러시아 기준에 따른 볼트 및 프리로드 볼트의 규정 검토
볼트
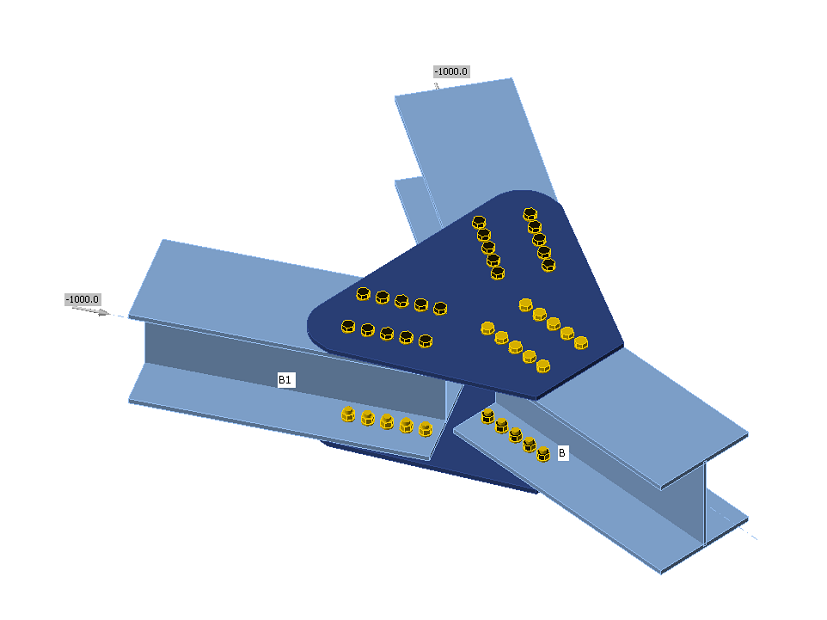
볼트는 SP 16, 조항 14.2에 따라 검토됩니다. 각 볼트의 인장력 및 전단력은 유한요소 해석으로 결정됩니다. 프라잉 힘은 유한요소 해석으로 결정되어 고려됩니다. 각 전단면은 개별적으로 검토됩니다. 지압에 대한 플라이는 인접 면의 전단력 합계에 대해 검토됩니다.
전단을 받는 볼트
설계 전단력을 받는 볼트는 조항 14.2.9에 따라 설계되며 다음을 만족해야 합니다:
\[ N_s \le N_{bs} = R_{bs} A_b \gamma_b \gamma_c \]
여기서:
- Ns – 볼트 한 면의 전단력
- Nbs – 볼트 전단 저항력
- Rbs – 볼트의 설계 전단 강도 – SP 16, 표 5
- Ab – 볼트 총단면적
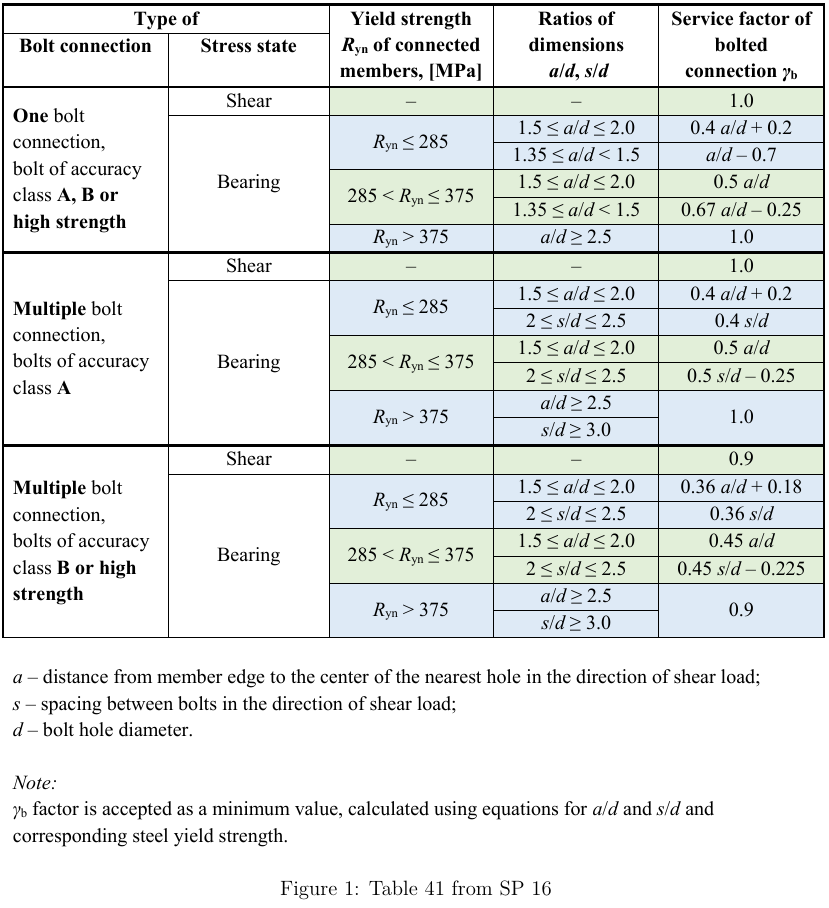
- γb – 볼트 접합부 사용 계수 – SP 16, 표 41 – 단일 볼팅 및 정밀도 등급 A의 다중 볼팅의 경우 γb = 1.0, 다중 볼팅 및 정밀도 등급 B와 고강도 볼트(Rbun ≥ 800 MPa)의 경우 γb = 0.9
- γc – 사용 계수 – SP 16, 표 1, Code setup에서 편집 가능
| Rbyn [MPa] | Rbs [MPa] |
| \(R_{byn} \le 300 \) | \(0.42 \cdot R_{bun} \) |
| \(300 < R_{byn} \le 400 \) | \(0.41 \cdot R_{bun} \) |
| \(400 < R_{byn} \le 936 \) | \(0.40 \cdot R_{bun} \) |
| \(936 > R_{byn} \) | \(0.35 \cdot R_{bun} \) |
각 전단면은 개별적으로 검토됩니다.
인장을 받는 볼트
설계 인장력을 받는 볼트는 SP 16, 조항 14.2.9에 따라 설계되며 다음을 만족해야 합니다:
\[ N_t ≤ N_{bt} = R_{bt} A_{bn} \gamma_c \]
여기서:
- Nt – 볼트의 인장력
- Nbt – 볼트 인장 저항력
- Rbt – 설계 인장 강도 – SP 16, 표 5
- Abn – 볼트의 순단면적
- γc – 사용 계수 – SP 16, 표 1, Code setup에서 편집 가능
| Rbun [MPa] | Rbt [MPa] |
| \(R_{bun} < 830 \) | \(0.45 \cdot R_{bun} \) |
| \(830 \le R_{bun} < 1040 \) | \(0.54 \cdot R_{bun} \) |
| \(R_{bun} \ge 1040 \) | \(0.70 \cdot R_{bun} \) |
전단과 인장의 조합을 받는 볼트
전단력과 인장력을 동시에 받는 볼트는 SP 16, 조항 14.2.13에 따라 설계되며 다음을 만족해야 합니다:
\[ \sqrt{\left ( \frac{N_t}{N_{bt}} \right ) ^2 + \left ( \frac{N_s}{N_{bs}} \right ) ^2} \le 1.0 \]
여기서:
- Nt – 볼트의 인장력
- Nbt – 볼트 인장 저항력
- Ns – 볼트 한 면의 전단력
- Nbs – 볼트 전단 저항력
지압을 받는 볼트
전단 볼트에 의한 지압력을 받는 플레이트는 SP 16, 조항 14.2.9에 따라 설계되며 다음을 만족해야 합니다:
\[ N_s ≤ N_{bp} = R_{bp} d_b t \gamma_b \gamma_c \]
여기서:
- Ns – 플라이에 작용하는 볼트의 전단력
- Nbp – 플라이의 지압 저항력
- Rbp – 지압 설계 강도; 정밀도 등급 A의 경우 Rbp = 1.6 · Ru, 정밀도 등급 B의 경우 Rbp = 1.35 · Ru – SP 16, 표 5
- Run – 연결 요소의 극한 강도
- db – 볼트 직경
- t – 플레이트 두께
- γb – 볼트 접합부 사용 계수 – SP 16, 표 41
- γc – 사용 계수 – SP 16, 표 1, Code setup에서 편집 가능
각 플레이트는 개별적으로 검토되며 최악의 경우가 표시됩니다. SP 16은 상세 한계를 벗어난 경우에 대한 볼트 연결의 사용 계수 γb를 제시하지 않습니다. 따라서 이러한 경우에는 지압 검토가 수행되지 않습니다.
마찰형 연결
마찰형 연결의 경우, 미끄러짐을 제한하고 SP 16, 조항 14.3에 따라 검토해야 합니다. 이러한 볼트는 미끄러짐 발생 후 극한 한계 상태에 대해 지압형으로도 검토해야 합니다. 전단력을 받는 볼트는 다음을 만족해야 합니다:
\[ N_s \le N_{bf} = Q_{bh} \gamma_b \gamma_c \]
여기서:
- Ns – 프리로드 볼트 1개 및 마찰면 1개에 작용하는 전단력
- Nbf – 프리로드 볼트 1개 및 마찰면 1개의 전단 미끄러짐 저항력
- Qbh = Rbh Abn μ / γh – 프리로드 볼트 1개 및 마찰면 1개의 설계 미끄러짐 저항력
- Rbh = 0.7 · Rbun – 프리로드 볼트의 설계 프리로드 – SP 16, 조항 6.7
- Rbun – 볼트의 극한 인장 저항력
- Abn – 인장 응력 면적
- μ – 프리로드 볼트의 마찰 계수 – SP 16, 표 42, Code setup에서 편집 가능
- γh – 볼트 조임 시 계수 – SP 16, 표 42
- 일반 구멍: 정적 하중, Δ ≤ 4 mm; 동적 하중, Δ ≤ 1 mm:
- γh = 1.12 (μ ≥ 0.42인 경우)
- γh = 1.17 (0.35 ≤ μ < 0.42인 경우)
- γh = 1.30 (μ < 0.35인 경우)
- 확대 구멍: 정적 하중, Δ > 4 mm; 동적 하중, Δ > 1 mm:
- γh = 1.70 (μ < 0.35인 경우)
- γh = 1.35 (μ ≥ 0.35인 경우)
- 일반 구멍: 정적 하중, Δ ≤ 4 mm; 동적 하중, Δ ≤ 1 mm:
- Δ – 볼트 구멍 직경과 볼트 직경의 차이
- γb – 마찰 접합부 사용 계수 – SP 16, 조항 14.3.4
- γc – 사용 계수 – SP 16, 표 1, Code setup에서 편집 가능
정적 또는 동적 하중은 Code setup에서 설정할 수 있습니다.
| 볼트 수 n | \( \gamma_b \) |
| \( n < 5 \) | 0.8 |
| \( 5 \le n < 10 \) | 0.9 |
| \( n \ge 10 \) | 1.0 |
유효 접촉면 수 κ는 각 접촉면이 개별적으로 검토되므로 항상 1과 같습니다.
SP 16, 조항 14.3.6에 따라, 전단과 인장의 조합을 받는 마찰형 연결의 볼트에 대해 마찰 접합부 사용 계수 γb에 다음을 곱합니다:
\[ \gamma_b = \gamma_b \cdot \left ( 1 - \frac{N_t}{P_b} \right ) \]
여기서:
- Nt – 볼트의 인장력
- Pb = Rbh Abn – 볼트의 프리로드
- Rbh = 0.7 · Rbun – 프리로드 볼트의 설계 프리로드 – SP 16, 조항 6.7
- Abn – 인장 응력 면적
마찰형 연결은 극한 한계 상태에 대해서도 검토해야 합니다. 볼트 유형을 지압형 – 인장/전단 상호작용으로 변경하고, 하중을 적절히 증가시킨 후 접합부를 다시 검토해야 합니다.