로봇 팔 받침대에 대한 구조 엔지니어링 컨설팅
프로젝트 소개
이 프로젝트는 기계 및 구조 엔지니어링의 시너지를 기반으로 하며, 상단 운동학적 로봇 팔은 기계 엔지니어 그룹이 설계, 분석 및 검토했습니다. 수석 엔지니어인 Jakub Čech이 강구조 팀을 담당하며, 다른 다섯 명의 구조 엔지니어가 계산을 수행했습니다.

Czech Republic
로봇 팔은 기계 팔의 일종으로, 일반적으로 프로그래밍 가능하며 인간의 팔과 유사한 기능을 수행합니다. 팔은 메커니즘의 전체를 구성하거나 더 복잡한 로봇의 일부가 될 수 있습니다. 이러한 매니퓰레이터의 링크는 관절로 연결되어 회전 운동(예: 관절형 로봇) 또는 병진(선형) 변위를 가능하게 합니다.
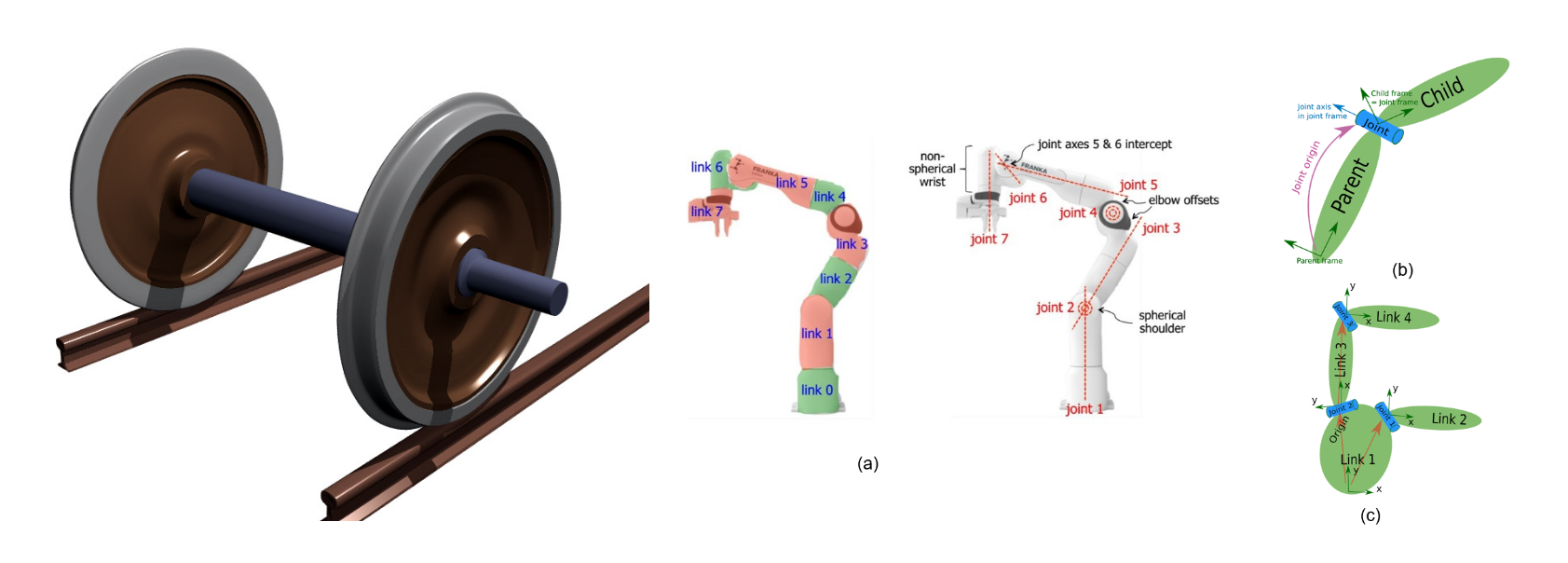
그림 설명: 열차용 휠셋과 로봇 팔 운동의 운동학적 원리
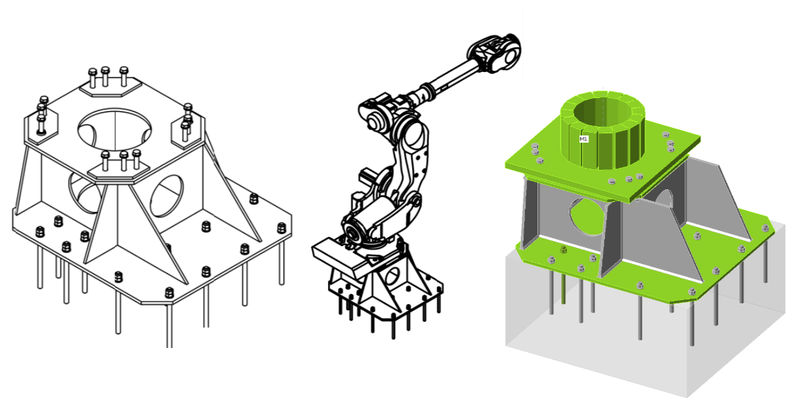
강재 받침대 & IDEA StatiCa
모델의 기계 부분은 조립 중 올바른 조작을 위해 변형을 최소화하도록 강체 받침대에 고정되어야 합니다. 이로 인해 정밀한 설계, 분석 및 규정 검토가 필요합니다. 플레이트, 볼트, 용접 등 기계 부품의 지지를 형성하는 모든 구성 요소는 하부 구조의 공간적 강성을 확보하며, 정밀한 분석이 필요합니다.
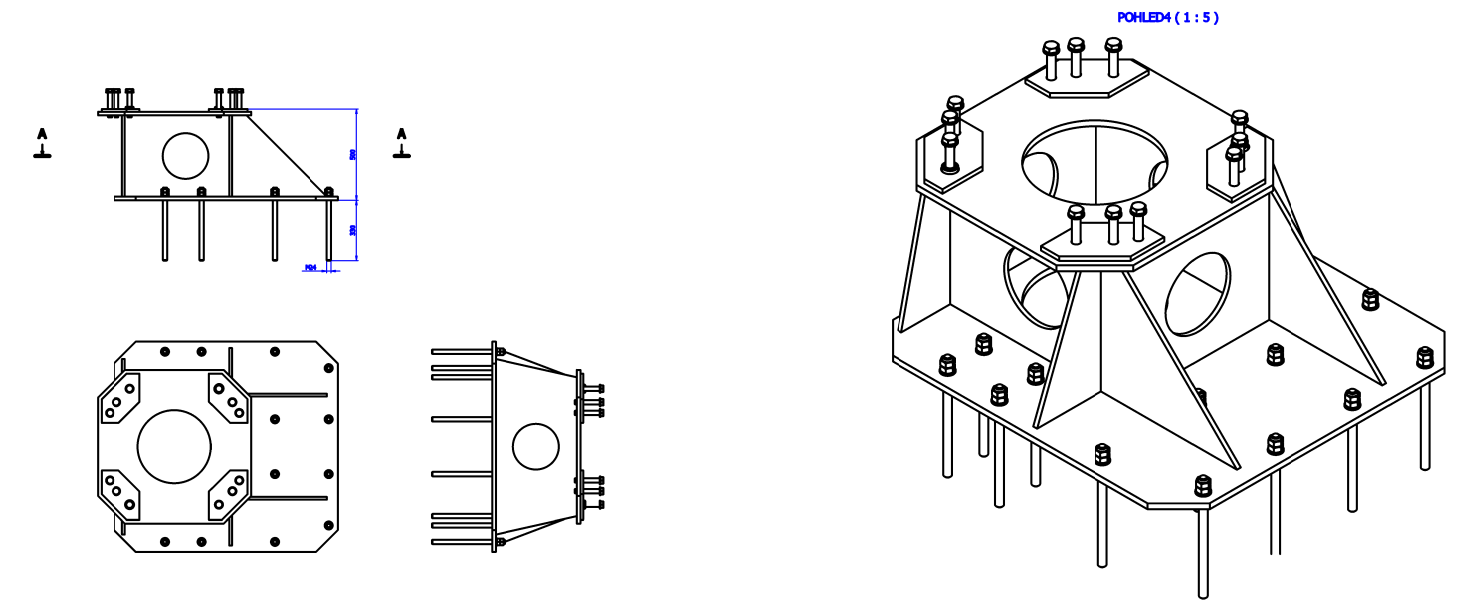
로봇 팔 받침대 도면
물품, 제품, 패키지 등의 조작(집기/내려놓기)으로 인해 힘이 시간에 따라 변화합니다. 정적 힘 외에도 원심력/관성력이 포함되었습니다. 이러한 힘은 운동의 각속도에 엄격하게 의존합니다. 받침대의 설계 및 규정 검토는 힘의 임계 조합을 고려합니다. 힘은 강체 동역학 시뮬레이션에서 도출됩니다.
모델은 콘크리트 블록에 정착된 베이스 플레이트로 조립됩니다. 개구부가 있는 받침대 박스는 용접 스티프너를 사용하여 보강됩니다. 모델은 공간적 안정성과 강성을 확보합니다. 정착 모델의 복잡성은 솔리드 뷰와 투명 뷰 모두에서 확인할 수 있습니다.
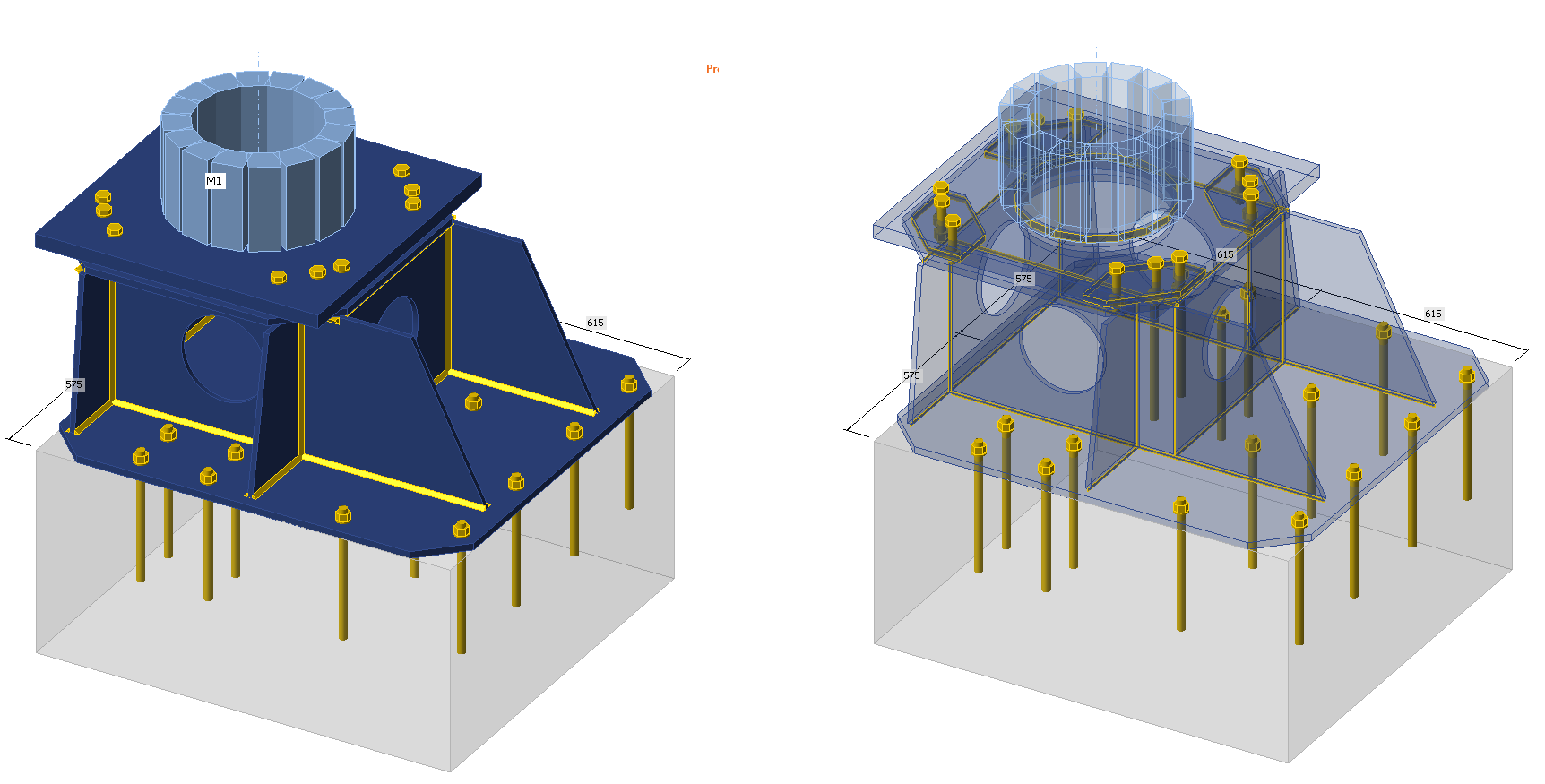
모델 및 각 구성 요소의 솔리드 뷰와 투명 뷰
Czech Republic
IDEA StatiCa Connection의 고급 모델링 기법과 강력한 솔버 엔진을 통해 재료 비선형 해석을 사용하여 모델의 응력-변형률을 분석했습니다.
결과 및 규정 검토
설계 및 규정 검토는 유로코드의 모든 요구 사항을 충족합니다.
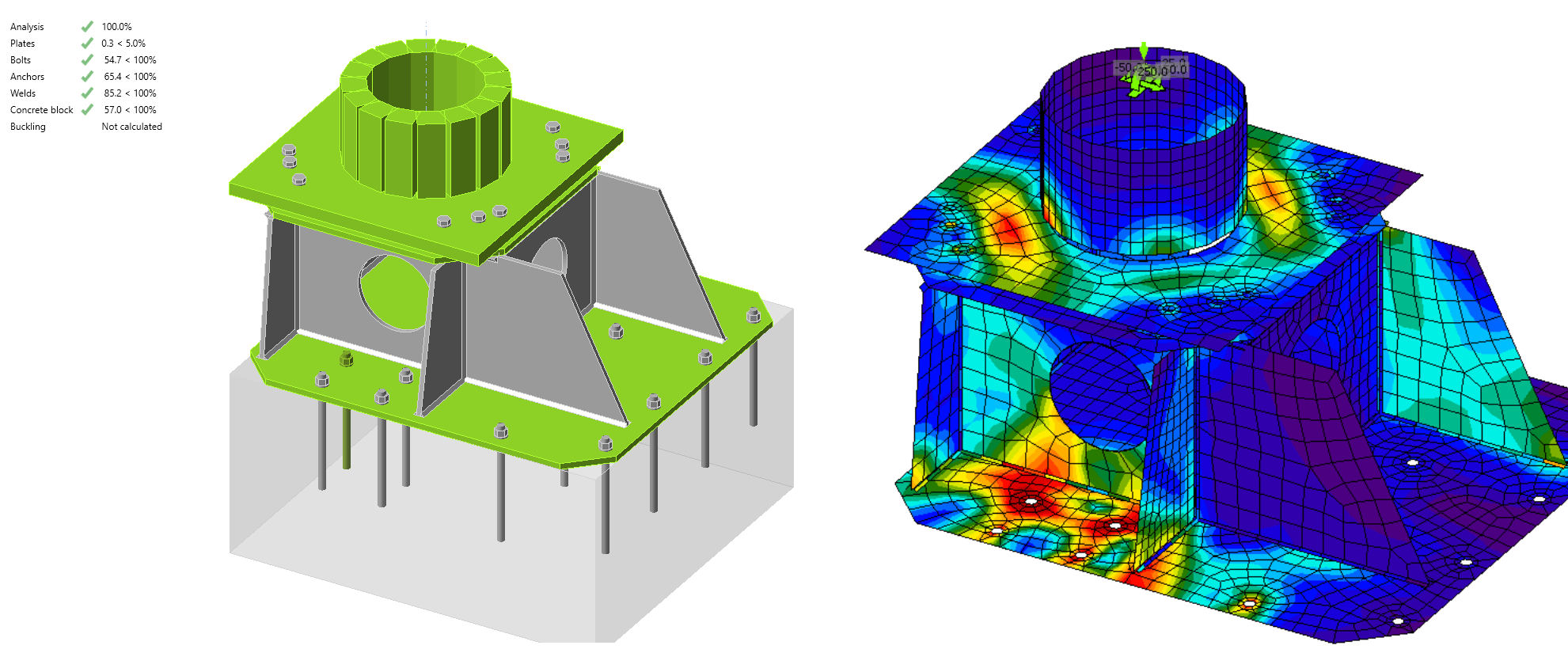
각 구성 요소의 이용률 및 Von-Mises 응력
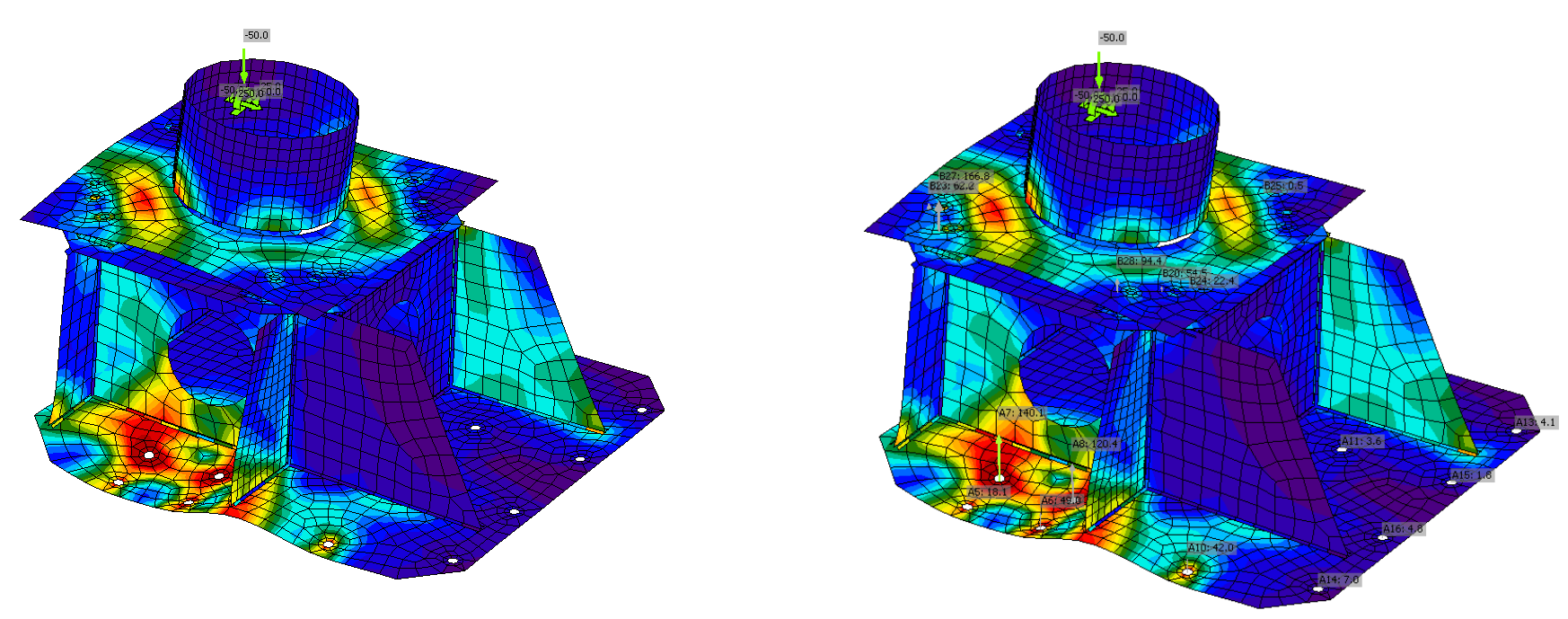
변형 및 앵커 내 힘의 확대
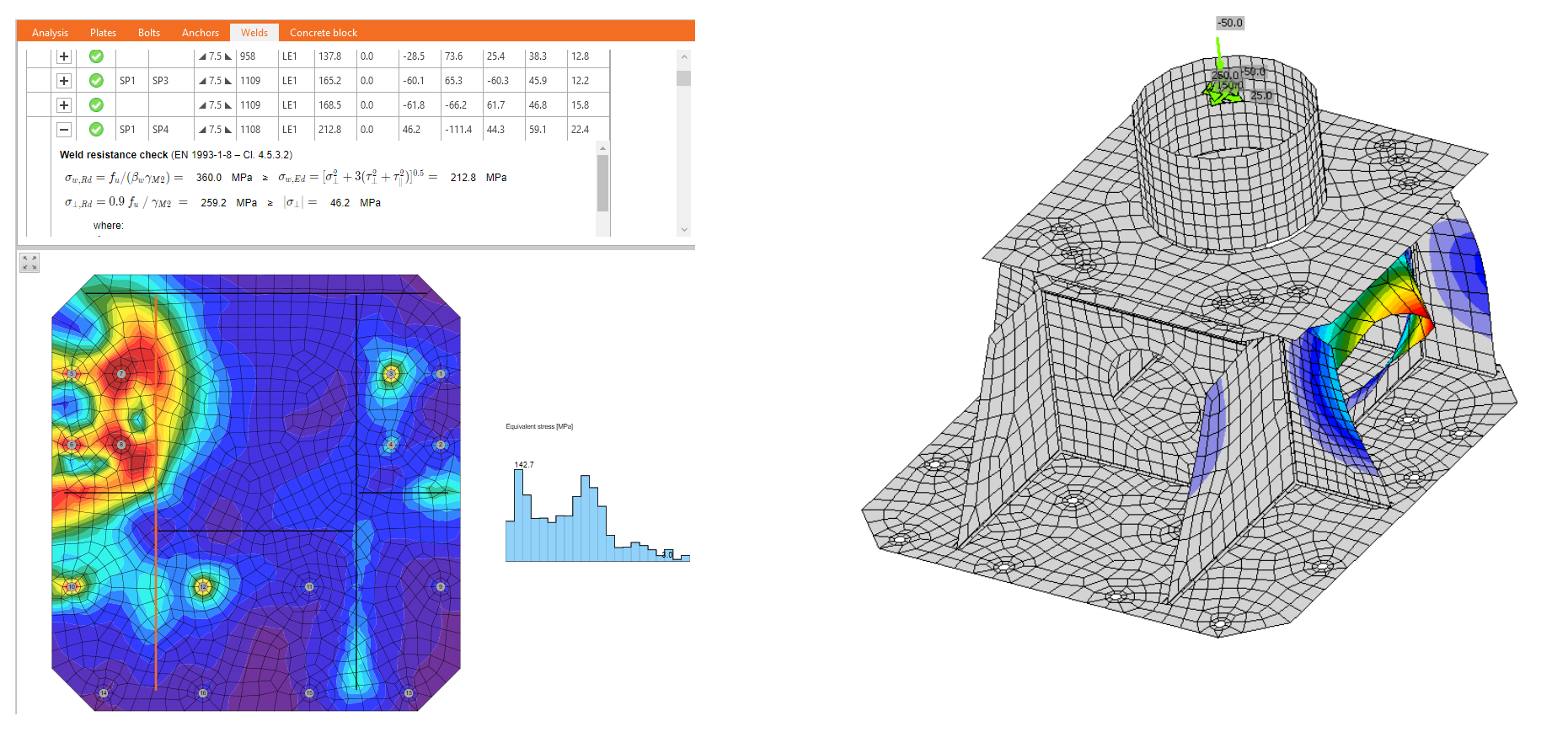
용접부 응력 및 첫 번째 좌굴 형상
결론
IDEA StatiCa는 BKB Metal과 긴밀히 협력하여 모델링 접근 방식에 대한 상세한 설명과 주석이 달린 결과물을 포함한 모델을 제공했습니다. IDEA StatiCa 엔지니어링 컨설팅은 엔지니어링 프로젝트에 필요한 전문 지식과 지침을 기업에 제공하고, 설계 및 시공 요구 사항을 최적으로 충족하는 방법에 대해 고객에게 조언합니다.
Czech Republic
복잡한 받침대는 모든 임계 하중 조합을 전달하며 유로코드에 따른 기준을 충족합니다. 모델은 설계의 모든 측면을 검증하기 위해 응력-변형률 및 좌굴 해석을 수행했습니다. IDEA StatiCa Connection 앱은 기계 엔지니어링 분야에서도 큰 잠재력을 가지며, 기계 로봇 팔 받침대의 설계 및 규정 검토 소프트웨어로 활용될 수 있습니다.
Jakub Čech과 그의 팀의 피드백은 매우 긍정적이었습니다. 이로 인해 BKB Metal과 IDEA StatiCa 모두 결과에 만족하고 있습니다.
IDEA StatiCa 엔지니어링 컨설팅에 대해 더 알아보려면 현지 리셀러 또는 IDEA StatiCa 지역 사무소에 문의하시기 바랍니다.
