Cómo establecer la posición de los tornillos
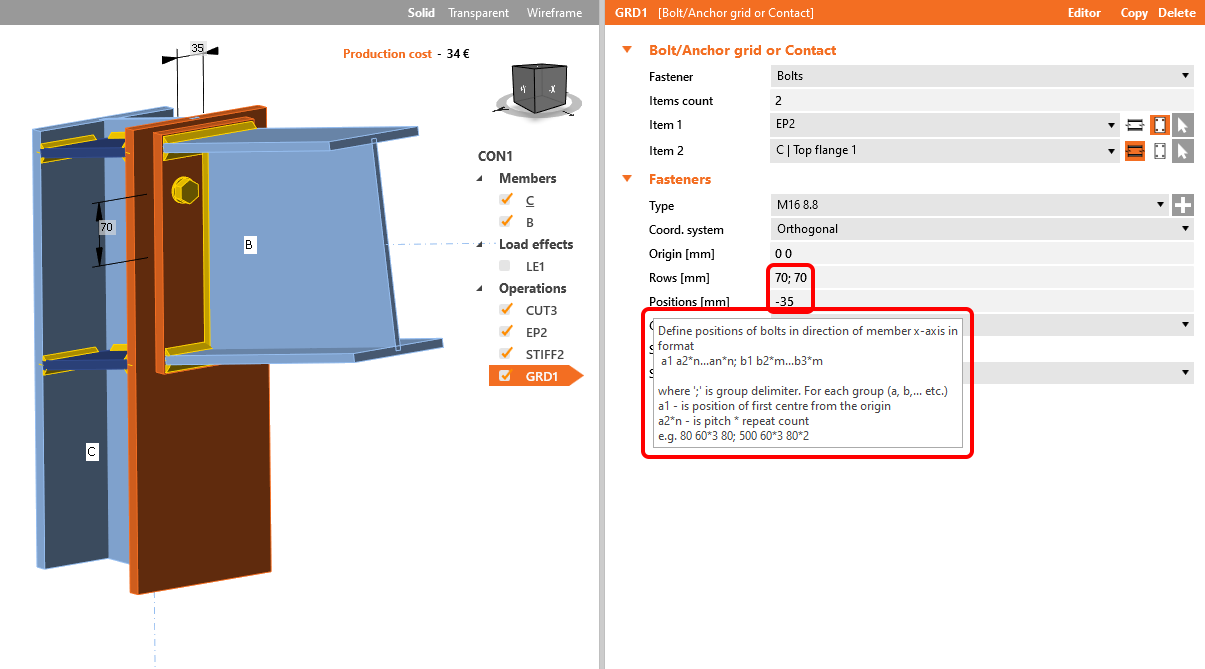
Para las operaciones que generan tornillos (cuadrícula de tornillos o contacto, placa de testa, placa de aleta, etc.), la introducción de la posición de los tornillos y la definición de sus coordenadas difieren. Al pasar el cursor sobre el texto, puede leer un tooltip que describe el tipo de entrada, p. ej., para Filas y Posiciones de la cuadrícula de tornillos general.
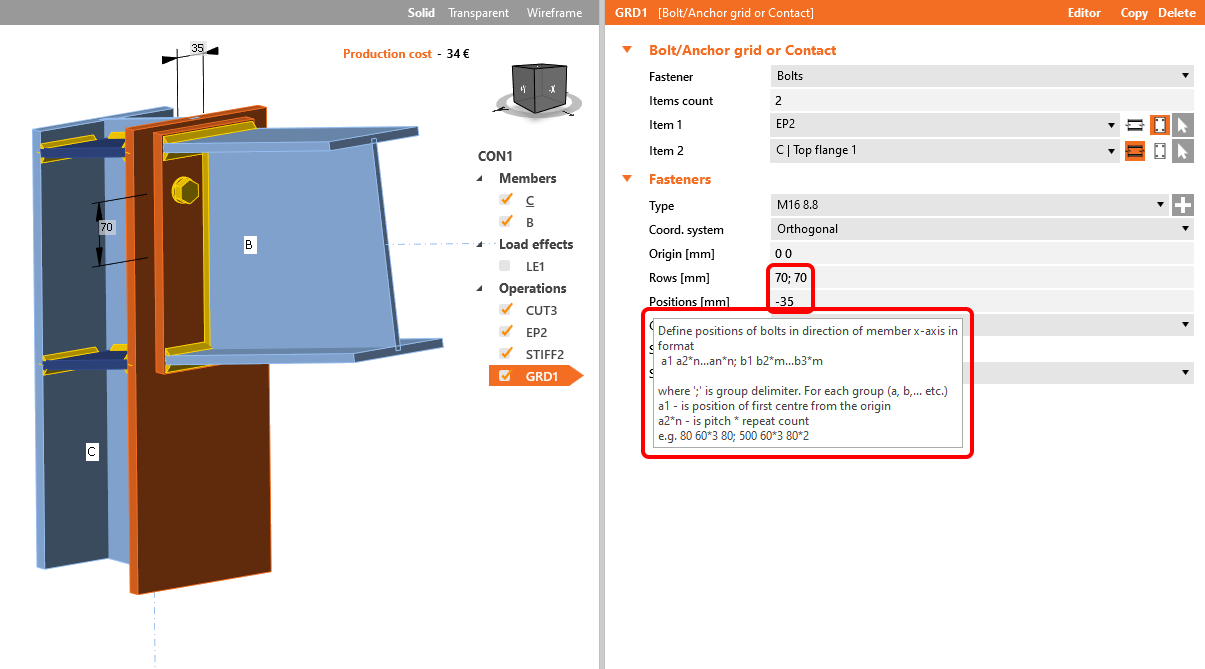
Familiarícese con la introducción de tornillos para cada operación probando diferentes valores. Siempre puede comprobar las dimensiones de la cuadrícula de tornillos generada en la escena 3D.
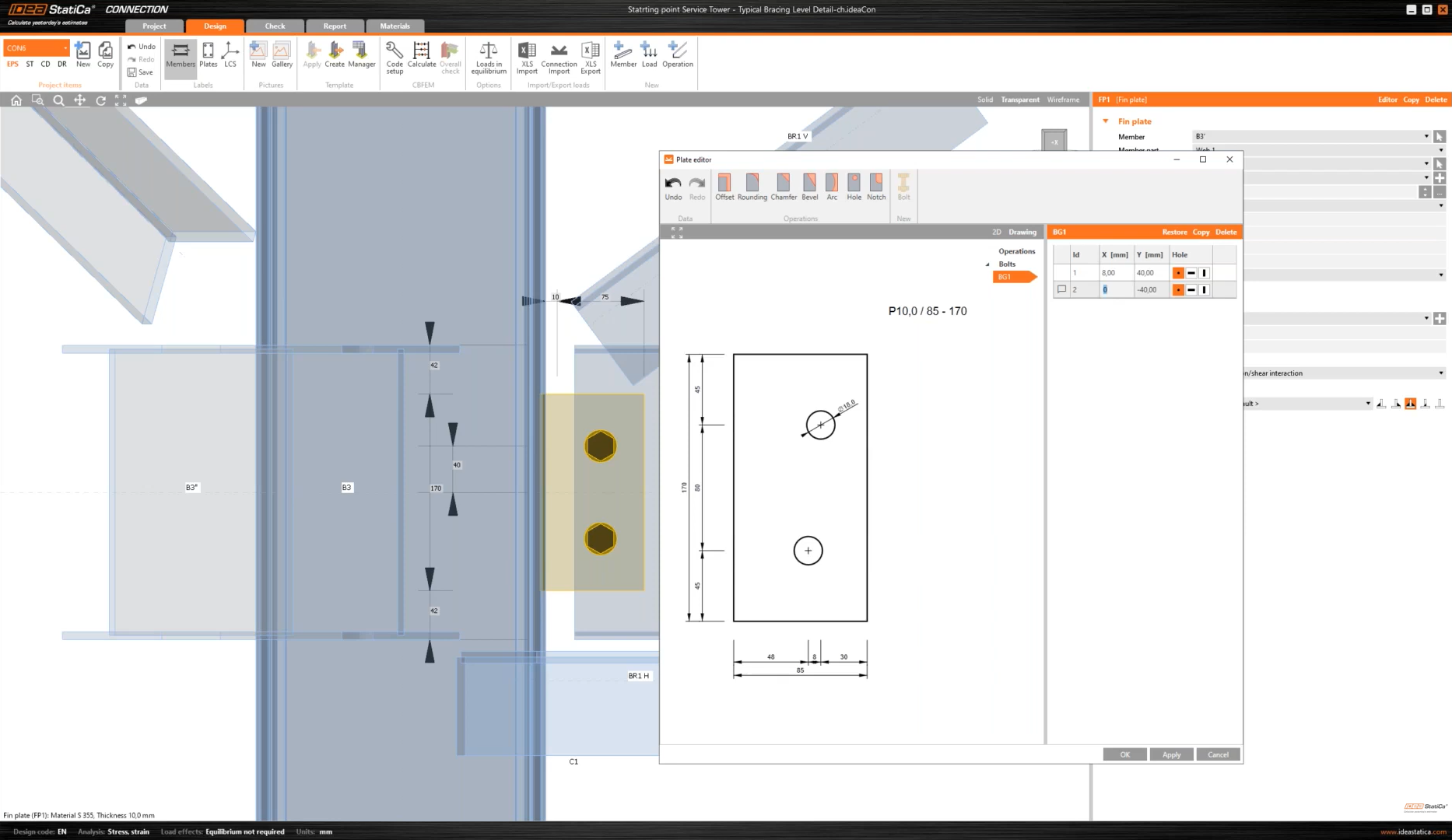
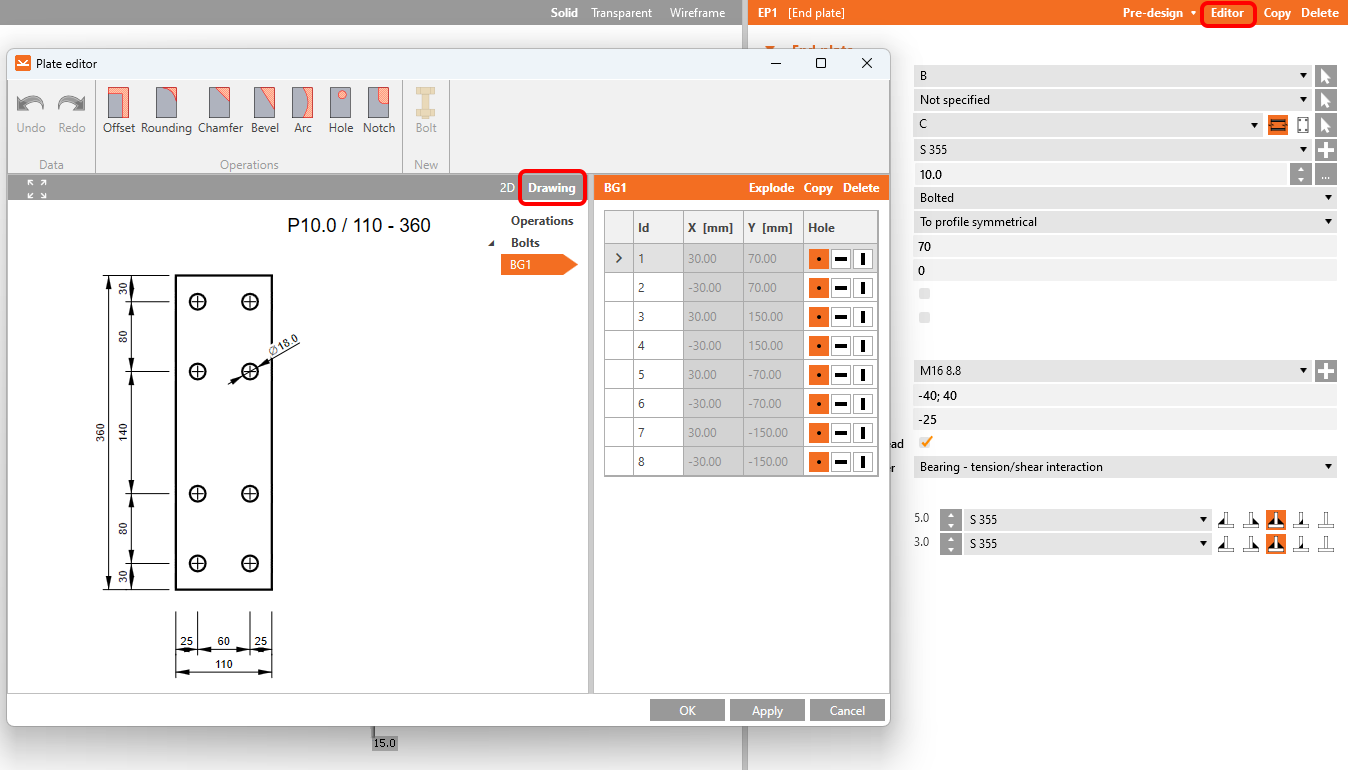
Para mostrar un dibujo 2D con dimensiones, vaya al Editor de la operación y cambie a la pestaña Dibujo.
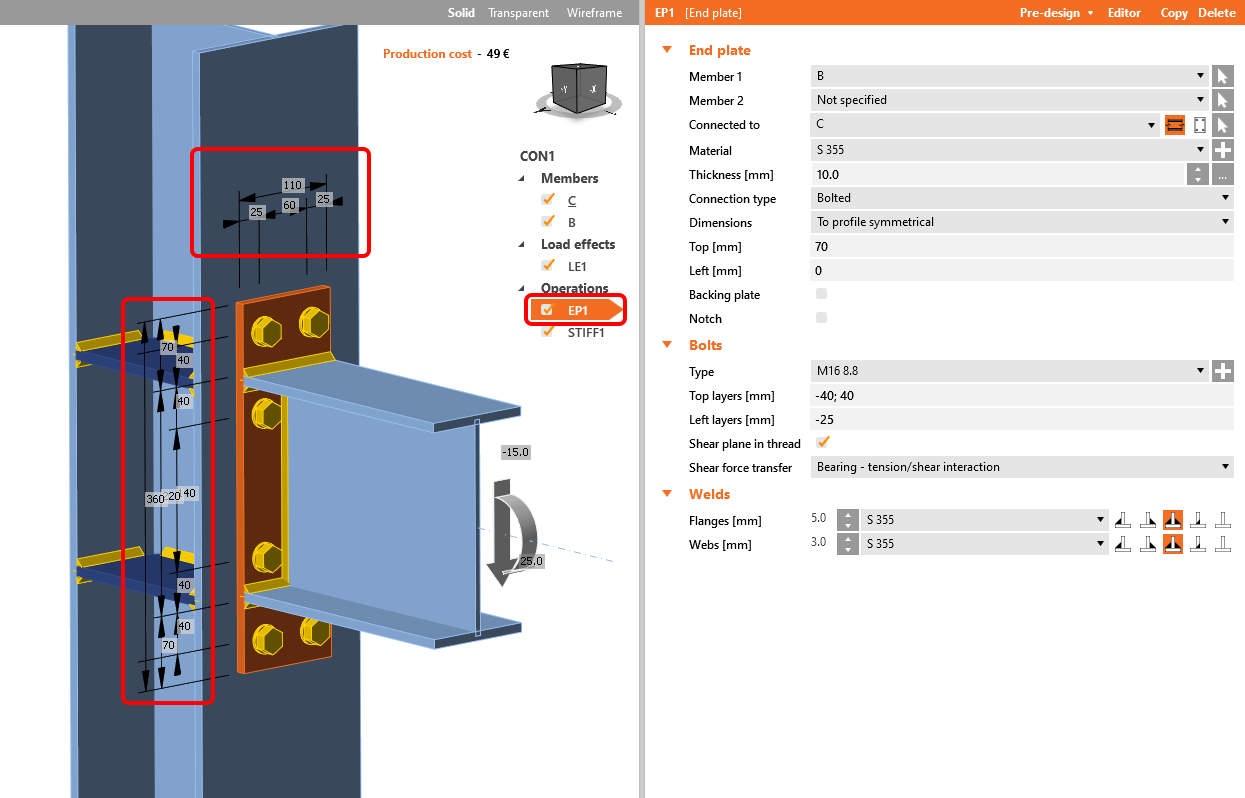
Introducción de la posición de tornillos para la operación de placa de testa
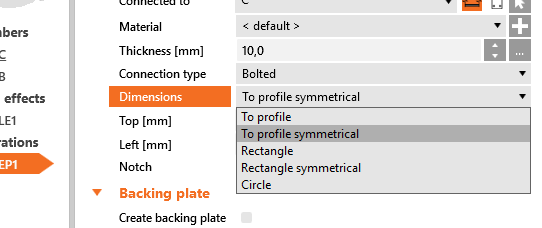
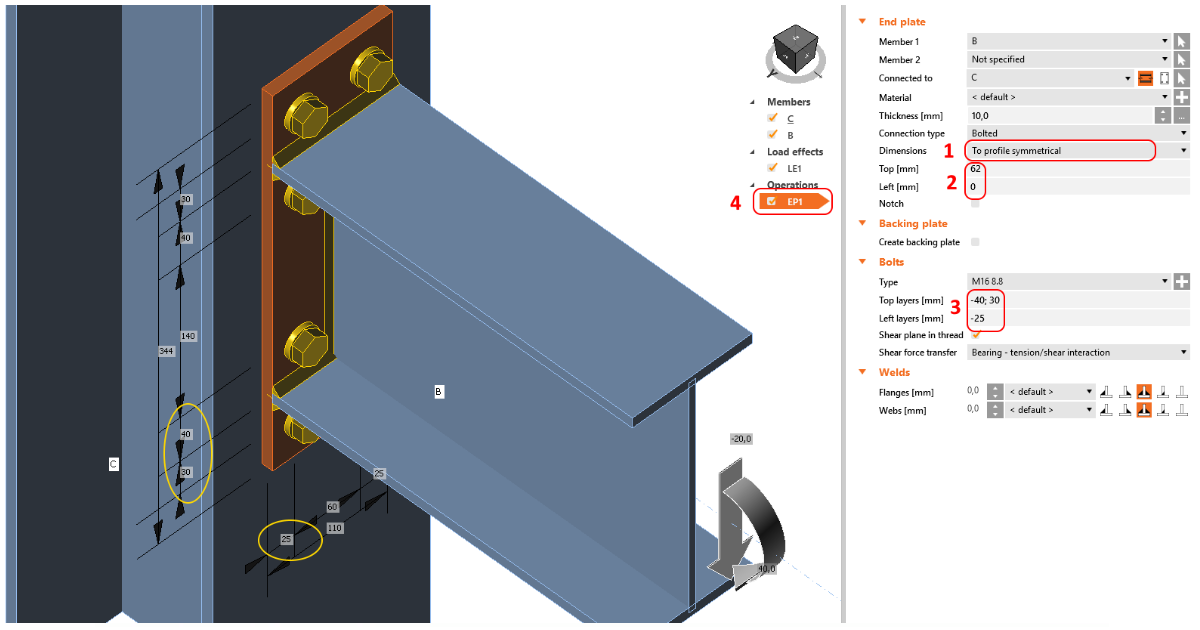
Añada la operación Placa de testa y con el parámetro Dimensiones establezca el tipo de placa de testa y, por tanto, la entrada de tornillos.
A continuación, introduzca las posiciones simétricas de los tornillos rellenando los valores de las Capas superiores y las Capas izquierdas. Para esta operación, los valores representan la distancia desde el contorno de la sección transversal hacia el exterior.
Se puede especificar un número múltiple de filas y columnas de tornillos utilizando delimitadores de dos tipos:
Delimitador absoluto ";" (punto y coma) - distancia medida desde el contorno de la sección transversal (línea de referencia)
Delimitador relativo " " (espacio) - distancia medida desde la fila/columna de tornillos anterior
P. ej., la entrada "40; 80; 120; 160; 200" es igual a "40 40 40 40 40" y también a "4*40". También puede combinar todos los delimitadores, p. ej., introducir "40; 80; 120 40 40".
Puede comprobar las dimensiones de la cuadrícula de tornillos en la escena 3D.
Mover un tornillo individual dentro de una cuadrícula de tornillos
Puede cambiar la posición o mover un tornillo individual o una fila de tornillos en una cuadrícula de tornillos en el Editor. Seleccione la operación de fabricación que contiene la cuadrícula de tornillos, luego Descomponga el grupo de tornillos y cambie las coordenadas de cada tornillo por separado.