Approche de rigidité directe
Motivation
Avoir une compréhension approfondie de l'Analyse par Éléments Finis (AEF) est essentiel pour garantir des données d'entrée précises et présenter les résultats de manière appropriée. L'objectif principal de cet article est d'expliquer comment la matrice est assemblée en arrière-plan de tout logiciel AEF et comment la rigidité en rotation peut influencer le comportement global d'une structure. Cet article constitue un prérequis pour un article à venir, dans lequel toutes les conclusions seront appliquées à une structure à l'aide d'IDEA StatiCa Connection.
L'approche de rigidité directe – assemblages rigides
Examinons l'exemple simple d'une structure représentée à la figure 1. La structure est composée d'un poteau et d'une poutre avec des propriétés de section transversale identiques HEA 200. Chaque nœud possède trois degrés de liberté, dont deux translations (X et Z) et une rotation (Ry). L'espace de travail est en 2D. Le matériau est de l'acier avec un module d'élasticité de 200 000 MPa.
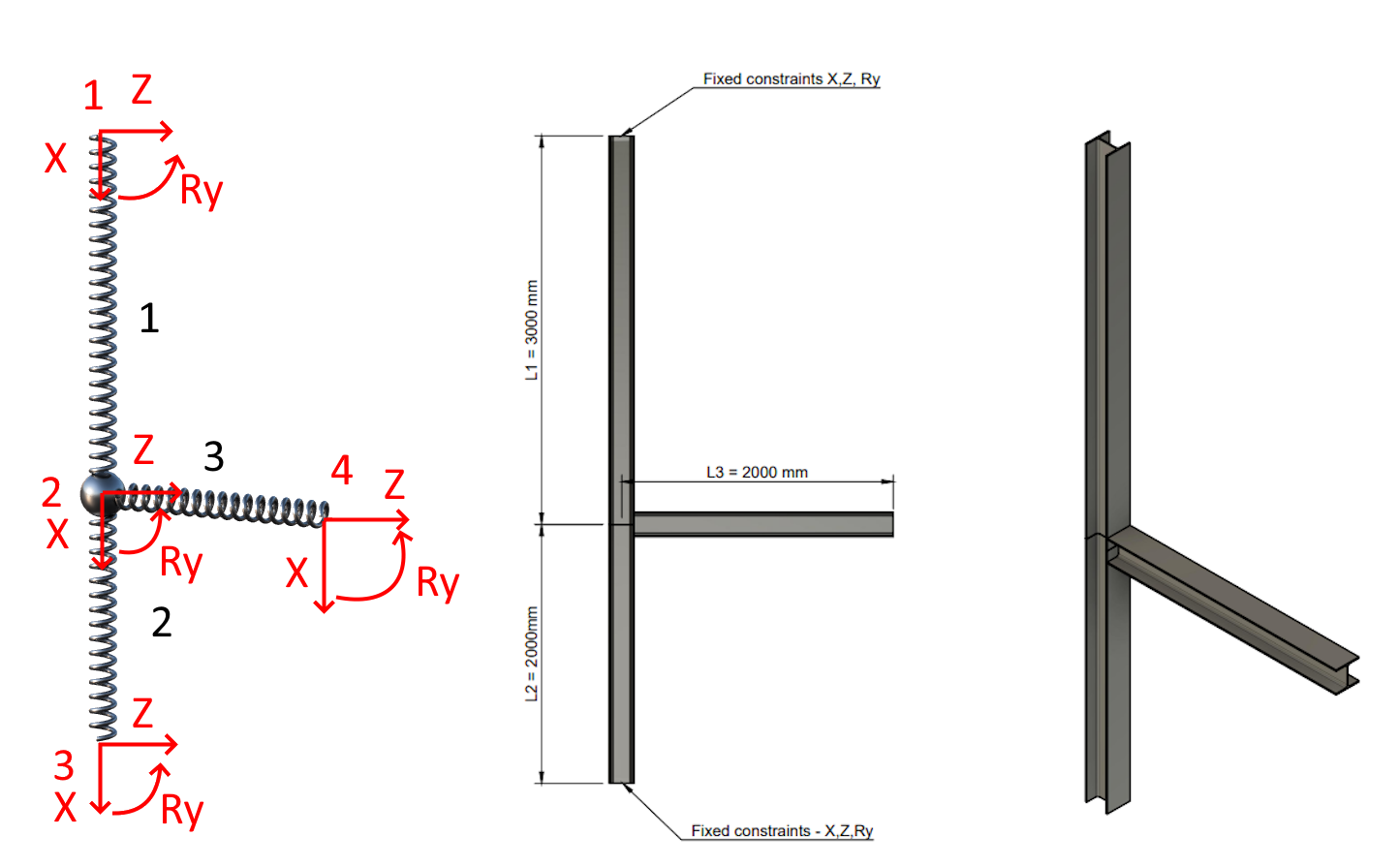
01) Modèle à ressort - SCG, géométrie, axonométrie + sections HEA 200
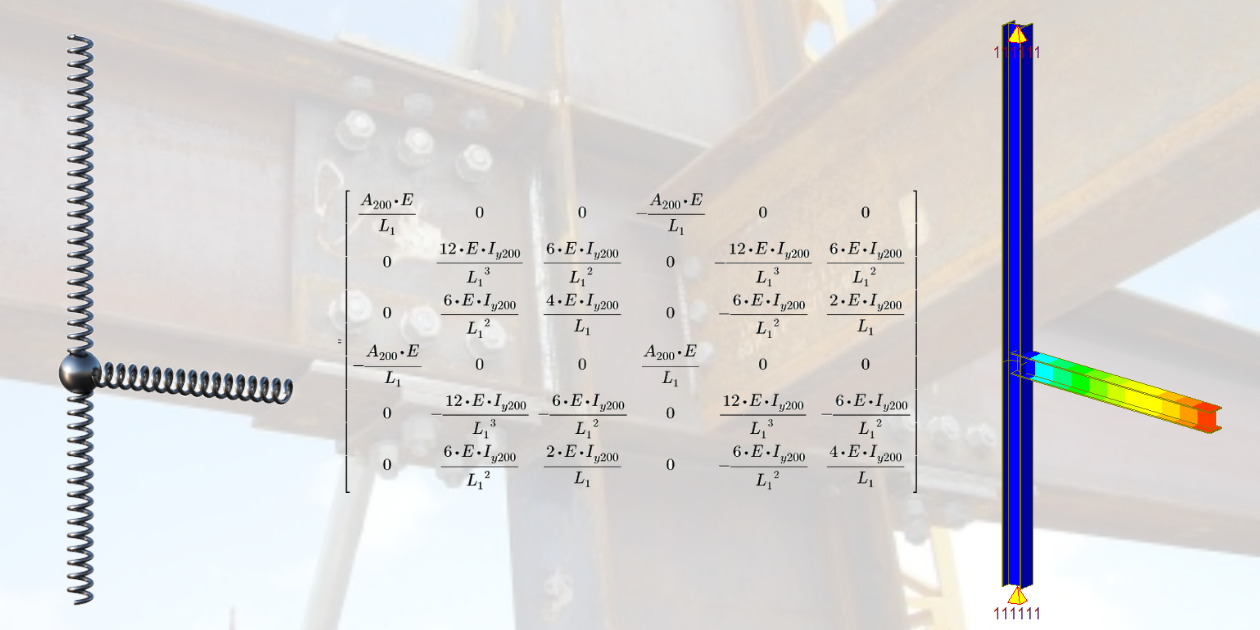
Matrice de rigidité locale
La matrice de rigidité régit la relation entre la variation des déplacements (et des rotations) aux extrémités de la poutre et les forces correspondantes (réactions). Il convient de noter que chaque nœud dans l'espace de travail 2D possède trois degrés de liberté (deux translations et une rotation), ce qui donne une matrice locale de dimensions 6x6. Cette matrice représente la rigidité normale, la rigidité au cisaillement et la rigidité en flexion de l'élément.
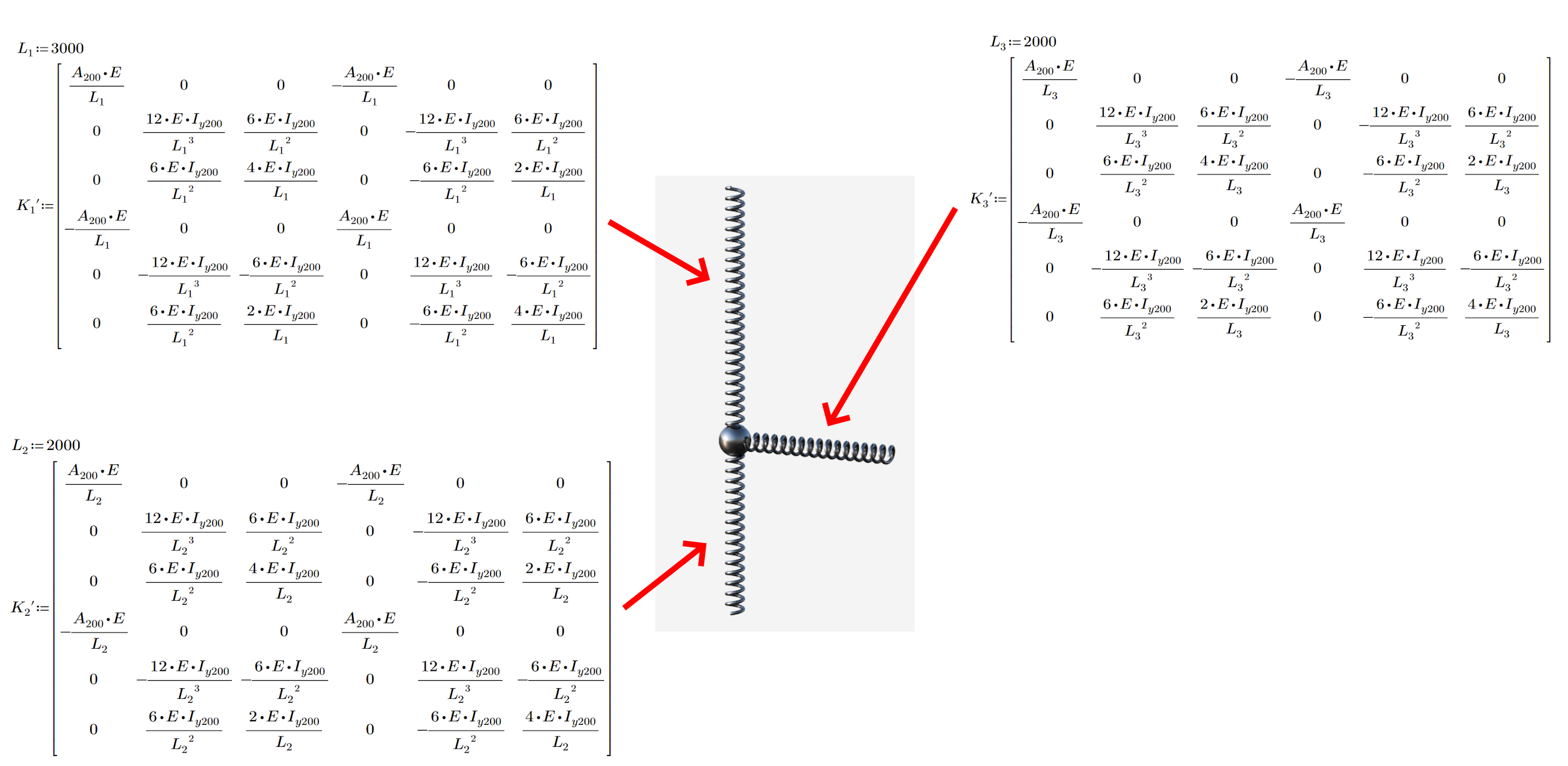
02) Matrice de rigidité locale de tous les éléments
Matrice de transformation
Dans 90 % des structures, la matrice de rigidité locale des éléments n'est pas alignée avec le système de coordonnées global. Seules les poutres simples alignées en ligne droite ont le même Système de Coordonnées Local (SCL) et Système de Coordonnées Global (SCG). Dans notre cas, le troisième élément est tourné de 90 degrés autour du nœud deux. Cette transformation est nécessaire pour les calculs à venir.

03) Matrice de transformation élément 1,2 ; Matrice de transformation élément 3
Transformation vers un système de coordonnées global
Pour un calcul précis des déplacements, il est essentiel d'aligner les systèmes de coordonnées de tous les éléments concernés. Une façon d'y parvenir est d'utiliser une matrice de transformation, qui simplifie le processus et permet une transition fluide vers le calcul des déplacements. La transformation ne modifie pas la matrice pour les éléments un et deux, car leur système de coordonnées local est identique au système global. En revanche, on peut observer une modification pour l'élément trois, qui est tourné d'environ 90 degrés. Les entrées pour les translations X et Z sont modifiées. Vous pouvez remarquer de petits nombres non nuls dans la matrice. Ceux-ci proviennent du processus numérique, mais comme ils sont relativement faibles par rapport à la rigidité globale, ils n'affectent pas les résultats de manière significative.
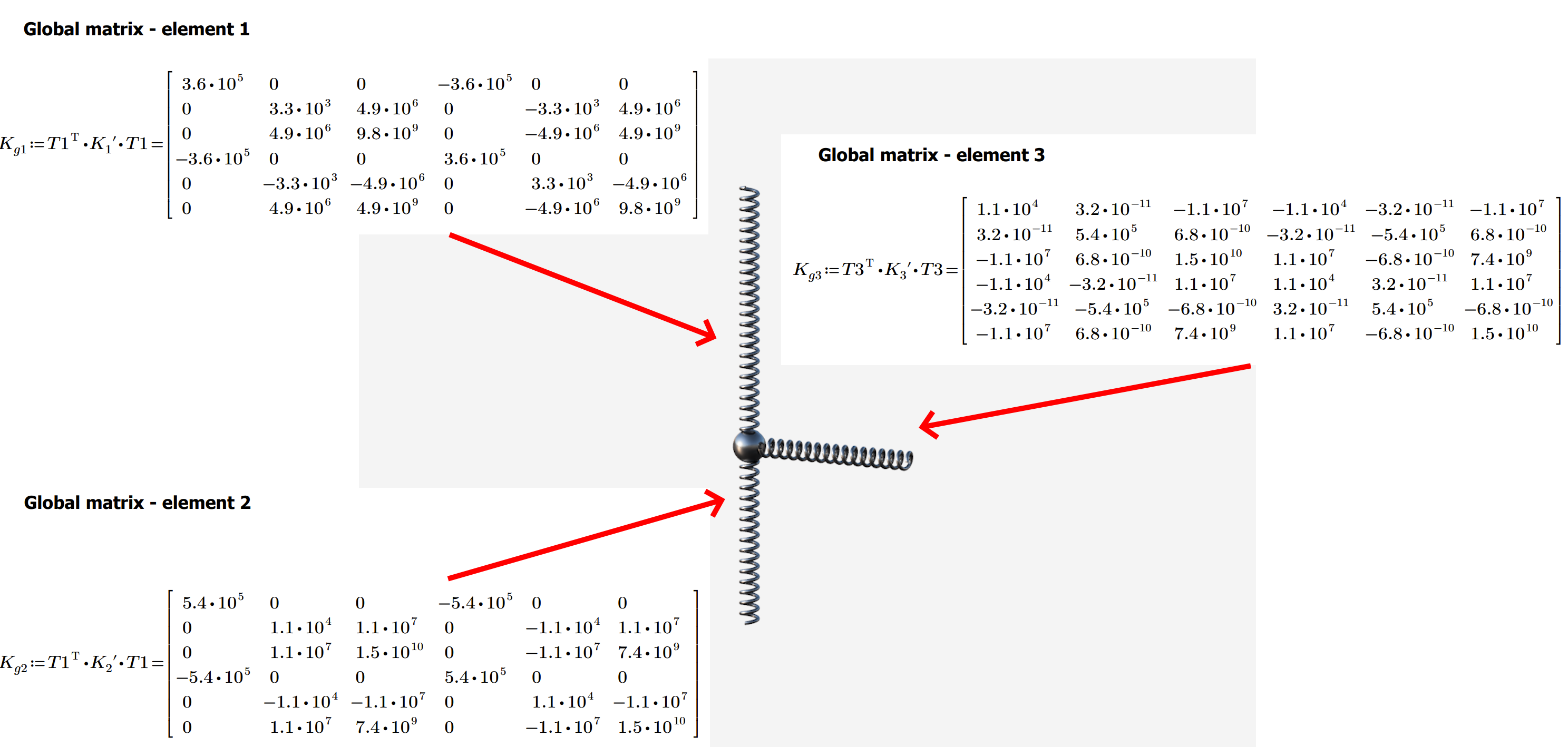
04) Matrice globale élément 1,2 ; Matrice globale élément 3
Matrice globale - sommation
Vous disposez de quatre nœuds, et chaque nœud possède trois degrés de liberté. Cela signifie que la matrice résultante a des dimensions de 12x12. La partie cruciale du processus consiste à additionner les valeurs des colonnes et des lignes des matrices individuelles dans la matrice globale.
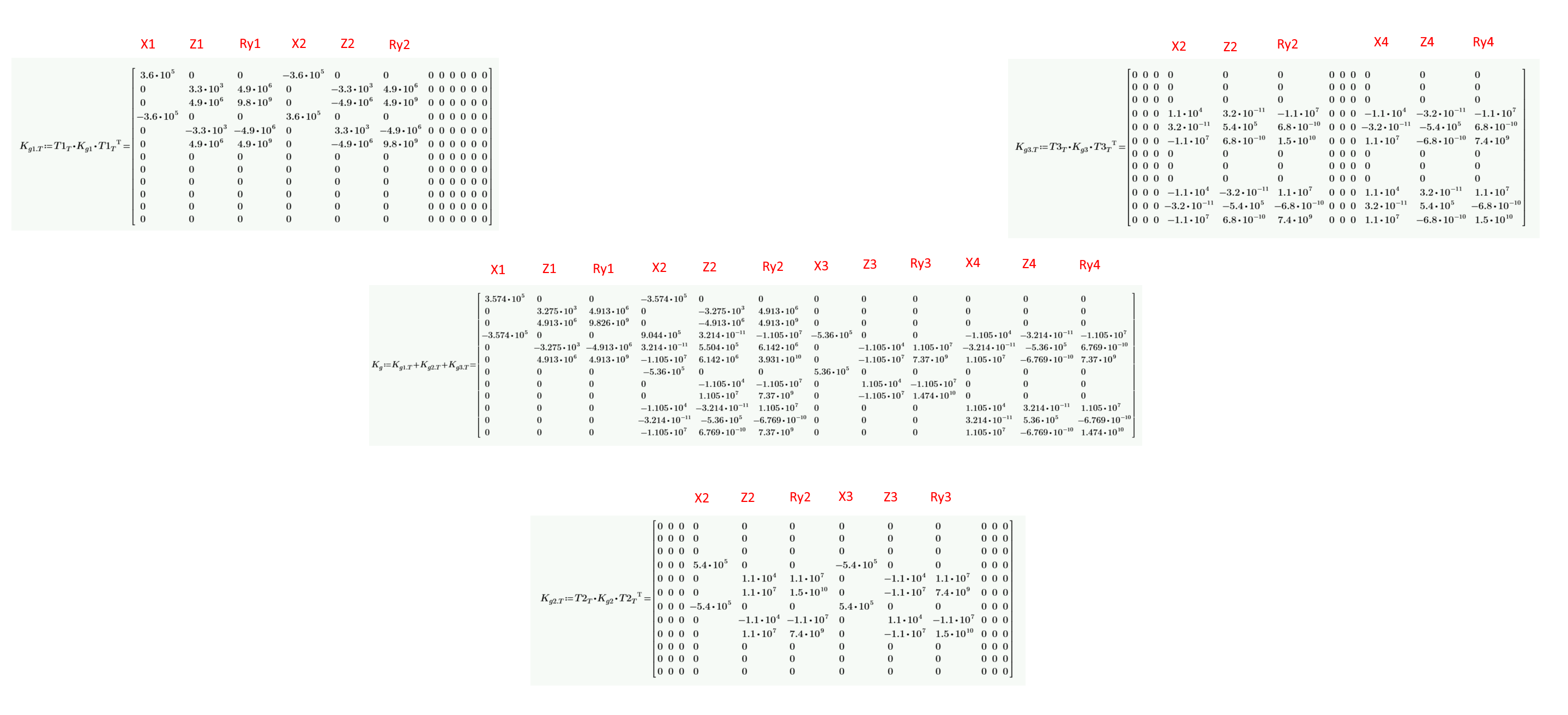
05) Matrice de rigidité globale de l'ensemble du système
Conditions aux limites et vecteur de charge
Sans conditions aux limites, le système est sous-déterminé (et seule la solution triviale peut être obtenue). Dans ce scénario, des appuis encastrés sont considérés aux nœuds un et trois. Les déplacements (et rotations) nuls aux limites peuvent être représentés en supprimant les lignes et colonnes correspondantes. La solution est triviale si aucune force n'est appliquée (déplacements nuls). Dans notre exemple, le nœud quatre est soumis à une force verticale de 50 kN.

06) Matrice réduite, vecteur de charge et conditions aux limites appliquées
Solution
En tenant compte des petites déformations et d'un matériau élastique linéaire, nous pouvons résoudre sans difficulté le vecteur des déplacements inconnus en une seule étape. Cette approche est rapide et très efficace, ce qui en fait une méthode pratique pour traiter les problèmes liés aux déplacements.
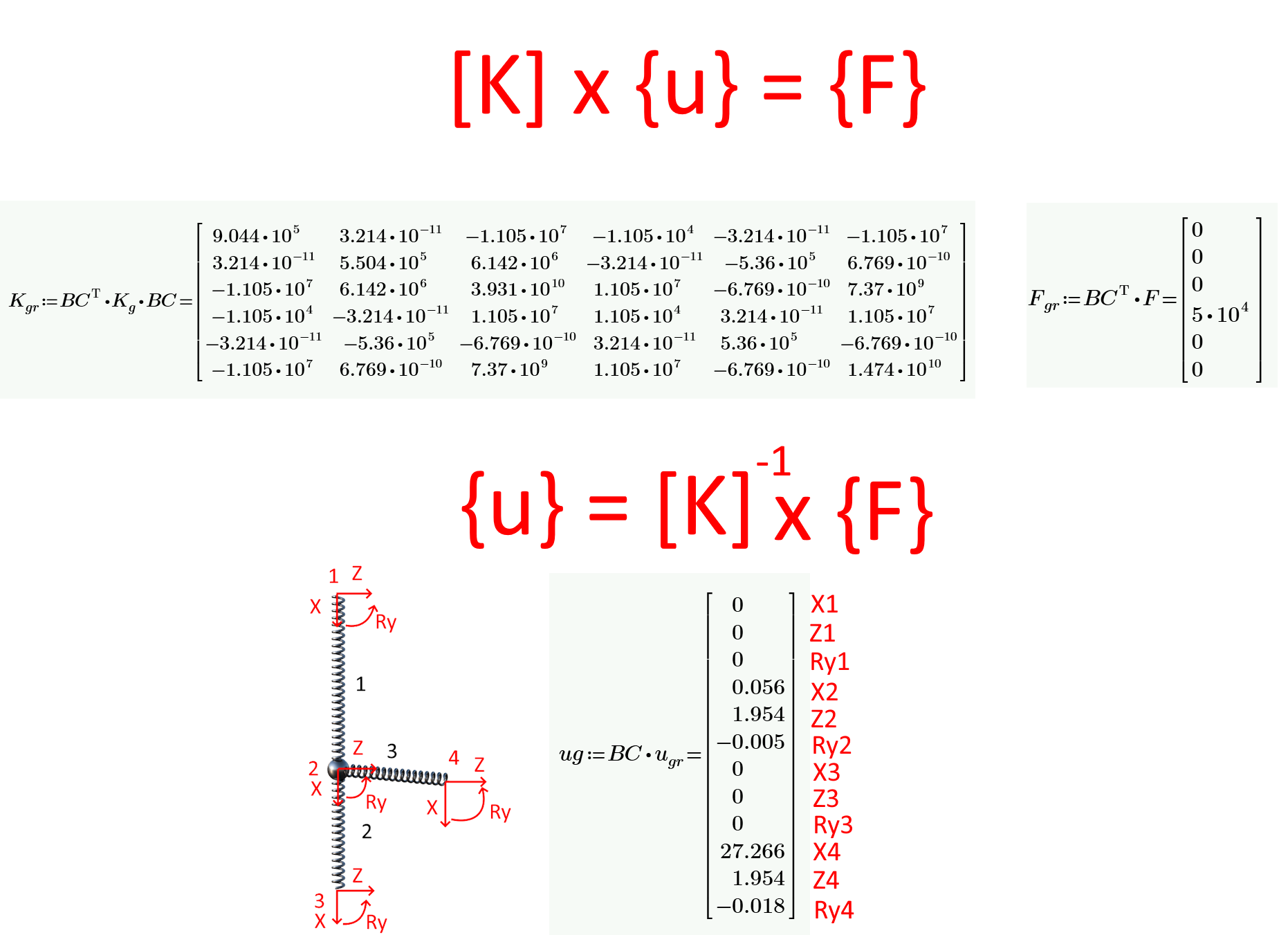
07) Déplacement nodal dans le SCG
Vérification par AEF
Étant donné que les valeurs fournies pour les nœuds sont précises, il est impératif que les résultats de l'analyse par éléments finis (AEF) correspondent exactement à ceux de l'approche de rigidité directe (ARD). Cette exigence garantit que les résultats analytiques sont cohérents avec le comportement réel du système étudié. Il est donc crucial de s'assurer que les résultats de l'AEF et de l'ARD concordent dans les limites du niveau de tolérance acceptable.
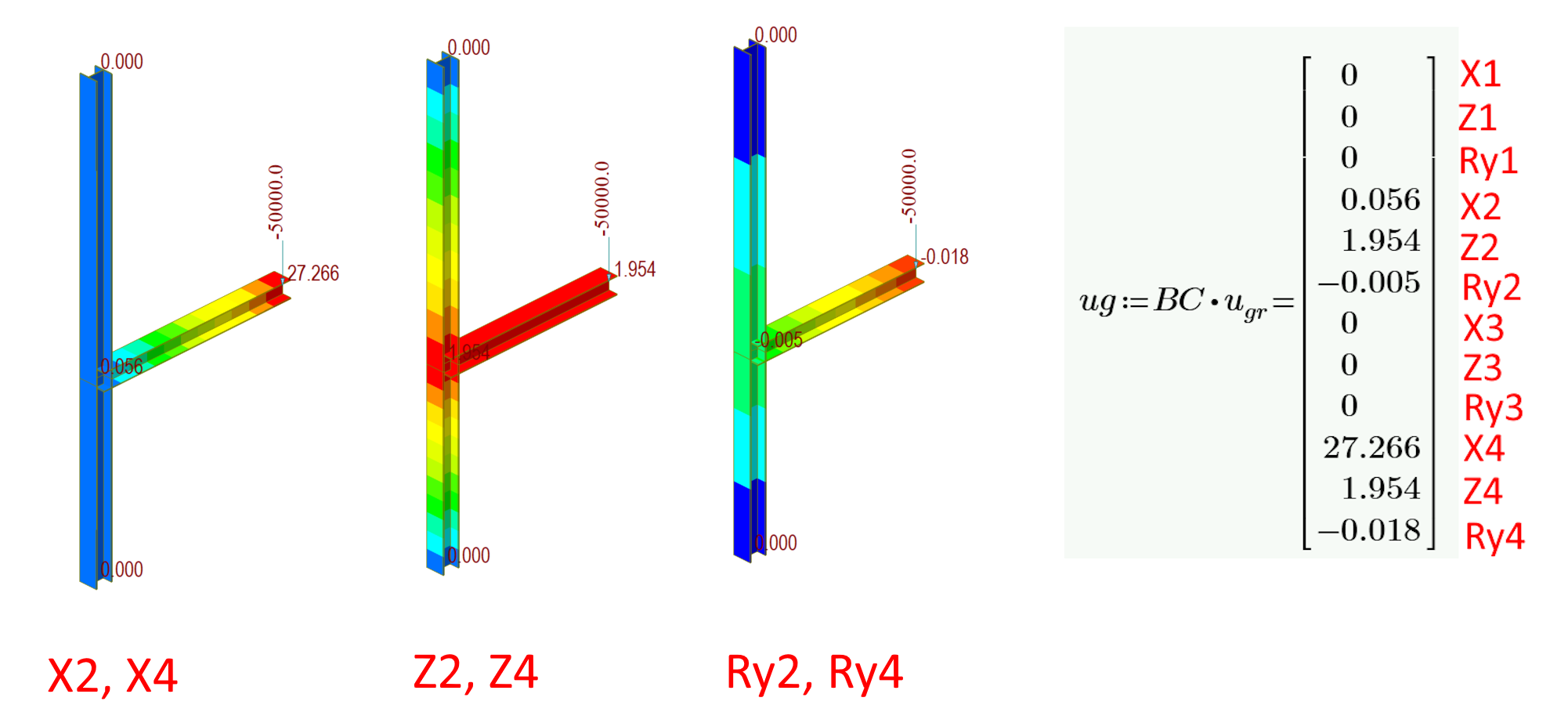
08) Vérification et comparaison des déplacements nodaux entre l'ARD et l'AEF
Approche de rigidité directe – assemblages semi-rigides
Il est essentiel de comprendre que les assemblages sont généralement semi-rigides et non entièrement rigides ou articulés. Négliger la rigidité d'un assemblage pourrait entraîner un comportement de la structure dans le modèle différent de celui de la structure réelle. Voyons comment la rigidité est prise en compte dans les calculs et comment elle influence le comportement de la structure elle-même.
Ressort en rotation et structures de génie civil
Les structures en acier de génie civil, telles que les halles et les portiques, sont conçues pour résister efficacement aux charges de flexion transmises par les poutres. Lorsque la poutre est chargée et que la structure est hyperstatique, la rigidité en rotation de l'assemblage joue un rôle crucial pour assurer une redistribution correcte des charges et une déformation précise. C'est pourquoi il est important de maintenir l'intégrité structurelle de l'assemblage afin d'éviter tout dommage potentiel à la structure.
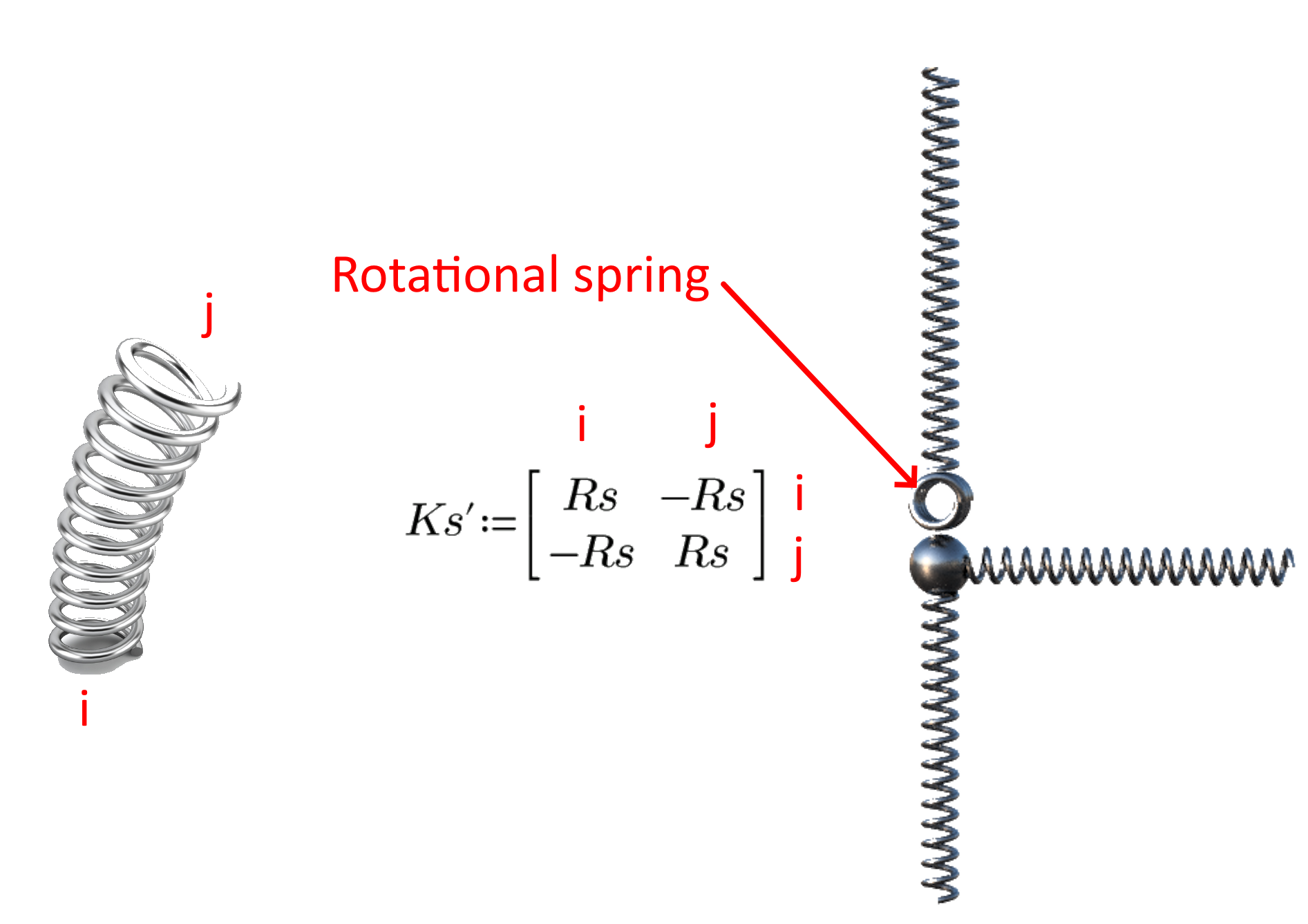
09) Ressort en rotation - matrice locale
Pour assurer la compatibilité dans un assemblage, il est important de coupler les déformations. Ce couplage doit être inclus dans la matrice de rigidité globale pour calculer les déformations. Lorsque la rigidité en rotation est appliquée, d'autres degrés de liberté doivent être inclus sous forme d'une ligne et d'une colonne supplémentaires dans la matrice de rigidité globale. La matrice finale pour ce type d'assemblage aura une dimension de 13x13, tandis qu'une matrice d'assemblage rigide aura une dimension de 12x12.
Impact de la rigidité en rotation
La rigidité en rotation d'une structure a un impact significatif sur la distribution des forces et l'apparition des déformations. Cela signifie qu'une structure avec rigidité en rotation se comportera différemment d'une structure avec des assemblages rigides ou articulés. Si la rigidité est augmentée de manière disproportionnée, cela peut entraîner des modifications supplémentaires du comportement de la structure. Dans ce scénario, nous allons explorer les effets d'une rigidité en rotation accrue. Le modèle utilisé est celui du chapitre précédent, et le ressort en rotation est attaché à l'extrémité (j) de l'élément un.
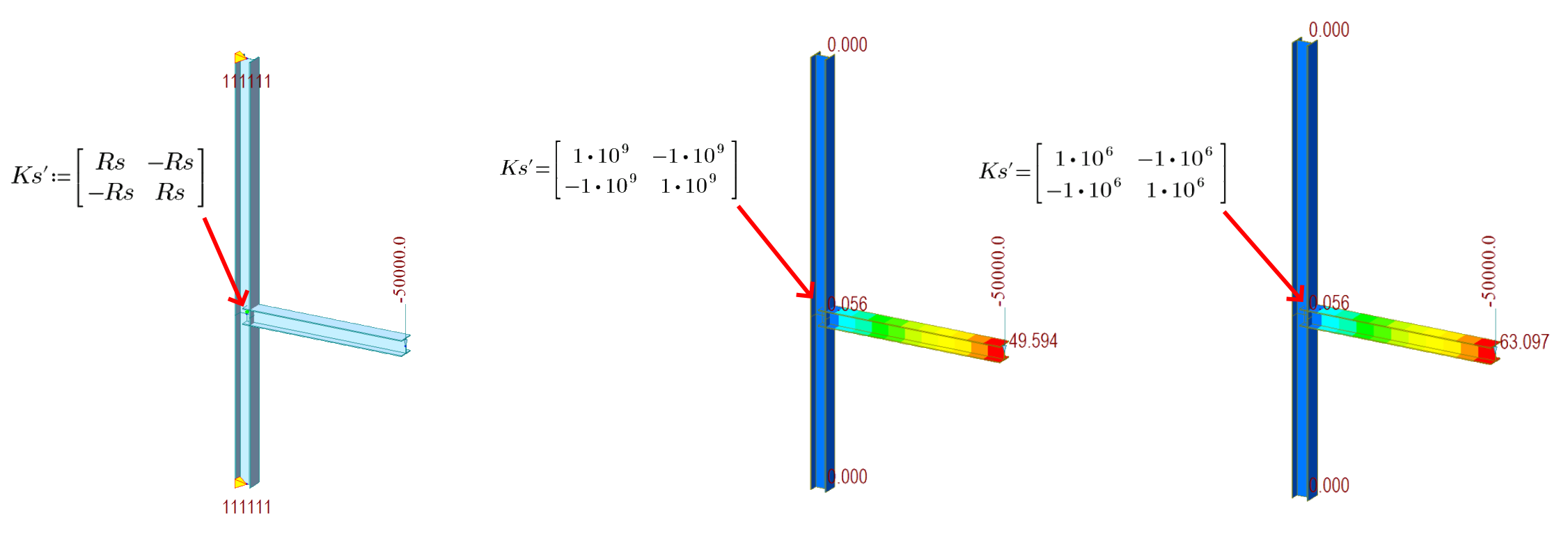
10) Déformations pour différentes rigidités en rotation
Le graphique indique que, dans certaines plages de rigidité, la déformation évolue de manière multilinéaire pour un assemblage semi-rigide. Pour les assemblages semi-rigides, sous-estimer ou surestimer la rigidité entraîne des différences significatives dans les flèches et la redistribution des efforts internes.
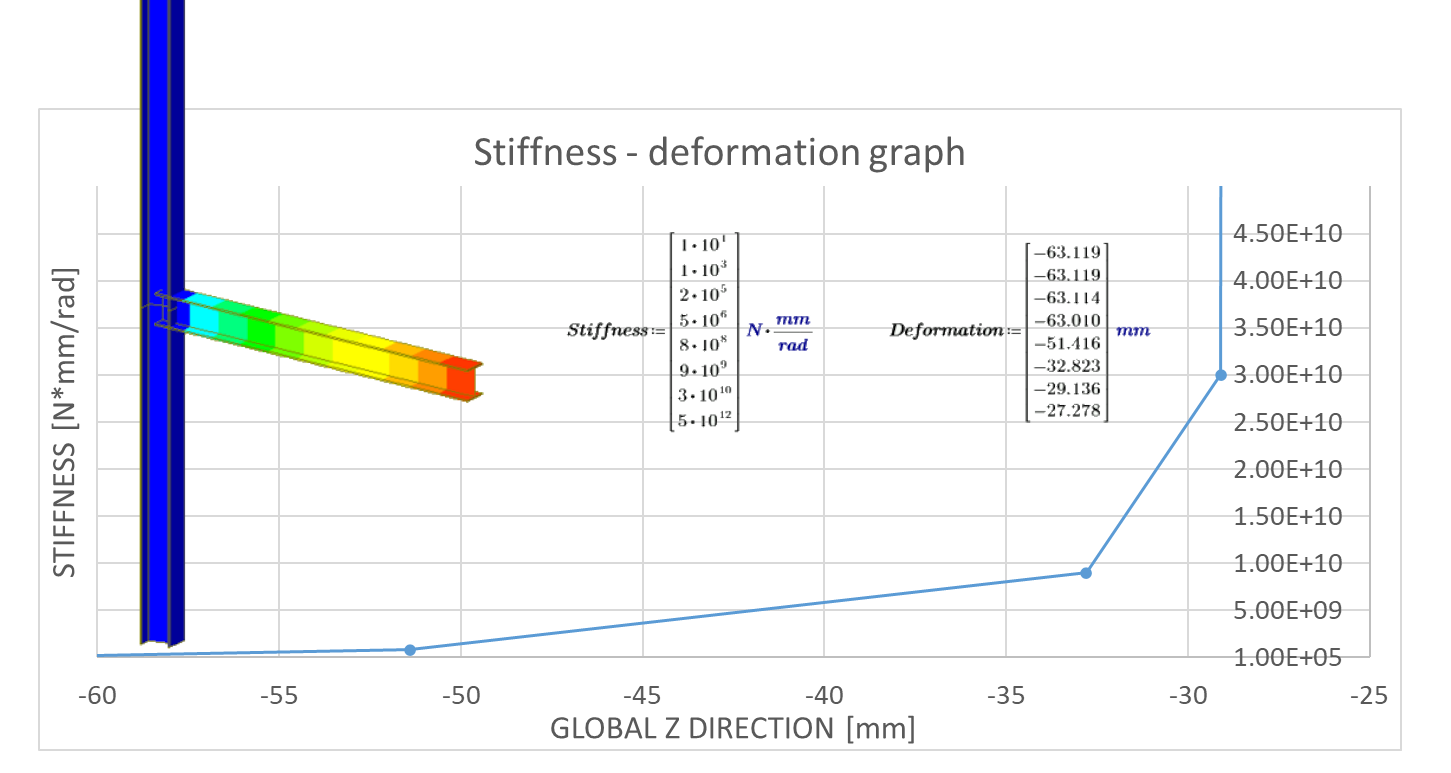
11) Graphique rigidité – déformation
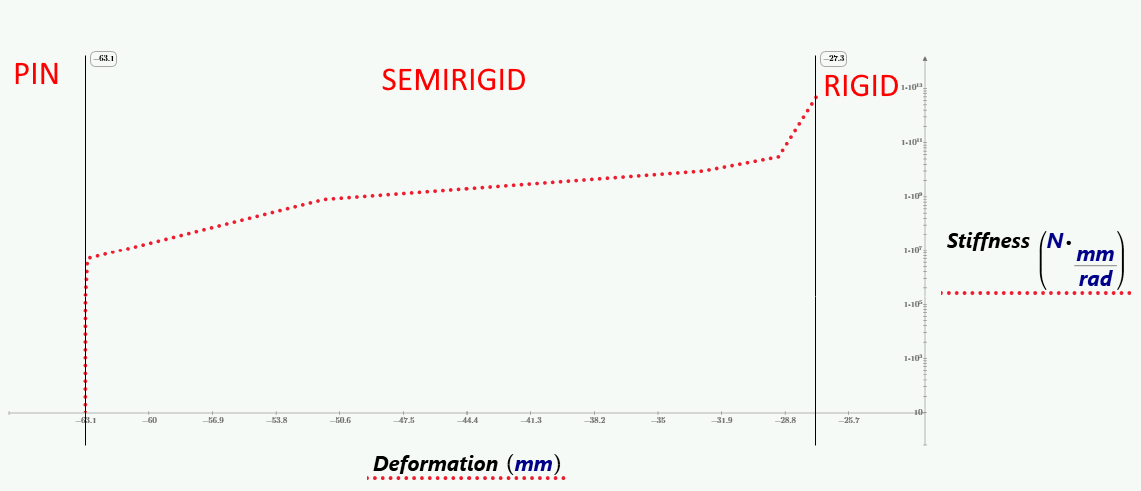
12) Zone de rigidité pour les assemblages
Conclusion et sujets à venir
Pour garantir le succès de notre étude à venir, vous devez d'abord acquérir une compréhension approfondie du problème en question. Ce n'est qu'alors que vous pourrez avancer avec confiance et détermination. Notre étude est consacrée à l'exploration d'une série de sujets importants pertinents pour la question que nous examinons. Grâce à une recherche et une analyse rigoureuses, nous espérons apporter un nouvel éclairage sur ce problème complexe et difficile, et contribuer ainsi à une meilleure compréhension de ce domaine d'étude important.
- Comment la rigidité en rotation est calculée dans IDEA StatiCa
- Comment utiliser la rigidité pour plusieurs éléments dans un outil AEF
- Vérification de la rigidité en rotation entre IDEA StatiCa et ABAQUS pour un assemblage platine à platine
Essayez IDEA StatiCa gratuitement

