Ingénierie conseil pour un socle de bras robotique
À propos du projet
Le projet repose sur une synergie entre ingénierie mécanique et ingénierie structurelle, le bras robotique cinématique supérieur ayant été conçu, analysé et vérifié par un groupe d'ingénieurs mécaniciens. L'ingénieur principal, Jakub Čech, est responsable de l'équipe acier, au sein de laquelle cinq autres ingénieurs structure ont effectué les calculs.

Czech Republic
Un bras robotique est un type de bras mécanique, généralement programmable, aux fonctions similaires à celles d'un bras humain. Le bras peut constituer l'intégralité du mécanisme ou faire partie d'un robot plus complexe. Les segments d'un tel manipulateur sont reliés par des assemblages permettant soit un mouvement de rotation (comme dans un robot articulé), soit un déplacement translationnel (linéaire).
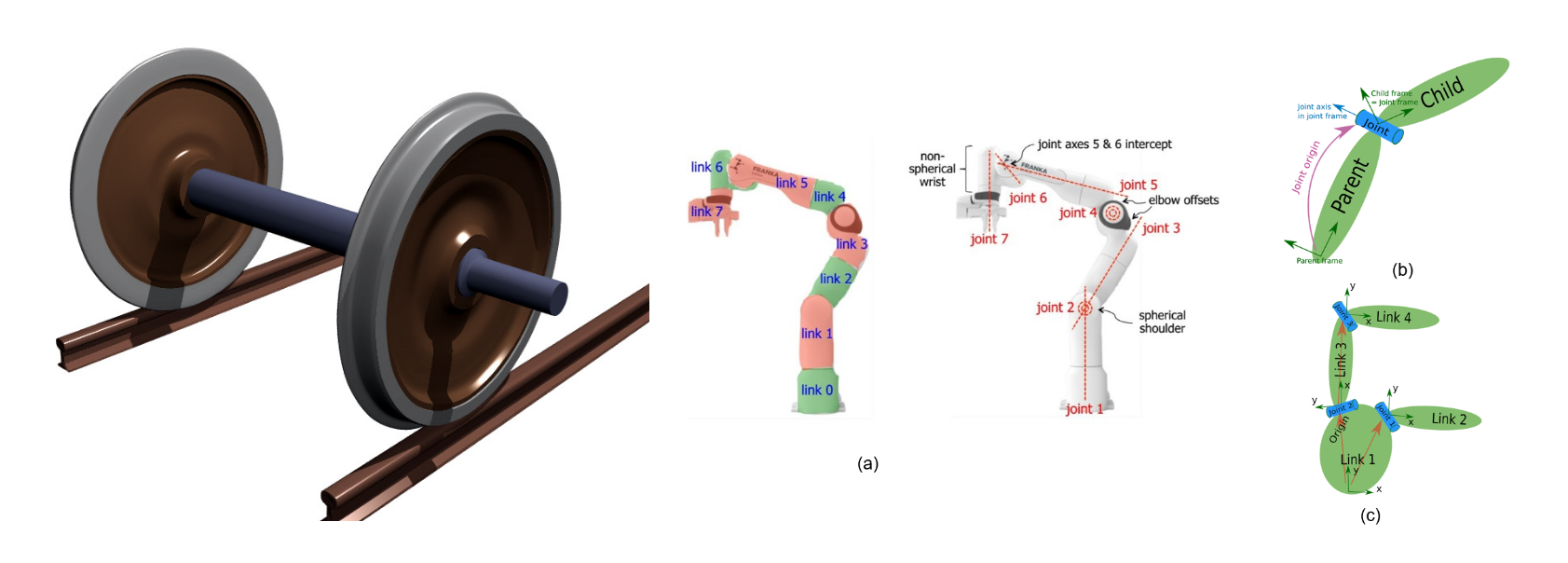
Figure illustrative : essieu de train et cinématique du mouvement du bras robotique
Socle acier & IDEA StatiCa
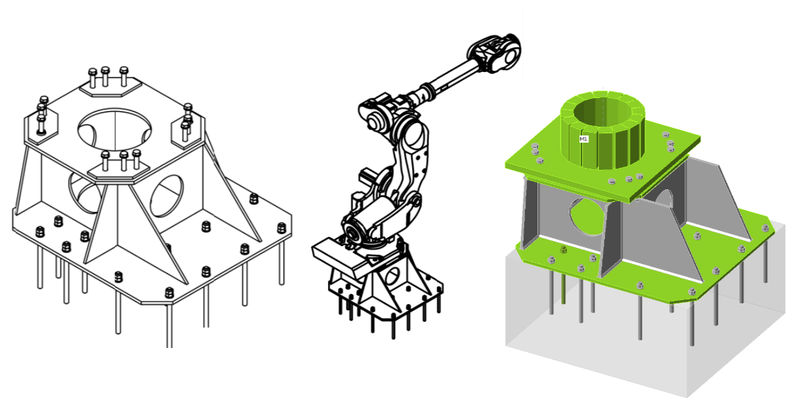
La partie mécanique du modèle doit être fixée à un socle rigide afin de minimiser les déformations pour une manipulation correcte lors du montage. Cela implique la nécessité d'une conception, d'une analyse et d'une vérification normative précises. Tous les composants qui forment ensemble le support des parties mécaniques, tels que les plaques, les boulons et les soudures, assurent la rigidité spatiale de la sous-structure et doivent être analysés avec précision.
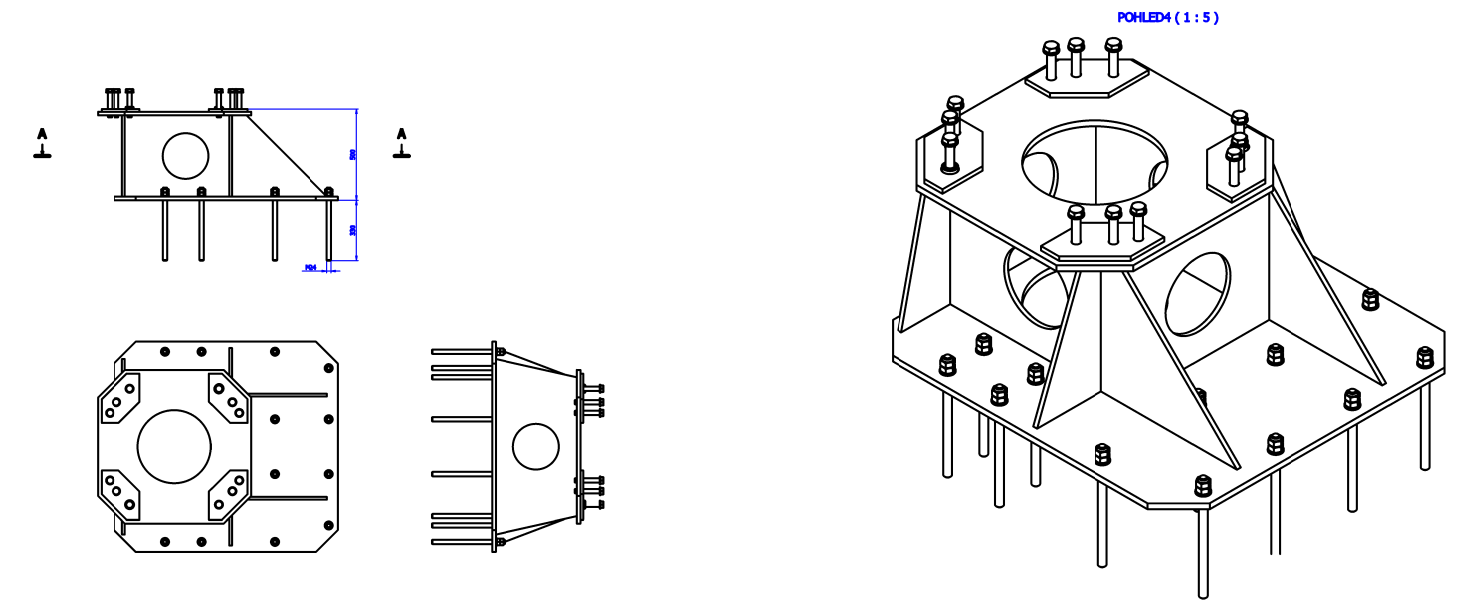
Plan du socle pour le bras robotique
En raison de la manipulation (prise/dépose) de marchandises, de pièces, de colis, etc., les forces varient dans le temps. Les forces centrifuges/inertielles ont également été prises en compte, en plus des forces statiques. Ces forces dépendent strictement de la vitesse angulaire du mouvement. La conception et la vérification normative du socle tiennent compte des combinaisons critiques de forces. Les forces sont déduites d'une simulation de dynamique des corps rigides.
Le modèle est assemblé à partir d'une platine de base ancrée dans un bloc de béton. Le caisson du socle avec ouvertures est renforcé par des raidisseurs soudés. Le modèle assure la stabilité et la rigidité spatiales. La complexité du modèle d'ancrage est visible en vue pleine et en vue transparente.
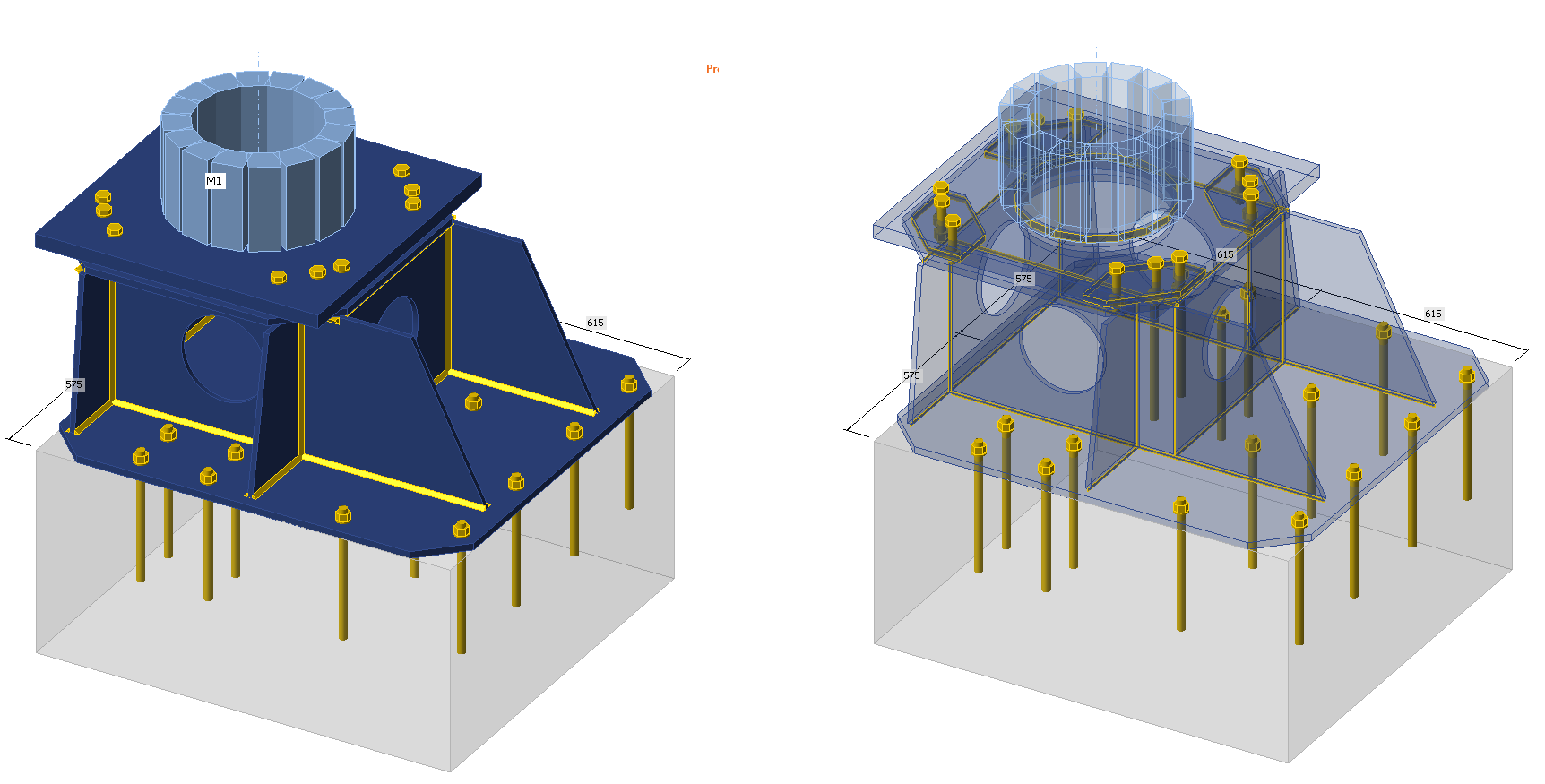
Vues pleine et transparente du modèle et de chaque composant
Czech Republic
Grâce aux techniques de modélisation avancées et au puissant moteur de calcul d'IDEA StatiCa Connection, nous avons analysé la contrainte-déformation du modèle à l'aide d'une analyse non linéaire matérielle.
Résultats et vérification normative
La conception et la vérification normative satisfont à toutes les exigences de l'Eurocode.
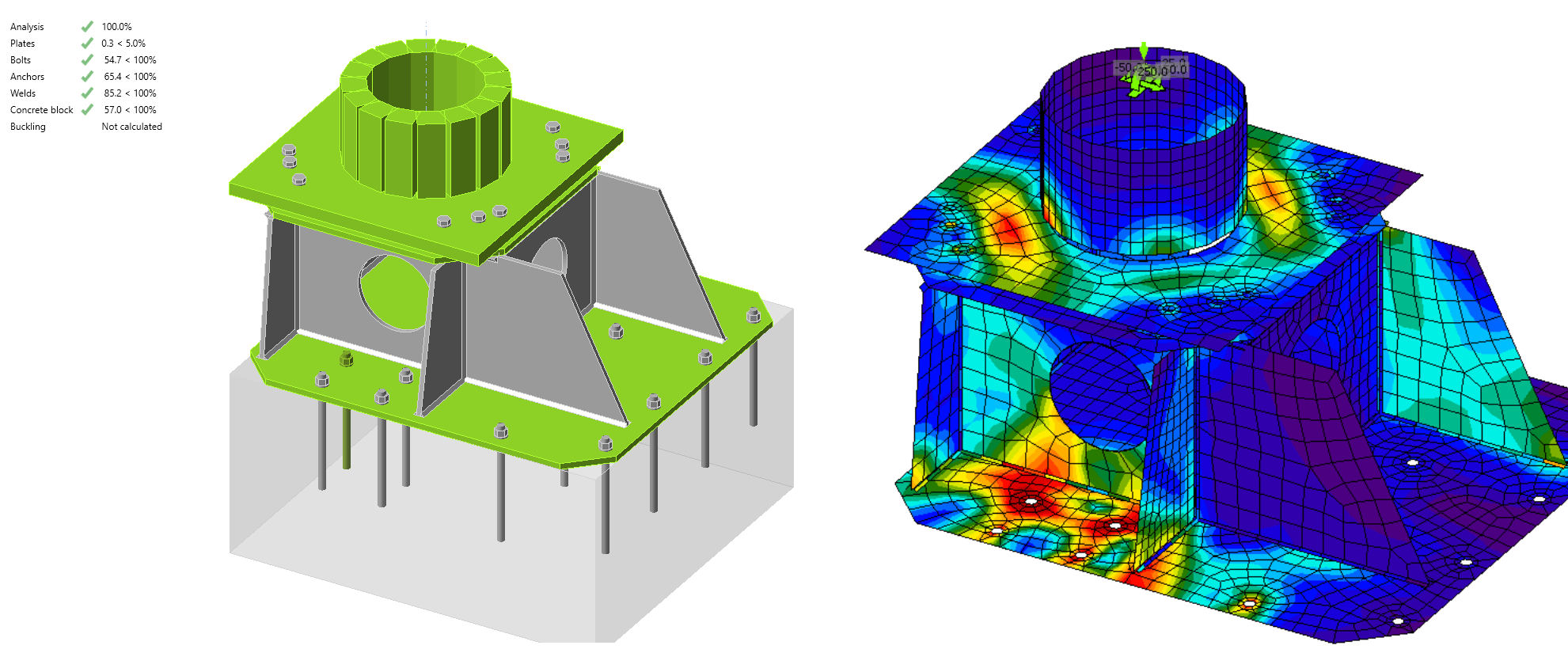
Taux de travail de chaque composant et contrainte de Von Mises
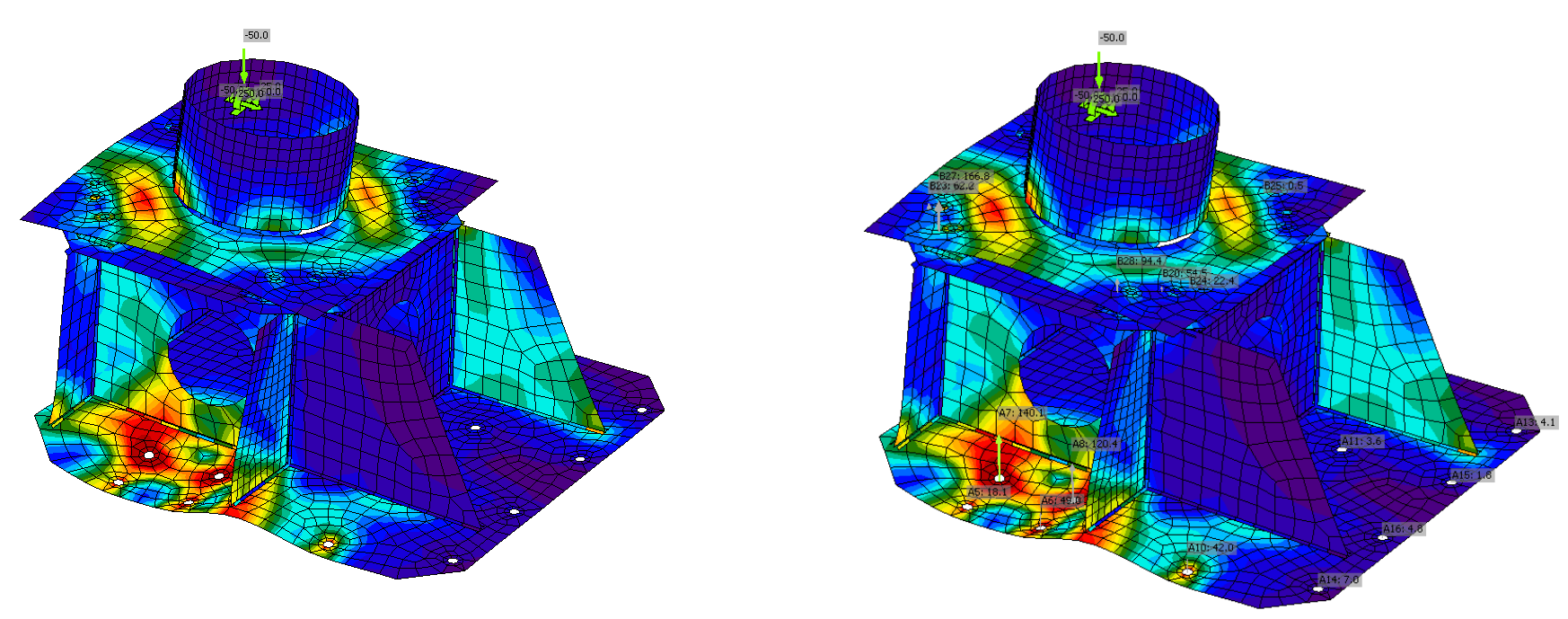
Amplification de la déformation et des forces dans les ancrages
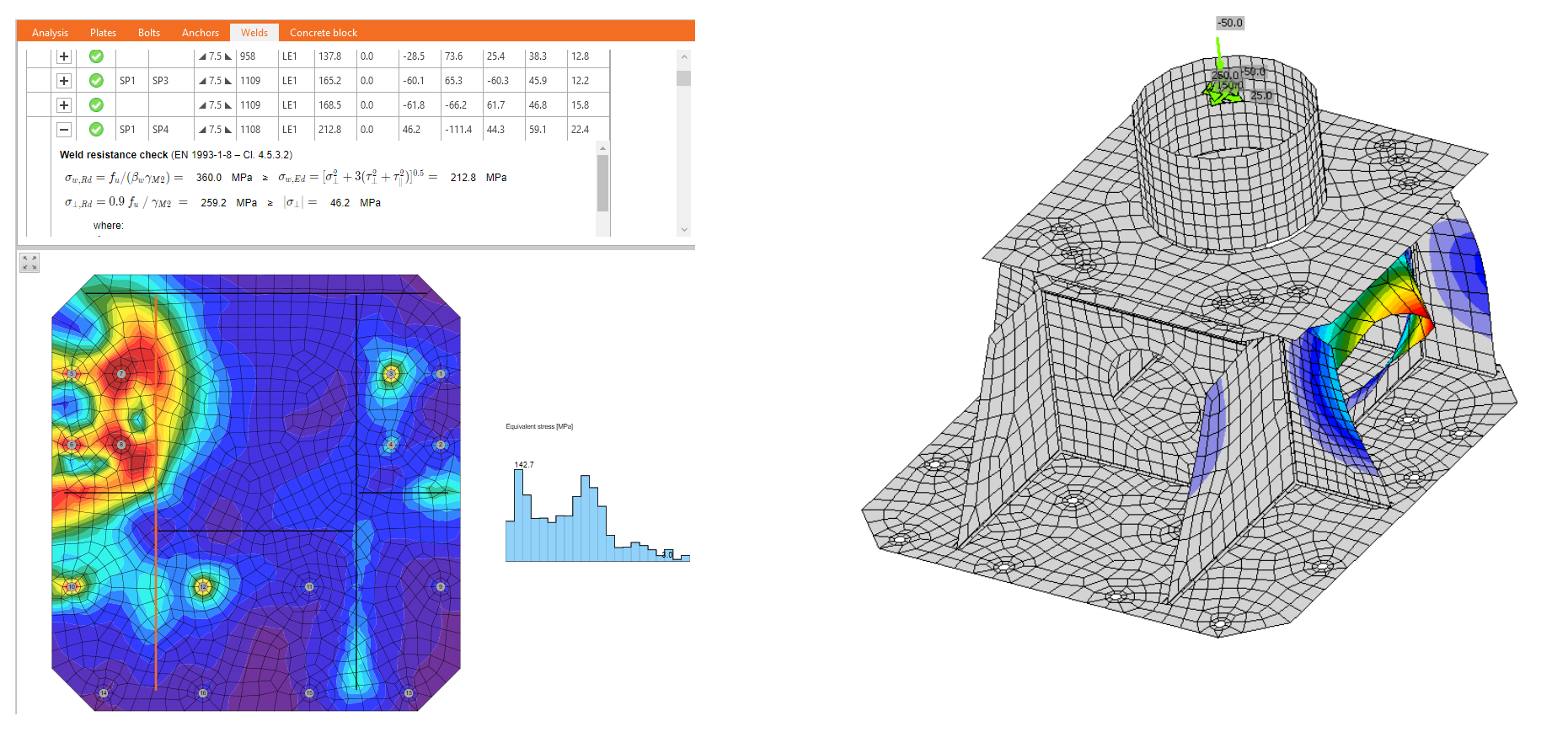
Contrainte dans les soudures et première forme de flambement
Conclusion
IDEA StatiCa, en étroite collaboration avec BKB Metal, a livré le modèle avec une description détaillée de l'approche de modélisation et ses résultats annotés. L'ingénierie conseil d'IDEA StatiCa apporte l'expertise et les conseils nécessaires aux entreprises dans le cadre de projets d'ingénierie, et guide ses clients sur la meilleure façon de répondre à leurs exigences de conception et de construction.
Czech Republic
Le socle complexe transfère toutes les combinaisons critiques et satisfait aux critères de l'Eurocode. Le modèle a fait l'objet d'une analyse contrainte-déformation et de flambement afin de valider tous les aspects de la conception. L'application IDEA StatiCa Connection offre également un fort potentiel pour le domaine de l'ingénierie mécanique, où elle peut servir de logiciel pour la conception et la vérification normative de socles pour bras robotiques mécaniques.
Les retours de Jakub Čech et de son équipe ont été extrêmement positifs. Cela a conduit à la satisfaction tant de BKB Metal que d'IDEA StatiCa quant aux résultats obtenus.
Pour en savoir plus sur l'ingénierie conseil d'IDEA StatiCa, veuillez contacter votre revendeur local ou le bureau régional d'IDEA StatiCa.
Essayez IDEA StatiCa gratuitement
