
Distâncias de apoio de parafusos para o Eurocódigo
A nova versão traz um algoritmo melhorado para o cálculo do espaçamento entre parafusos (p1; p2), distâncias de extremidade (e1) e de bordo (e2) para a verificação normativa de apoio do Eurocódigo. Esta melhoria é sobretudo relevante para geometrias gerais de chapas, chapas com aberturas, recortes, etc.
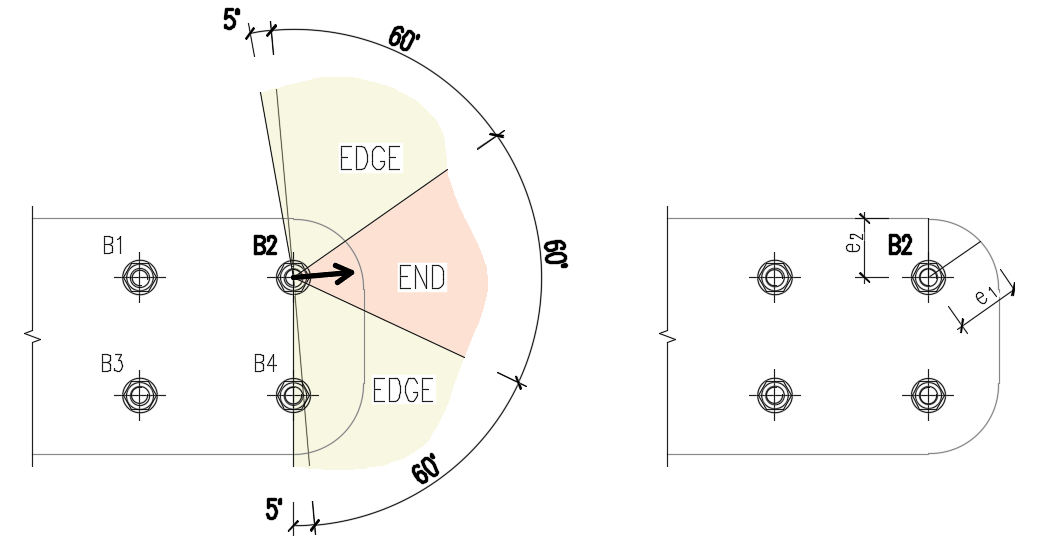
O algoritmo lê a direção real do vetor de força de corte resultante num dado parafuso e calcula as distâncias necessárias para a verificação normativa de apoio.
As distâncias de extremidade (e1) e de bordo (e2) são determinadas dividindo o contorno da chapa em três segmentos. O "segmento de extremidade" é indicado por um intervalo de 60° na direção do vetor de força. Os "segmentos de bordo" são definidos por dois intervalos de 65° perpendiculares ao vetor de força. A menor distância entre um parafuso e um bordo no segmento relevante é então tomada como distância de extremidade ou de bordo.
O algoritmo avalia todas as chapas ligadas pelo parafuso — as chapas de ligação (por exemplo, uma chapa de emenda), as chapas do elemento (por exemplo, um banzo superior) — e é utilizada a menor distância.
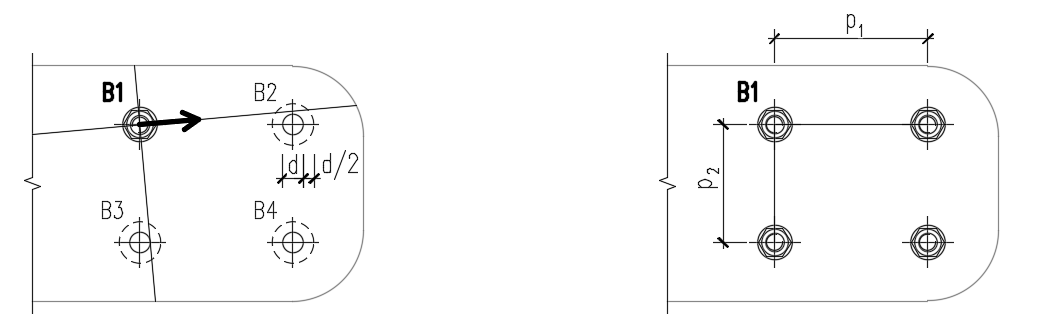
As distâncias de espaçamento entre furos de parafusos (p1; p2) são determinadas ampliando virtualmente os furos de parafusos circundantes em metade do seu diâmetro e traçando duas linhas na direção e perpendicularmente ao vetor de força de corte. Quando estas linhas intersectam furos de parafusos virtualmente ampliados, as distâncias a esses parafusos são consideradas como p1 e p2 no cálculo.
Se as linhas não intersectarem o parafuso visualmente mais próximo (mesmo que a linha passe perto do parafuso), esse parafuso é ignorado. Se as linhas não intersectarem nenhum parafuso, é utilizado um valor infinito.
Disponível nas edições Expert e Enhanced .