Enfoque de rigidez directa
Motivación
Tener un profundo conocimiento del Análisis por Elementos Finitos (FEA) es crucial tanto para garantizar entradas precisas como para presentar los resultados de la manera correcta. El objetivo principal de este artículo es explicar cómo se ensambla la matriz en el trasfondo de todo software de FEA y cómo la rigidez rotacional puede influir en el comportamiento global de una estructura. Este artículo sirve como requisito previo para un artículo próximo, donde todos los hallazgos se aplicarán a una estructura utilizando IDEA StatiCa Connection.
El enfoque de rigidez directa – uniones rígidas
Veamos el ejemplo sencillo de una estructura mostrada en la figura 1. La estructura consiste en un pilar y una viga con propiedades de sección transversal idénticas HEA 200 . Cada nodo tiene tres grados de libertad, incluyendo dos traslaciones (X y Z) y una rotación (Ry). El espacio de trabajo es 2D. El material es acero con un módulo de elasticidad de 200.000 MPa.
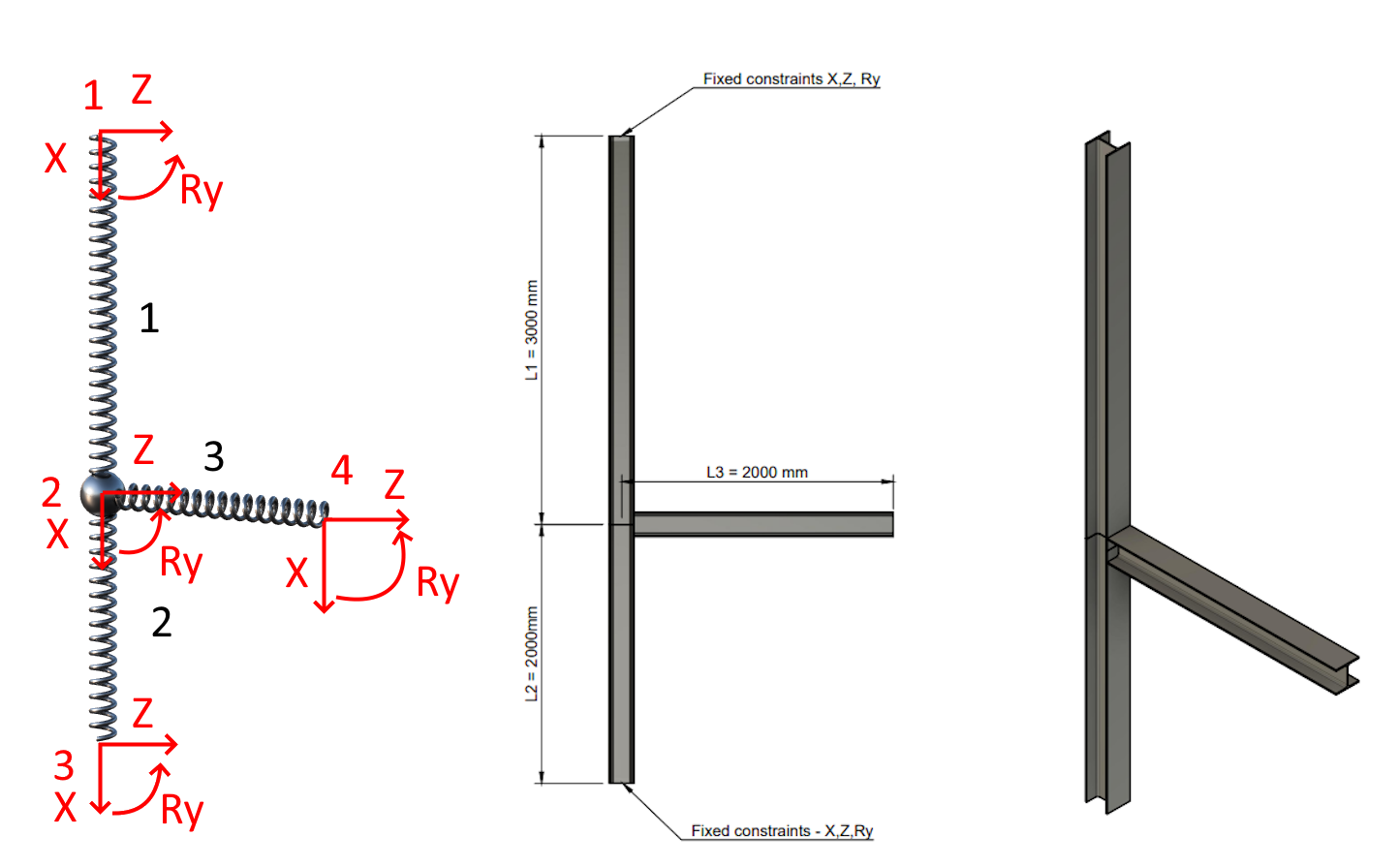
01) Modelo de muelle-GCS, geometría, axonometría + secciones HEA 200
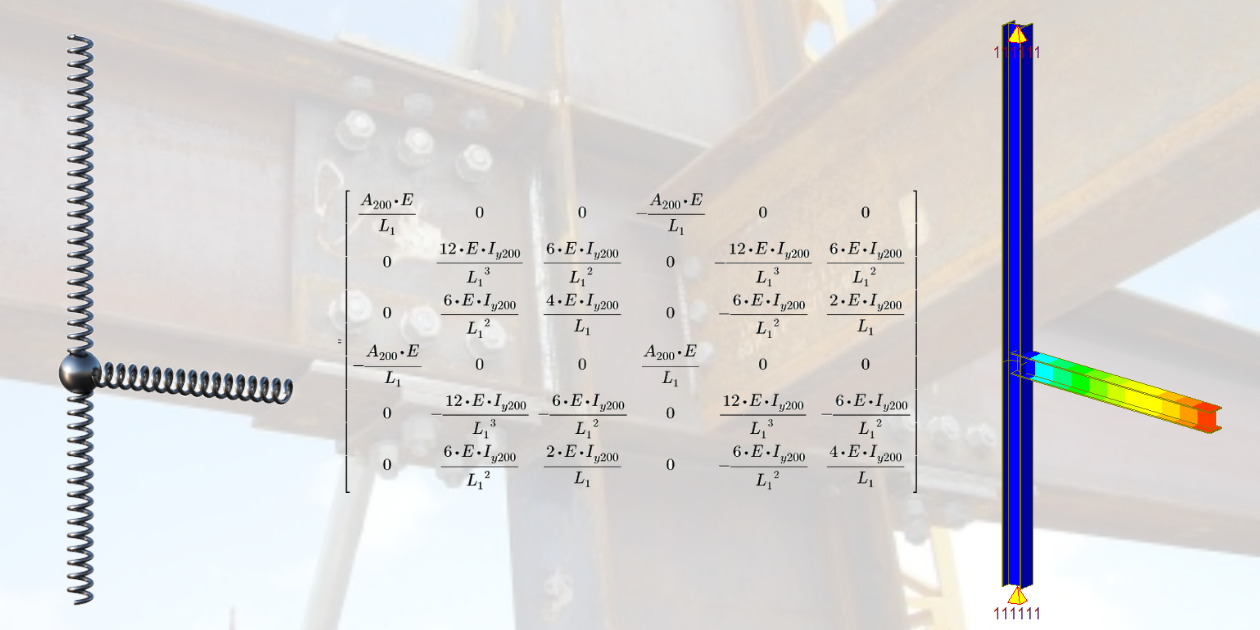
Matriz de rigidez local
La matriz de rigidez rige la relación entre el cambio de desplazamientos (y rotaciones) en los extremos de la viga y las fuerzas correspondientes (reacciones). Vale la pena señalar que cada nodo en el espacio de trabajo 2D tiene tres grados de libertad (dos traslaciones y una rotación), lo que resulta en una matriz local con dimensiones de 6x6. Esta matriz representa la rigidez normal, la rigidez a cortante y la rigidez a flexión del elemento.
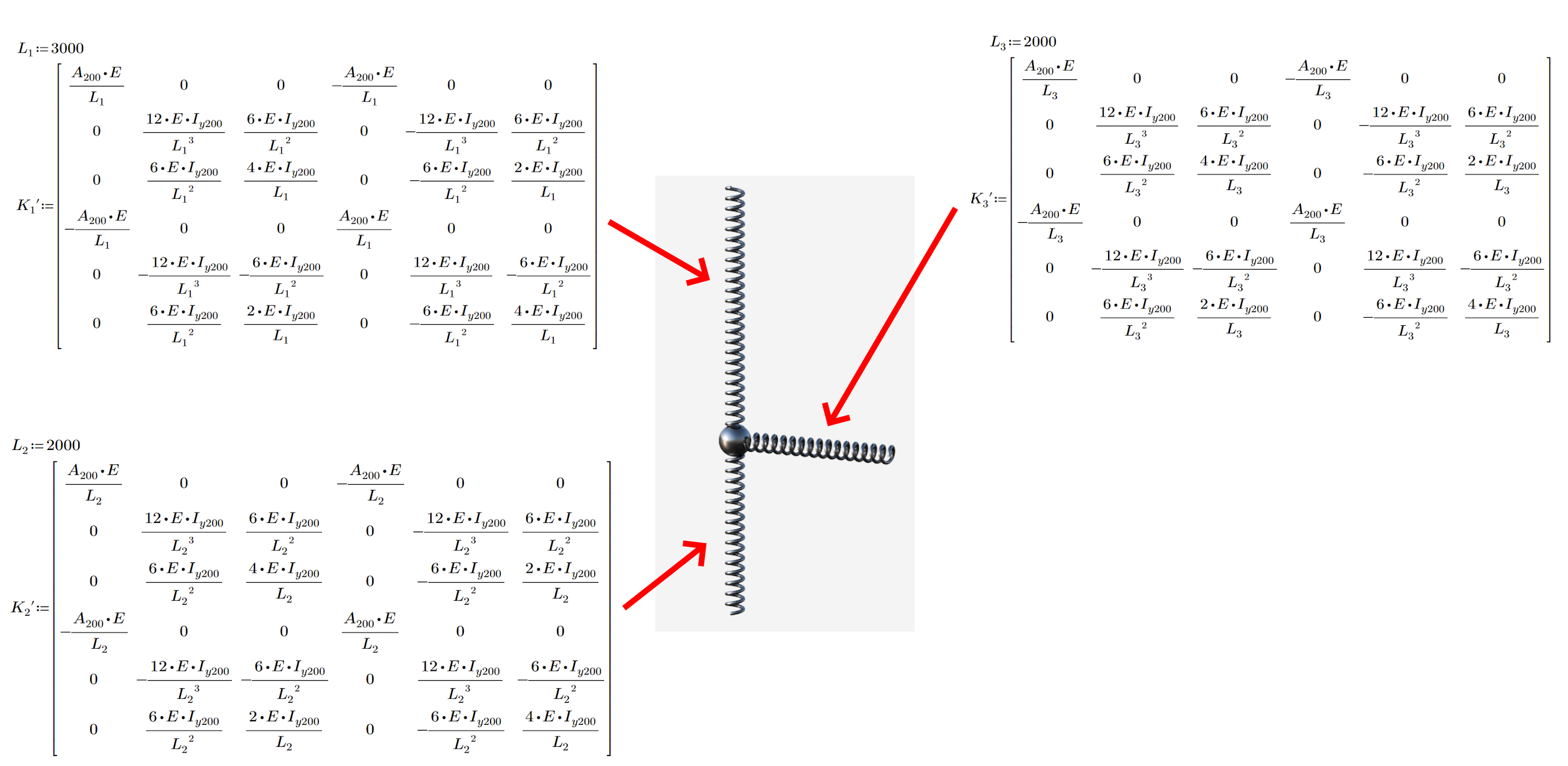
02) Matriz de rigidez local de todos los elementos
Matriz de transformación
En el 90% de las estructuras, la matriz de rigidez local de los elementos no se alinea con el sistema de coordenadas global. Solo las vigas simples alineadas en línea recta tienen el mismo Sistema de Coordenadas Local (LCS) y Sistema de Coordenadas Global (GCS). En nuestro caso, el tercer elemento está girado 90 grados alrededor del nodo dos. Esta transformación es necesaria para los cálculos posteriores.

03) Matriz de transformación elemento 1,2; Matriz de transformación elemento 3
Transformación a un sistema de coordenadas global
Para un cálculo preciso de desplazamientos, es esencial alinear los sistemas de coordenadas de todos los elementos involucrados. Una forma de lograrlo es mediante el uso de una matriz de transformación, que simplifica el proceso y permite una transición fluida al cálculo de desplazamientos. La transformación no modifica la matriz para los elementos uno y dos, ya que su sistema de coordenadas local es el mismo que el global. Sin embargo, se puede observar un cambio en el elemento tres, que está girado aproximadamente 90 grados. Las entradas para las traslaciones X y Z son. Puede notar los pequeños números distintos de cero en la matriz. Estos provienen del proceso numérico, pero dado que son relativamente pequeños con respecto a la rigidez global, no afectan los resultados de manera significativa.
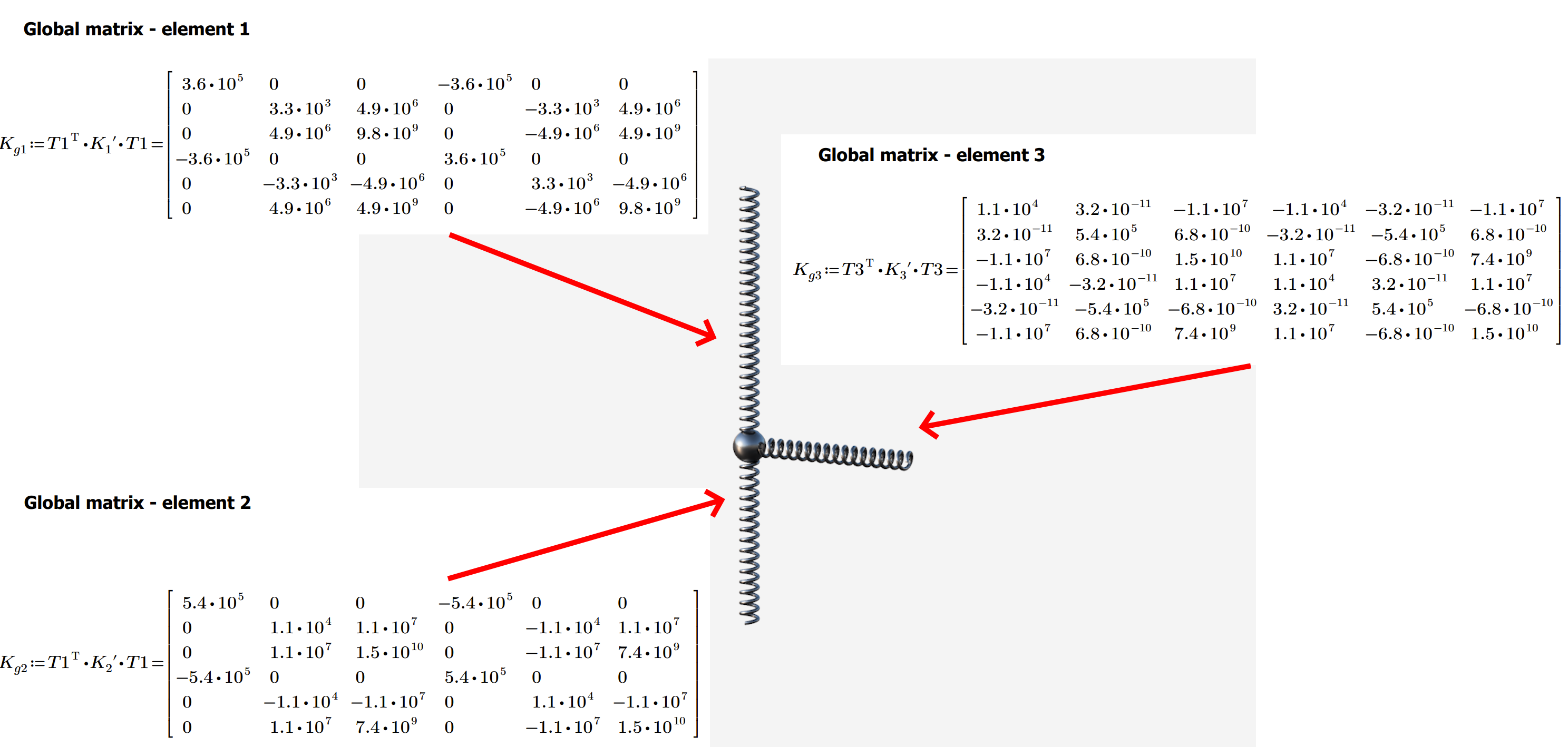
04) Matriz global elemento 1,2; Matriz global elemento 3
Matriz global - suma
Tiene cuatro nodos, y cada nodo tiene tres grados de libertad. Esto significa que la matriz resultante tiene dimensiones de 12x12. La parte crucial del proceso es sumar los valores en columnas y filas de las matrices individuales en la global.
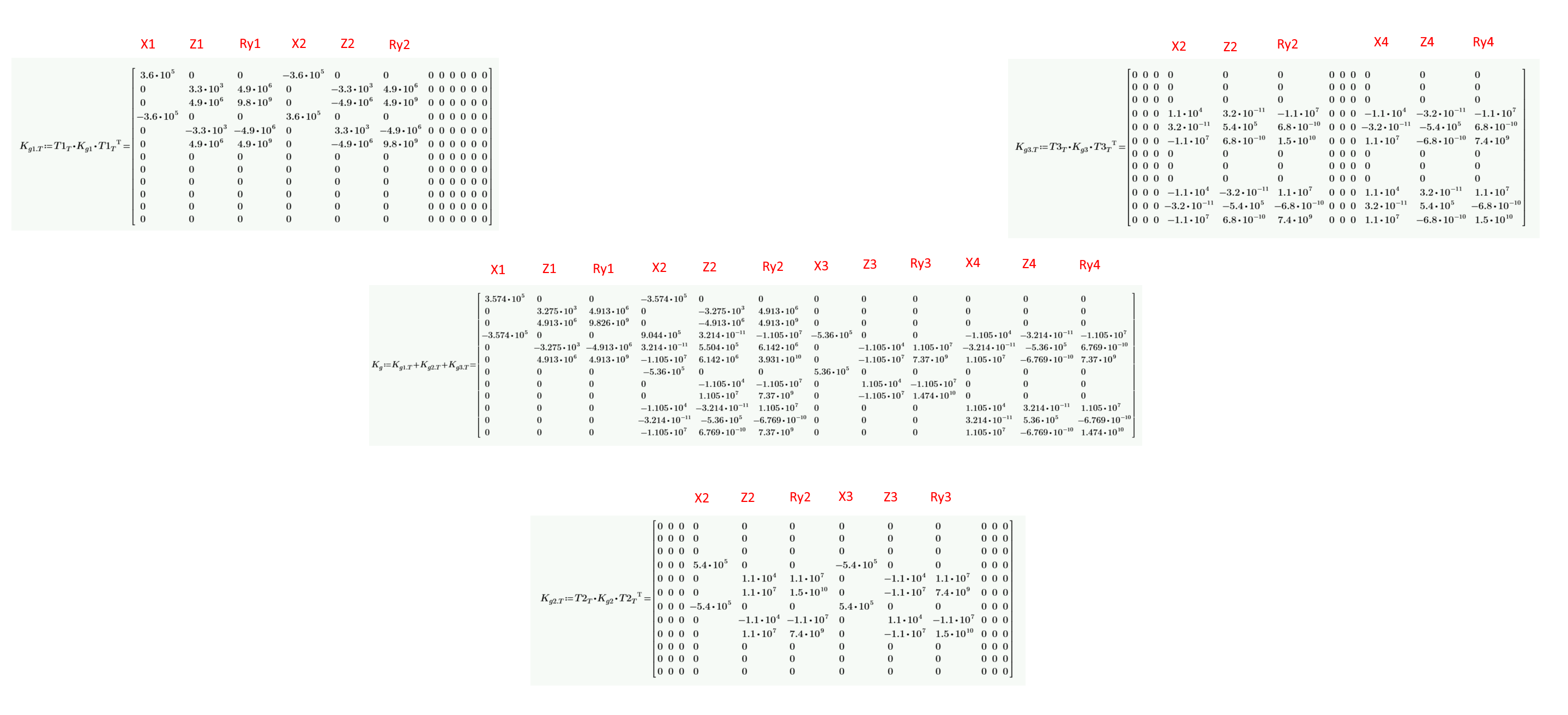
05) Matriz de rigidez global de todo el sistema
Condición de contorno y vector de cargas
Sin condiciones de contorno, el sistema está indeterminado (y solo se puede obtener la solución trivial). En este escenario, se consideran restricciones fijas en los nodos uno y tres. Los desplazamientos de contorno nulos (y rotaciones) pueden representarse eliminando las filas y columnas correspondientes. La solución es trivial si no se aplican fuerzas (desplazamientos nulos). En nuestro ejemplo, el nodo cuatro está sometido a una fuerza vertical de 50 kN.

06) Matriz reducida, vector de cargas y condiciones de contorno aplicadas
Solución
Teniendo en cuenta pequeñas deformaciones y material linealmente elástico, podemos resolver fácilmente el vector de desplazamientos desconocidos en un solo paso. Este enfoque es rápido y muy eficaz, lo que lo convierte en un método conveniente para abordar problemas relacionados con los desplazamientos.
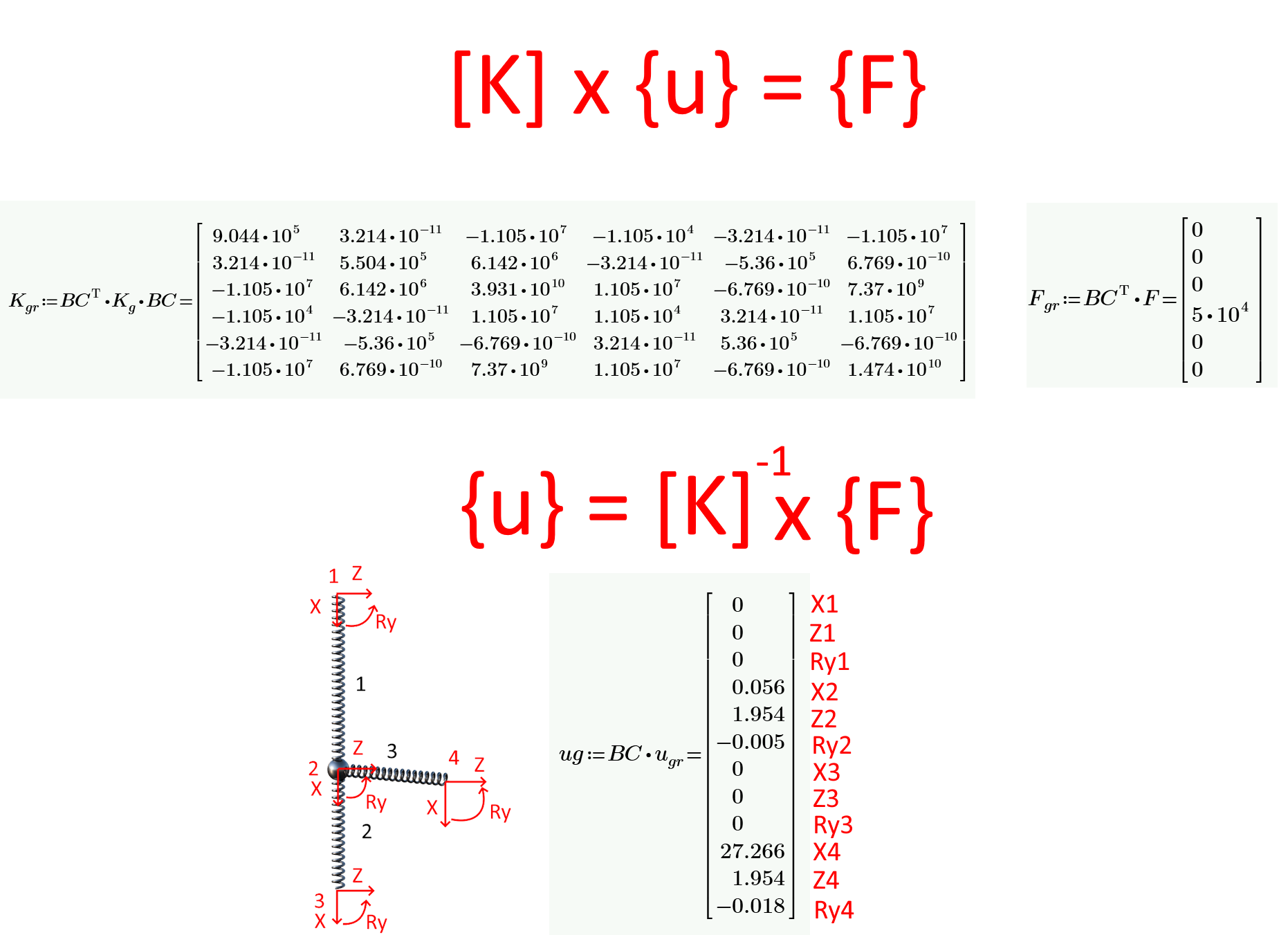
07) Desplazamiento nodal en GCS
Verificación por FEA
Dado que los valores proporcionados para los nodos son precisos, es imperativo que la salida del análisis por elementos finitos (FEA) corresponda exactamente con la del enfoque de rigidez directa (DSA). Este requisito garantiza que los resultados analíticos sean coherentes con el comportamiento real del sistema estudiado. Por lo tanto, es crucial asegurarse de que las salidas del FEA y del DSA coincidan entre sí dentro del nivel de tolerancia aceptable.
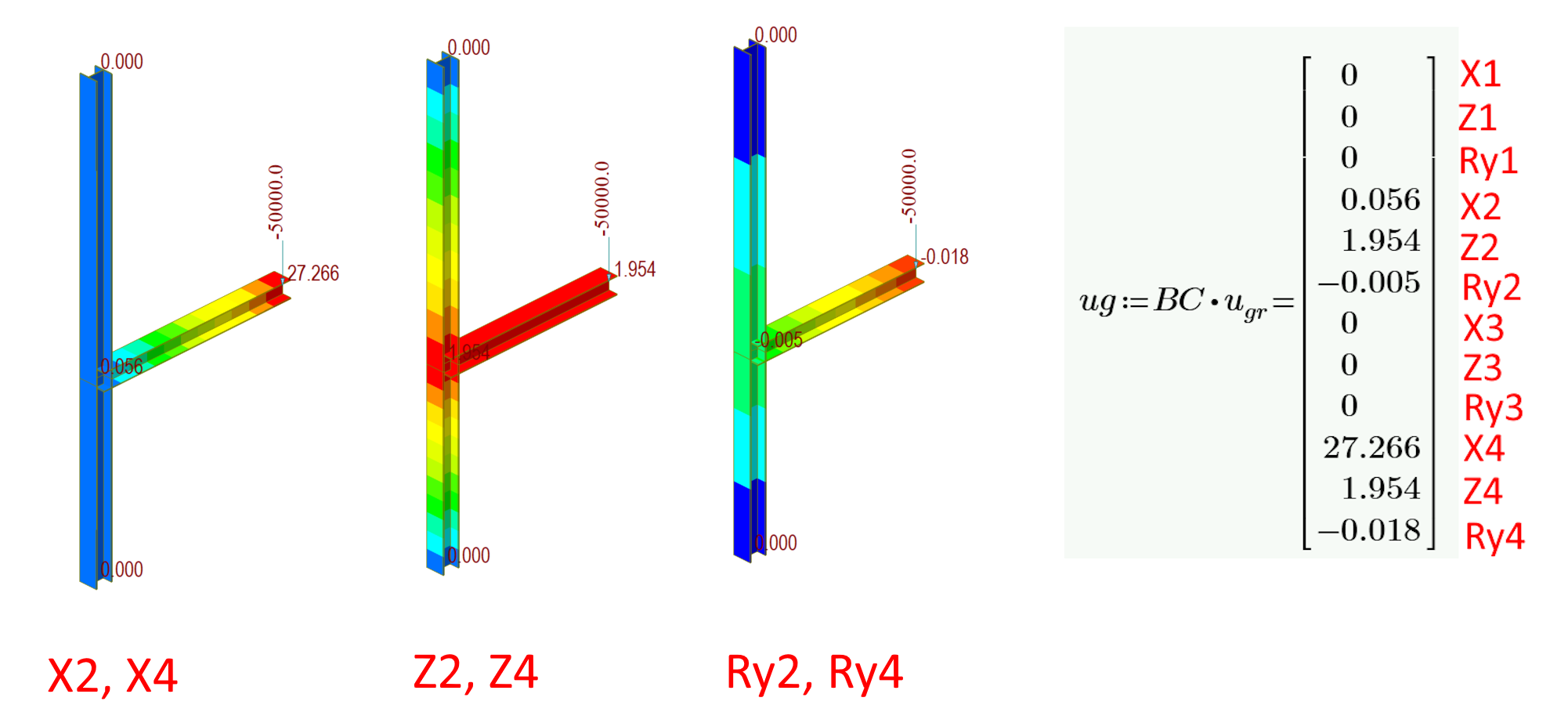
08) Verificación y comparación del desplazamiento nodal entre DSA y FEA
Enfoque de rigidez directa – uniones semirrígidas
Comprender que las uniones son típicamente semirrígidas y no completamente rígidas o articuladas es fundamental. Ignorar la rigidez de una unión podría resultar en que el comportamiento de una estructura en un modelo sea diferente al de una estructura real. Profundicemos en cómo se tiene en cuenta la rigidez durante los cálculos y cómo afecta al comportamiento de la propia estructura.
Muelle rotacional y estructuras civiles
Las estructuras civiles de acero, como naves y pórticos, están diseñadas para soportar cargas de flexión transferidas eficientemente por las vigas. Cuando la viga está cargada y la estructura es hiperestática, la rigidez rotacional de la junta desempeña un papel crucial para garantizar una correcta redistribución de cargas y una deformación precisa. Por eso es importante mantener la integridad estructural de la junta para prevenir cualquier daño potencial a la estructura.
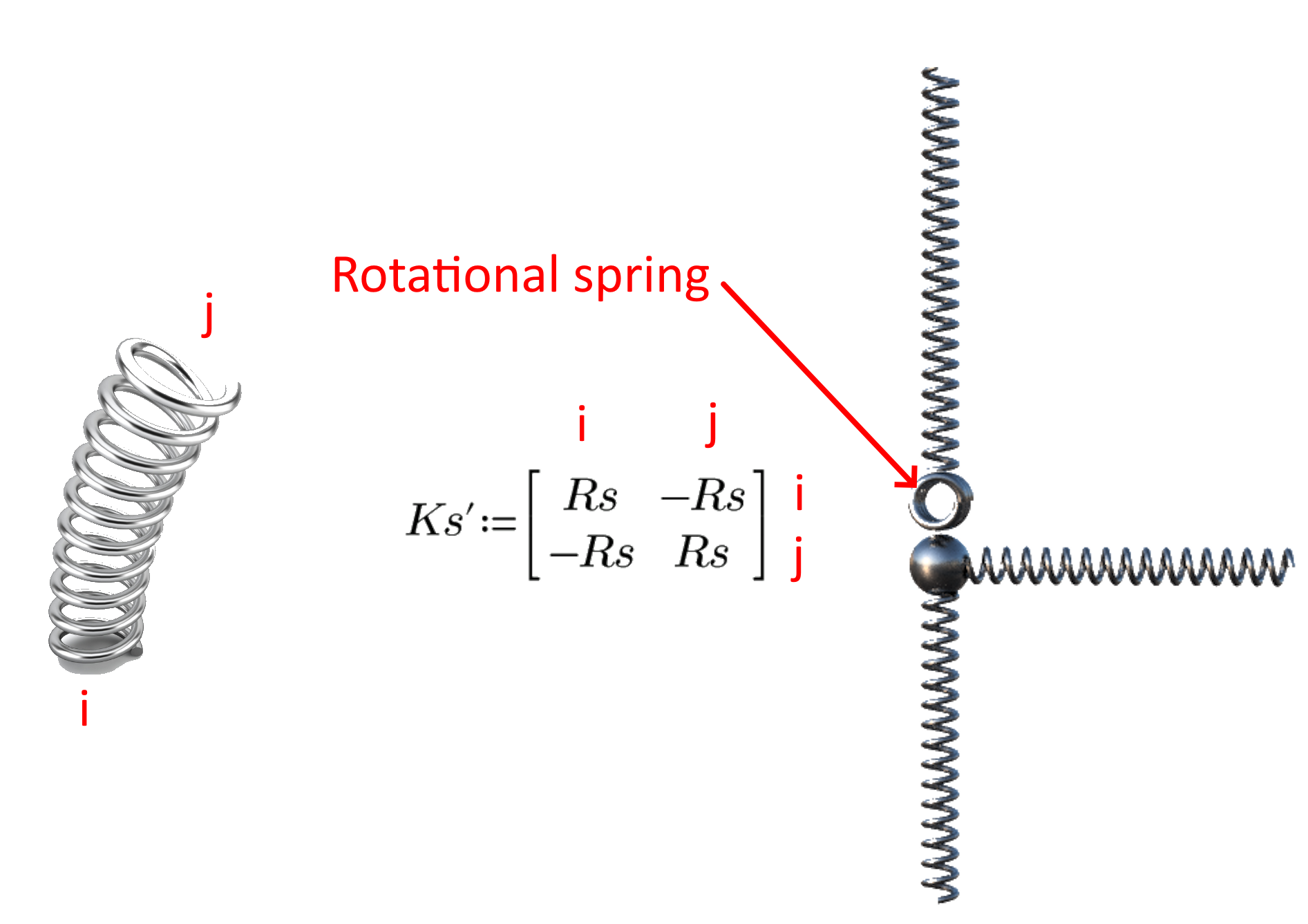
09) Muelle rotacional - matriz local
Para garantizar la compatibilidad en una junta, es importante acoplar las deformaciones. Este acoplamiento debe incluirse en la matriz de rigidez global para calcular las deformaciones. Cuando se aplica rigidez rotacional, otros grados de libertad deben incluirse como otra fila y columna en la matriz de rigidez global. La matriz final para este tipo de junta tendrá una dimensión de 13x13, mientras que una matriz de unión rígida tendrá una dimensión de 12x12.
Impacto de la rigidez rotacional
La rigidez rotacional de una estructura tiene un impacto significativo en cómo se distribuyen las fuerzas y se producen las deformaciones. Esto significa que una estructura con rigidez rotacional se comportará de manera diferente a una estructura con uniones rígidas o articuladas. Si la rigidez aumenta de forma desproporcionada, puede provocar cambios adicionales en el comportamiento de la estructura. En este escenario, exploraremos los efectos del aumento de la rigidez rotacional. El modelo con el que trabajamos es del capítulo anterior, y el muelle rotacional está unido al extremo (j) del elemento uno.
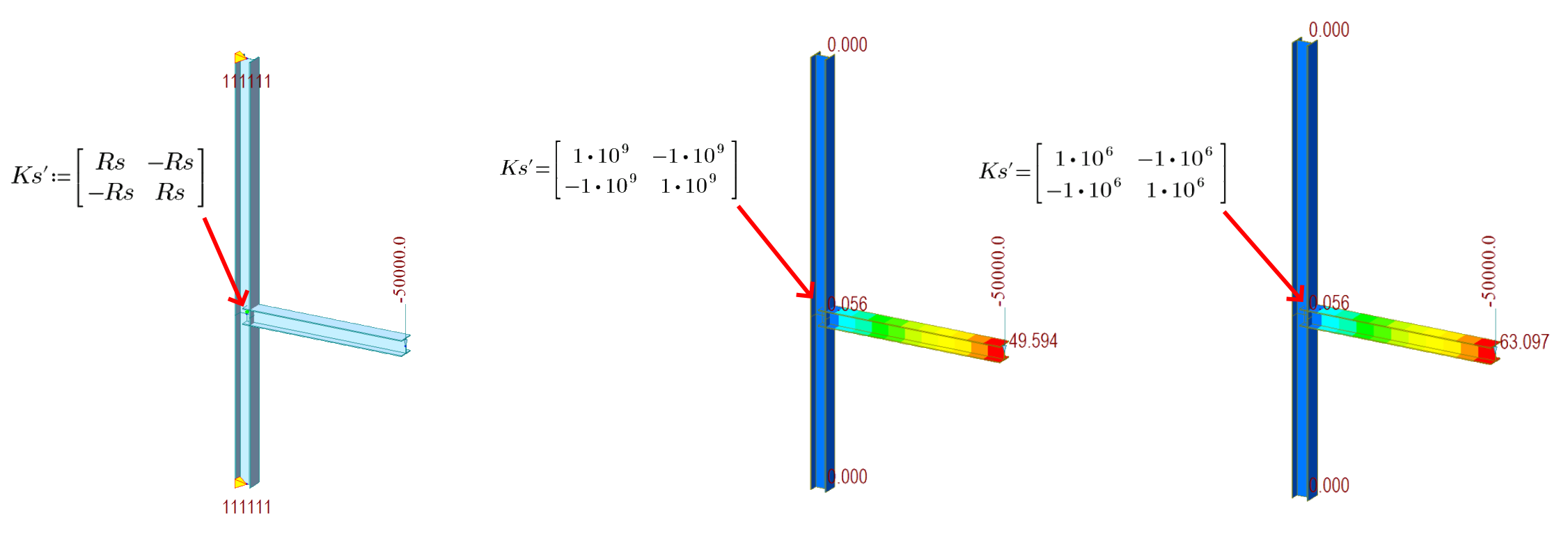
10) Deformaciones para diferentes rigideces rotacionales
El gráfico indica que, en ciertos rangos de rigidez, la deformación cambia de manera multilineal para una unión semirrígida. Para las uniones semirrígidas, subestimar o sobreestimar la rigidez conduce a diferencias significativas en las flechas y en la redistribución de los esfuerzos internos.
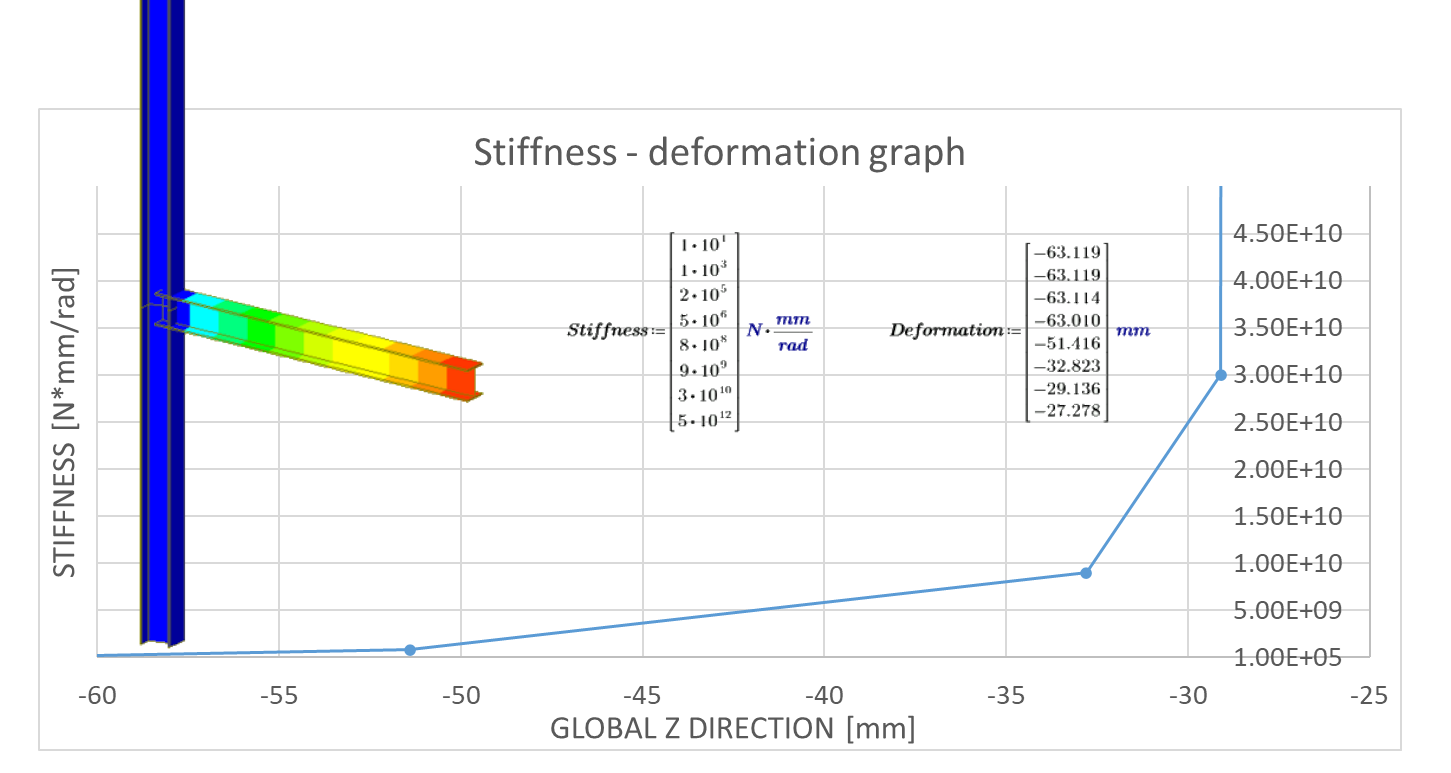
11) Gráfico rigidez – deformación
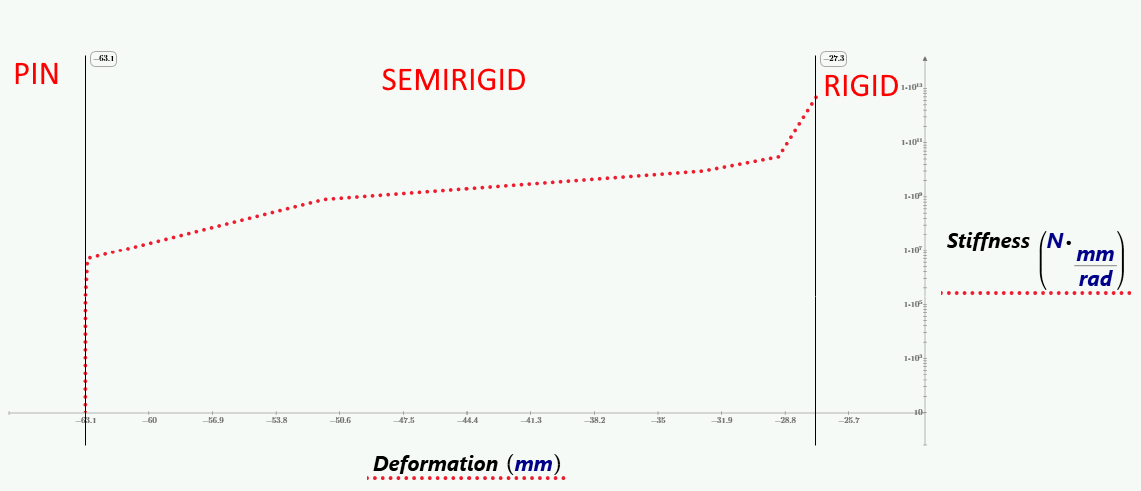
12) Zona de rigidez para uniones
Conclusión y próximos temas
Para garantizar el éxito de nuestro próximo estudio, primero debe adquirir una comprensión profunda del problema en cuestión. Solo entonces podrá avanzar con confianza y propósito. Nuestro estudio está dedicado a explorar una serie de temas importantes que son relevantes para el problema que estamos investigando. A través de una investigación y análisis cuidadosos, esperamos arrojar nueva luz sobre este problema complejo y desafiante, y en última instancia contribuir a una mejor comprensión de esta importante área de estudio.
- Cómo se calcula la rigidez rotacional en IDEA StatiCa
- Cómo utilizar la rigidez para múltiples elementos en una herramienta de FEA
- Verificación de la rigidez rotacional entre IDEA StatiCa y ABAQUS para una unión placa a placa
Prueba IDEA StatiCa gratis

