effort de traction Cg,s,1 est déterminé. La hauteur utile du ferraillage d est la distance entre Cg,s et la fibre de béton la plus comprimée, calculée dans la direction du moment fléchissant résultant. En même temps, la position de l'axe neutre et la hauteur de la zone comprimée x pour la section fissurée sont déterminées. Cela permet de déterminer la hauteur effective hc,eff :
\[{{h}_{c,eff}}=\min \left\{ 2,5\left( h-d \right);\frac{\left( h-x \right)}{3};{}^{h}/{}_{2} \right\}\]
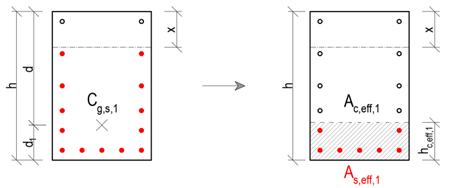
- En excluant tout le ferraillage situé en dehors de Ac,eff,1, le nouveau centre du ferraillage Cg,s,2 est déterminé, ainsi que la nouvelle hauteur utile du ferraillage d ; la hauteur effective hc,eff est déterminée de la même manière qu'à l'étape précédente, uniquement avec des valeurs d'entrée modifiées.
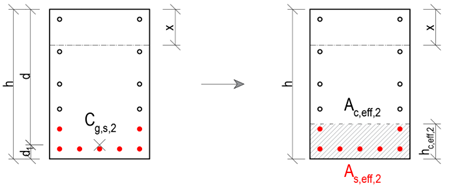
Il est à nouveau vérifié que tout le ferraillage tendu considéré se trouve dans Ac,eff,2. Si cette condition est satisfaite, l'itération peut être arrêtée et les valeurs de hc,eff,2, Ac,eff,2 et As,eff,2 sont affichées comme valeurs résultantes dans IDEA StatiCa RCS.
Cas possibles de calcul de la largeur de fissure
En général, trois cas peuvent se présenter lors du calcul des largeurs de fissures :
- Le ferraillage tendu se trouve dans la région Ac,eff, avec une distance axiale entre les ferraillages individuels inférieure à 5(c+ϕ/2). Les définitions suivantes sont alors utilisées pour le calcul :
\[{{s}_{r,\max }}={{k}_{3}}c+{{k}_{1}}{{k}_{2}}{{k}_{4}}\frac{\phi }{{{\rho }_{p,eff}}}\]
\[{{\varepsilon }_{sm}}-{{\varepsilon }_{cm}}=\frac{{{\sigma }_{s}}-{{k}_{t}}\,\cdot \,\frac{{{f}_{ct,eff}}}{{{\rho }_{p,eff}}}\,\cdot \,\left( 1+\,{{\alpha }_{e}}\cdot \,{{\rho }_{p,eff}} \right)\,\,}{{{E}_{s}}}\ge 0,6\frac{{{\sigma }_{s}}}{{{E}_{s}}}\]
- Le ferraillage tendu se trouve dans Ac,eff, avec une distance axiale entre les ferraillages individuels dépassant la distance 5(c+ϕ/2). Les définitions suivantes sont alors utilisées pour le calcul :
\[{{s}_{r,\max }}=1,3\left( h-x \right)\]
\[{{\varepsilon }_{sm}}-{{\varepsilon }_{cm}}=\frac{{{\sigma }_{s}}-{{k}_{t}}\,\cdot \,\frac{{{f}_{ct,eff}}}{{{\rho }_{p,eff}}}\,\cdot \,\left( 1+\,{{\alpha }_{e}}\cdot \,{{\rho }_{p,eff}} \right)\,\,}{{{E}_{s}}}\ge 0,6\frac{{{\sigma }_{s}}}{{{E}_{s}}}\]
- Le ferraillage tendu ne se trouve pas dans Ac,eff (cela peut être causé, par exemple, par un enrobage important).
Dans ce cas, il ne serait pas possible de calculer la largeur des fissures. Par conséquent, le calcul de la hauteur effective hc,eff est modifié comme suit :
\[{{h}_{c,eff}}=\min \left\{ 2,5\left( h-d \right);h/2 \right\}\]
En même temps, la non-conformité suivante est affichée :
L'aire effective du béton tendu entourant le ferraillage ou les câbles de précontrainte de hauteur hc,eff, où hc,eff est la valeur minimale entre 2,5(h – d) et h/2. En considérant la valeur comme (h – x)/3, le ferraillage se trouve en dehors de l'aire effective du béton tendu, et il ne serait donc pas possible de calculer la largeur de fissure conformément à l'article 7.3.4.
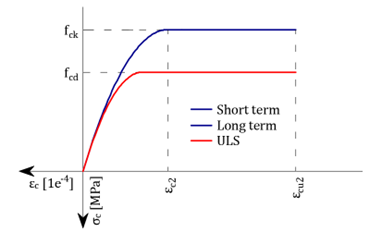
Diagramme N-M-κ
Le diagramme N-M-κ représente la courbure (rigidité en flexion) d'un élément en fonction du moment fléchissant appliqué et de l'effort normal. Il existe trois types de diagrammes N-M-κ :
- court terme,
- long terme
- ELU.
Ces diagrammes diffèrent par les types de diagrammes contrainte-déformation utilisés pour le calcul (expliqués ci-dessous).
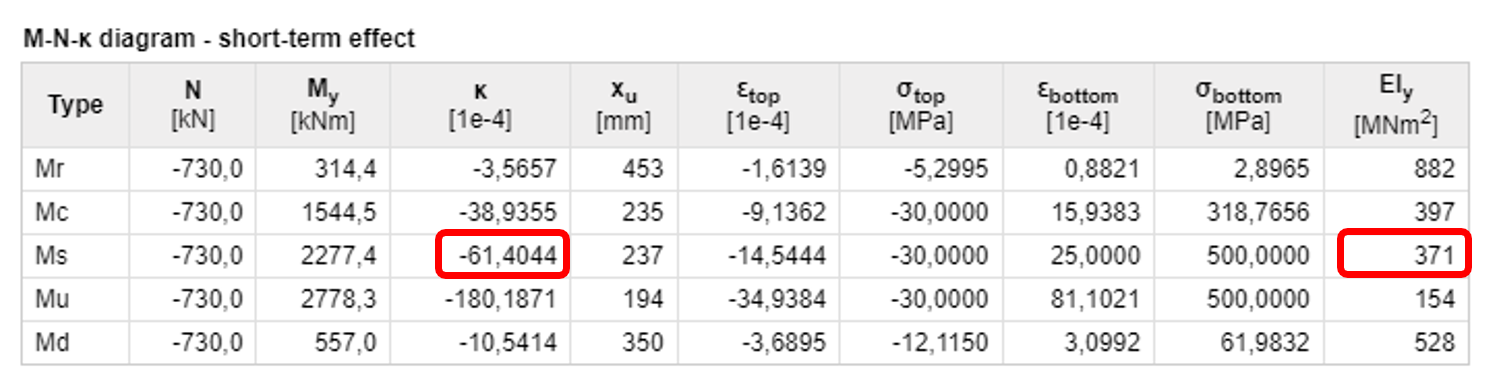
Le calcul de la rigidité pour des états caractéristiques sélectionnés de la section transversale est utilisé pour déterminer le diagramme N-M-κ. En général, il peut s'agir de n'importe quel état de section à partir duquel la réponse est calculée et dont la rigidité en flexion et la courbure sont déduites. Dans IDEA RCS, nous considérons quatre points caractéristiques (Mr, Mc, Ms et Mu)
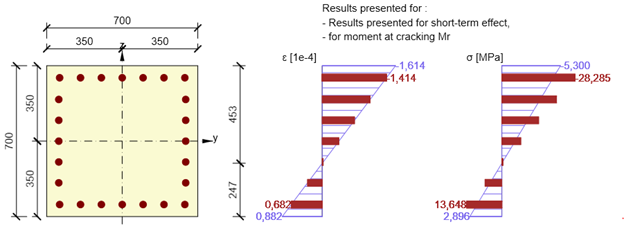
Mr - le moment de fissuration
La section transversale est soumise à un effort normal défini par l'utilisateur et le plan de déformation commence à pivoter (dans la direction du moment fléchissant spécifié) jusqu'à ce que la résistance ultime en traction du béton soit atteinte dans une fibre de béton (pour la classe de béton C30/37, cela correspond à fctm = 2,896 MPa). Un diagramme contrainte-déformation bilinéaire avec une branche plastique horizontale est utilisé pour le calcul, aussi bien pour le ferraillage que pour le béton.
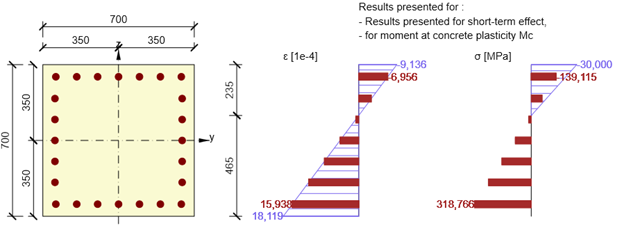
Mc - le moment fléchissant lorsque la résistance en compression du béton est atteinte
À partir de l'étape précédente, la fibre de béton la plus sollicitée en compression est identifiée. Pour cette fibre, la déformation à la résistance ultime du béton (fck/Ecm pour le court terme, fck/Eceff pour le long terme et fcd/Ecm pour le diagramme ELU) est fixée. Sur la base de l'effort normal défini et de la direction du moment fléchissant, le processus itératif de recherche du plan de déformation est lancé afin de trouver un équilibre entre la réponse de la section transversale et l'effort normal défini. Un diagramme contrainte-déformation bilinéaire avec une branche plastique horizontale est utilisé pour le calcul, aussi bien pour le ferraillage que pour le béton.
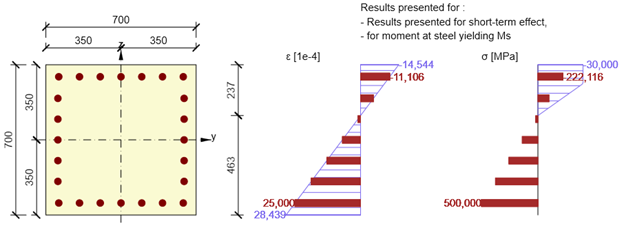
Ms - le moment fléchissant lorsque la limite d'élasticité est atteinte dans la barre de ferraillage la plus sollicitée
Un autre point caractéristique du diagramme N-M-κ est l'état de contrainte de la section transversale lorsque la limite d'élasticité est atteinte dans la barre de ferraillage la plus sollicitée (la déformation de la barre est égale à fyk/Es pour les diagrammes court et long terme, fyd/Es pour le diagramme ELU). Le processus itératif trouve un équilibre des efforts normaux dans la section transversale en faisant pivoter le plan de déformation autour du point défini par la position de la barre de ferraillage la plus sollicitée. Un diagramme contrainte-déformation bilinéaire avec une branche plastique horizontale est utilisé pour le calcul, aussi bien pour le ferraillage que pour le béton.
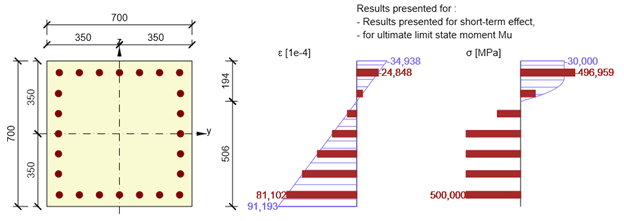
Mu - le moment fléchissant à l'état limite ultime
Il s'agit de la capacité portante ultime d'une section transversale en flexion, lorsque la section est soumise à l'effort normal de calcul défini Ned. Pour le calcul de la capacité de la section transversale, on suppose que la résistance en compression dans la fibre de béton la plus sollicitée et la résistance en traction dans la barre de ferraillage la plus sollicitée sont atteintes (déformation maximale pour le béton εcu = 0,1 et pour le ferraillage εs,max = 0,5). Un diagramme contrainte-déformation bilinéaire avec une branche plastique horizontale pour le ferraillage et un diagramme parabole-rectangle pour le béton sont utilisés pour le calcul.
La rigidité et la courbure résultantes dues à la combinaison définie par l'utilisateur d'effort normal et de moment fléchissant (Md) sont ensuite calculées par interpolation linéaire des points caractéristiques individuels du diagramme N-M-κ.
Calcul des rigidités et des courbures
Les rigidités et les courbures pour chaque état de contrainte de la section transversale (Mr, Mc, Ms ou Mu) sont calculées directement à partir de la rotation du plan de déformation.
\[E{{A}_{x}}=\frac{N}{{{\varepsilon }_{x}}}\]
EAx . . rigidité axiale de l'élément
N . . . . l'effort normal spécifié
εx . . . déformation axiale au centre de gravité de la section en béton
\[E{{I}_{y}}=\frac{M}{\kappa }\]
EIy . . . rigidité en flexion de l'élément
M . . . le moment fléchissant calculé Mr, Mc, Ms ou Mu
κ . . . . la courbure de l'élément, calculée comme la tangente de l'angle entre le plan de déformation et l'axe longitudinal de l'élément
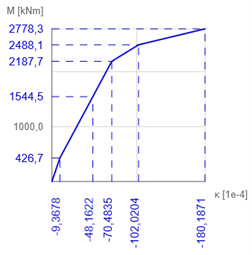
Exemple pratique
Une section transversale en béton (classe de béton C30/37) est ferraillée avec des armatures ϕ32 (nuance B500B). La combinaison quasi-permanente définie est N = -730 kN et My = 557 kNm.
Le plan de déformation pour le point caractéristique Ms est déterminé par IDEA RCS comme suit :
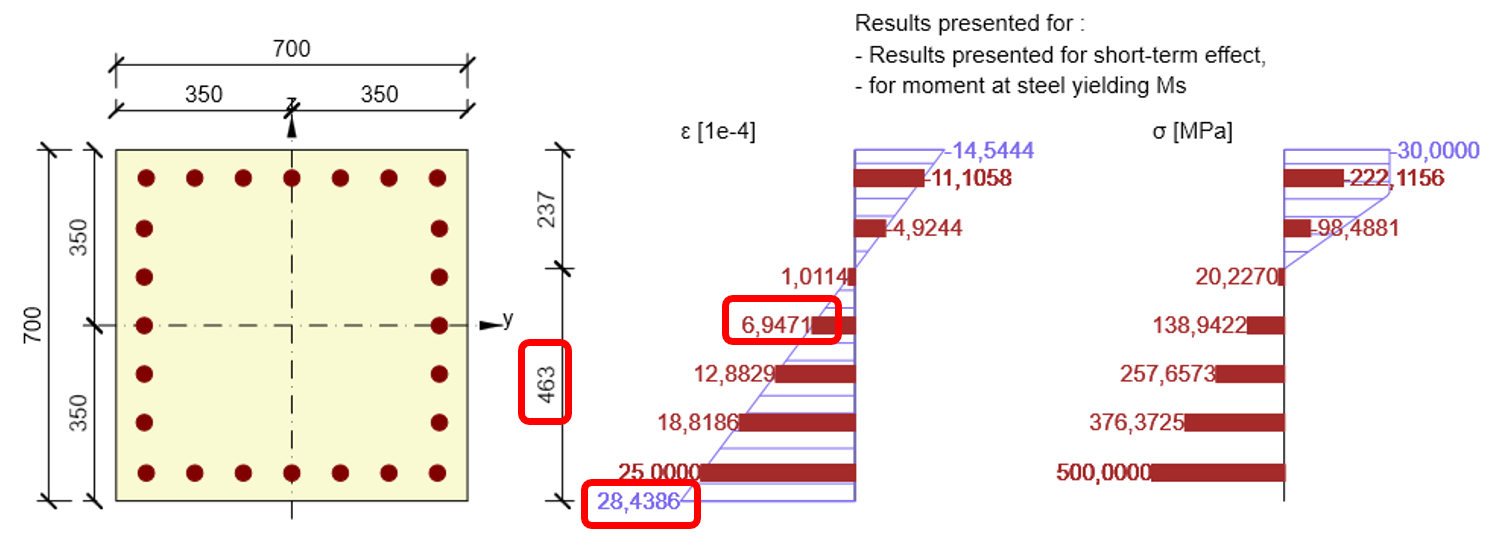
\[E{{A}_{x}}=\frac{N}{{{\varepsilon }_{x}}}=\frac{730}{6,9471\cdot {{10}^{-4}}}=1050,798MN\]
\[\kappa =\frac{28,4386\cdot {{10}^{-4}}}{0,463}=61,422\cdot {{10}^{-4}}{{m}^{-1}}\]
\[E{{I}_{y}}=\frac{{{M}_{s}}}{\kappa }=\frac{2277,4}{61,422\cdot {{10}^{-4}}}=370,776MN{{m}^{2}}\]
Diagrammes contrainte-déformation utilisés pour le calcul
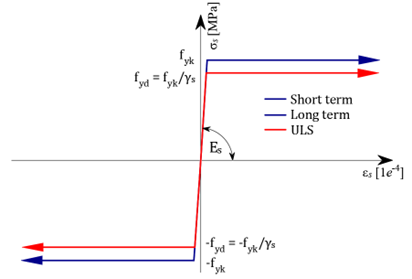
Ferraillage - Mr, Mc, Ms et Mu
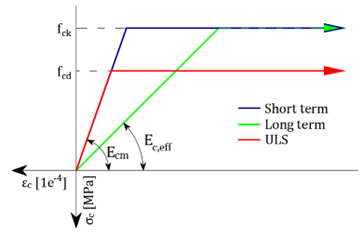
Béton - Mr, Mc, Ms
Béton - Mu
Littérature
[1] Bradáč Betonové konstrukce (structures en béton), 1ère partie : Dimensionnement des éléments en béton armé et en béton non armé, EXPERT Ostrava, 1996
[2] ČSN EN 1992-1-1 (73 1201) Eurocode 2 : Calcul des structures en béton - Partie 1-1 : Règles générales et règles pour les bâtiments, inc. modification NA éd. A (2007) et révision 1 (2009)
[3] ČSN EN 1992-2 (73 6208) Eurokód 2: Navrhování betonových konstrukcí - Část 2: Betonové mosty - Navrhování a konstrukční zásady
[4] Navrátil, J. Předpjaté betonové konstrukce. 2. vydání, Akademické nakladatelství CERM, Vysoké učení technické v Brně, Fakulta stavební, 2008
[5] Šmiřák, S. Pružnost a plasticita I, Vysoké učení technické v Brně, Akademické nakladatelství CERM, Brno, 1999
[6] Vondráček, R. Numerical Methods in Nonlinear Concrete Design, Diplomová práce, ČVUT, Praha, 2000
[7] Zich, M. a kolektiv Konstrukční Eurokódy - Příklady posouzení betonových prvků dle Eurokódů, livre en ligne http://www.stavebniklub.cz/konstrukcni-eurokody-onbecd/, Verlag Dashöfer, 2010