Abordagem de rigidez direta
Motivação
Ter uma compreensão profunda da Análise por Elementos Finitos (AEF) é fundamental tanto para garantir entradas precisas como para apresentar os resultados de forma adequada. O principal objetivo deste artigo é explicar como a matriz é assemblada em segundo plano em qualquer software de AEF e como a rigidez rotacional pode influenciar o comportamento global de uma estrutura. Este artigo serve de pré-requisito para um artigo futuro, onde todas as conclusões serão aplicadas a uma estrutura utilizando o IDEA StatiCa Connection.
A abordagem de rigidez direta – ligações rígidas
Vejamos o exemplo simples de uma estrutura apresentada na figura 1. A estrutura é composta por um pilar e uma viga com propriedades de secção transversal idênticas HEA 200. Cada nó tem três graus de liberdade, incluindo duas translações (X e Z) e uma rotação (Ry). O espaço de trabalho é 2D. O material é aço com um módulo de elasticidade de 200 000 MPa.
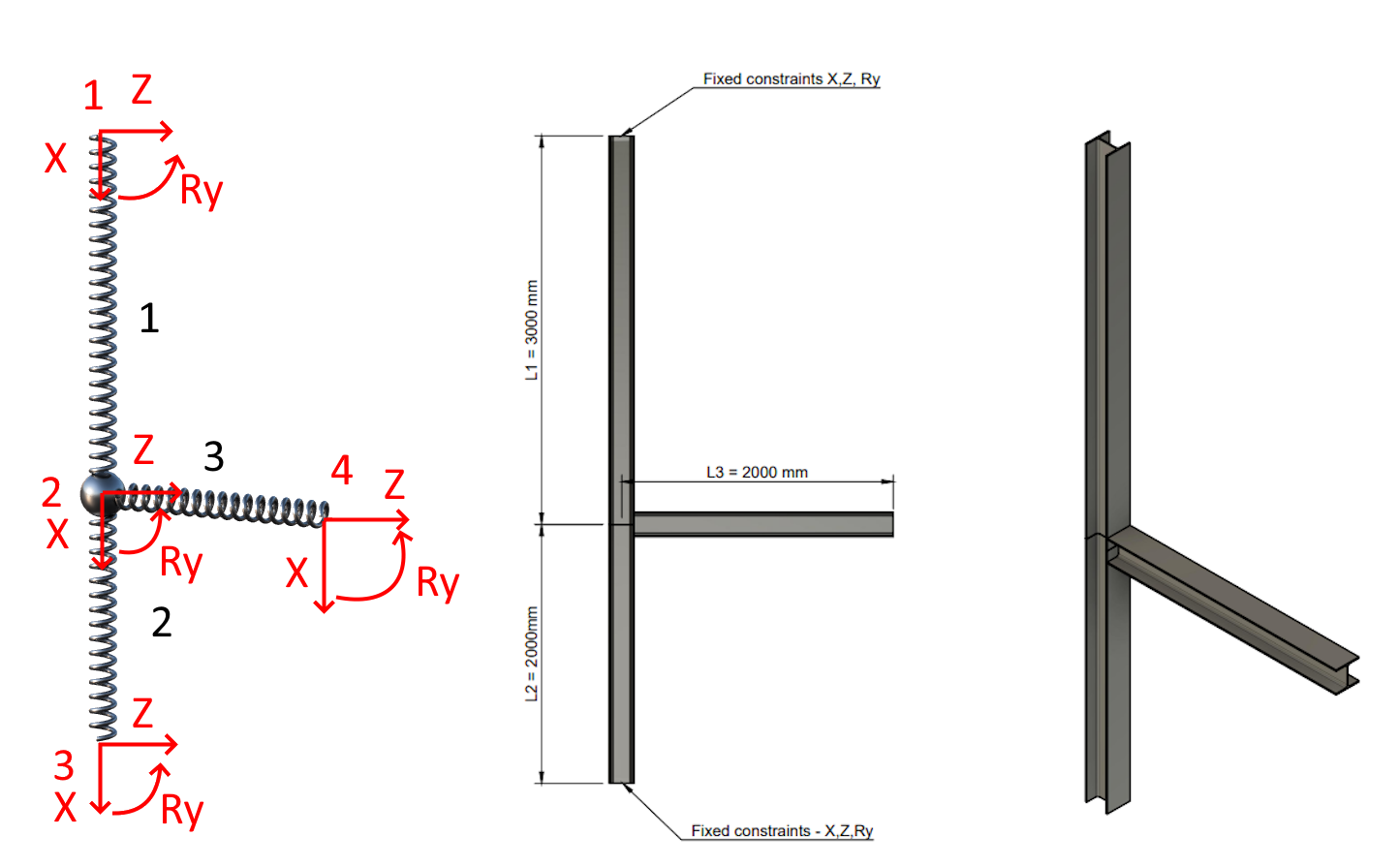
01) Modelo de mola – SCG, geometria, axonometria + secções HEA 200
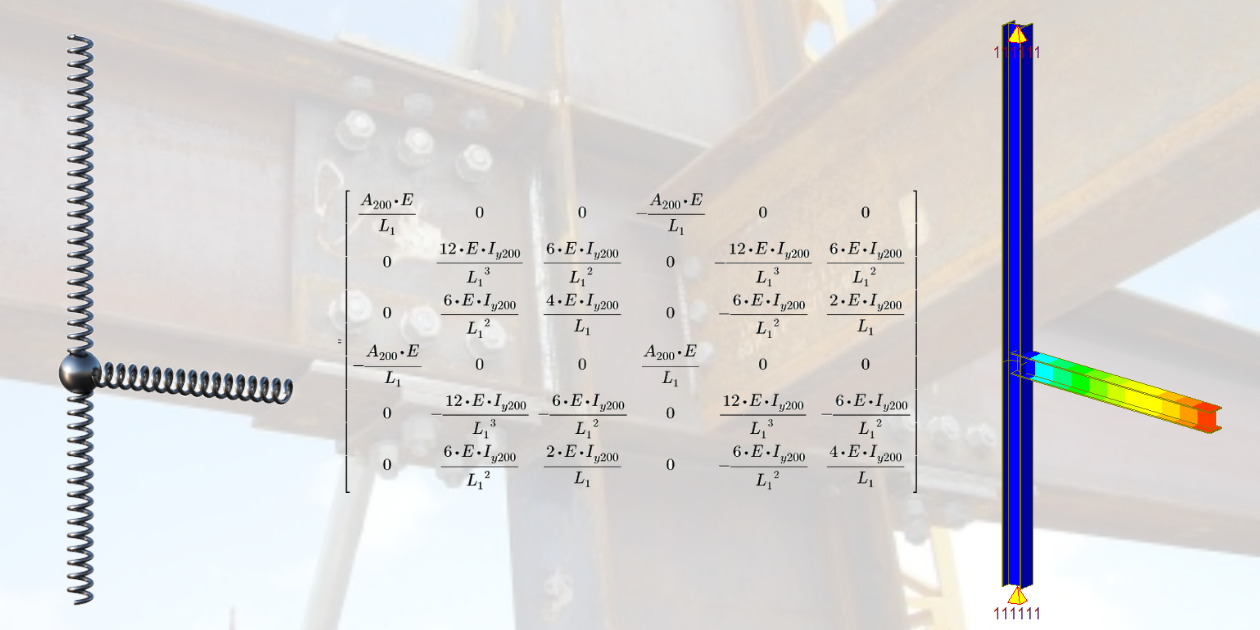
Matriz de rigidez local
A matriz de rigidez governa a relação entre a variação dos deslocamentos (e rotações) nas extremidades da viga e as forças correspondentes (reações). Vale a pena notar que cada nó no espaço de trabalho 2D tem três graus de liberdade (duas translações e uma rotação), resultando numa matriz local com dimensões 6x6. Esta matriz representa a rigidez normal, a rigidez ao corte e a rigidez à flexão do elemento.
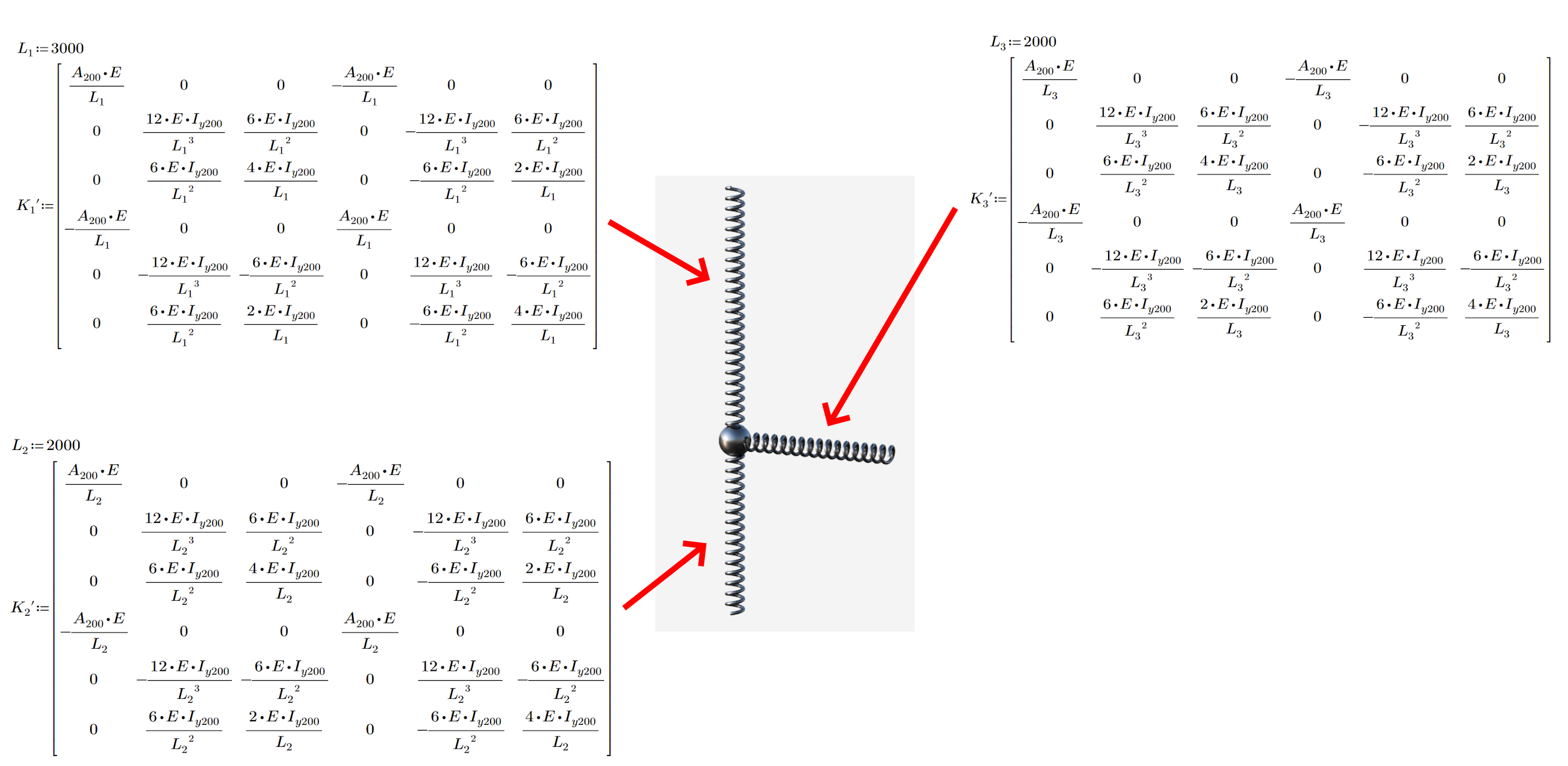
02) Matriz de rigidez local de todos os elementos
Matriz de transformação
Em 90% das estruturas, a matriz de rigidez local dos elementos não está alinhada com o sistema de coordenadas global. Apenas vigas simples alinhadas em linha reta têm o mesmo Sistema de Coordenadas Local (SCL) e Sistema de Coordenadas Global (SCG). No nosso caso, o terceiro elemento está rodado 90 graus em torno do nó dois. Esta transformação é necessária para os cálculos seguintes.

03) Matriz de transformação do elemento 1,2; Matriz de transformação do elemento 3
Transformação para um sistema de coordenadas global
Para um cálculo preciso dos deslocamentos, é essencial alinhar os sistemas de coordenadas de todos os elementos envolvidos. Uma forma de o conseguir é utilizar uma matriz de transformação, que simplifica o processo e permite uma transição suave para o cálculo dos deslocamentos. A transformação não modifica a matriz para os elementos um e dois, uma vez que o seu sistema de coordenadas local é igual ao global. No entanto, é possível observar uma alteração no elemento três, que está rodado cerca de 90 graus. As entradas para as translações X e Z são. Poderá notar os pequenos valores não nulos na matriz. Estes resultam do processo numérico, mas como são relativamente pequenos em relação à rigidez global, não afetam os resultados de forma significativa.
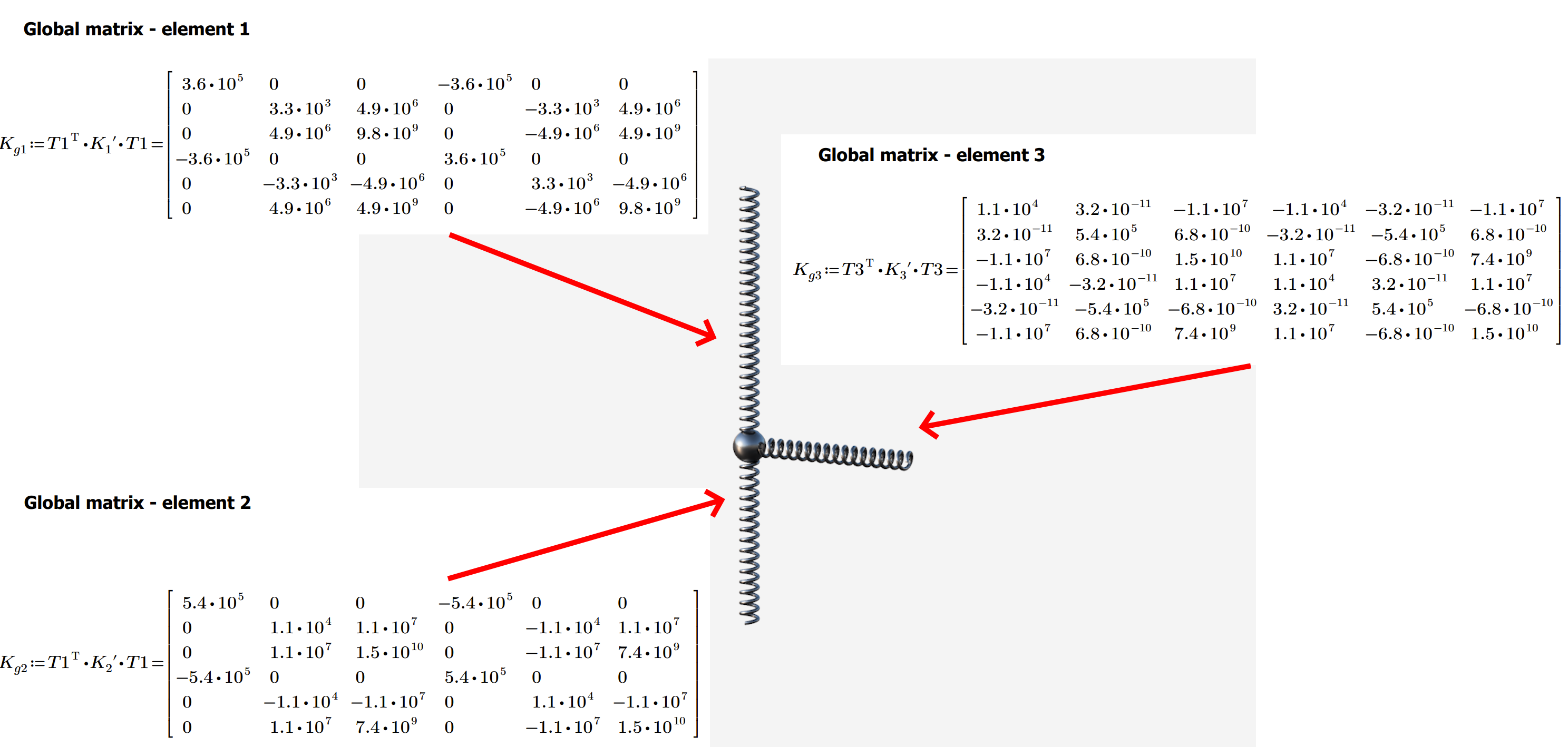
04) Matriz global do elemento 1,2; Matriz global do elemento 3
Matriz global – somatório
Existem quatro nós e cada nó tem três graus de liberdade. Isto significa que a matriz resultante tem dimensões 12x12. A parte crucial do processo consiste em somar os valores nas colunas e linhas das matrizes individuais na matriz global.
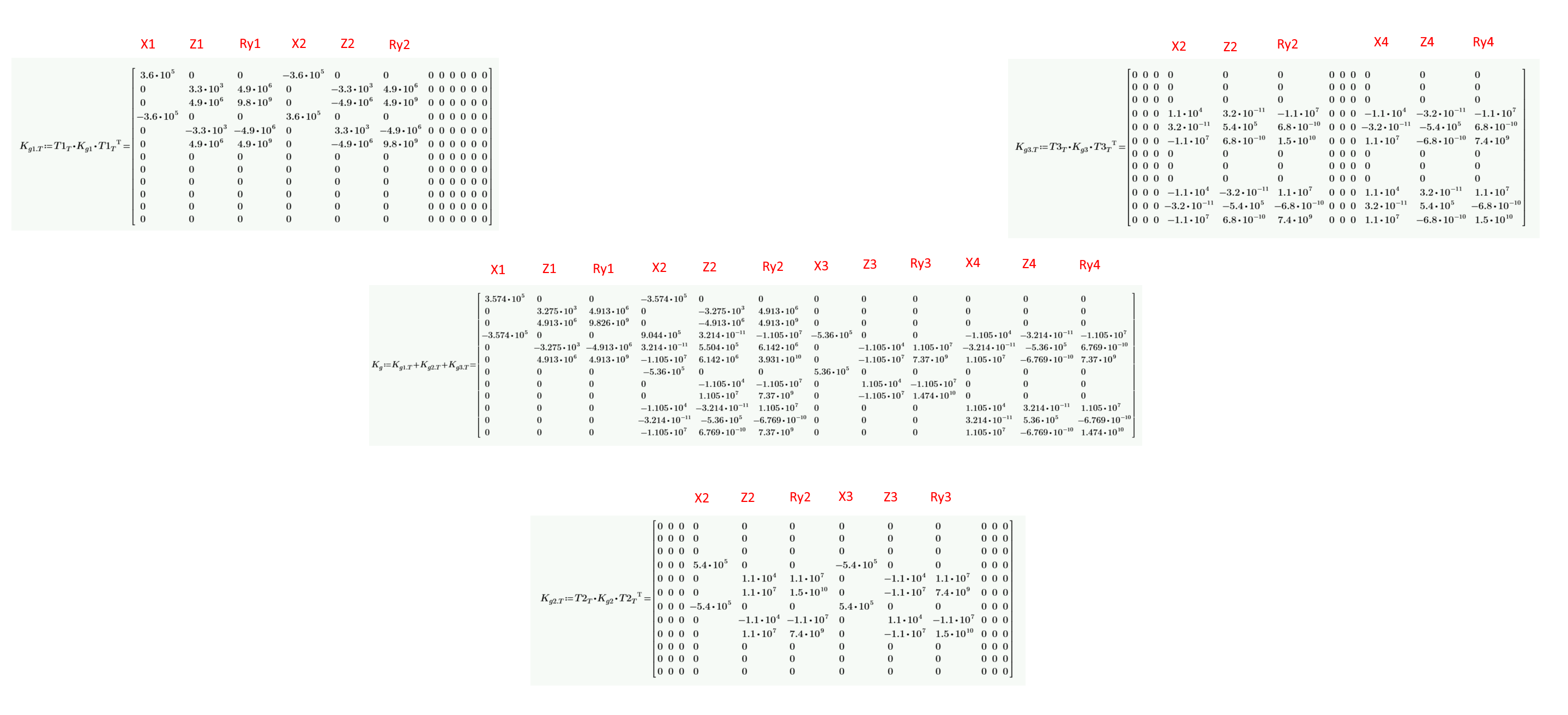
05) Matriz de rigidez global de todo o sistema
Condições de fronteira e vetor de cargas
Sem condições de fronteira, o sistema é indeterminado (e apenas a solução trivial pode ser obtida). Neste cenário, consideram-se restrições de encastramento nos nós um e três. Os deslocamentos (e rotações) nulos nas fronteiras podem ser representados pela eliminação das linhas e colunas correspondentes. A solução é trivial se não forem aplicadas forças (deslocamentos nulos). No nosso exemplo, o nó quatro está sujeito a uma força vertical de 50 kN.

06) Matriz reduzida, vetor de cargas e condições de fronteira aplicadas
Solução
Tendo em conta pequenas deformações e material com comportamento linearmente elástico, é possível resolver de forma simples o vetor dos deslocamentos desconhecidos num único passo. Esta abordagem é rápida e altamente eficaz, tornando-se um método conveniente para tratar questões relacionadas com deslocamentos.
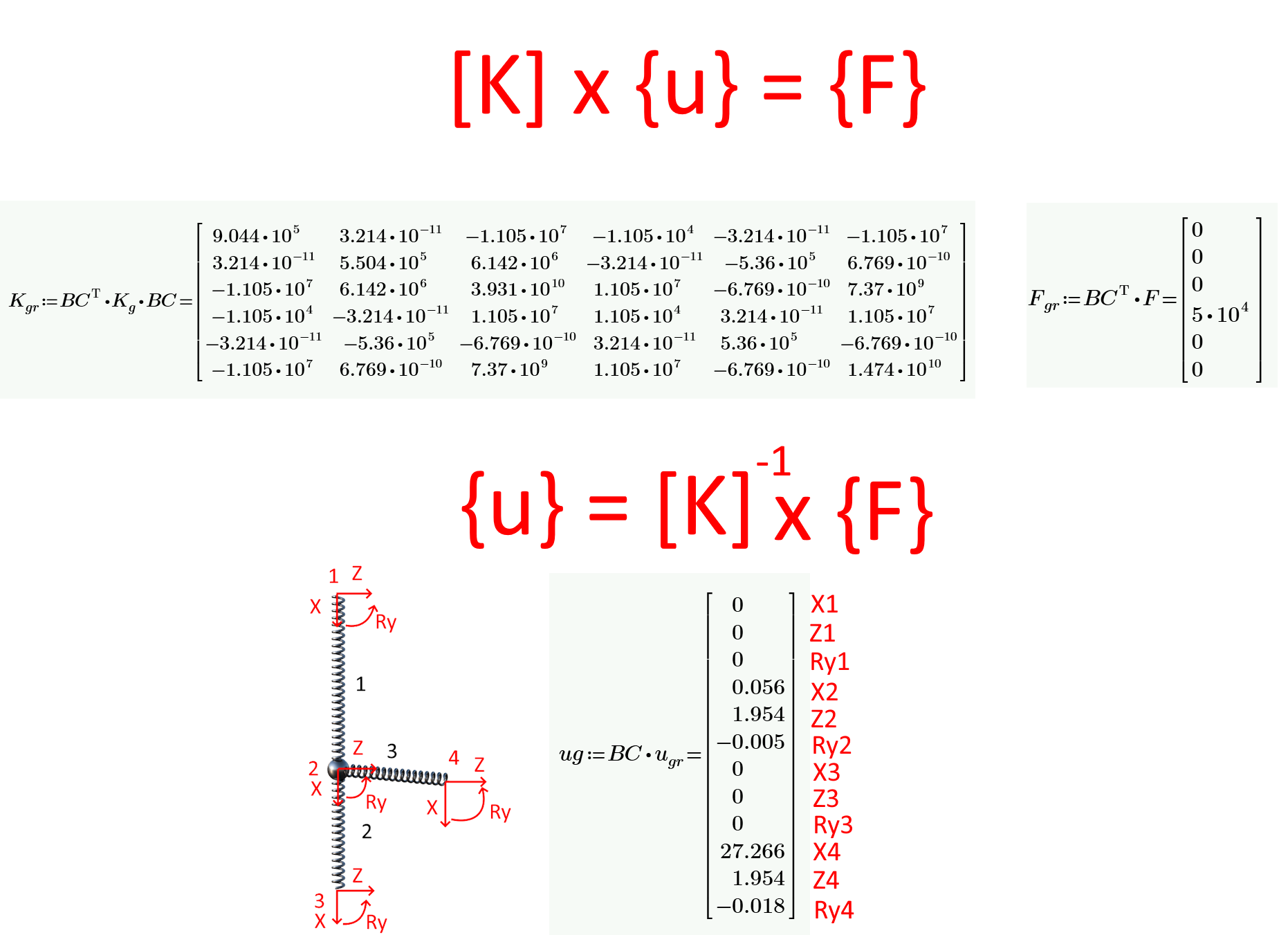
07) Deslocamento nodal no SCG
Verificação por AEF
Dado que os valores fornecidos para os nós são precisos, é imperativo que os resultados da análise por elementos finitos (AEF) correspondam exatamente aos da abordagem de rigidez direta (ARD). Este requisito garante que os resultados analíticos são consistentes com o comportamento real do sistema em estudo. Por isso, é fundamental assegurar que os resultados da AEF e da ARD coincidam dentro do nível de tolerância aceitável.
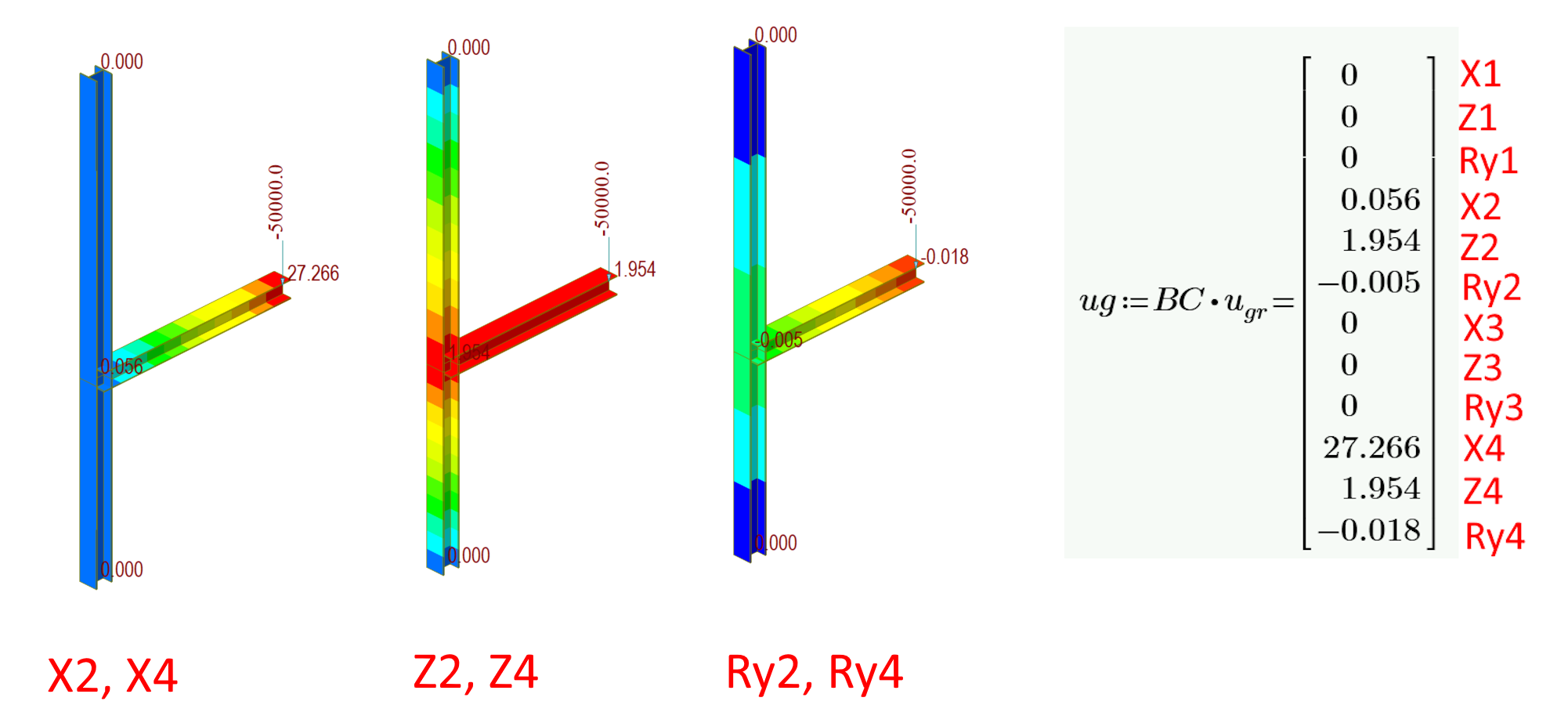
08) Verificação e comparação do deslocamento nodal entre a ARD e a AEF
Abordagem de rigidez direta – ligações semi-rígidas
É fundamental compreender que as ligações são tipicamente semi-rígidas e não totalmente rígidas ou articuladas. Negligenciar a rigidez de uma ligação pode resultar num comportamento da estrutura no modelo diferente do da estrutura real. Vejamos como a rigidez é tida em conta nos cálculos e como influencia o comportamento da própria estrutura.
Mola rotacional e estruturas de engenharia civil
As estruturas de aço de engenharia civil, como pavilhões e pórticos, são projetadas para resistir eficientemente a cargas de flexão transferidas pelas vigas. Quando a viga está carregada e a estrutura é hiperestática, a rigidez rotacional da junta desempenha um papel fundamental para garantir uma redistribuição correta das cargas e uma deformação precisa. Por isso, é importante manter a integridade estrutural da junta para evitar potenciais danos na estrutura.
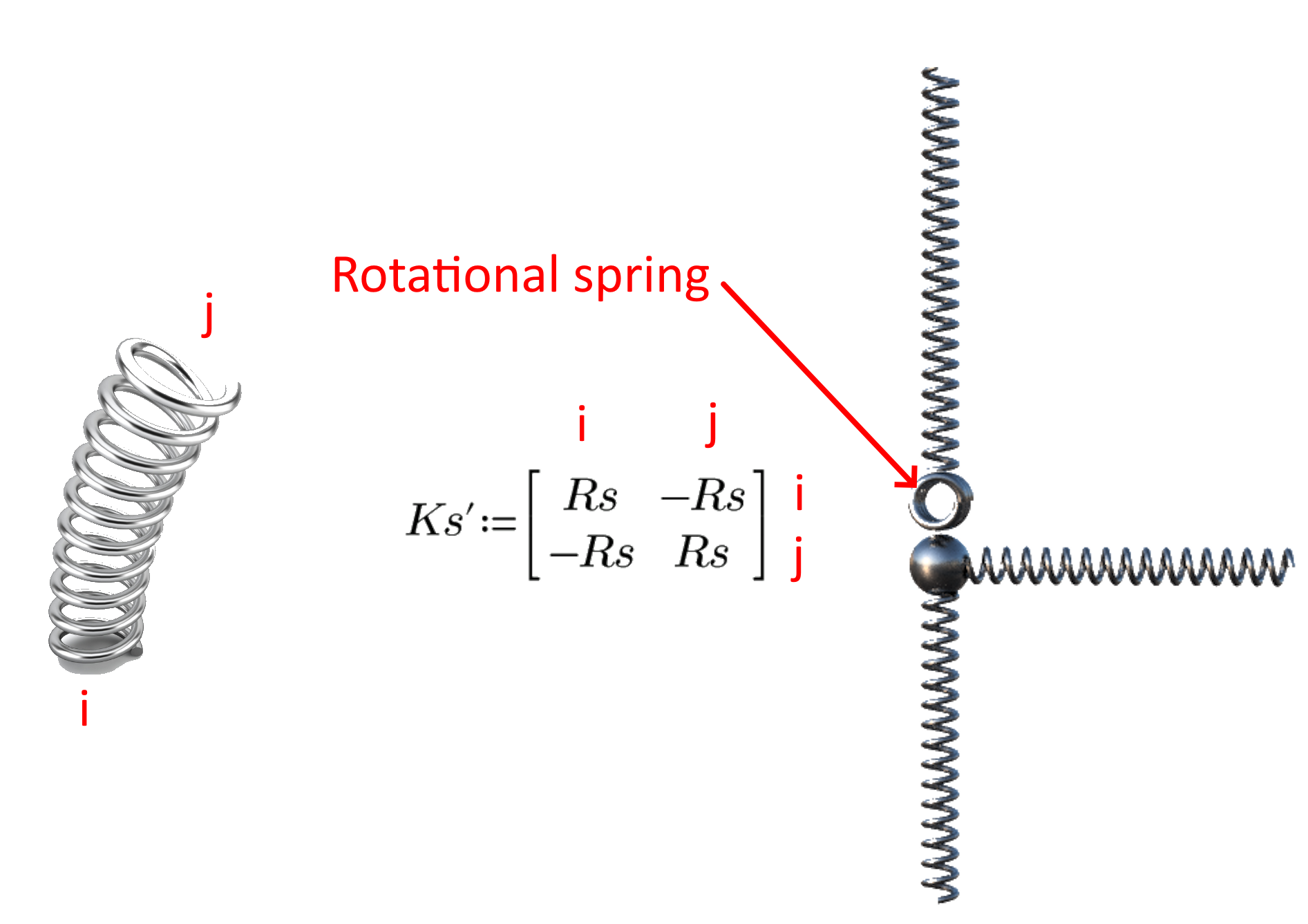
09) Mola rotacional – matriz local
Para garantir a compatibilidade numa junta, é importante acoplar as deformações. Este acoplamento deve ser incluído na matriz de rigidez global para calcular as deformações. Quando é aplicada rigidez rotacional, outros graus de liberdade devem ser incluídos como uma linha e coluna adicionais na matriz de rigidez global. A matriz final para este tipo de junta terá uma dimensão de 13x13, enquanto uma matriz de ligação rígida terá uma dimensão de 12x12.
Impacto da rigidez rotacional
A rigidez rotacional de uma estrutura tem um impacto significativo na forma como as forças são distribuídas e as deformações ocorrem. Isto significa que uma estrutura com rigidez rotacional se comportará de forma diferente de uma estrutura com ligações rígidas ou articuladas. Se a rigidez for aumentada de forma desproporcionada, pode conduzir a alterações adicionais no comportamento da estrutura. Neste cenário, exploraremos os efeitos do aumento da rigidez rotacional. O modelo com que trabalhamos é do capítulo anterior, e a mola rotacional está ligada à extremidade (j) do elemento um.
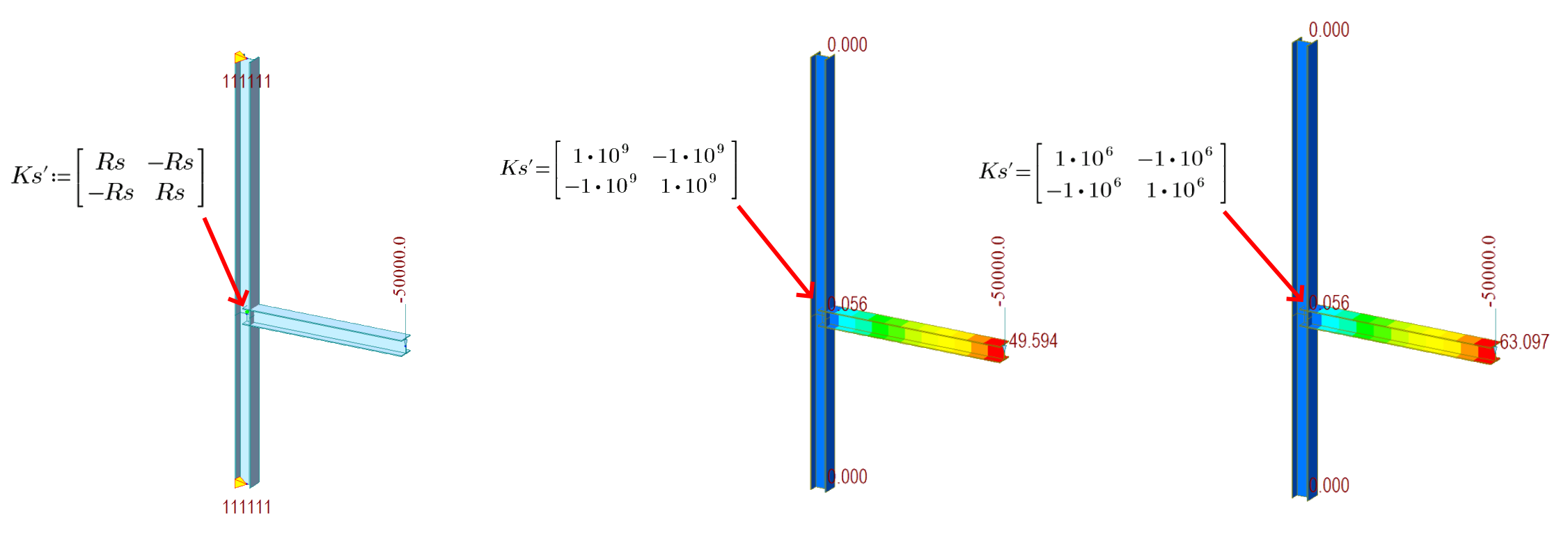
10) Deformações para diferentes rigidezes rotacionais
O gráfico indica que, em determinadas gamas de rigidez, a deformação varia de forma multilinear para uma ligação semi-rígida. Para ligações semi-rígidas, subestimar ou sobrestimar a rigidez conduz a diferenças significativas nas flechas e na redistribuição dos esforços internos.
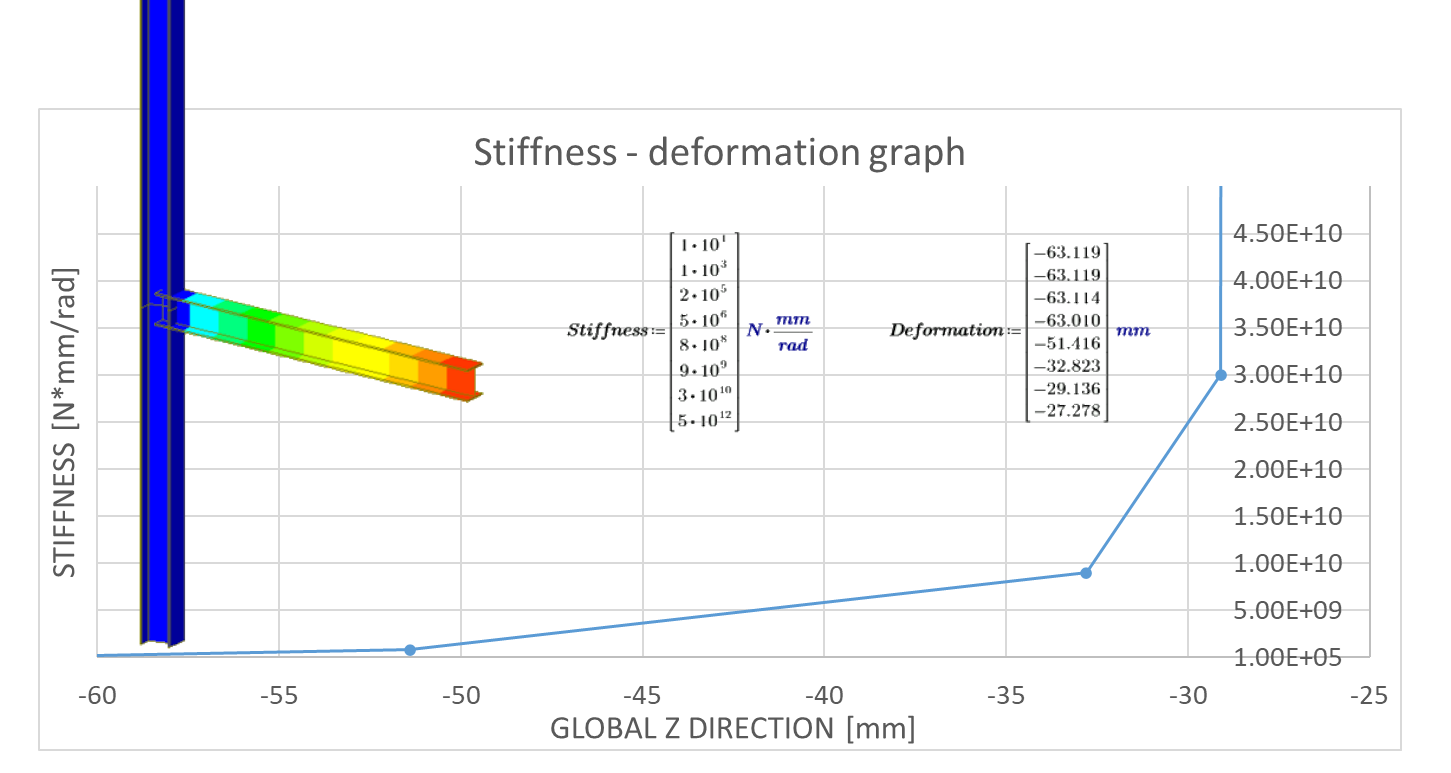
11) Gráfico rigidez – deformação
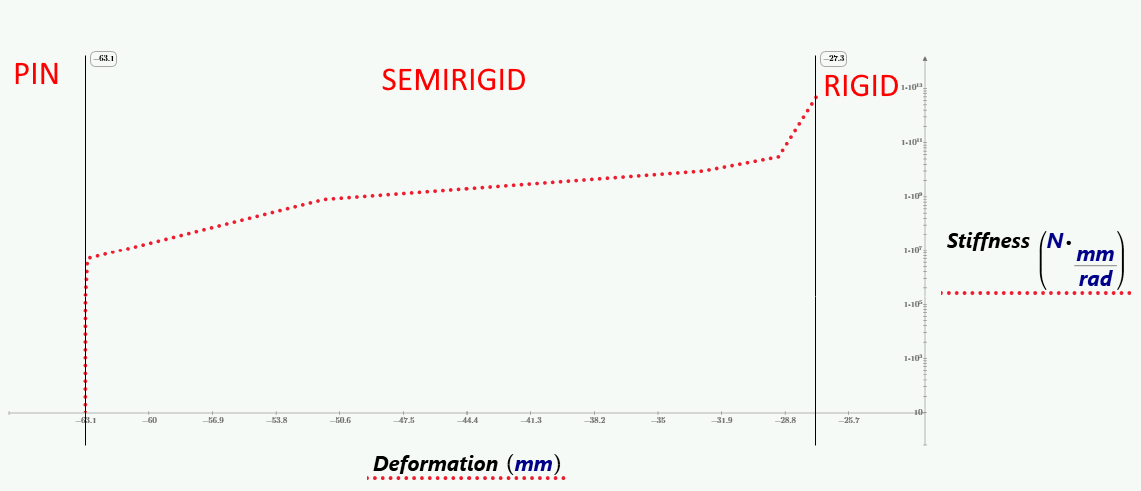
12) Zona de rigidez para ligações
Conclusão e tópicos futuros
Para garantir o sucesso do nosso estudo futuro, é necessário primeiro adquirir uma compreensão profunda do problema em questão. Só então será possível avançar com confiança e propósito. O nosso estudo dedica-se à exploração de um conjunto de tópicos importantes relevantes para a questão que estamos a investigar. Através de uma investigação e análise cuidadosas, esperamos lançar nova luz sobre este problema complexo e desafiante, e contribuir, em última análise, para uma melhor compreensão desta importante área de estudo.
- Como é calculada a rigidez rotacional no IDEA StatiCa
- Como utilizar a rigidez para múltiplos elementos numa ferramenta de AEF
- Verificação da rigidez rotacional entre o IDEA StatiCa e o ABAQUS para uma ligação placa a placa
Experimente o IDEA StatiCa gratuitamente

