Direktes Steifigkeitsverfahren
Motivation
Ein tiefes Verständnis der Finite-Elemente-Analyse (FEA) ist entscheidend, um sowohl korrekte Eingaben sicherzustellen als auch die Ergebnisse richtig darzustellen. Das Hauptziel dieses Artikels ist es zu erklären, wie die Matrix im Hintergrund jeder FEA-Software zusammengestellt wird und wie die Rotationssteifigkeit das globale Verhalten einer Struktur beeinflussen kann. Dieser Artikel dient als Voraussetzung für einen bevorstehenden Artikel, in dem alle Erkenntnisse auf eine Struktur mit IDEA StatiCa Connection angewendet werden.
Das direkte Steifigkeitsverfahren – starre Verbindungen
Betrachten wir das einfache Beispiel einer Struktur, die in Abbildung 1 dargestellt ist. Die Struktur besteht aus einer Stütze und einem Träger mit identischen Querschnittseigenschaften HEA 200. Jeder Knoten hat drei Freiheitsgrade, darunter zwei Verschiebungen (X und Z) und eine Rotation (Ry). Der Arbeitsbereich ist 2D. Das Material ist Stahl mit einem Elastizitätsmodul von 200.000 MPa.
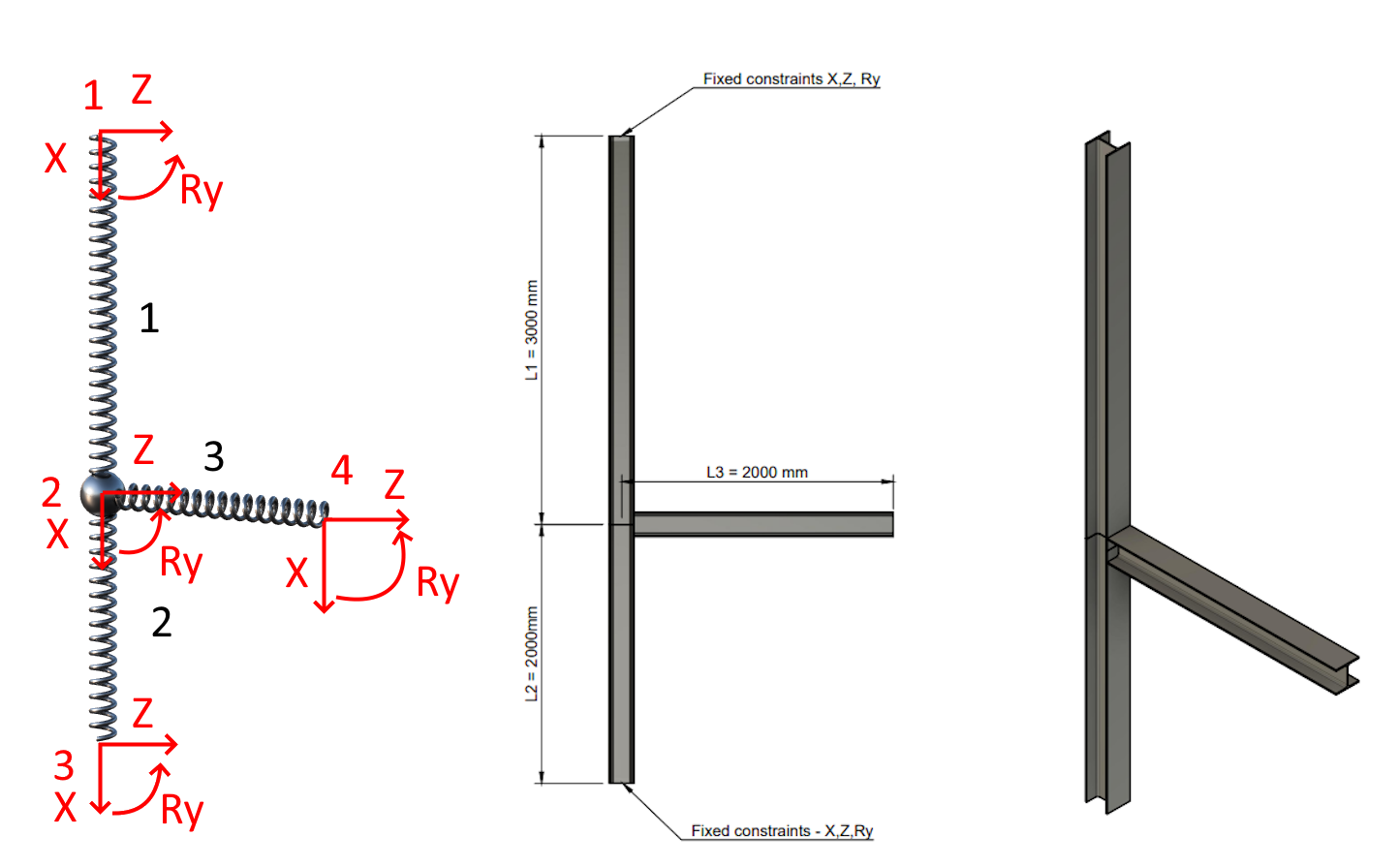
01) Federmodell-GKS, Geometrie, Axonometrie + Querschnitte HEA 200
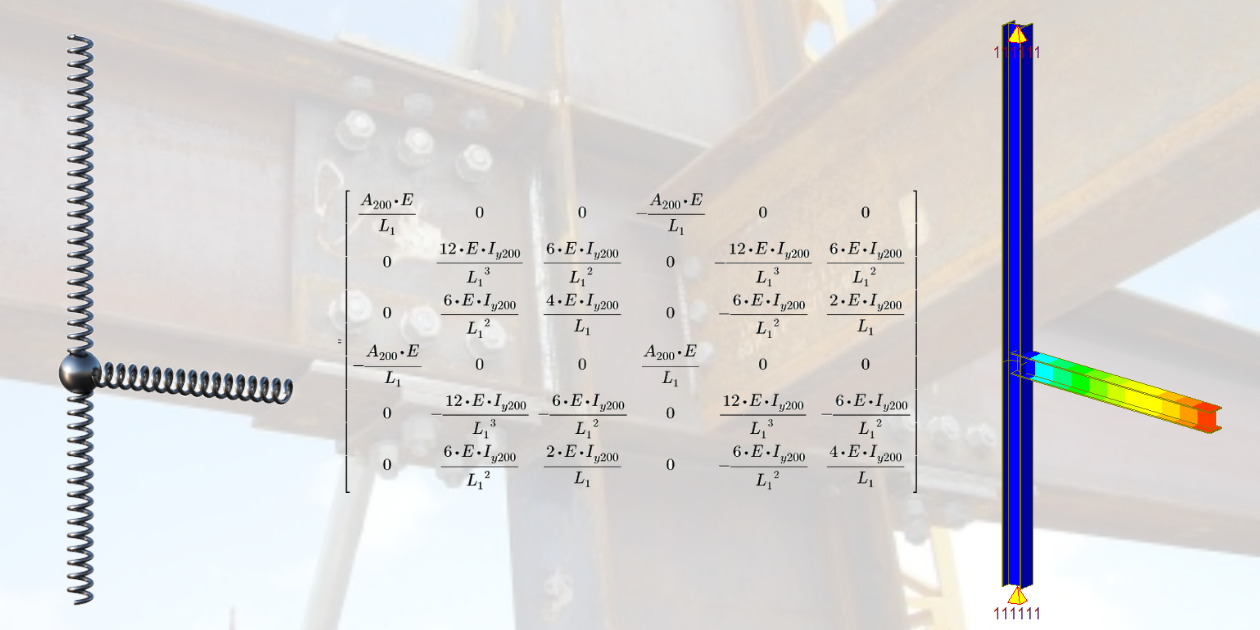
Lokale Steifigkeitsmatrix
Die Steifigkeitsmatrix beschreibt die Beziehung zwischen der Änderung der Verschiebungen (und Rotationen) an den Trägerenden und den entsprechenden Kräften (Reaktionen). Es ist zu beachten, dass jeder Knoten im 2D-Arbeitsbereich drei Freiheitsgrade hat (zwei Verschiebungen und eine Rotation), was zu einer lokalen Matrix mit den Abmessungen 6x6 führt. Diese Matrix repräsentiert die Normalsteifigkeit, Schubsteifigkeit und Biegesteifigkeit des Elements.
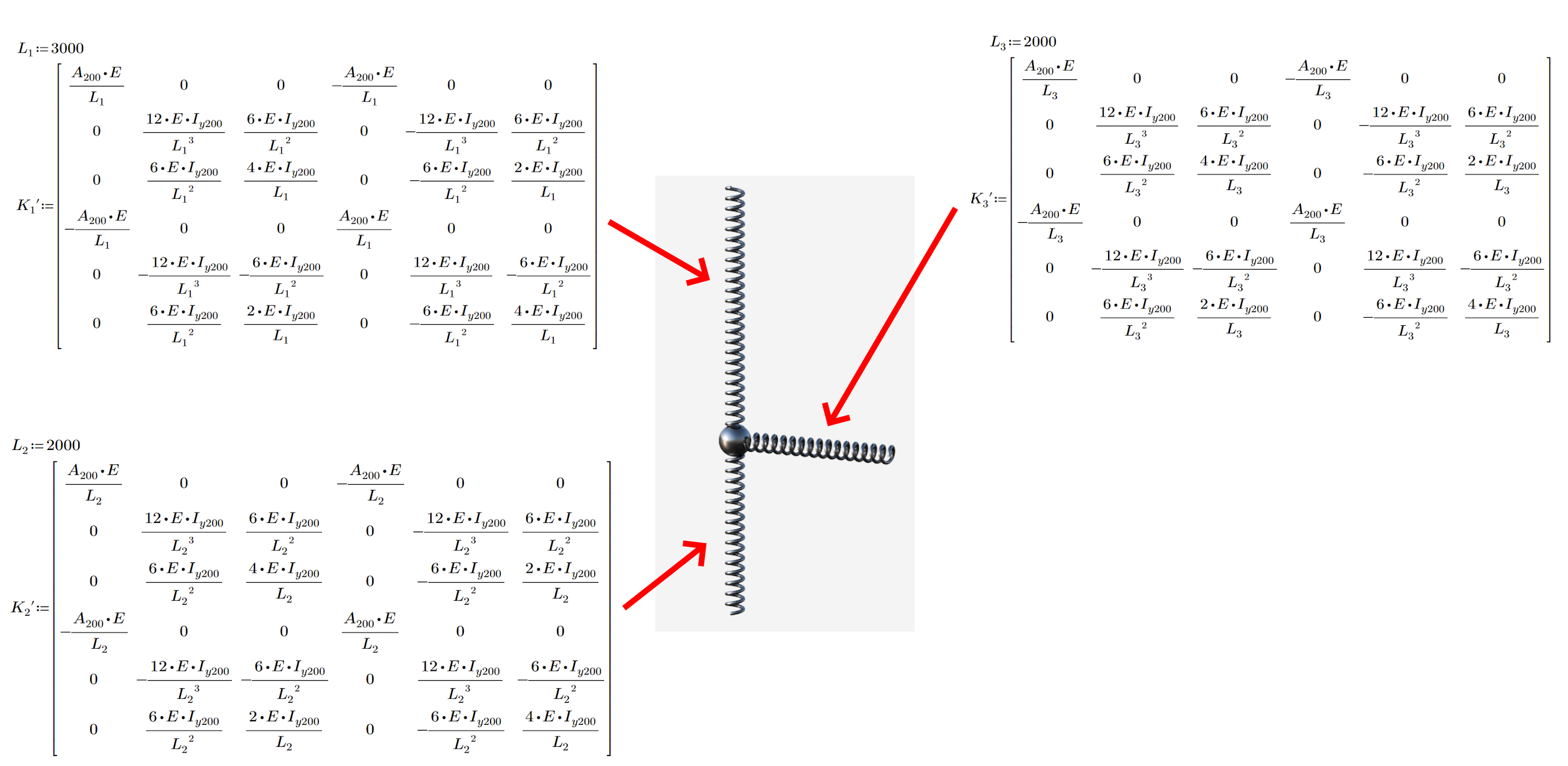
02) Lokale Steifigkeitsmatrix aller Bauteile
Transformationsmatrix
Bei 90 % der Strukturen stimmt die lokale Steifigkeitsmatrix der Bauteile nicht mit dem globalen Koordinatensystem überein. Nur einfache Träger, die in einer geraden Linie ausgerichtet sind, haben dasselbe lokale Koordinatensystem (LKS) und globale Koordinatensystem (GKS). In unserem Fall ist das dritte Element um 90 Grad um Knoten zwei gedreht. Diese Transformation ist für die bevorstehenden Berechnungen notwendig.

03) Transformationsmatrix Bauteil 1,2; Transformationsmatrix Bauteil 3
Transformation in ein globales Koordinatensystem
Für eine genaue Verschiebungsberechnung ist es wesentlich, die Koordinatensysteme aller beteiligten Bauteile aufeinander abzustimmen. Eine Möglichkeit, dies zu erreichen, ist die Verwendung einer Transformationsmatrix, die den Prozess vereinfacht und einen reibungslosen Übergang zur Verschiebungsberechnung ermöglicht. Die Transformation ändert die Matrix für Bauteile eins und zwei nicht, da ihr lokales Koordinatensystem mit dem globalen übereinstimmt. Bei Bauteil drei, das um etwa 90 Grad gedreht ist, ist jedoch eine Änderung zu beobachten. Die Einträge für X- und Z-Verschiebungen sind entsprechend angepasst. Es können kleine von null verschiedene Zahlen in der Matrix auffallen. Diese entstehen durch den numerischen Prozess, beeinflussen die Ergebnisse jedoch aufgrund ihrer geringen Größe im Verhältnis zur Gesamtsteifigkeit nicht wesentlich.
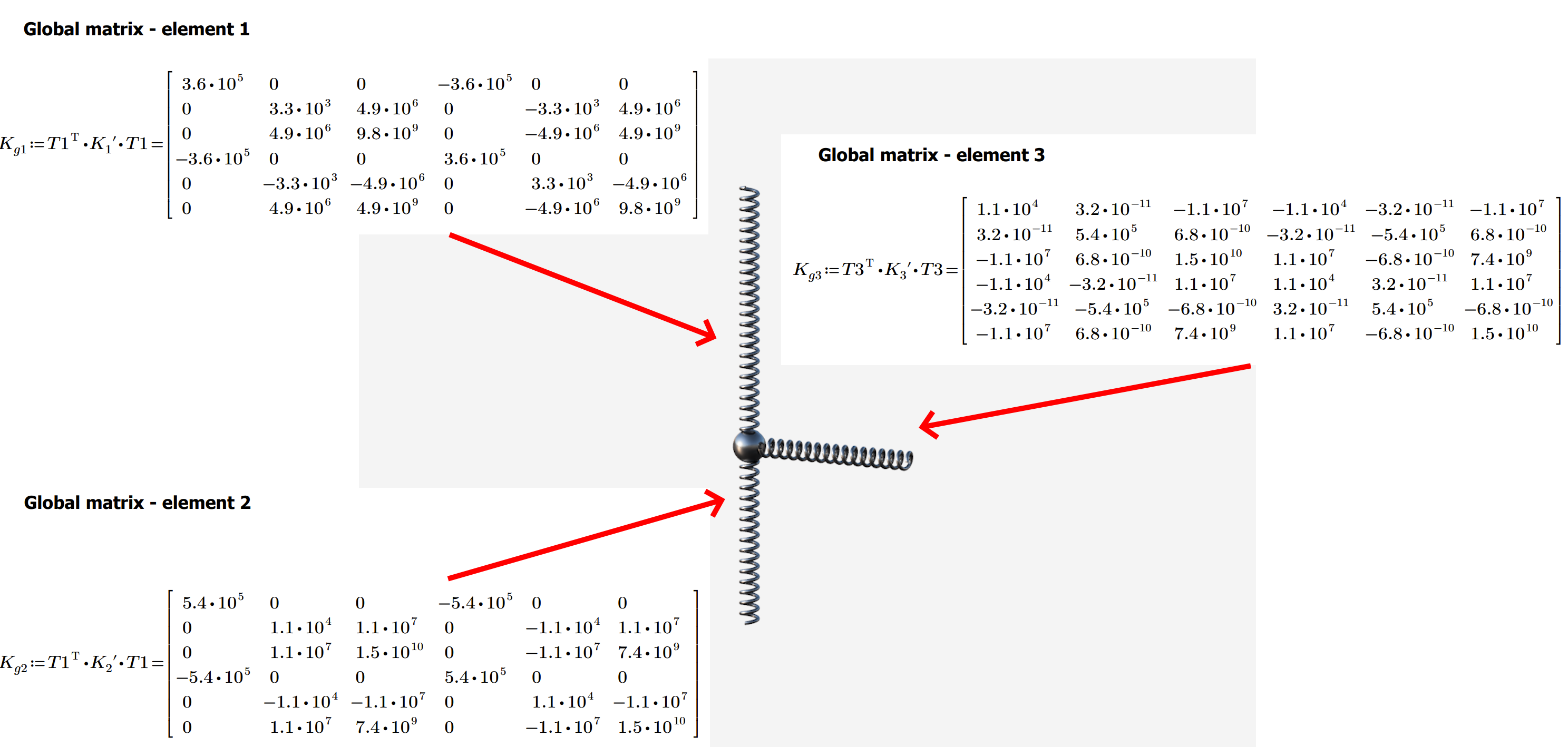
04) Globale Matrix Bauteil 1,2; Globale Matrix Bauteil 3
Globale Matrix – Summation
Es gibt vier Knoten, und jeder Knoten hat drei Freiheitsgrade. Das bedeutet, dass die resultierende Matrix die Abmessungen 12x12 hat. Der entscheidende Teil des Prozesses ist das Addieren der Werte in Spalten und Zeilen aus den einzelnen Matrizen zur globalen Matrix.
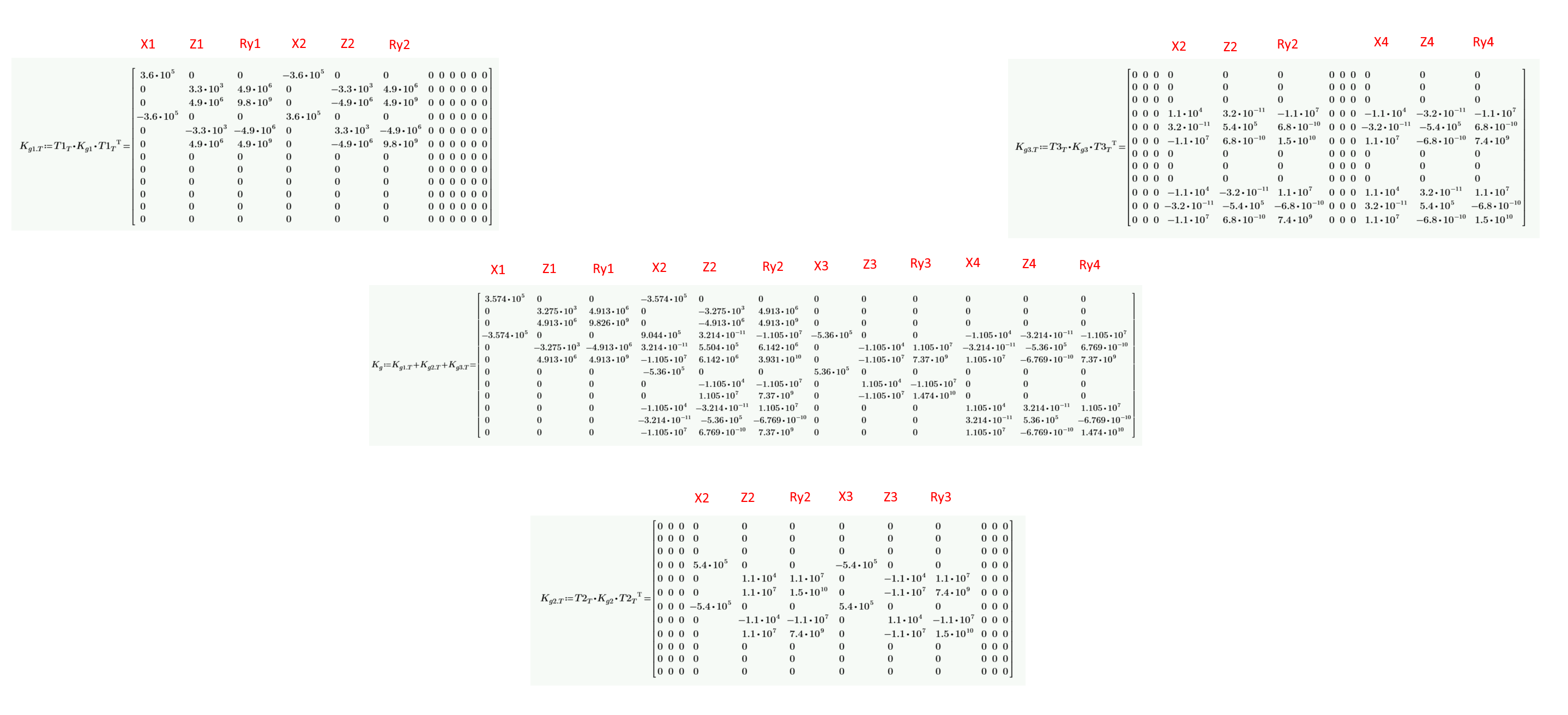
05) Globale Steifigkeitsmatrix des gesamten Systems
Randbedingung und Lastvektor
Ohne Randbedingungen ist das System unterbestimmt (und es kann nur die triviale Lösung erhalten werden). In diesem Szenario werden feste Einspannungen an den Knoten eins und drei berücksichtigt. Die Null-Randverschiebungen (und -rotationen) können durch Entfernen der entsprechenden Zeilen und Spalten dargestellt werden. Die Lösung ist trivial, wenn keine Kräfte aufgebracht werden (Nullverschiebungen). In unserem Beispiel ist Knoten vier einer vertikalen Kraft von 50 kN ausgesetzt.

06) Reduzierte Matrix, Lastvektor und aufgebrachte Randbedingungen
Lösung
Unter Berücksichtigung kleiner Verformungen und linear-elastischen Materials kann der Vektor der unbekannten Verschiebungen mühelos in einem einzigen Schritt gelöst werden. Dieser Ansatz ist schnell und äußerst effektiv und stellt eine praktische Methode zur Behandlung verschiebungsbezogener Fragestellungen dar.
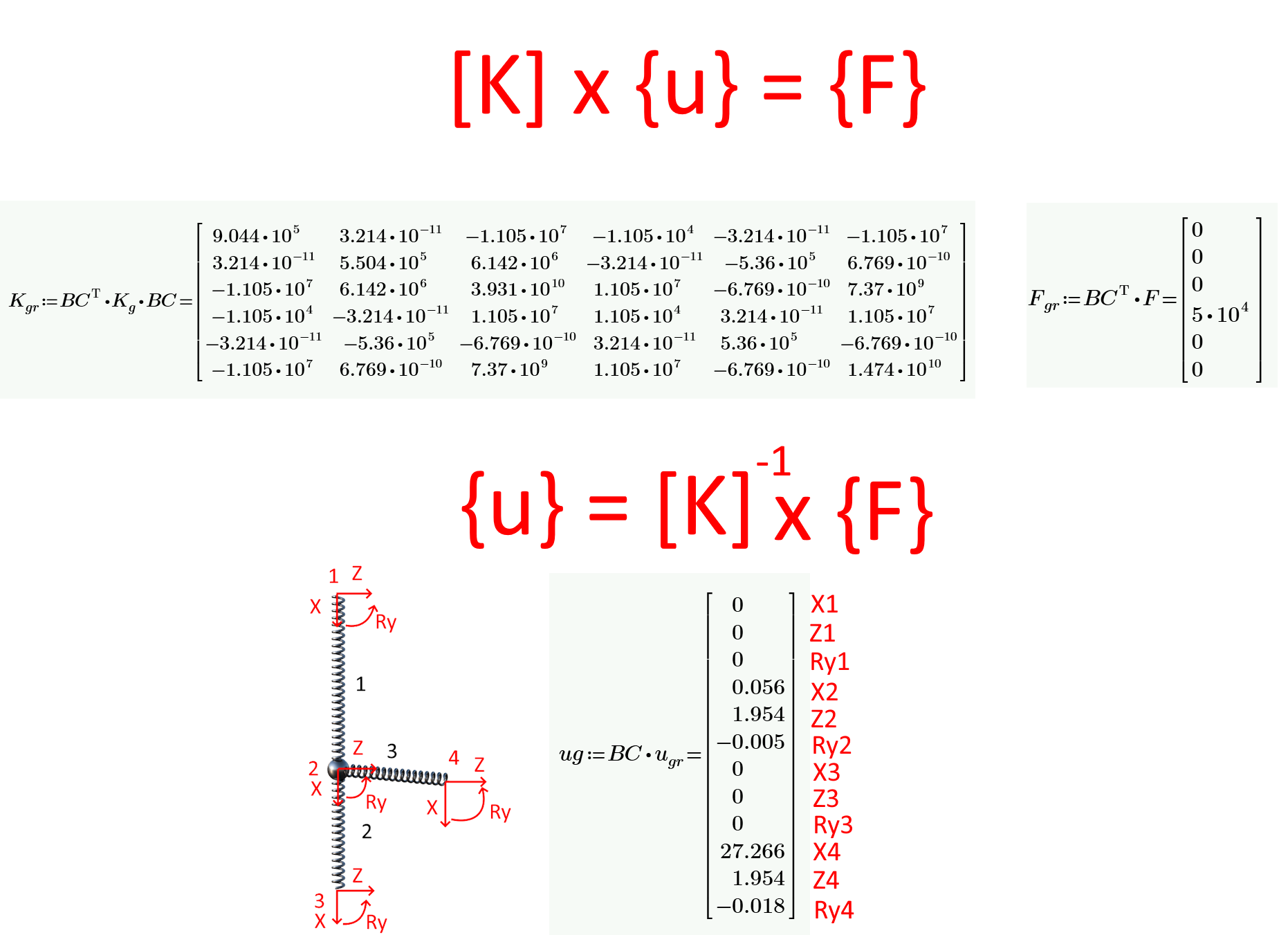
07) Knotenverschiebung im GKS
FEA-Verifikation
Da die angegebenen Werte für die Knoten präzise sind, ist es unerlässlich, dass die Ausgabe der Finite-Elemente-Analyse (FEA) genau mit der des direkten Steifigkeitsverfahrens (DSV) übereinstimmt. Diese Anforderung stellt sicher, dass die analytischen Ergebnisse mit dem tatsächlichen Verhalten des untersuchten Systems übereinstimmen. Daher ist es entscheidend sicherzustellen, dass die FEA- und DSV-Ausgaben innerhalb der akzeptablen Toleranzgrenzen übereinstimmen.
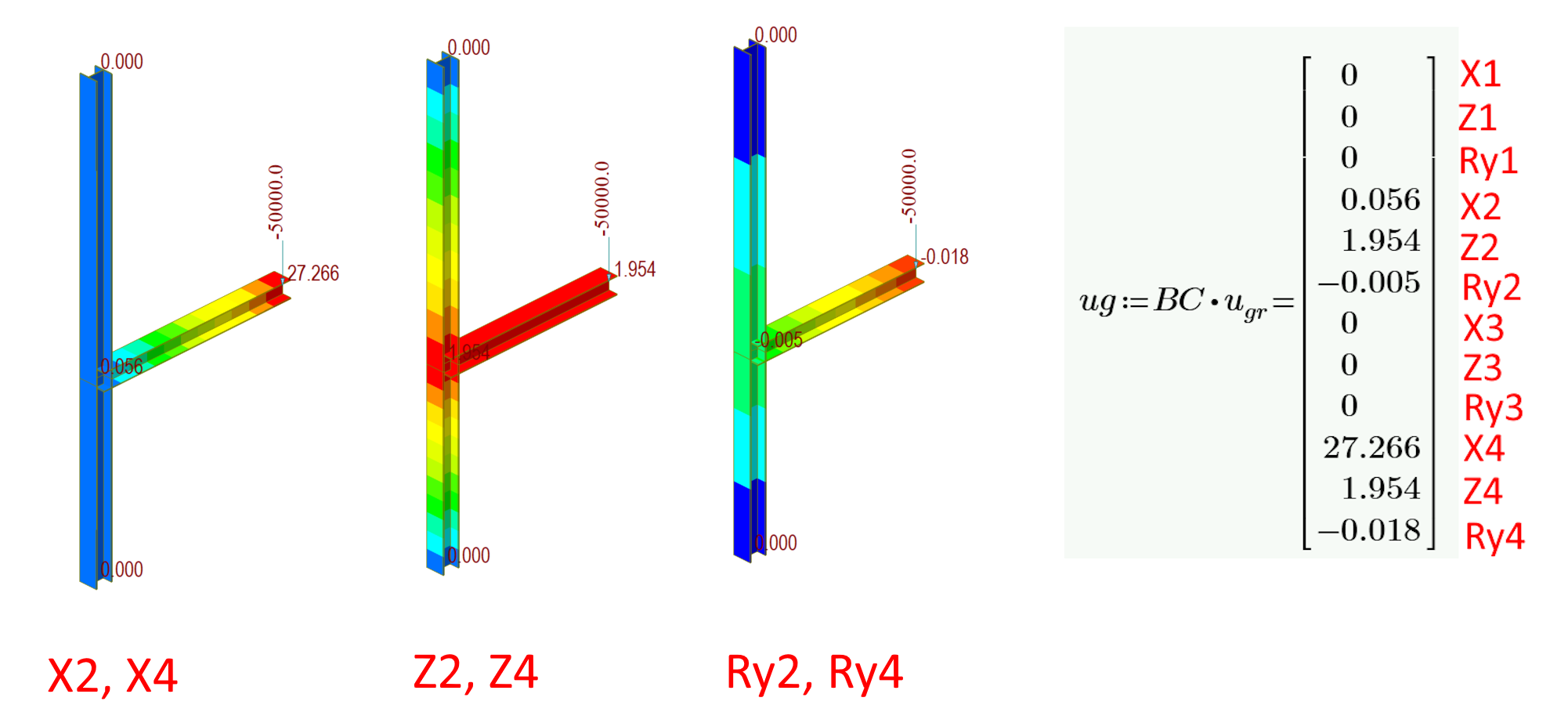
08) Verifikation und Vergleich der Knotenverschiebung zwischen DSV und FEA
Direktes Steifigkeitsverfahren – halbstarre Verbindungen
Es ist wichtig zu verstehen, dass Verbindungen typischerweise halbstarr und nicht vollständig starr oder gelenkig sind. Die Vernachlässigung der Steifigkeit einer Verbindung kann dazu führen, dass sich das Verhalten einer Struktur im Modell von dem einer realen Struktur unterscheidet. Lassen Sie uns untersuchen, wie die Steifigkeit bei Berechnungen berücksichtigt wird und wie sie das Verhalten der Struktur selbst beeinflusst.
Rotationsfeder und Ingenieurbauwerke
Stählerne Ingenieurbauwerke wie Hallen und Tragwerke sind so bemessen, dass sie Biegelasten effizient aufnehmen, die von den Trägern übertragen werden. Wenn der Träger belastet wird und die Struktur hyperstatisch ist, spielt die Rotationssteifigkeit des Knotens eine entscheidende Rolle für eine korrekte Lastumverteilung und präzise Verformung. Deshalb ist es wichtig, die strukturelle Integrität des Knotens zu erhalten, um mögliche Schäden an der Struktur zu verhindern.
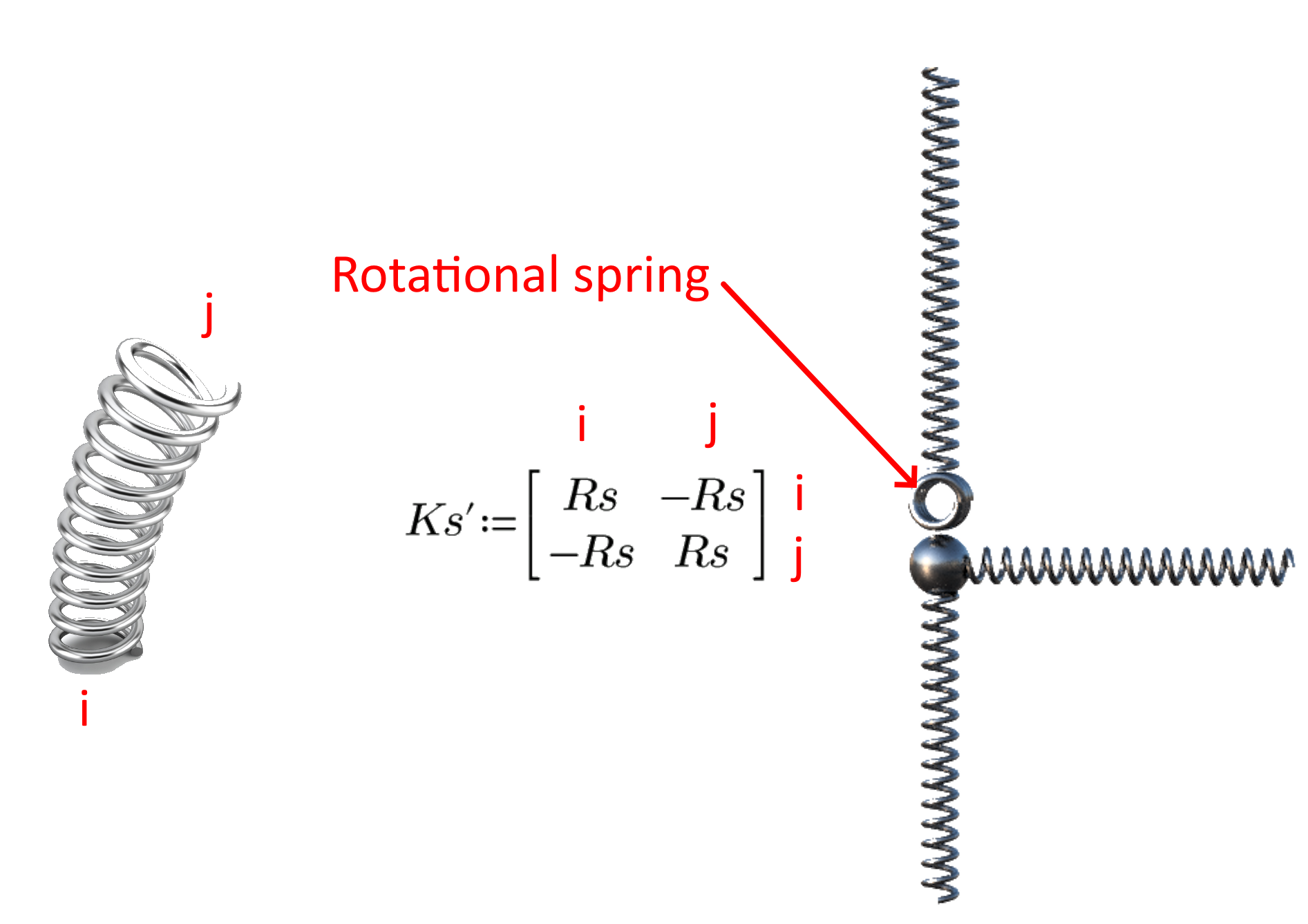
09) Rotationsfeder – lokale Matrix
Um die Kompatibilität in einem Knoten sicherzustellen, ist es wichtig, die Verformungen zu koppeln. Diese Kopplung sollte in der globalen Steifigkeitsmatrix enthalten sein, um die Verformungen zu berechnen. Wenn Rotationssteifigkeit angewendet wird, müssen weitere Freiheitsgrade als zusätzliche Zeile und Spalte in die globale Steifigkeitsmatrix aufgenommen werden. Die endgültige Matrix für diesen Verbindungstyp hat eine Dimension von 13x13, während eine starre Verbindungsmatrix eine Dimension von 12x12 hat.
Einfluss der Rotationssteifigkeit
Die Rotationssteifigkeit einer Struktur hat einen erheblichen Einfluss darauf, wie Kräfte verteilt werden und Verformungen auftreten. Das bedeutet, dass sich eine Struktur mit Rotationssteifigkeit anders verhält als eine Struktur mit starren oder gelenkigen Verbindungen. Wenn die Steifigkeit unverhältnismäßig erhöht wird, kann dies zu weiteren Änderungen im Verhalten der Struktur führen. In diesem Szenario werden die Auswirkungen einer erhöhten Rotationssteifigkeit untersucht. Das verwendete Modell stammt aus dem vorherigen Kapitel, und die Rotationsfeder ist am Ende (j) von Bauteil eins befestigt.
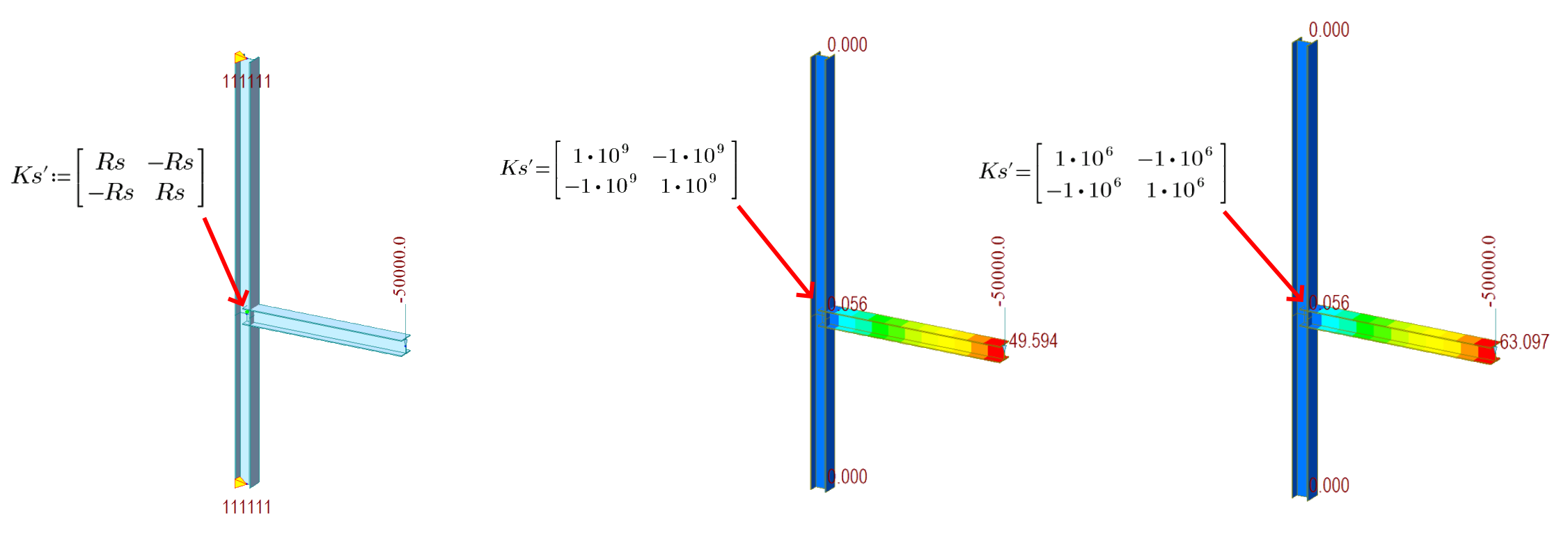
10) Verformungen für verschiedene Rotationssteifigkeiten
Das Diagramm zeigt, dass sich die Verformung in bestimmten Steifigkeitsbereichen für eine halbstarre Verbindung multilinear ändert. Bei halbstarren Verbindungen führt eine Unter- oder Überschätzung der Steifigkeit zu erheblichen Unterschieden in den Durchbiegungen und der Umverteilung der Schnittgrößen.
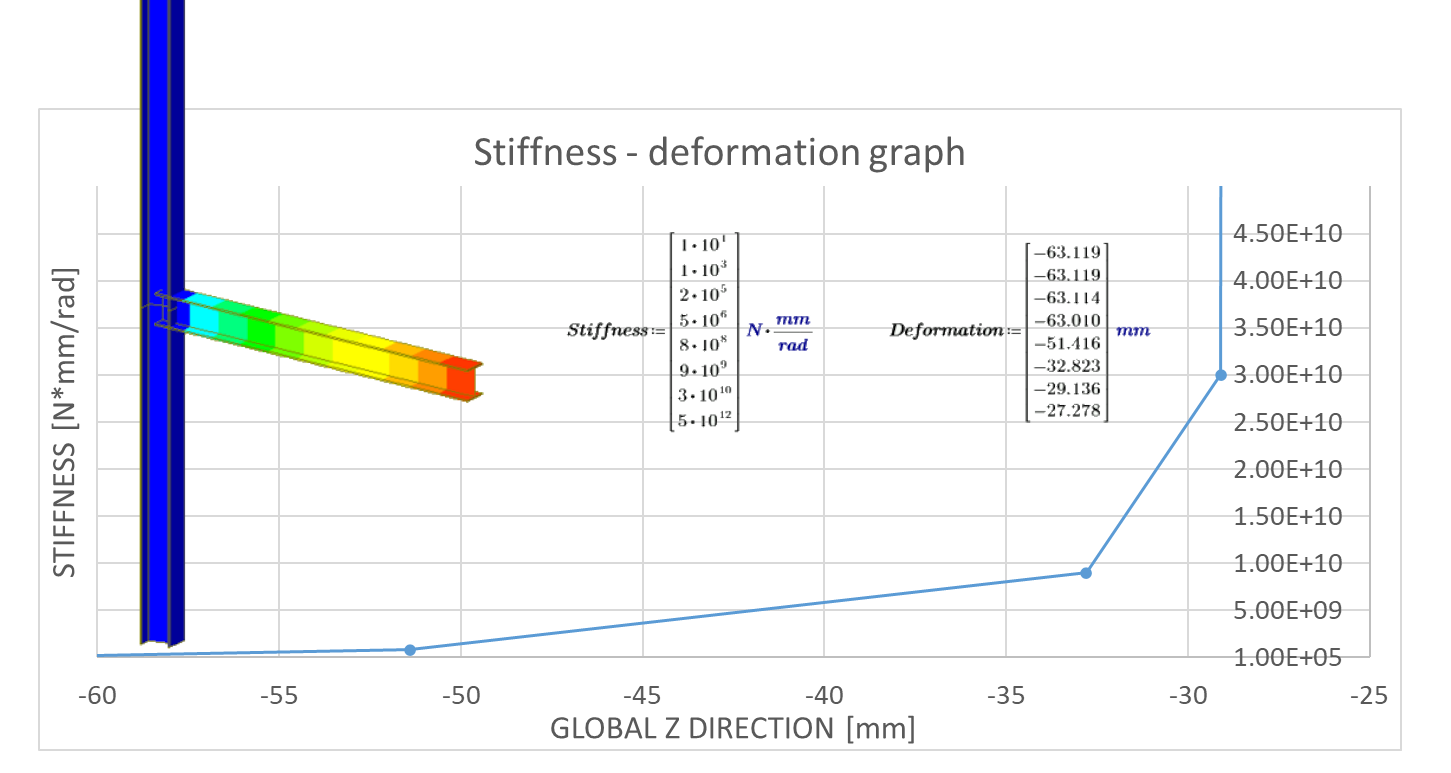
11) Steifigkeits-Verformungs-Diagramm
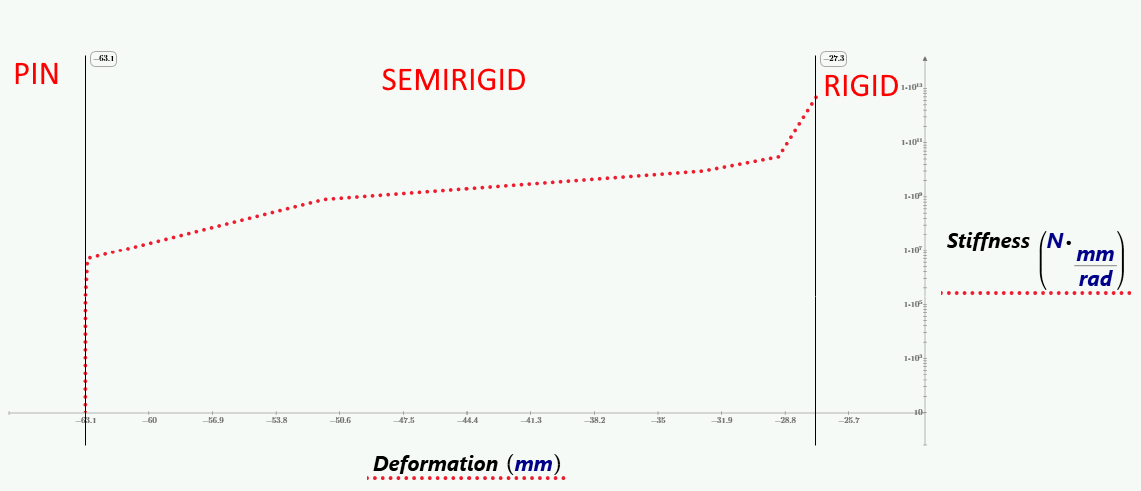
12) Steifigkeitsbereiche für Verbindungen
Fazit und bevorstehende Themen
Um den Erfolg unserer bevorstehenden Studie sicherzustellen, müssen Sie zunächst ein tiefes Verständnis des vorliegenden Problems erlangen. Erst dann können Sie mit Zuversicht und Zielstrebigkeit voranschreiten. Unsere Studie widmet sich der Untersuchung einer Reihe wichtiger Themen, die für die untersuchte Fragestellung relevant sind. Durch sorgfältige Recherche und Analyse hoffen wir, neues Licht auf dieses komplexe und anspruchsvolle Problem zu werfen und letztendlich zu einem besseren Verständnis dieses wichtigen Forschungsbereichs beizutragen.
- Wie wird die Rotationssteifigkeit in IDEA StatiCa berechnet
- Wie man Steifigkeit für mehrere Bauteile in einem FEA-Werkzeug verwendet
- Verifikation der Rotationssteifigkeit zwischen IDEA StatiCa und ABAQUS für eine Platte-zu-Platte-Verbindung
Testen Sie IDEA StatiCa kostenlos

