Méthodes de vérification de la capacité en section
Deux méthodes bien connues peuvent être utilisées pour vérifier l'état limite ultime des éléments en béton 1D. La première fournit la résistance ultime de la section transversale sous la forme d'un domaine d'interaction ou d'un diagramme d'interaction (dans le cas d'un moment fléchissant dans une seule direction). La capacité de la section transversale peut être déterminée comme le rapport des efforts intérieurs agissants aux efforts à l'état limite. La seconde consiste à trouver l'équilibre dans une section transversale, où l'on recherche le comportement réel de la section chargée, l'utilisation des matériaux en termes de contraintes, et une vision des vulnérabilités de la section.
Hypothèses générales de conception et hypothèses de calcul pour l'État Limite Ultime
- La déformation ε dans le ferraillage et le béton est supposée directement proportionnelle à la distance à l'axe neutre (les sections planes restent planes).
- L'interaction du ferraillage et du béton est assurée par l'adhérence entre le béton et le ferraillage sans glissement (la déformation ε du ferraillage est identique à celle des fibres de béton adjacentes).
- La résistance à la traction du béton est négligée (toutes les contraintes de traction sont transmises par le ferraillage).
- Les contraintes de compression du béton dans la zone comprimée sont calculées en fonction de la déformation issue des diagrammes contrainte-déformation.
- Les contraintes dans le ferraillage sont calculées en fonction de la déformation issue des diagrammes contrainte-déformation.
- La déformation ultime du béton comprimé est limitée par εcu2 (diagramme parabole-rectangle pour le béton sous compression) et εcu3 (relation contrainte-déformation bilinéaire), [2].
- La déformation de compression du ferraillage est sans limitation dans le cas d'une branche plastique supérieure horizontale ; dans le cas d'une branche plastique supérieure inclinée, la déformation est limitée à εud,[2].
- Un état limite est atteint lorsque l'état d'au moins un des matériaux dépasse la déformation ultime à l'état limite (si εu n'est pas limité, le béton comprimé est déterminant).
\[ \textsf{\textit{\footnotesize{\qquad Strain stress.}}}\]
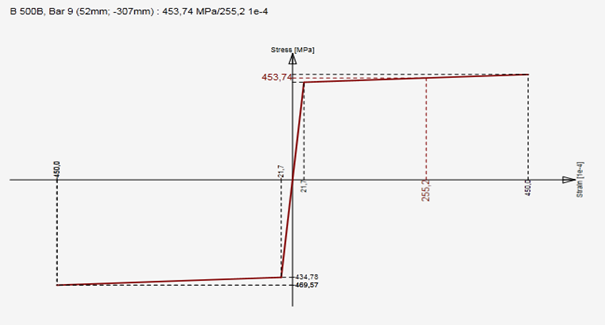
\[ \textsf{\textit{\footnotesize{\qquad Stress-strain design diagram for reinforcing steel with inclined top branch.}}}\]
Diagramme d'interaction
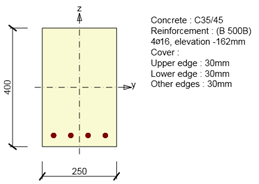
La première option consiste à vérifier la section transversale par une surface d'interaction (ou diagramme d'interaction). Une explication est fournie sur un exemple de surfaces d'interaction pour une section carrée armée tirée de l'exemple présenté dans la figure ci-dessous. Sur la surface d'interaction sont localisés les points définissant l'état limite ultime de la section transversale étudiée. La surface d'interaction est tracée à partir des points (N, My, Mz), qui sont déterminés par intégration des contraintes dans la section transversale, ayant atteint la déformation ultime dans l'un des matériaux. Pour une interaction 3D, la surface peut être dérivée d'un diagramme d'interaction 2D, qui est une courbe fermée correspondant à l'état de contrainte d'un axe neutre en rotation continue.
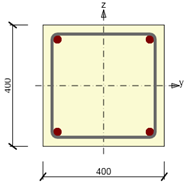
\[ \textsf{\textit{\footnotesize{\qquad Symmetrical reinforced cross-section.}}}\]
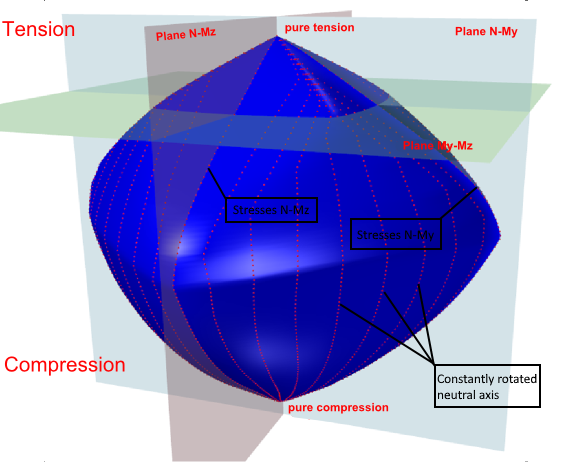
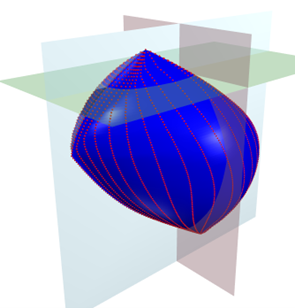
\[ \textsf{\textit{\footnotesize{\qquad Interaction surface shows failure conditions for all load cases of normal force and bending moments.}}}\]
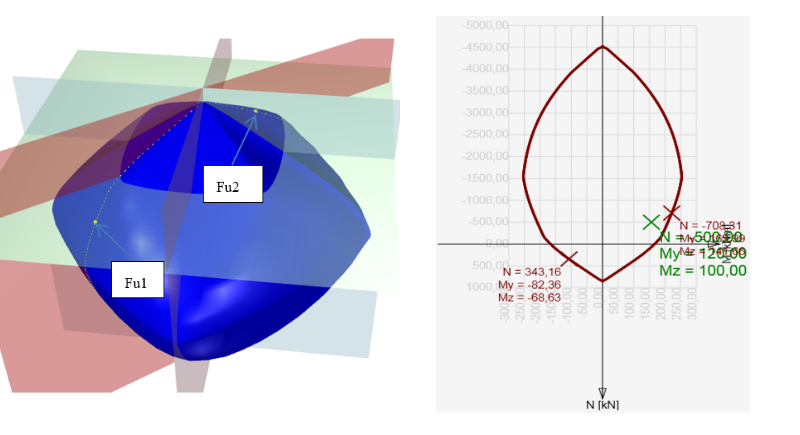
Dans le cas d'une section transversale symétrique par rapport à l'axe y, le diagramme d'interaction est symétrique par rapport au plan N-My. De même, dans le cas d'une section transversale symétrique par rapport à l'axe z, le diagramme d'interaction est symétrique par rapport au plan N-Mz. La section avec ferraillage unilatéral introduit une forme aplatie du diagramme d'interaction.
\[ \textsf{\textit{\footnotesize{\qquad Single symmetrical reinforced cross-section.}}}\]
\[ \textsf{\textit{\footnotesize{\qquad Interaction surface for cross-section with single symmetric reinforcement.}}}\]
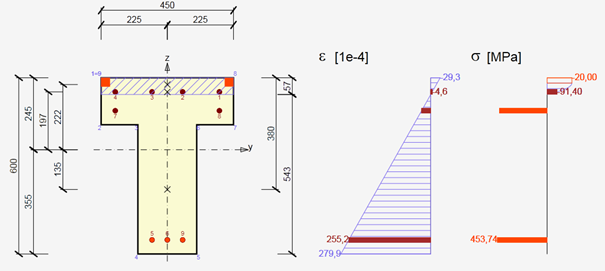
Les points définissant l'état limite ultime sont obtenus par intégration des contraintes. La figure ci-dessous présente les déformations à l'état limite ultime.
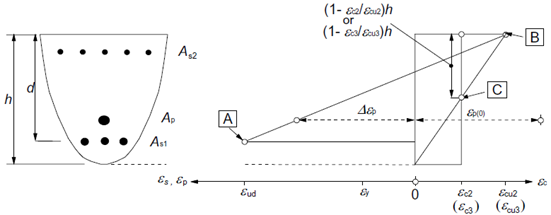
Distributions des déformations à l'état limite ultime (tirées de [2]).
Le diagramme d'interaction montre la rupture de la section transversale sous effort normal et moments fléchissants. [1]
En considérant le problème du diagramme 2D (courbe fermée se situant sur la surface d'interaction), on peut déterminer que le plan de déformation passe par l'axe neutre et le point critique [y, z, ε], considéré comme point critique R. Le point [y, z] définit un point dans la section transversale avec la valeur de déformation ε à l'état limite ultime. L'inclinaison de l'axe neutre est constante pour tous les points du diagramme 2D.
Dans le cas où la contrainte de compression dans le béton est déterminante pour le calcul, le point R correspond à la fibre de béton comprimée la plus éloignée ou au point limite C. Cependant, ceci ne peut s'appliquer que si la section est constituée d'un seul type de béton - et non d'une section transversale mixte.
Dans le cas où la contrainte de traction dans le ferraillage est déterminante pour le calcul (la déformation εud est dépassée à l'état limite ultime pour une ou plusieurs barres), la condition suivante doit être satisfaite : pour le plan de déformation donné, la valeur εud ne doit être dépassée pour aucune autre barre.
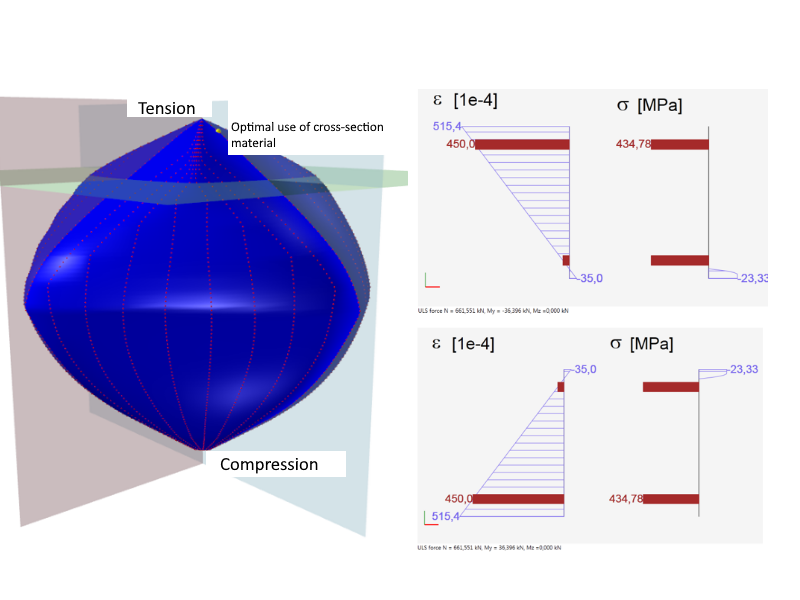
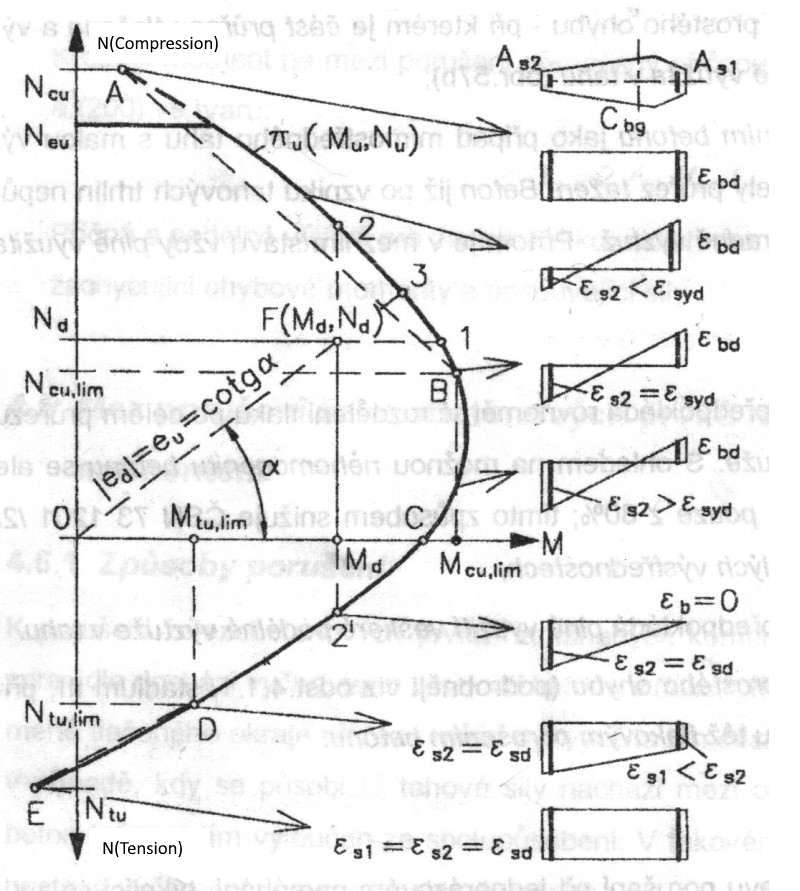
\[ \textsf{\textit{\footnotesize{\qquad Optimal use of cross-section material.}}}\]
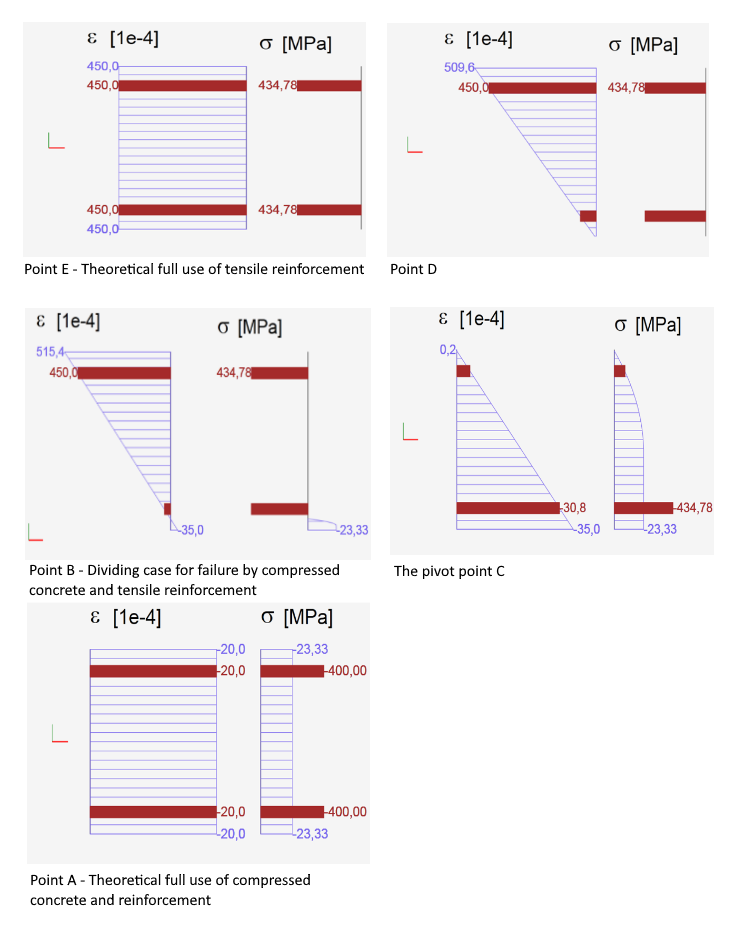
\[ \textsf{\textit{\footnotesize{\qquad Characteristic strain plane positions calculated for purpose of interaction diagram.}}}\]
La figure ci-dessus montre que le diagramme peut être divisé en deux parties : la partie où la rupture est causée par un effort de traction et la partie qui rompt sous un effort de compression. Les points limites correspondent au cas décrit ci-dessus, où l'inclinaison extrême du plan de déformation est également visible. Lors du tracé d'un diagramme d'interaction, l'inclinaison du plan de déformation de la section transversale varie dans cet intervalle, tandis que l'on recherche le point R (voir ci-dessus). Sur la base du plan ainsi défini, on effectue l'intégration pour obtenir les contraintes à l'état limite ultime.
Vérification d'une section transversale soumise à un effort axial et un moment fléchissant
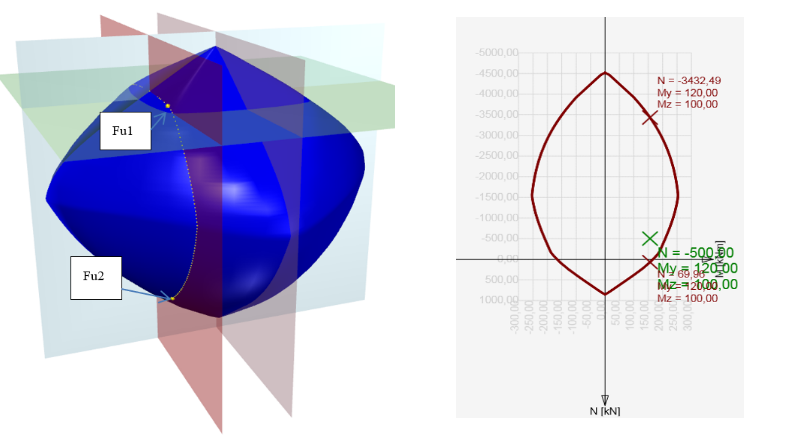
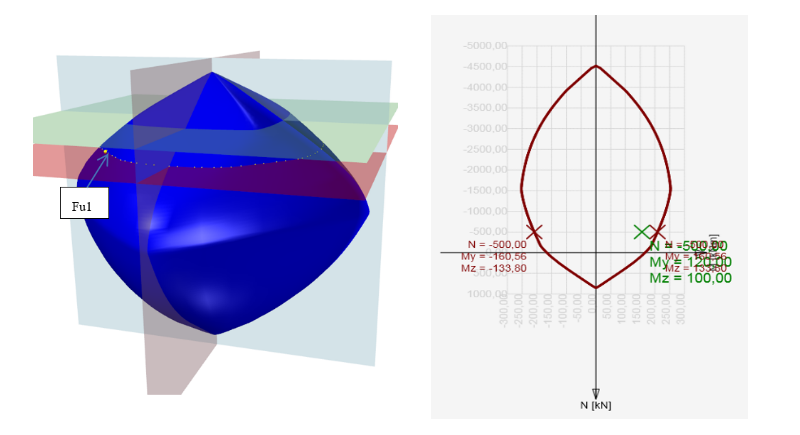
La vérification d'une section transversale soumise à un effort axial et un moment fléchissant consiste à démontrer que les contraintes vérifiées (combinaison Nd, Myd, Mzd) se situent à l'intérieur ou sur la surface du domaine d'interaction. Différentes méthodes permettent d'effectuer cette vérification. L'exemple suivant illustre la vérification d'une section transversale rectangulaire soumise à des efforts Nd = -500 kN, Myd = 120 kNm, Mzd = 100 kNm.
Méthode NuMuMu
Pour définir la résistance d'une section transversale, on suppose des variations proportionnelles de toutes les composantes des efforts intérieurs (l'excentricité de l'effort normal reste constante) jusqu'à ce que la surface d'interaction soit atteinte. La variation des efforts intérieurs concernés peut être interprétée comme un déplacement le long d'une droite reliant l'origine du système de coordonnées (0,0,0) et le point défini par les efforts intérieurs (NEd, MEd,y, MEd,z). Les deux intersections de cette droite avec la surface d'interaction, qui peuvent être trouvées, représentent deux ensembles d'efforts à l'état limite ultime. À chaque intersection, le programme détermine trois efforts à l'état limite : la résistance de calcul à l'effort axial NRd et les moments résistants de calcul correspondants MRdy, MRdz.
Méthode NuMM
Pour définir la résistance de la section transversale, on suppose un effort normal constant (égal à l'effort normal de calcul agissant) et des variations proportionnelles des moments fléchissants jusqu'à ce que la surface d'interaction soit atteinte. La variation des efforts intérieurs concernés peut être interprétée comme un déplacement dans un plan horizontal le long de la droite reliant le point (NEd,0,0) et le point défini par les efforts intérieurs agissants (NEd, MEd,y, MEd,z). Les deux intersections de cette droite avec la surface d'interaction, qui peuvent être trouvées, représentent deux ensembles d'efforts à l'état limite ultime. À chaque intersection, le programme détermine trois efforts à l'état limite : les moments résistants de calcul MRdy, MRdz et l'effort normal de calcul agissant (correspondant) NEd.
Méthode NMuMu
Pour définir la résistance de la section transversale, on suppose un effort normal constant (égal à l'effort normal de calcul agissant) et des variations proportionnelles des moments fléchissants jusqu'à ce que la surface d'interaction soit atteinte. La variation des efforts intérieurs concernés peut être interprétée comme un déplacement dans un plan horizontal le long de la droite reliant le point (NEd,0,0) et le point défini par les efforts intérieurs agissants (NEd, MEd,y, MEd,z). Les deux intersections de cette droite avec la surface d'interaction, qui peuvent être trouvées, représentent deux ensembles d'efforts à l'état limite ultime. À chaque intersection, le programme détermine trois efforts à l'état limite : les moments résistants de calcul MRdy, MRdz, et l'effort normal de calcul agissant (correspondant) NEd.
Détermination de la réponse de la section
Une autre possibilité de vérifier la section transversale consiste à déterminer la réponse de la section transversale (c'est-à-dire la distribution des déformations et des contraintes sous les efforts intérieurs agissants). Cette méthode est également connue sous le nom de méthode de la déformation limite. Le niveau des contraintes agissantes dans chaque fibre (dans le cas d'une flexion plane, dans chaque couche) et dans chaque barre de ferraillage est calculé en fonction de la déformation issue du diagramme contrainte-déformation du matériau.
La détermination de la réponse de la section transversale est calculée à l'aide de la méthode numérique spécifiée dans [6]. Le principe consiste en l'incrément progressif du chargement de la section par les composantes déséquilibrées des efforts non transmis. Ceux-ci sont obtenus par intégration des contraintes sur la section à l'aide des diagrammes contrainte-déformation. Si la valeur de contrainte peut être trouvée pour la déformation dans le diagramme contrainte-déformation, voir la figure ci-dessous (a), la contrainte calculée est correcte en supposant un matériau élastique linéaire. Dans les cas (b) et (c), la contrainte pour un calcul linéaire atteint des valeurs irréalistes, et une partie (b) ou la totalité de la valeur (c) ne peut pas être transmise par le matériau. En intégrant les contraintes non transmises, on obtient les efforts intérieurs non transmis, dont les résultantes doivent être ajoutées aux efforts intérieurs des charges variables.
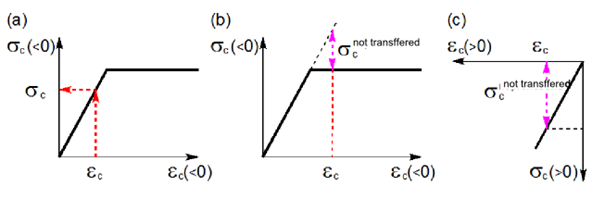
Contraintes non transmises dans les diagrammes contrainte-déformation. [4]
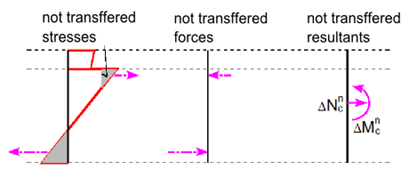
Efforts intérieurs non transmis. [4]
Cette méthode de calcul nécessite l'utilisation de méthodes numériques pour intégrer les contraintes sur la surface de la section transversale et pour l'analyse non linéaire des équations d'équilibre dans la section. L'itération est arrêtée lorsque les critères de convergence sont satisfaits.
\[\frac{{{F_e} - {F_i}}}{{{F_e}}} \le max\left\{ {e,d} \right\}\]
où
Fe est le chargement de la section,
Fi est la réponse de la section (efforts intérieurs calculés sur la base du plan de déformation).
Si a est la valeur approchée (approximée) et b est la valeur exacte (vraie), alors l'écart absolu est donné par l'équation suivante.
\[e = \left| {b - a} \right|\]
L'écart relatif est donné par la formule suivante :
\[d = \left| {\frac{{b - a}}{b}} \right|\]
Dans la plupart des programmes, il est possible de définir ces critères de convergence (les valeurs par défaut sont 1% pour l'erreur relative, 100 N, 100 Nm pour l'erreur absolue de l'effort normal et des moments).
Ainsi, si les données d'entrée sont N = 0 kN, My = 100 kNm, Mz = 0 kNm et que les efforts intégrés après itération sont N = - 0,07 kN, My = 100,5 kNm, Mz = 0,02 kNm, l'évaluation sera la suivante. En tenant compte du fait que N et Mz sont égaux à 0, une comparaison avec l'écart absolu peut être effectuée :
La valeur de l'effort normal 100N> | 70 | N
La valeur du moment fléchissant Mz 100Nm> | 20 | Nm
La valeur du moment fléchissant My
\[d = \left| {\frac{{b - a}}{b}} \right| = \frac{{100 - 100,5}}{{100}} = 0,005\; < 0,01\]
Vérification de la section transversale par la réponse
Dans le cas de la recherche d'un équilibre dans la section transversale, le plan de déformation est connu. À partir du plan de déformation, il est possible de calculer la déformation en tout point de la section, puis les contraintes ou les efforts intérieurs dans les barres de ferraillage, la section transversale ou ses parties, à l'aide des diagrammes contrainte-déformation des matériaux. Les valeurs de contraintes et de déformations calculées sont comparées aux valeurs de déformation limite issues des diagrammes contrainte-déformation des matériaux utilisés.
L'avantage de cette méthode est que l'on obtient une image complète des valeurs de contraintes et de déformations dans la section sous les efforts intérieurs agissant sur la section transversale.