Közvetlen merevségi módszer
Motiváció
A végeselem-analízis (FEA) mélyreható ismerete elengedhetetlen mind a pontos bemeneti adatok biztosításához, mind az eredmények megfelelő bemutatásához. Ennek a cikknek a fő célja annak magyarázata, hogyan kerül összeállításra a mátrix minden FEA szoftver hátterében, és hogyan befolyásolhatja a forgási merevség egy szerkezet globális viselkedését. Ez a cikk egy közelgő cikk előfeltételeként szolgál, amelyben az összes megállapítást egy szerkezetre alkalmazzák az IDEA StatiCa Connection segítségével.
A közvetlen merevségi módszer – merev kapcsolatok
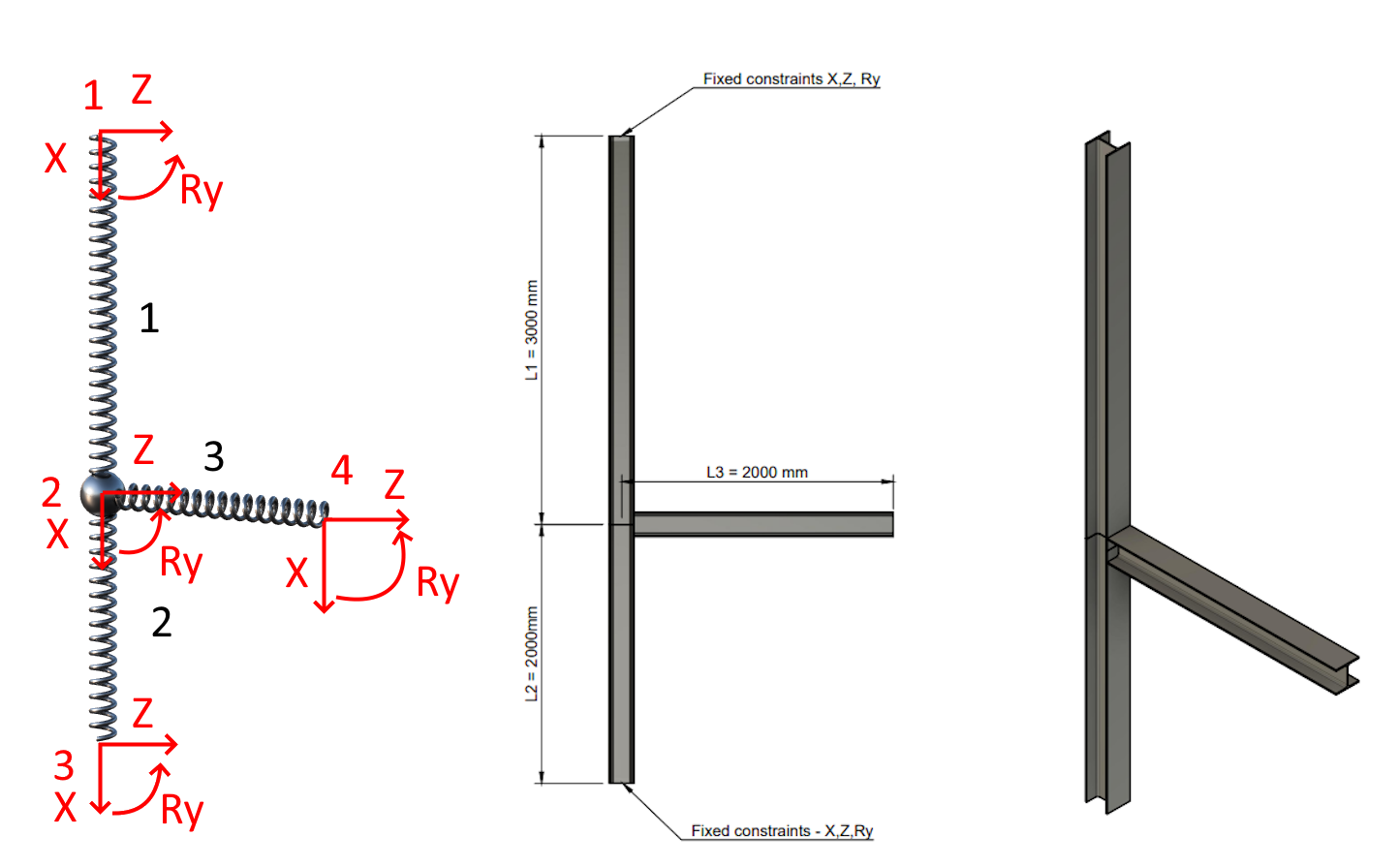
Nézzük meg az 1. ábrán látható szerkezet egyszerű példáját. A szerkezet egy oszlopból és egy gerendából áll, azonos HEA 200 keresztmetszeti tulajdonságokkal. Minden csomópontnak három szabadsági foka van, beleértve két elmozdulást (X és Z) és egy elfordulást (Ry). A munkaterület 2D. Az anyag acél, 200 000 MPa rugalmassági modullal.
01) Rugómodell – GCS, geometria, axonometria + HEA 200 keresztmetszetek
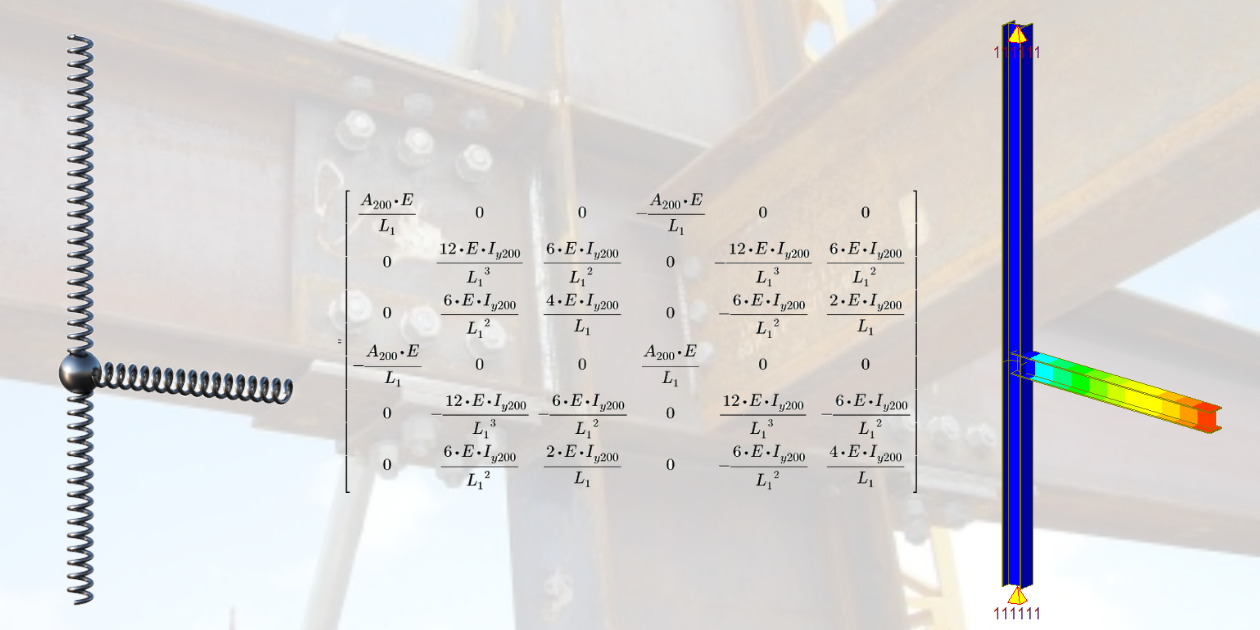
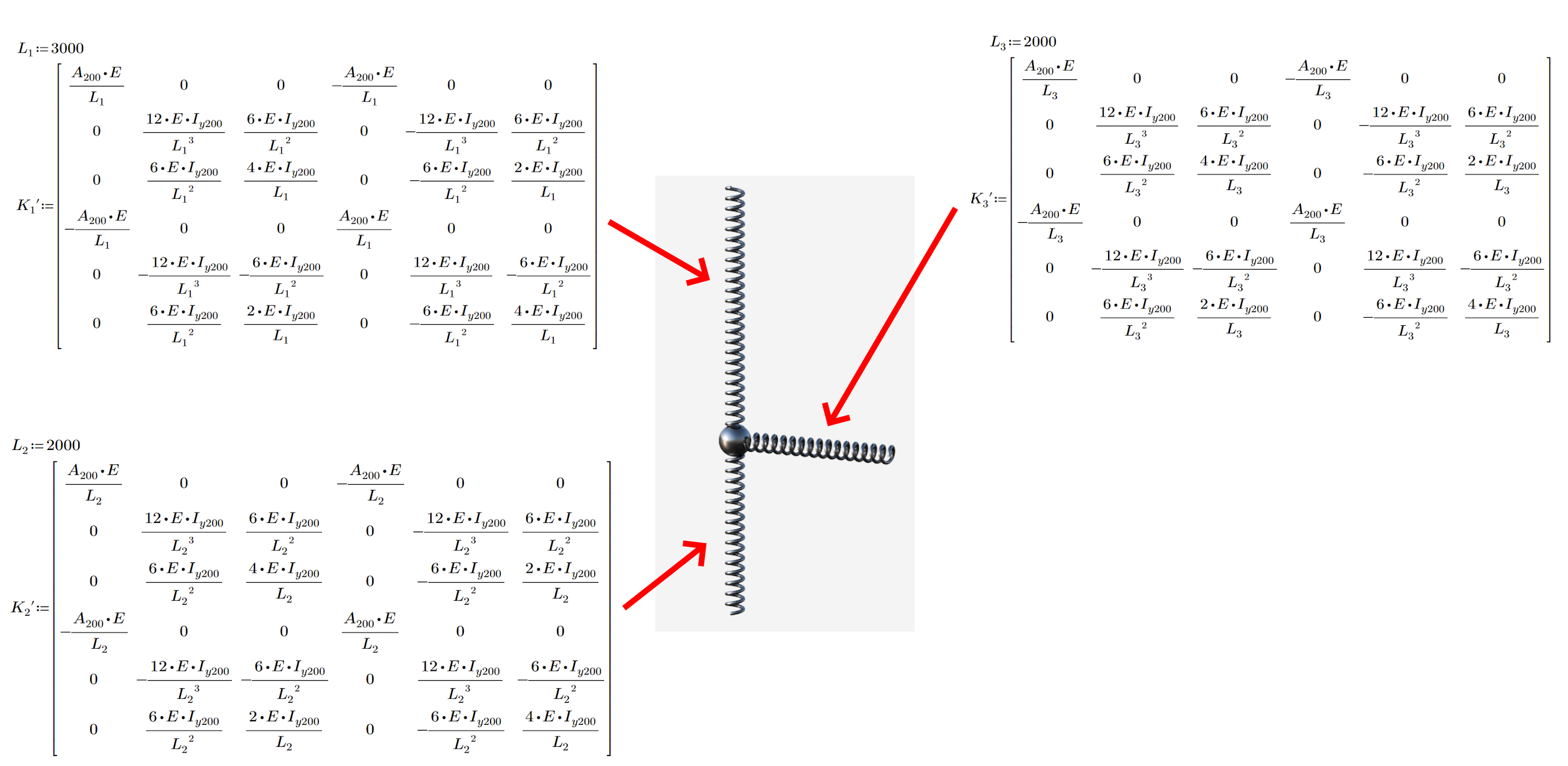
Lokális merevségi mátrix
A merevségi mátrix szabályozza az összefüggést a gerenda végein bekövetkező elmozdulások (és elfordulások) változása és a megfelelő erők (reakciók) között. Érdemes megjegyezni, hogy a 2D munkaterület minden csomópontjának három szabadsági foka van (két elmozdulás és egy elfordulás), ami egy 6x6 méretű lokális mátrixot eredményez. Ez a mátrix az elem normál merevségét, nyírási merevségét és hajlítási merevségét reprezentálja.
02) Az összes szerkezeti elem lokális merevségi mátrixa
Transzformációs mátrix
A szerkezetek 90%-ában a szerkezeti elemek lokális merevségi mátrixa nem illeszkedik a globális koordináta-rendszerhez. Csak az egyenes vonalban elrendezett egyszerű gerendáknak van azonos Lokális Koordináta-rendszere (LCS) és Globális Koordináta-rendszere (GCS). A mi esetünkben a harmadik elem 90 fokkal el van forgatva a második csomópont körül. Ez az átalakítás szükséges a következő számításokhoz.

03) Transzformációs mátrix 1,2. szerkezeti elem; Transzformációs mátrix 3. szerkezeti elem
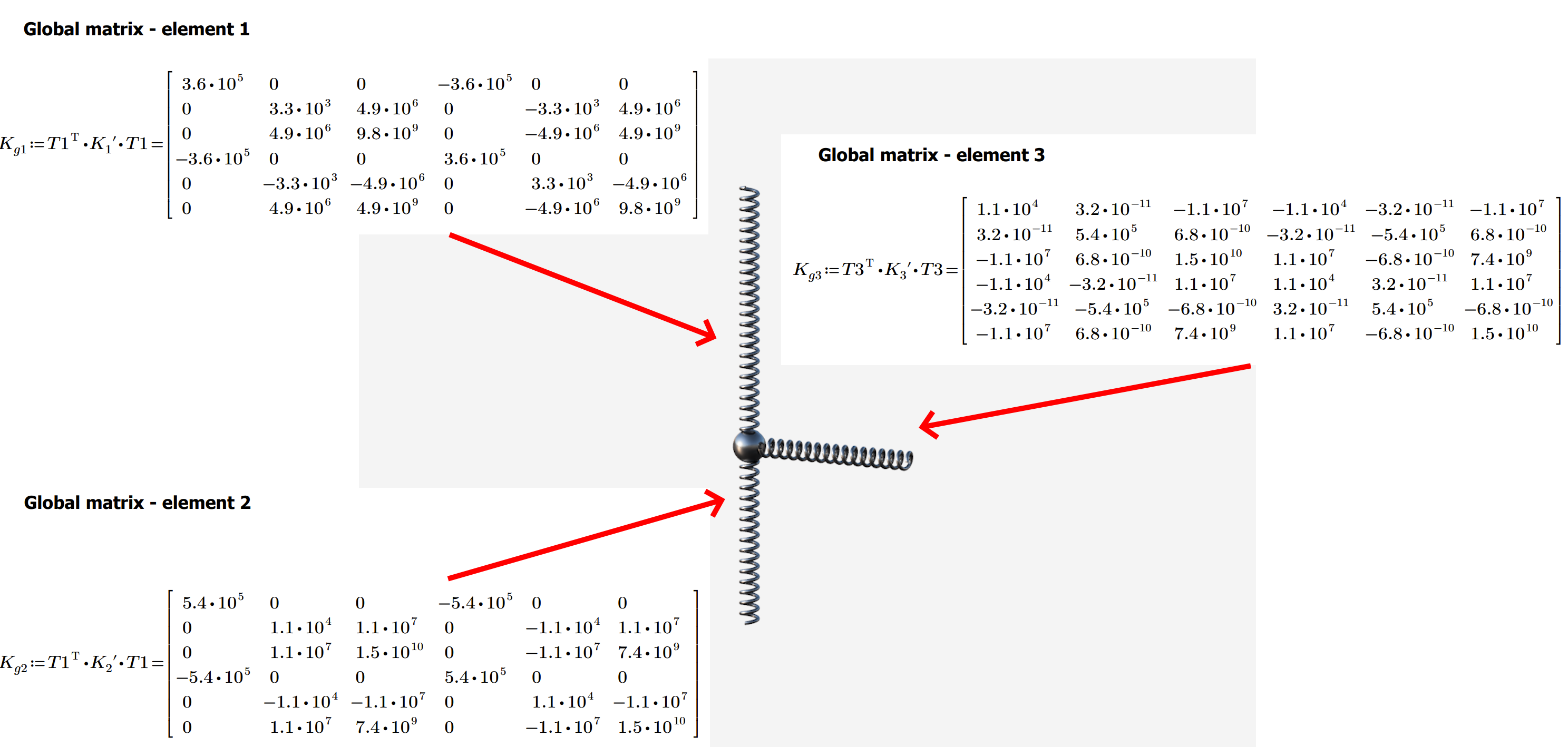
Átalakítás globális koordináta-rendszerbe
A pontos elmozdulásszámításhoz elengedhetetlen az összes érintett szerkezeti elem koordináta-rendszerének összehangolása. Ennek egyik módja a transzformációs mátrix alkalmazása, amely egyszerűsíti a folyamatot és lehetővé teszi a zökkenőmentes átmenetet az elmozdulásszámításhoz. Az átalakítás nem módosítja az első és második szerkezeti elem mátrixát, mivel azok lokális koordináta-rendszere megegyezik a globálissal. Azonban megfigyelhető egy változás a harmadik szerkezeti elemnél, amely körülbelül 90 fokkal el van forgatva. Az X és Z elmozdulásokhoz tartozó bejegyzések felcserélődnek. Észreveheti a mátrixban lévő kis, nem nulla értékű számokat. Ezek a numerikus folyamatból erednek, de mivel viszonylag kicsik az összesített merevséghez képest, nem befolyásolják jelentős mértékben az eredményeket.
04) Globális mátrix 1,2. szerkezeti elem; Globális mátrix 3. szerkezeti elem
Globális mátrix – összegzés
Négy csomópontja van, és minden csomópontnak három szabadsági foka van. Ez azt jelenti, hogy az eredő mátrix mérete 12x12. A folyamat döntő része az egyes mátrixok oszlopaiból és soraiból származó értékek összeadása a globális mátrixba.
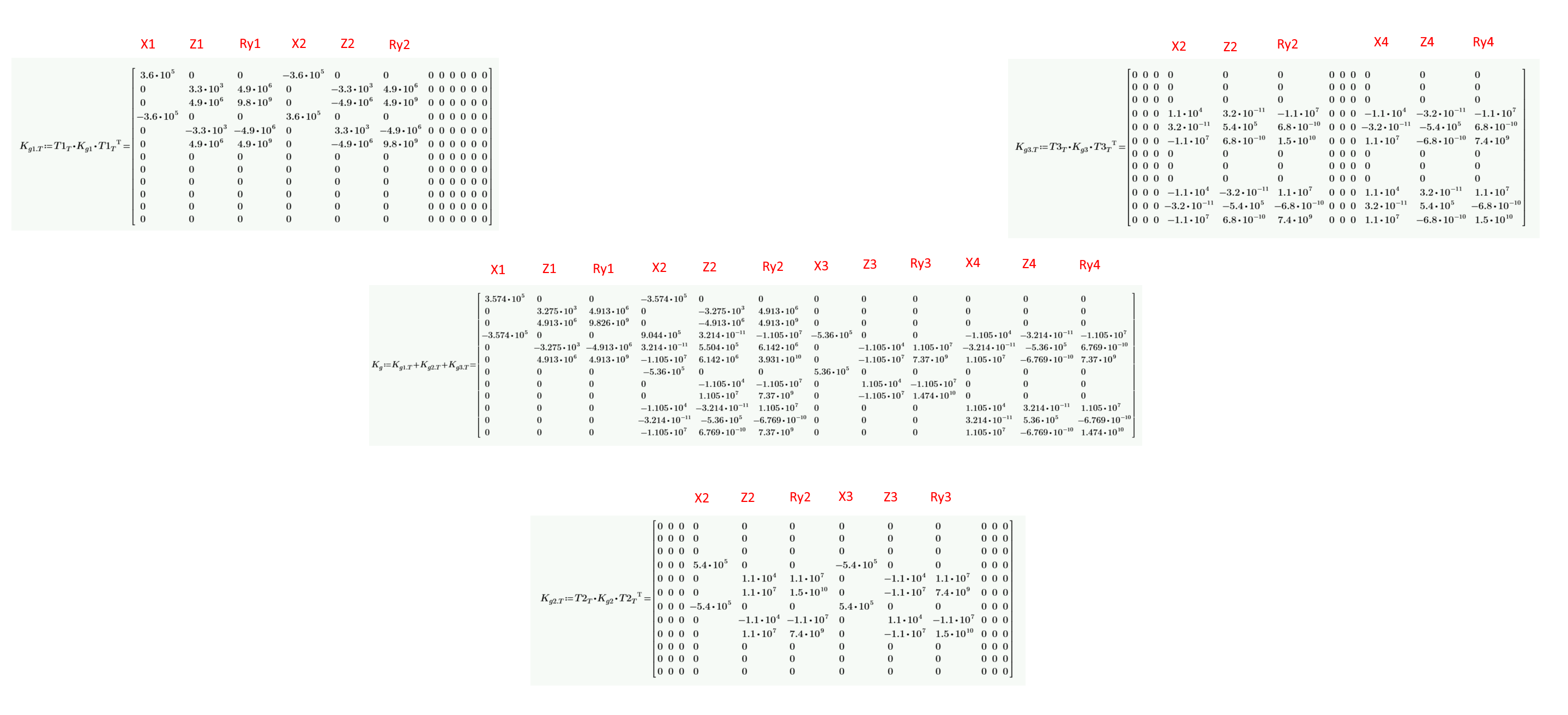
05) A teljes rendszer globális merevségi mátrixa
Peremfeltétel és terhelésvektora
Peremfeltételek nélkül a rendszer alulhatározott (és csak a triviális megoldás nyerhető). Ebben a forgatókönyvben az első és harmadik csomópontban befogott kényszerfeltételeket veszünk figyelembe. A nulla peremeltolódások (és elfordulások) a megfelelő sorok és oszlopok eltávolításával ábrázolhatók. A megoldás triviális, ha nem alkalmaznak erőket (nulla elmozdulások). Példánkban a negyedik csomópontra 50 kN-os függőleges erő hat.

06) Redukált mátrix, terhelésvektor ésalkalmazott peremfeltételek

