Consultanță de inginerie pentru un piedestal pentru un braț robotic
Despre proiect
Proiectul se bazează pe o sinergie între ingineria mecanică și cea structurală, brațul robotic cinematic superior fiind proiectat, analizat și verificat de un grup de ingineri mecanici. Inginerul principal, Jakub Čech, coordonează echipa de oțel, în cadrul căreia alți cinci ingineri structuriști au efectuat calculele.

Czech Republic
Un braț robotic este un tip de braț mecanic, de obicei programabil, cu funcții similare unui braț uman. Brațul poate reprezenta totalitatea mecanismului sau poate face parte dintr-un robot mai complex. Legăturile unui astfel de manipulator sunt conectate prin rosturi, permițând fie mișcarea de rotație (ca în cazul unui robot articulat), fie deplasarea translațională (liniară).
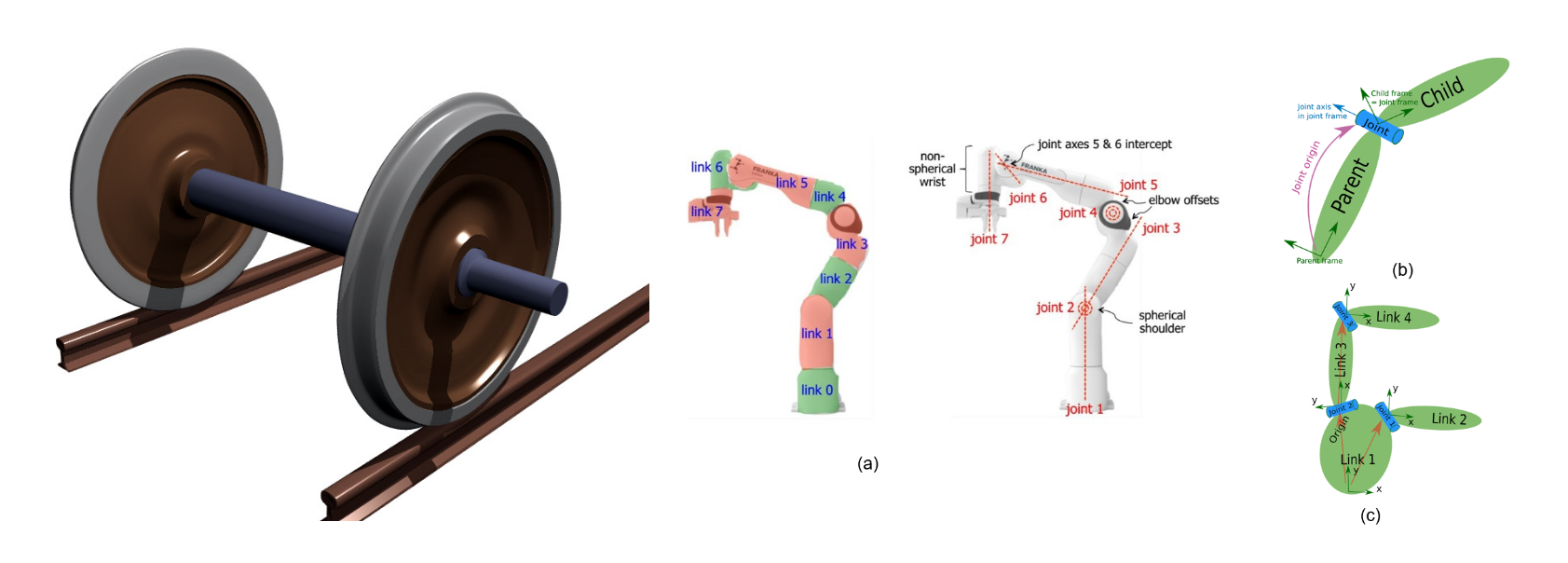
Figură ilustrativă: osie pentru trenuri și cinematica mișcării brațului robotic
Piedestal metalic & IDEA StatiCa
Partea mecanică a modelului trebuie fixată pe un piedestal rigid pentru a minimiza deformațiile și a asigura o manipulare corectă în timpul asamblării. Aceasta conduce la necesitatea unui proiect precis, a unei analize riguroase și a verificării conform codului. Toate componentele care formează împreună suportul pieselor mecanice, precum plăcile, șuruburile și sudurile, asigură rigiditatea spațială a substructurii și necesită o analiză precisă.
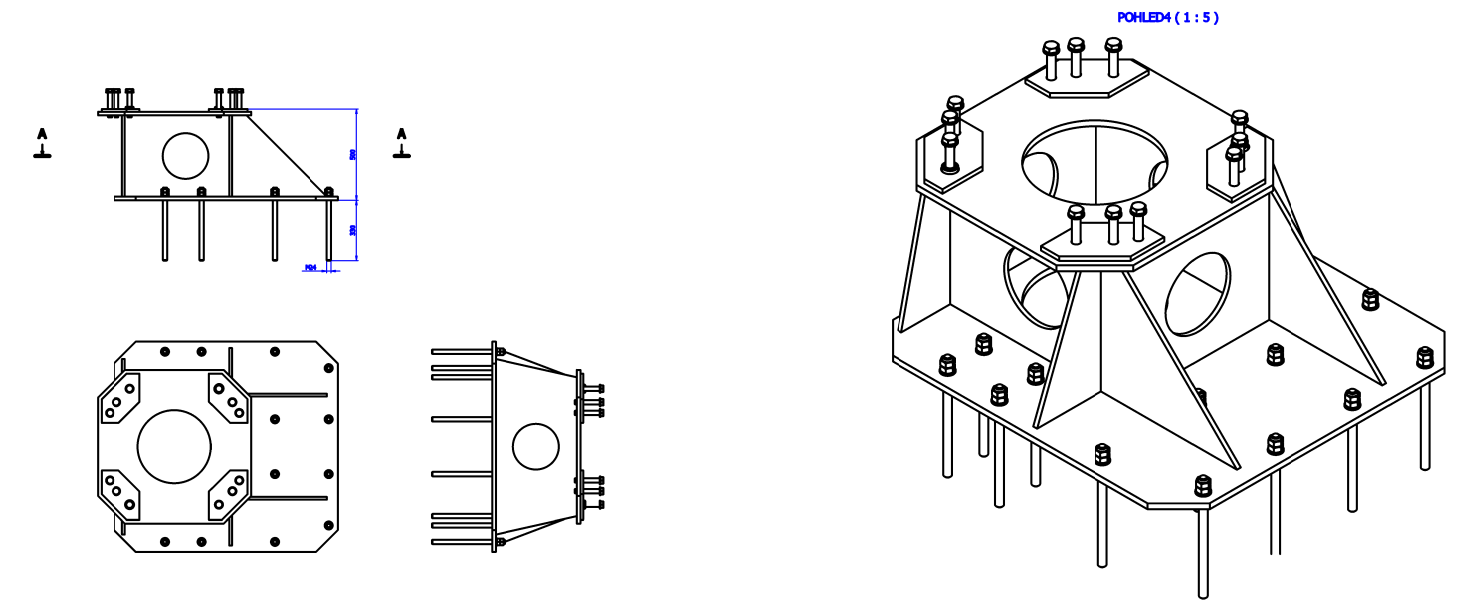
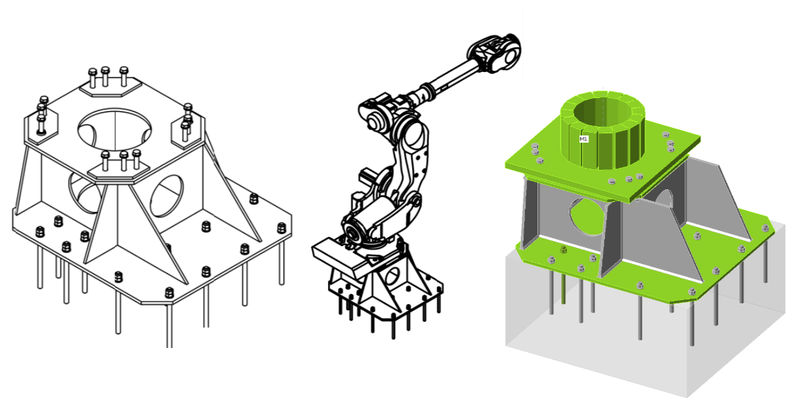
Desen al piedestalului pentru brațul robotic
Datorită manipulării (ridicare/depunere) a mărfurilor, obiectelor, pachetelor etc., forțele se modifică în timp. Forțele centrifuge/de inerție au fost incluse, pe lângă forțele statice. Aceste forțe depind strict de viteza unghiulară a mișcării. Proiectarea și verificarea conform codului a piedestalului iau în considerare combinațiile critice ale forțelor. Forțele sunt derivate dintr-o simulare a dinamicii corpului rigid.
Modelul este asamblat dintr-o placă de bază ancorată într-un bloc de beton. Cutia piedestalului cu deschideri este rigidizată cu ajutorul unor elemente de rigidizare sudate. Modelul asigură stabilitatea și rigiditatea spațială. Complexitatea modelului de ancorare poate fi observată atât în vedere solidă, cât și în vedere transparentă.
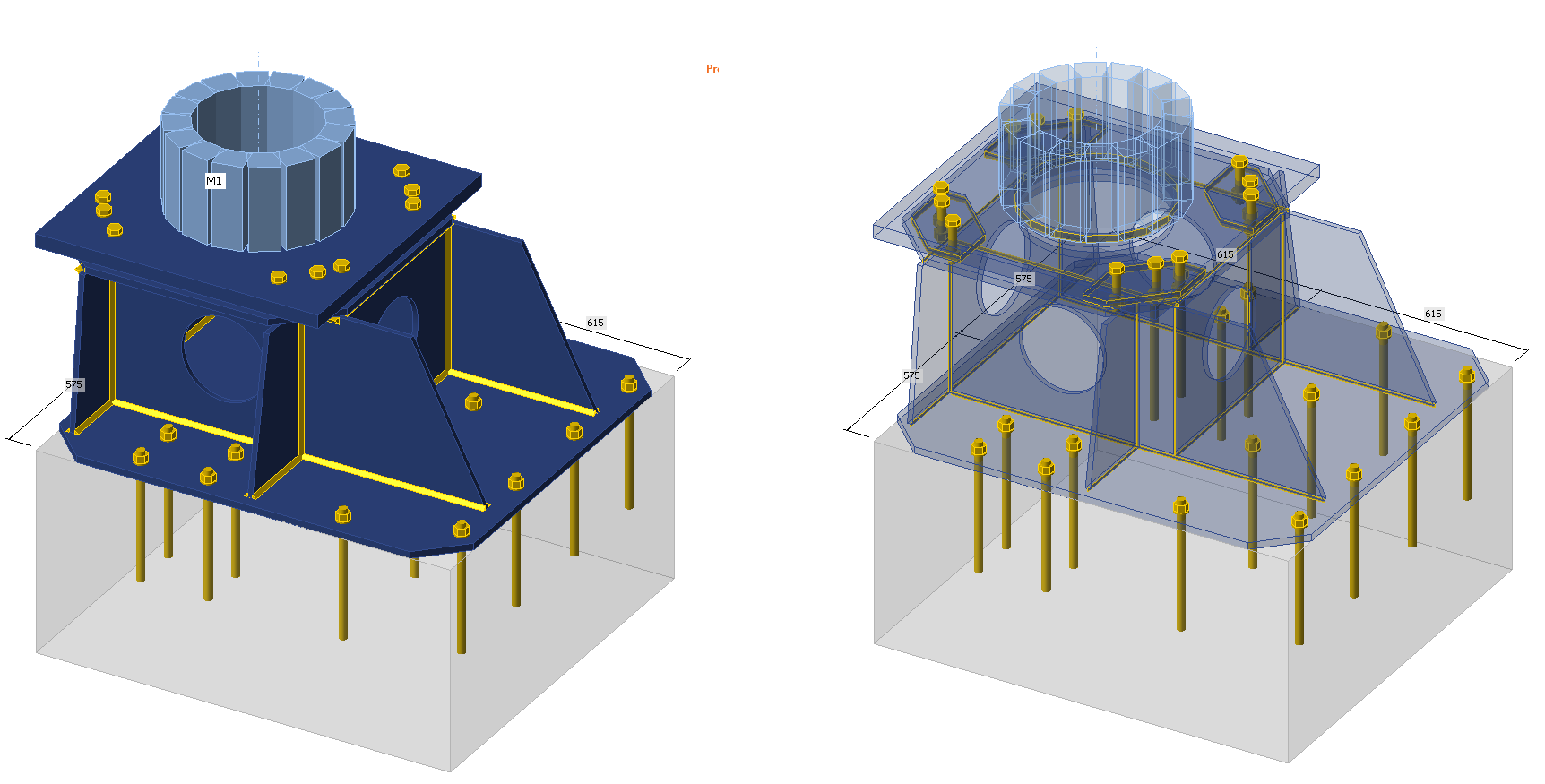
Vederi solide și transparente ale modelului și ale fiecărei componente
Czech Republic
Datorită tehnicilor avansate de modelare și a motorului de calcul puternic din spatele IDEA StatiCa Connection, am analizat efortul-deformația pe model utilizând analiza neliniară materială.
Rezultate și verificarea conform codului
Proiectarea și verificarea conform codului îndeplinesc toate cerințele Eurocodului.
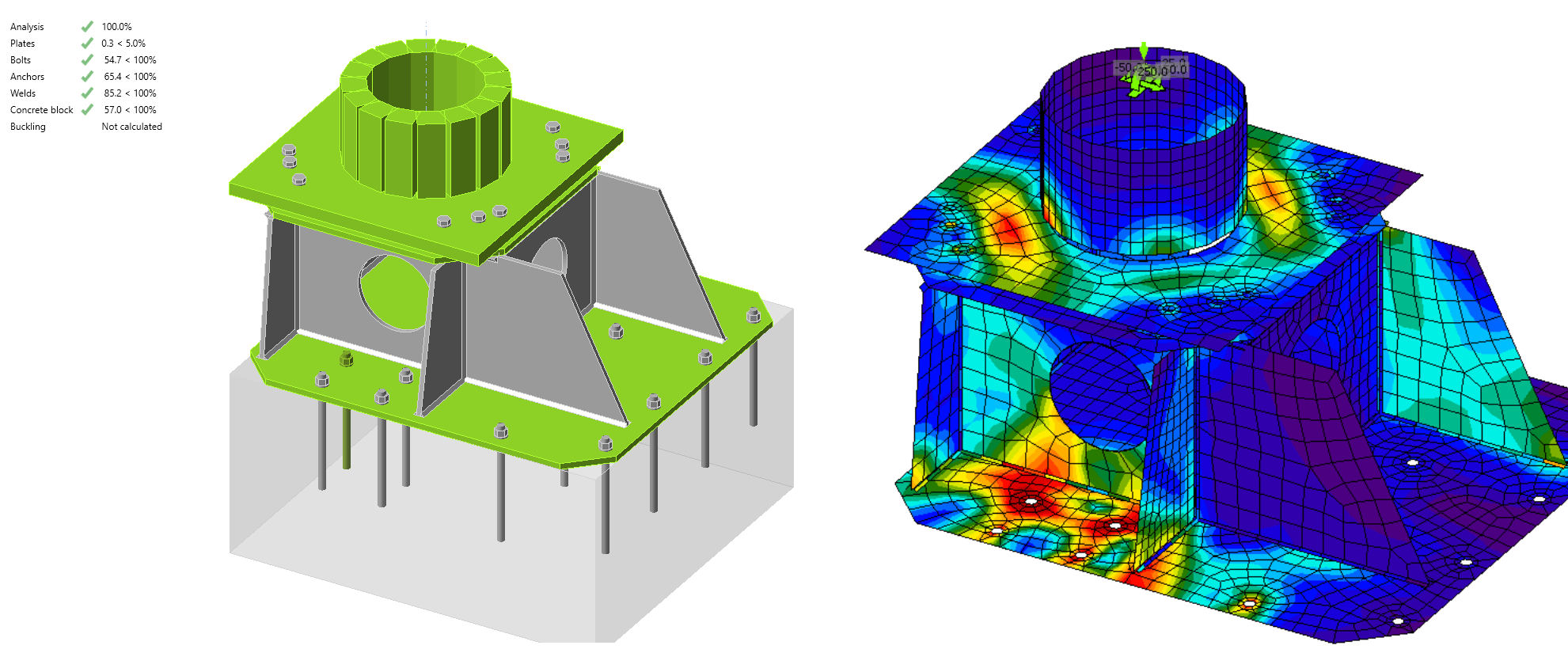
Gradul de utilizare al fiecărei componente și tensiunea Von Mises
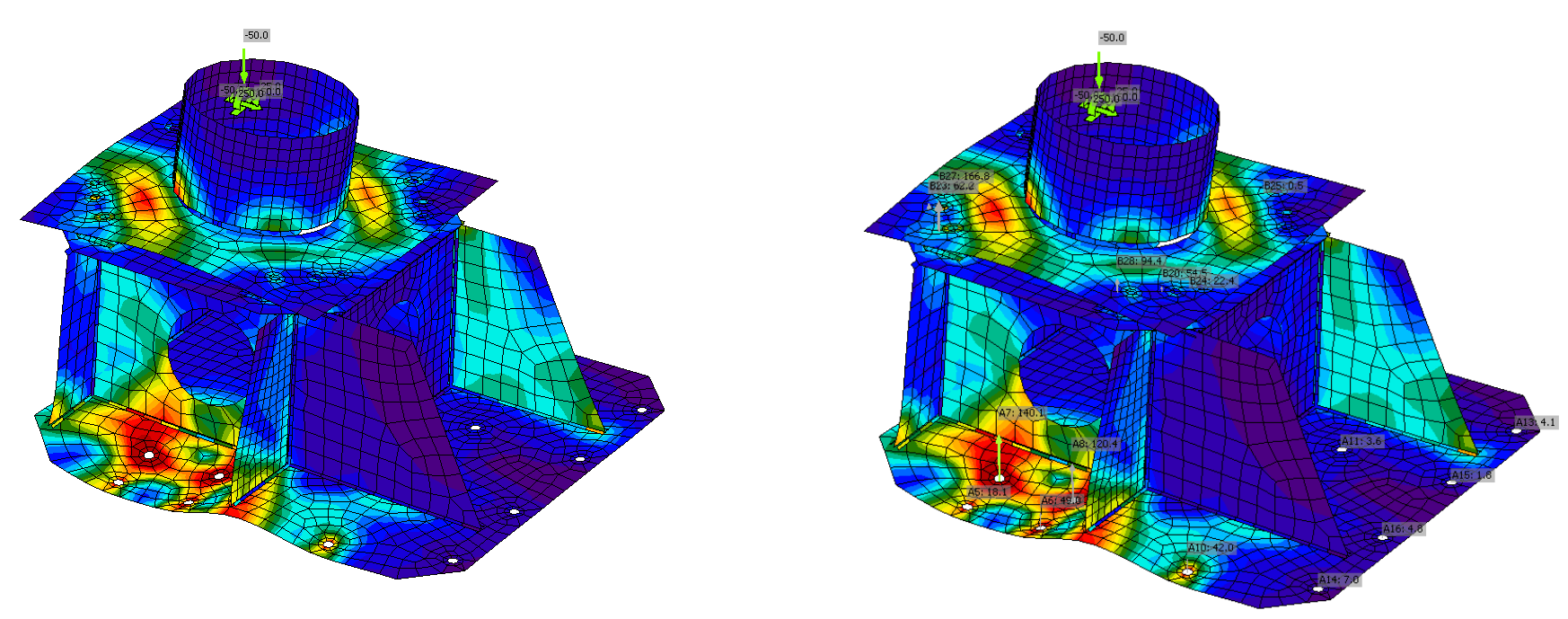
Scalarea deformației și a forțelor în ancore
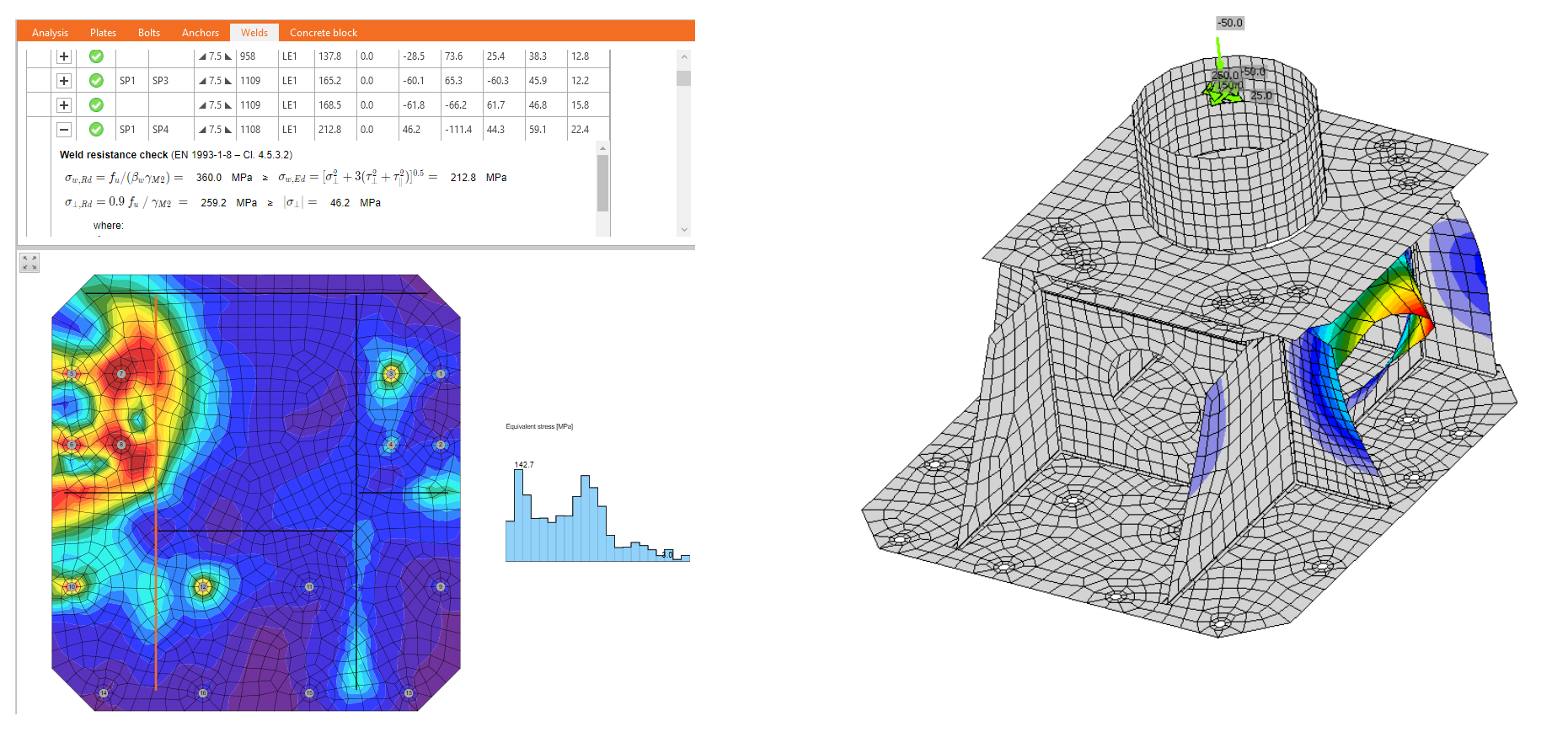
Tensiunea în suduri și prima formă de flambaj
Concluzie
IDEA StatiCa, în strânsă colaborare cu BKB Metal, a livrat modelul cu o descriere detaliată a abordării de modelare și a rezultatelor adnotate. Consultanța de Inginerie IDEA StatiCa oferă expertiză și îndrumare necesare companiilor în cadrul proiectelor de inginerie și consiliază clienții cu privire la modul optim de a răspunde cerințelor de proiectare și construcție.
Czech Republic
Piedestalul complex transferă toate combinațiile critice și îndeplinește criteriile conform Eurocod. Modelul a fost supus unei analize efort-deformație și de flambaj pentru a valida toate aspectele proiectului. Aplicația IDEA StatiCa Connection aduce, de asemenea, un potențial semnificativ în domeniul ingineriei mecanice, unde poate fi utilizată ca software pentru proiectarea și verificarea conform codului a piedestalelor pentru brațe robotice mecanice.
Feedback-ul lui Jakub Čech și al echipei sale a fost extrem de pozitiv. Aceasta a condus la satisfacția atât a BKB Metal, cât și a IDEA StatiCa față de rezultat.
Pentru mai multe informații despre Consultanța de Inginerie IDEA StatiCa, vă rugăm să contactați distribuitorul local sau biroul regional IDEA StatiCa.
Încercați IDEA StatiCa gratuit
