IDEA StatiCa Connection - Progettazione strutturale delle connessioni in acciaio
Introduzione al metodo CBFEM
Introduzione generale alla progettazione strutturale delle connessioni in acciaio
Modello del materiale del collegamento in acciaio
Modello della piastra e convergenza della mesh
Contatti tra le piastre di connessioni in acciaio
Analisi delle connessioni saldate
Connessioni con bulloni e bulloni precaricati
Bulloni di ancoraggio
Modello strutturale di un blocco di calcestruzzo
Modello di analisi di IDEA StatiCa
Modello di analisi dei giunti in acciaio
Equilibrio del nodo nel modello FEM 3D
Forze interne nelle connessioni in acciaio
Analisi della resistenza dei giunti in acciaio
Analisi della rigidezza e della capacità di deformazione dei giunti in acciaio
Progettazione in capacità della connessione in acciaio
Resistenza di progetto della connessione in acciaio
Analisi di instabilità dei giunti in acciaio
Convergenza dell'analisi di modelli complessi di connessioni in acciaio
Giunti acciaio-legno
Membrature in acciaio a parete sottile
Vincolo latero-torsionale nella progettazione strutturale
Giunti in acciaio di membrature a sezione cava
Analisi a fatica nella progettazione strutturale
Progettazione in caso di incendio
Dimensionamento delle saldature
Specifiche per i codici nazionali
Verifica delle componenti in accordo a EN (Eurocodice)
Verifica delle componenti in accordo a AISC (American standards)
Verifica delle componenti in accordo a CISC (Canadian standards)
Verifica delle componenti in accordo a AS (Australian standards)
Verifica delle componenti in accordo a SP (Russian standards)
Verifica delle componenti in accordo a IS 800 (Indian standards)
Verifica delle componenti in accordo a HKG (Hong Kong Code of Practice)
Verifica delle componenti in accordo a GB (Chinese standards)
Introduzione al metodo CBFEM
Introduzione generale alla progettazione strutturale delle connessioni in acciaio
Introduzione
Nella progettazione di strutture in acciaio, gli ingegneri preferiscono l’utilizzo di membrature ad asta. Tuttavia, ci sono molti punti della struttura in cui la teoria delle membrature non è valida, ad esempio i giunti saldati, le connessioni bullonate, i piedritti, i fori nelle pareti, la rastrematura della sezione e i carichi concentrati. L'analisi strutturale in questi punti è complessa e richiede un'attenzione particolare. Il comportamento è non lineare e le non linearità devono essere rispettate, ad esempio la resistenza limite del materiale delle piastre, il contatto tra le piastre di estremità o la piastra di base e il blocco di calcestruzzo, le azioni unilaterali di bulloni e ancoraggi, le saldature. I codici di progetto, ad esempio EN1993-1-8, e la letteratura tecnica offrono metodi di soluzione ingegneristica. La loro caratteristica generale è la derivazione per forme strutturali tipiche e carichi semplici. Un metodo utilizzato molto spesso è quello delle componenti.
Metodo delle Componenti
Il metodo delle componenti (MC) risolve il giunto come un sistema di elementi interconnessi: le componenti. Per ogni tipo di giunto viene costruito il modello corrispondente per poter determinare le forze e le sollecitazioni in ogni componente. Si veda la figura seguente.
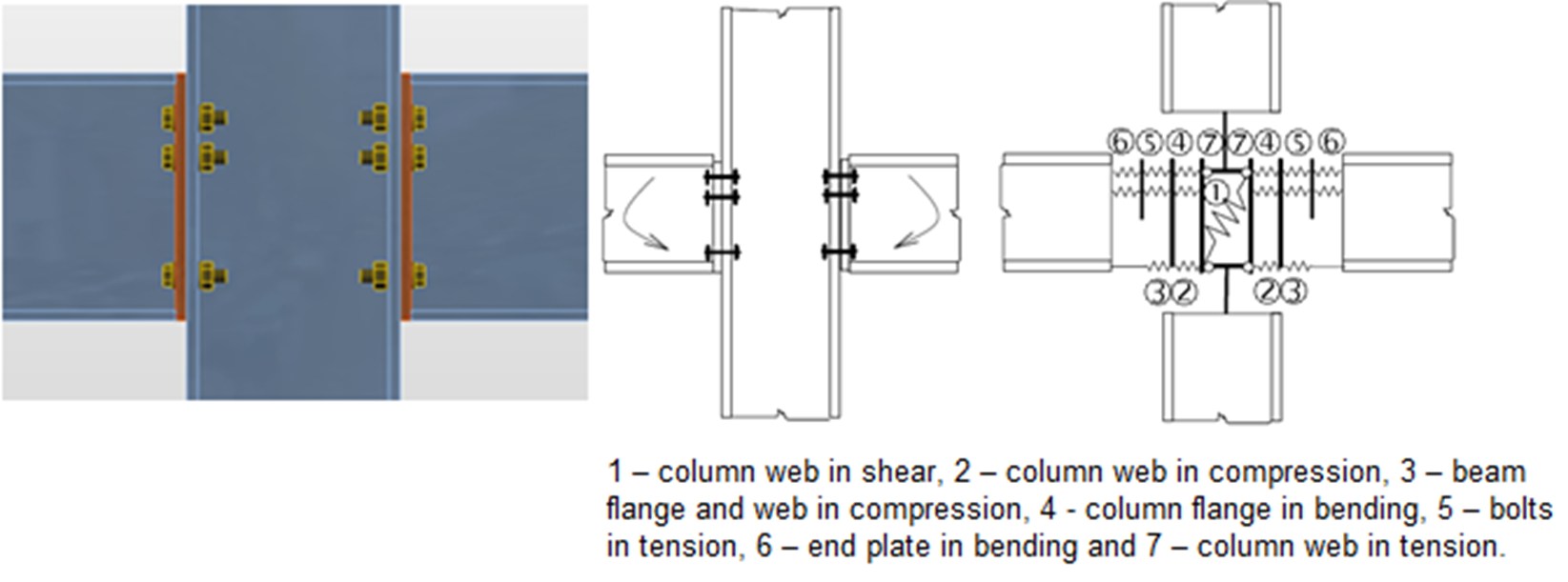
Componenti di un giunto con piastre di estremità bullonate modellate da molle
Ogni componente è verificato separatamente utilizzando le formule corrispondenti. Poiché per ogni tipo di giunto deve essere creato il modello appropriato, l'utilizzo del metodo presenta dei limiti nella risoluzione di giunti di forma generica e con carichi generici.
IDEA StatiCa, insieme a un team di progetto del Dipartimento di Strutture in acciaio e legno della Facoltà di Ingegneria Civile di Praga e dell'Istituto di Strutture in metallo e legno della Facoltà di Ingegneria Civile dell'Università Tecnologica di Brno, ha sviluppato un metodo per la progettazione avanzata di giunti strutturali in acciaio.
Il Modello agli Elementi Finiti Basato sulle Componenti (Component Based Finite Element Model - CBFEM) è:
- Generale al punto da poter essere utilizzato per la maggior parte dei giunti, collegamenti a terra e dettagli nella pratica ingegneristica.
- Semplice e veloce nella pratica quotidiana, al punto da fornire risultati in tempi paragonabili ai metodi e agli strumenti attuali.
- Completo al punto da fornire all'ingegnere strutturale informazioni chiare sul comportamento, le sollecitazioni e le deformazioni dei giunti, e sulle riserve delle singoli componenti nonché sulla sicurezza e affidabilità complessive.
Il metodo CBFEM si basa sull'idea di tenere valide la maggior parte delle parti verificate e molto utili del MC. Il punto debole del MC, ossia la sua generalità nell'analisi delle sollecitazioni dei singoli componenti, è stato sostituito dalla modellazione e dall'analisi con il metodo degli elementi finiti (FEM).
Il FEM è un metodo generale comunemente utilizzato per l'analisi strutturale. L'uso del FEM per la modellazione di giunti di qualsiasi forma risulta ideale (Virdi, 1999). È necessaria l'analisi elastoplastica poiché l'acciaio normalmente si snerva nella struttura. In effetti, i risultati dell'analisi lineare non sono utili al fine della progettazione dei giunti.
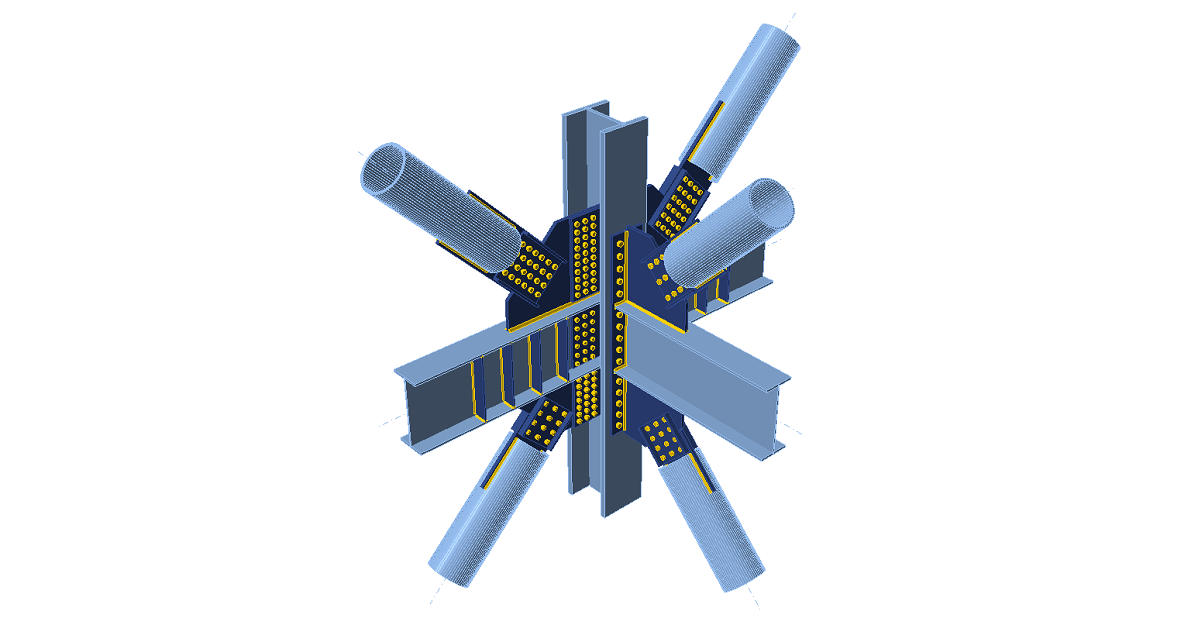
I modelli FEM sono utilizzati per scopi di ricerca sul comportamento dei giunti, e applicano solitamente elementi spaziali e valori misurati delle proprietà dei materiali.
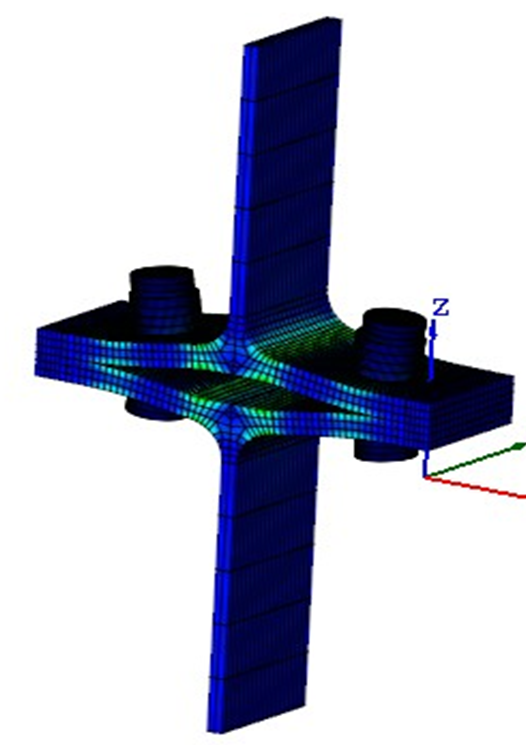
Modello FEM di un giunto a scopo di ricerca. Si avvale di elementi spaziali 3D sia per le piastre che per i bulloni
Sia le anime che le ali degli elementi collegati sono modellate con l’uso di elementi shell nel modello CBFEM, per il quale è disponibile una soluzione nota e verificata.
Gli elementi di fissaggio, ossia bulloni e saldature, sono i più difficili dal punto di vista del modello di analisi. La modellazione di tali elementi nei programmi FEM generali è difficile perché i programmi non offrono le proprietà richieste. Pertanto, è stato necessario sviluppare componenti FEM speciali per modellare il comportamento delle saldature e dei bulloni in un giunto.
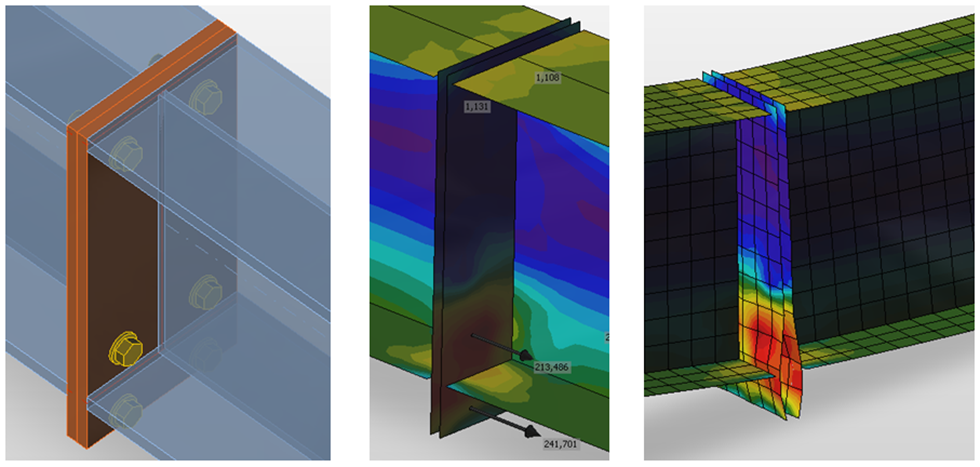
Modello CBFEM di connessione con piastra con piastra bullonata
Nell’analisi di strutture a telaio o a trave primaria in acciaio, i giunti delle membrature sono modellati come punti senza massa. Le equazioni di equilibrio vengono assemblate nei giunti e le forze interne alle estremità delle travi vengono determinate dopo aver risolto l'intera struttura. Infatti, il giunto è caricato da queste forze. La risultante delle forze di tutte le membrature del giunto è pari a zero: l'intero giunto è in equilibrio.
La forma reale di un giunto non è nota nel modello strutturale. L'ingegnere definisce solo se il giunto sia rigido o sia una cerniera.
È necessario creare un modello affidabile di giunto, che rispetti lo stato reale, per progettare il giunto in modo corretto. Nel metodo CBFEM si utilizzano le estremità delle membrature con lunghezza pari a un multiplo di 2-3 dell'altezza massima della sezione. Questi segmenti sono modellati con elementi shell.
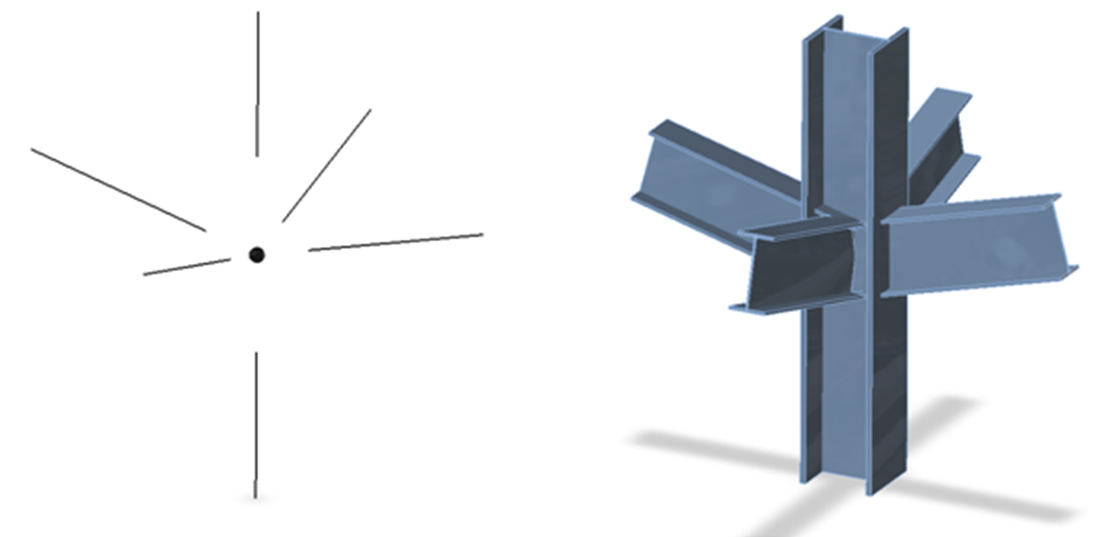
Un giunto teorico (senza massa) e la forma reale del giunto senza le estremità modificate della membratura
Per una maggiore precisione del modello CBFEM, le forze di estremità sulle membrature 1D sono applicate come carichi alle estremità dei segmenti. Le sestine di forze del giunto teorico vengono trasferite all'estremità del segmento; i valori delle forze vengono mantenuti, ma i momenti vengono modificati dalle azioni delle forze sui bracci corrispondenti.
Le estremità dei segmenti in corrispondenza del giunto non sono collegate. La connessione deve essere modellata. Il metodo CBFEM si avvale delle cosiddette operazioni di produzione per modellare la connessione. Le operazioni di produzione sono in particolare: tagli, offset, fori, rinforzi, nervature, piastre di estremità e piatti di giunzione, coprigiunti, fazzoletti e altro. Vengono inoltre aggiunti elementi di fissaggio (saldature e bulloni).
IDEA StatiCa Connection può eseguire due tipi di analisi:
- Analisi lineare per geometria con non linearità del materiale e di contatto per l'analisi delle tensioni e delle deformazioni,
- Analisi degli autovalori per determinare la possibilità di instabilità.
Nel caso delle connessioni, l'analisi non lineare per geometria non è necessaria, a meno che le piastre non siano molto sottili. La snellezza della piastra può essere determinata dall'analisi degli autovalori (instabilità). Per la snellezza limite in cui l'analisi lineare per geometria è ancora sufficiente, si veda il Capitolo 3.9. L'analisi non lineare per geometria non è implementata nel software.
Vuoi migliorare le tue competenze? Visita il nostro Campus
Modello di materiale per il collegamento in acciaio
I diagrammi di materiale più comuni utilizzati nella modellazione agli elementi finiti dell'acciaio strutturale sono il modello idealmente plastico o elastico con incrudimento e il diagramma tensione-deformazione reale. Il diagramma tensione-deformazione reale è calcolato dalle proprietà del materiale degli acciai dolci a temperatura ambiente ottenute nelle prove di trazione. La tensione e la deformazione reali possono essere ottenute come segue:
\[ \sigma_{true}=\sigma (1 + \varepsilon) \]
\[ \varepsilon_{true}=\ln (1 + \varepsilon) \]
dove σtrue è la tensione reale, εtrue la deformazione reale, σ la tensione nominale e ε la deformazione nominale.
Le piastre in IDEA StatiCa Connection sono modellate con materiale elastico-plastico con una pendenza nominale del plateau di snervamento secondo EN1993-1-5, Par. C.6, (2), tan-1 (E/1000). Il comportamento del materiale è basato sul criterio di snervamento di von Mises. Si assume che il materiale sia elastico fino al raggiungimento della resistenza di progetto allo snervamento, fyd.
Il criterio allo stato limite ultimo per le regioni non soggette a instabilità è il raggiungimento del valore limite della deformazione principale di membrana. Si raccomanda il valore del 5 % (ad es. EN1993-1-5, App. C, Par. C.8, Nota 1).
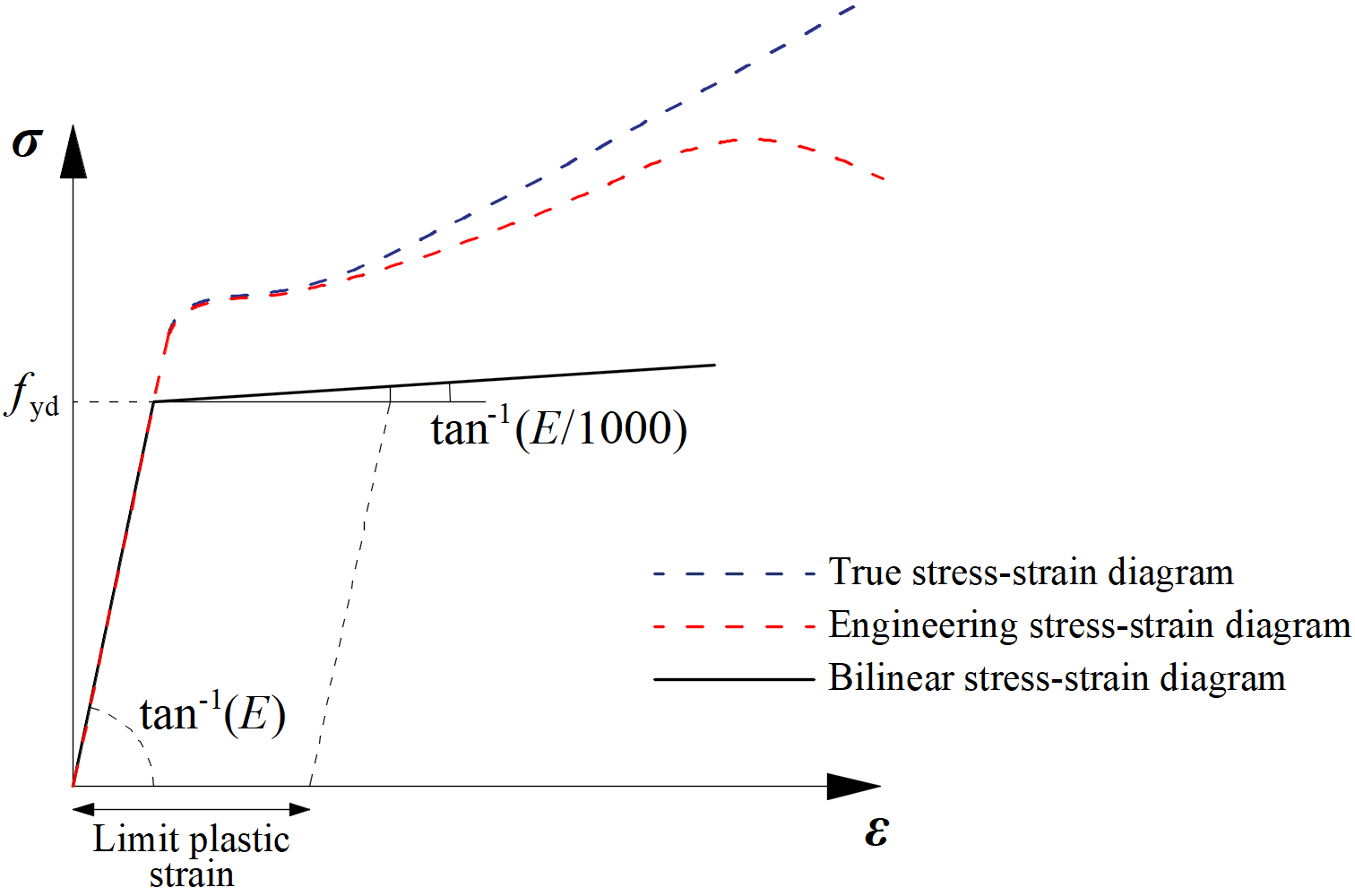
Diagrammi di materiale dell'acciaio nei modelli numerici
Il valore limite della deformazione plastica è spesso oggetto di discussione. In realtà, il carico ultimo ha una bassa sensibilità al valore limite della deformazione plastica quando si utilizza il modello idealmente plastico. Ciò è dimostrato nel seguente esempio di un giunto trave-colonna. Una trave a sezione aperta IPE 180 è collegata a una colonna a sezione aperta HEB 300 e caricata da un momento flettente. L'influenza del valore limite della deformazione plastica sulla resistenza della trave è mostrata nella figura seguente. La deformazione plastica limite varia dal 2 % all'8 %, ma la variazione della resistenza a momento è inferiore al 4 %.
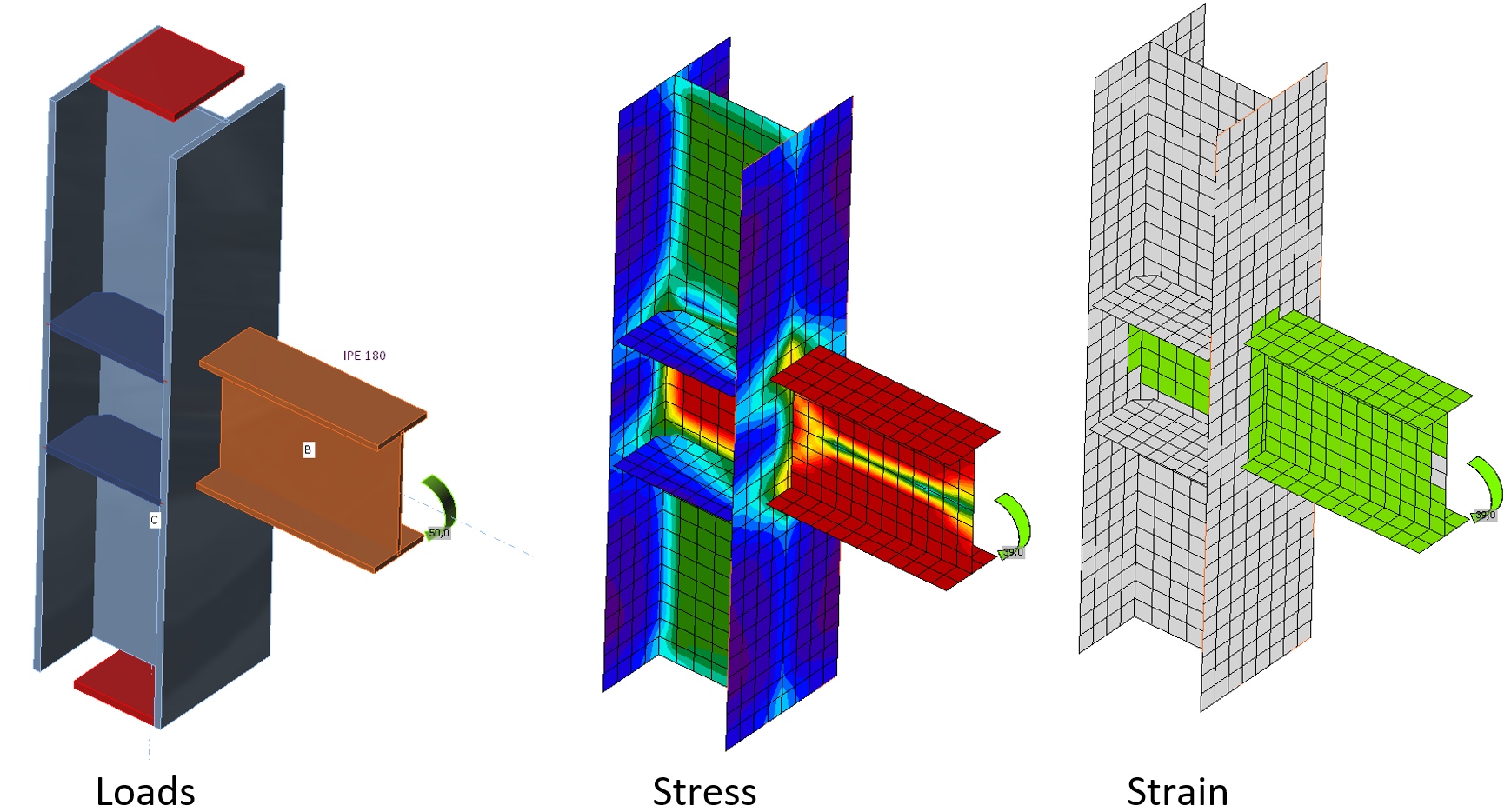
Un esempio di previsione dello stato limite ultimo di un giunto trave-colonna
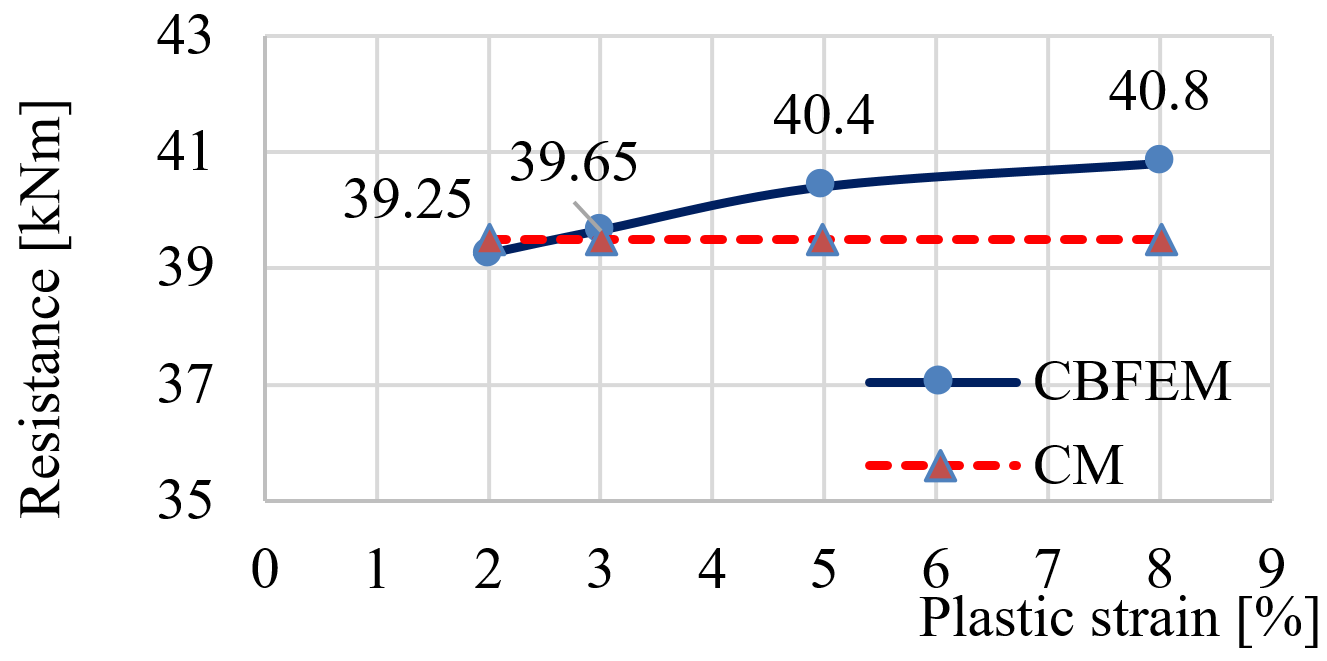
L'influenza del valore limite della deformazione plastica sulla resistenza a momento
Modello di piastra e convergenza della rete
L'aumento del numero di elementi fornisce risultati più precisi, ma a costo di una maggiore richiesta computazionale.
Modello di piastra
Gli elementi shell sono raccomandati per la modellazione delle piastre nell'analisi FEA del collegamento strutturale. Vengono applicati elementi shell quadrangolari a 4 nodi con nodi agli angoli. In ciascun nodo sono considerati sei gradi di libertà: 3 traslazioni (ux, uy, uz) e 3 rotazioni (φx, φy, φz). Le deformazioni dell'elemento sono suddivise nelle componenti membranale e flessionale.
La formulazione del comportamento membranale è basata sul lavoro di Ibrahimbegovic (1990). Vengono considerate le rotazioni perpendicolari al piano dell'elemento. È fornita una formulazione 3D completa dell'elemento. Le deformazioni a taglio fuori piano sono considerate nella formulazione del comportamento flessionale dell'elemento basata sull'ipotesi di Mindlin. Viene applicata una variante stabilizzata interna dell'elemento di piastra quadrangolare di Mindlin con deformazione a taglio costante lungo il bordo. Gli elementi sono ispirati agli elementi MITC4; si veda Dvorkin (1984). Lo shell è suddiviso in cinque strati di integrazione attraverso lo spessore della piastra in ciascun punto di integrazione e il comportamento plastico viene analizzato in ciascun punto. Questo metodo è denominato integrazione di Gauss–Lobatto. Lo stadio elastico-plastico non lineare del materiale viene analizzato in ciascuno strato sulla base delle deformazioni note. Vengono mostrate solo le tensioni e le deformazioni massime di tutti gli strati.
Convergenza della rete
Esistono alcuni criteri per la generazione della rete nel modello di collegamento. La verifica normativa del collegamento dovrebbe essere indipendente dalla dimensione degli elementi. La generazione della rete su una piastra separata è priva di problemi. Occorre prestare attenzione a geometrie complesse come pannelli irrigiditi, T-stub e piastre di base. Per geometrie complesse è opportuno eseguire un'analisi di sensibilità considerando la discretizzazione della rete.
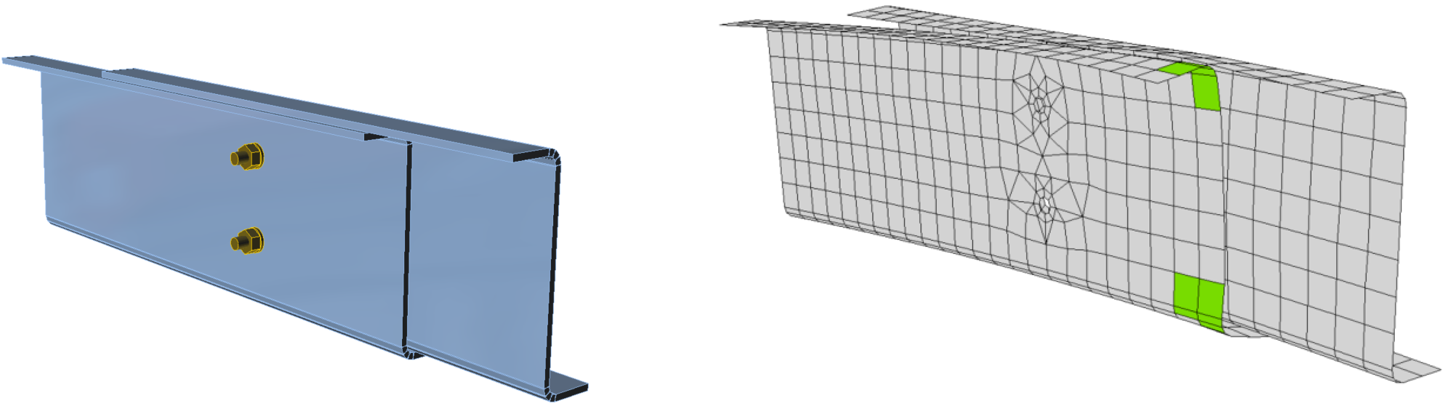
Tutte le piastre di una sezione trasversale di trave hanno una suddivisione comune in elementi. La dimensione degli elementi finiti generati è limitata. La dimensione minima dell'elemento è impostata a 10 mm e la dimensione massima a 50 mm (può essere impostata in Code setup). Le reti su ali e anime sono indipendenti l'una dall'altra. Il numero predefinito di elementi finiti è impostato a 8 elementi per altezza della sezione trasversale, come mostrato nella figura seguente. L'utente può modificare i valori predefiniti in Code setup.
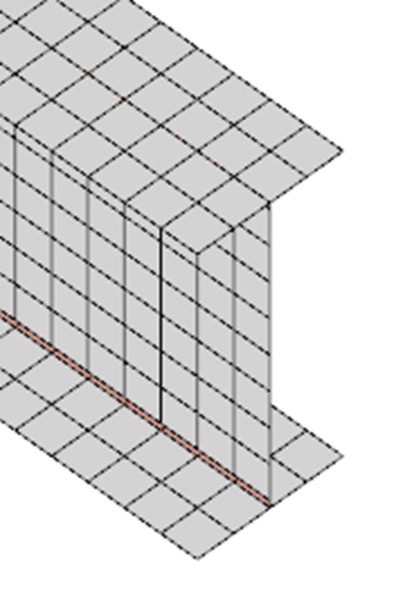
La rete su una trave con vincoli tra l'anima e la piastra dell'ala
La rete delle piastre d'estremità è separata e indipendente dalle altre parti del collegamento. La dimensione predefinita degli elementi finiti è impostata a 16 elementi per altezza della sezione trasversale, come mostrato nella figura.
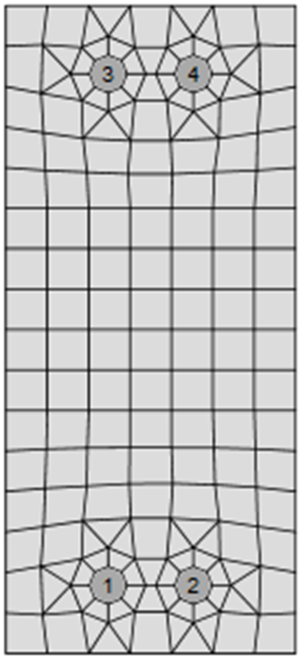
La rete su una piastra d'estremità con 7 elementi lungo la sua larghezza
Il seguente esempio di un giunto trave-colonna mostra l'influenza della dimensione della rete sulla resistenza a momento. Una trave a sezione aperta IPE 220 è collegata a una colonna a sezione aperta HEA 200 e caricata da un momento flettente, come mostrato nella figura seguente. Il componente critico è il pannello d'anima della colonna a taglio. Il numero di elementi finiti lungo l'altezza della sezione trasversale varia da 4 a 40 e i risultati vengono confrontati. Le linee tratteggiate rappresentano la differenza del 5%, 10% e 15%. Si raccomanda di suddividere l'altezza della sezione trasversale in 8 elementi.
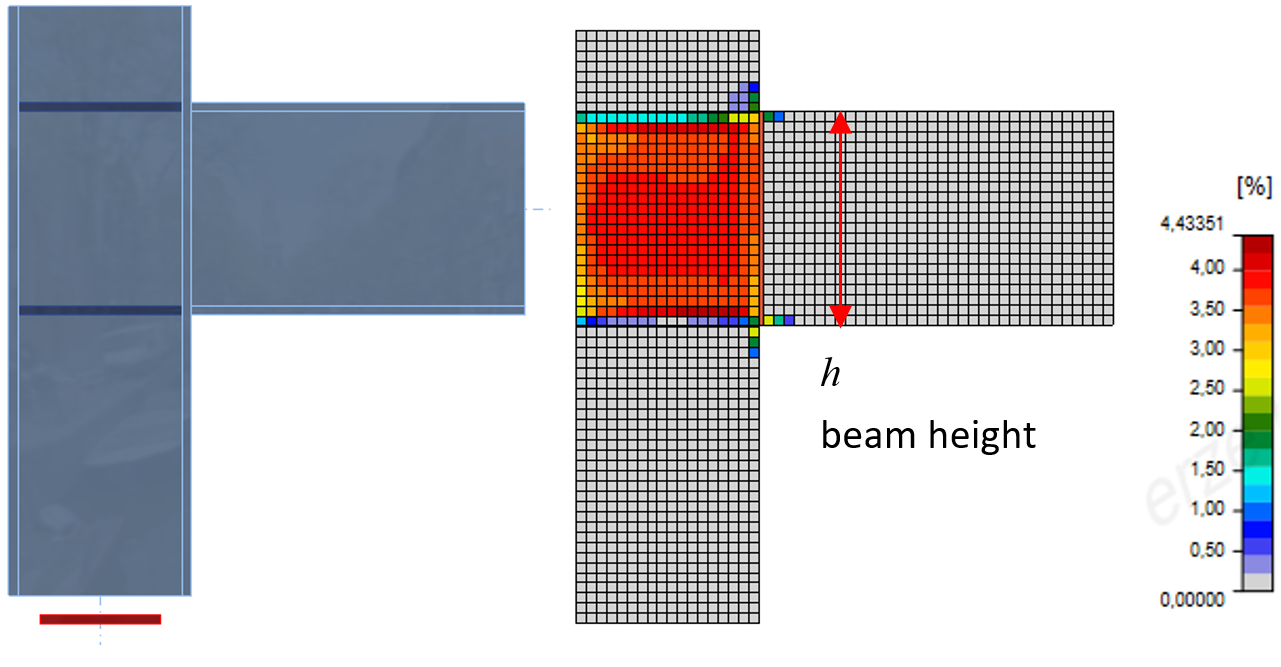
Modello di giunto trave-colonna e deformazioni plastiche allo stato limite ultimo
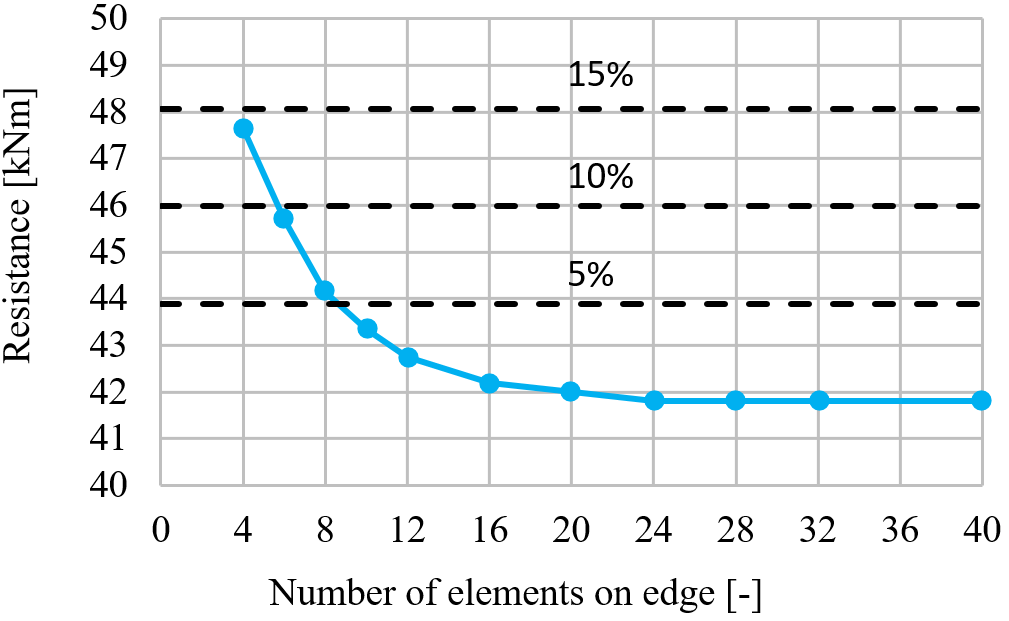
L'influenza del numero di elementi sulla resistenza a momento
Viene presentato lo studio di sensibilità della rete di un irrigidimento snello compresso del pannello d'anima della colonna. Il numero di elementi lungo la larghezza dell'irrigidimento varia da 4 a 20. Il primo modo di instabilità e l'influenza del numero di elementi sulla resistenza all'instabilità e sul carico critico sono mostrati nella figura seguente. Viene visualizzata la differenza del 5% e del 10%. Si raccomanda di utilizzare 8 elementi lungo la larghezza dell'irrigidimento.
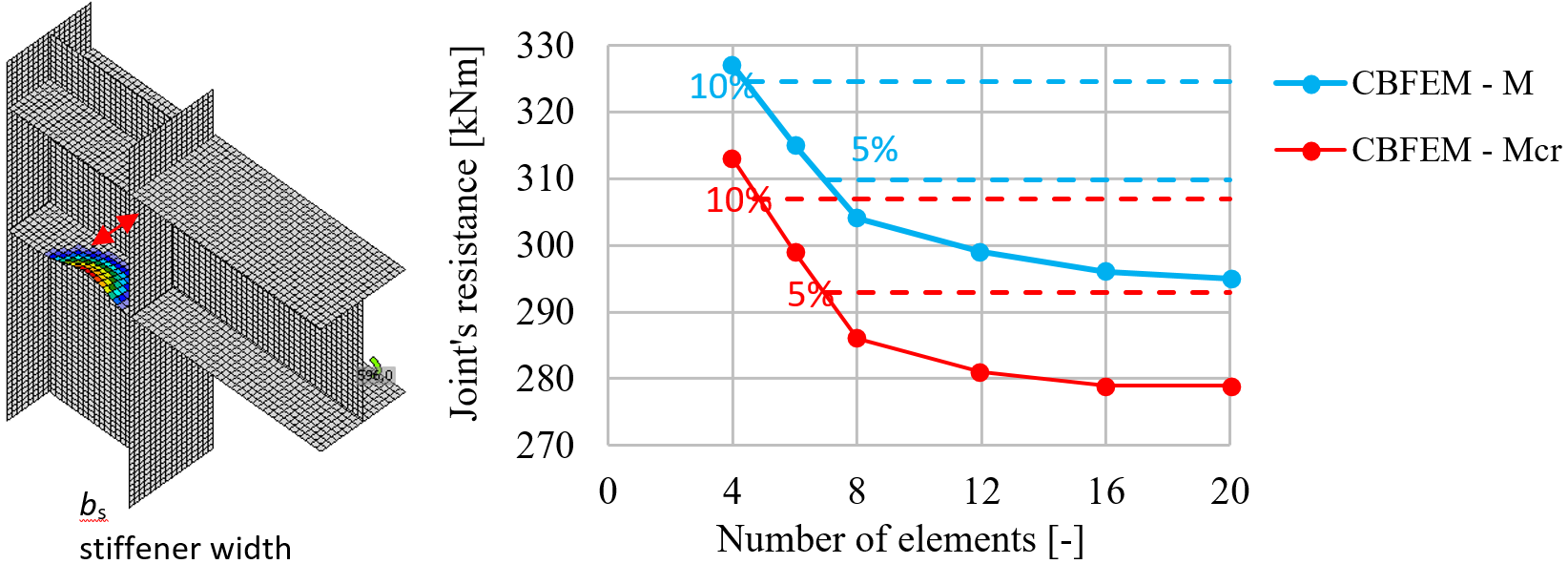
Il primo modo di instabilità e l'influenza del numero di elementi lungo l'irrigidimento sulla resistenza a momento
Viene presentato lo studio di sensibilità della rete di un T-stub in trazione. La metà della larghezza dell'ala è suddivisa in 8-40 elementi e la dimensione minima dell'elemento è impostata a 1 mm. L'influenza del numero di elementi sulla resistenza del T-stub è mostrata nella figura seguente. Le linee tratteggiate rappresentano la differenza del 5%, 10% e 15%. Si raccomanda di utilizzare 16 elementi sulla metà della larghezza dell'ala.
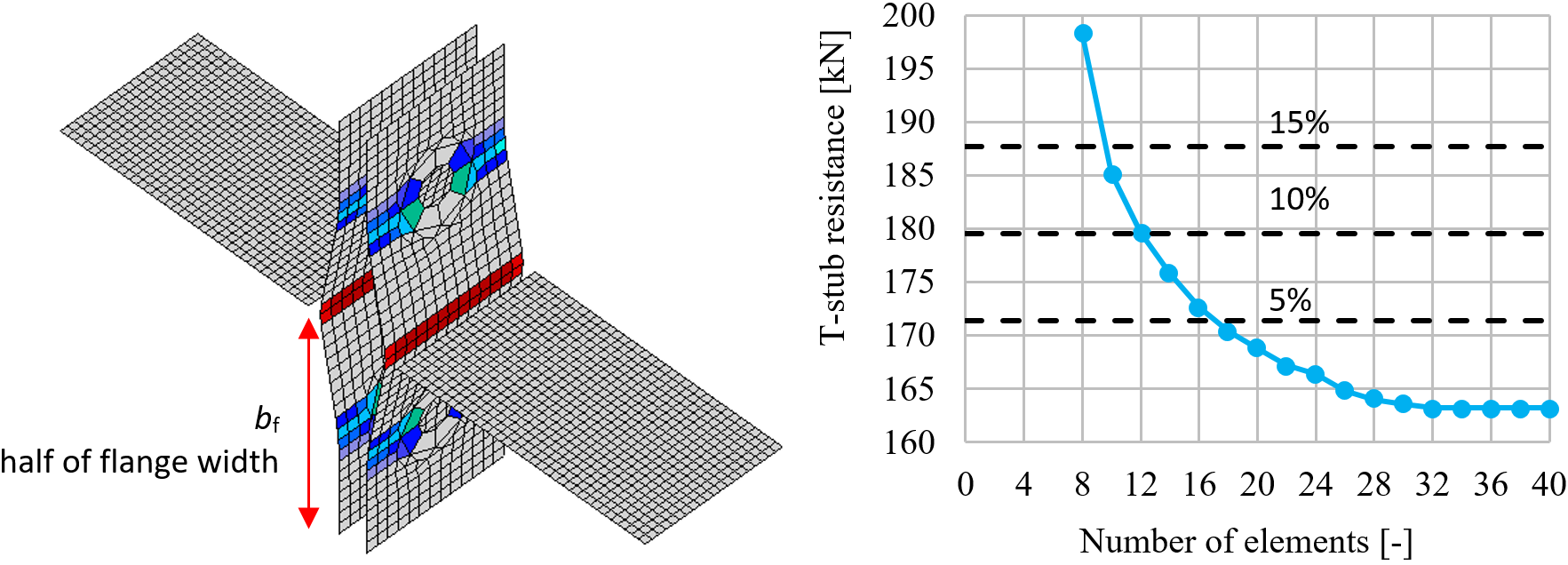
L'influenza del numero di elementi sulla resistenza del T-stub
Contatti tra piastre di collegamento in acciaio
Il metodo delle penalità standard è consigliato per la modellazione del contatto tra piastre. Se viene rilevata la penetrazione di un nodo nella superficie di contatto opposta, viene aggiunta una rigidezza di penalità tra il nodo e la piastra opposta. La rigidezza di penalità è controllata da un algoritmo euristico durante l'iterazione non lineare per ottenere una migliore convergenza. Il solutore rileva automaticamente il punto di penetrazione e risolve la distribuzione della forza di contatto tra il nodo penetrato e i nodi sulla piastra opposta. Ciò consente la creazione di contatti tra reti diverse, come mostrato. Il vantaggio del metodo delle penalità è l'assemblaggio automatico del modello. Il contatto tra le piastre ha un impatto significativo sulla ridistribuzione delle forze nel collegamento.
Esempio di separazione delle piastre in contatto tra l'anima e le ali di due arcarecci a sezione Z sovrapposti
È possibile aggiungere contatti tra
- due superfici,
- due bordi,
- bordo e superficie.

Esempio di contatto bordo-bordo tra la mensola di appoggio e la piastra d'estremità
Esempio di contatto bordo-superficie tra l'ala inferiore della trave e l'ala del pilastro
Le tensioni nei contatti possono essere visualizzate e i valori sono mostrati nella tabella di verifica delle piastre. Tuttavia, le tensioni di contatto sono solo informative e non vengono utilizzate in alcuna verifica. Inoltre, la tensione nello spessore degli elementi shell non viene considerata.
Analisi dei collegamenti saldati
Esistono diverse opzioni per trattare le saldature nei modelli numerici. Le grandi deformazioni rendono l'analisi meccanica più complessa, ed è possibile utilizzare diverse descrizioni della rete, diverse variabili cinetiche e cinematiche, e modelli costitutivi. Vengono generalmente utilizzati diversi tipi di modelli geometrici 2D e 3D e quindi elementi finiti con la loro applicabilità per diversi livelli di accuratezza. Il modello di materiale più utilizzato è il comune modello di plasticità indipendente dalla velocità basato sul criterio di snervamento di von Mises. Vengono descritti due approcci utilizzati per le saldature. Le tensioni residue e le deformazioni causate dalla saldatura non sono considerate nel modello di progetto.
Il carico viene trasmesso attraverso vincoli forza-deformazione basati sulla formulazione Lagrangiana alla piastra opposta. Il collegamento è denominato vincolo multi-punto (MPC) e mette in relazione i nodi degli elementi finiti di un bordo di piastra con un altro. I nodi degli elementi finiti non sono collegati direttamente. Il vantaggio di questo approccio è la capacità di collegare reti con densità diverse. Il vincolo consente di modellare la superficie della linea mediana delle piastre collegate con l'offset, che rispetta la reale configurazione della saldatura e lo spessore di gola. La distribuzione del carico nella saldatura è derivata dall'MPC, quindi le tensioni sono calcolate nella sezione di gola. Questo è importante per la distribuzione delle tensioni nella piastra sotto la saldatura e per la modellazione dei profili a T.
Ridistribuzione plastica delle tensioni nelle saldature
Il modello con soli vincoli multi-punto non rispetta la rigidezza della saldatura, e la distribuzione delle tensioni è conservativa. I picchi di tensione che compaiono alle estremità dei bordi delle piastre, negli angoli e nelle arrotondature, governano la resistenza lungo l'intera lunghezza della saldatura. Per eliminare l'effetto, viene aggiunto un elemento elastoplastico speciale tra le piastre. L'elemento rispetta lo spessore di gola della saldatura, la posizione e l'orientamento. Il solido di saldatura equivalente viene inserito con le corrispondenti dimensioni della saldatura. Viene applicata l'analisi del materiale non lineare e viene determinato il comportamento elastoplastico nel solido di saldatura equivalente. Lo stato di plasticità è controllato dalle tensioni nella sezione di gola della saldatura. I picchi di tensione vengono ridistribuiti lungo la parte più lunga della lunghezza della saldatura.
Il modello elastoplastico delle saldature fornisce valori reali di tensione, e non è necessario mediare o interpolare la tensione. I valori calcolati nell'elemento di saldatura più sollecitato vengono utilizzati direttamente per le verifiche del componente di saldatura. In questo modo, non è necessario ridurre la resistenza delle saldature multi-orientate, delle saldature a flangie non irrigidite o delle saldature lunghe.
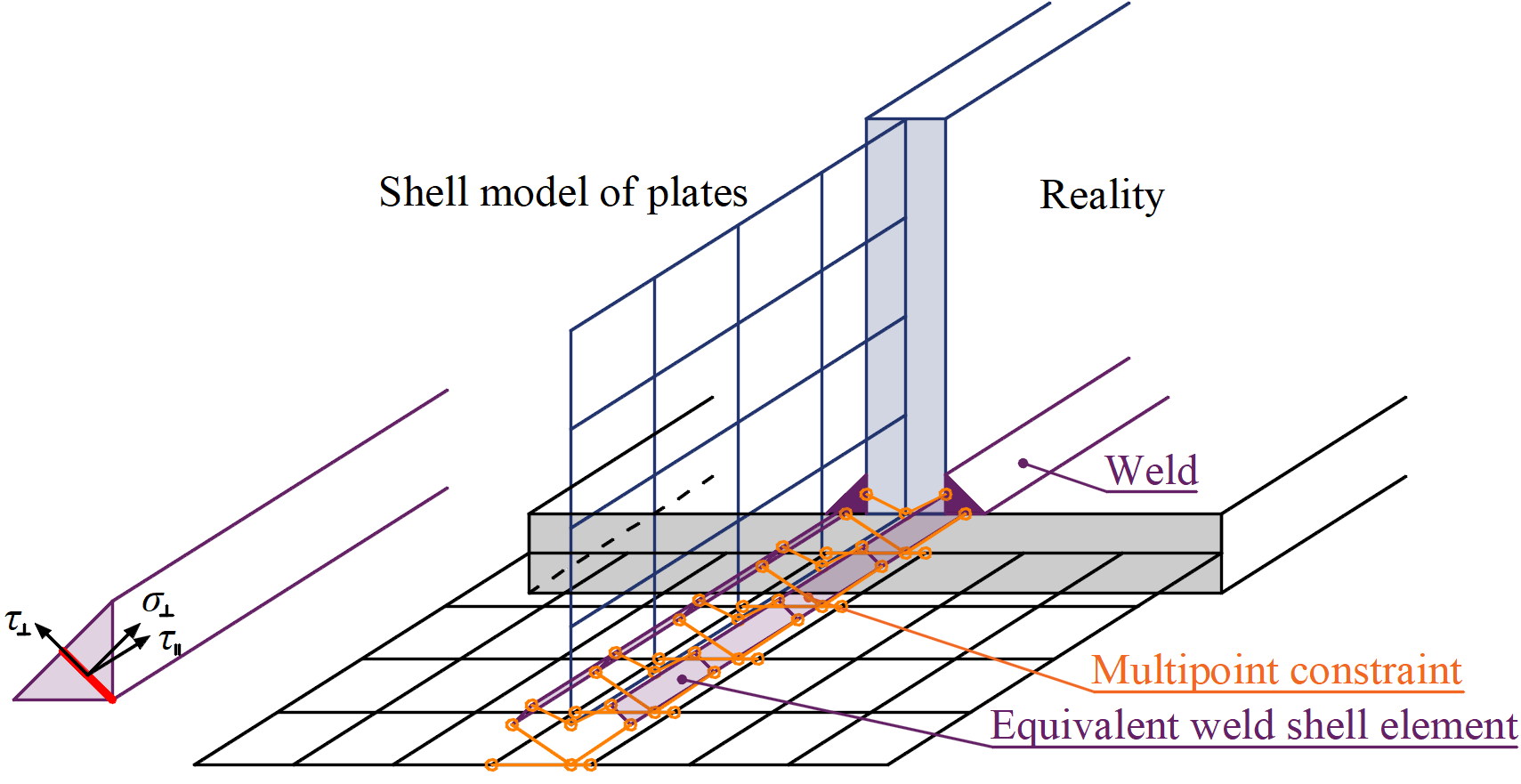
Vincolo tra elemento di saldatura e nodi della rete
Le saldature generali, utilizzando la ridistribuzione plastica, possono essere impostate come continue, parziali e intermittenti. Le saldature continue si estendono per l'intera lunghezza del bordo, quelle parziali consentono agli utenti di impostare offset da entrambi i lati del bordo, e le saldature intermittenti possono essere ulteriormente impostate con una lunghezza e un'interasse definiti.
Bulloni e collegamenti con bulloni pretensionati
Bulloni
Nel Metodo degli Elementi Finiti basato sui Componenti (CBFEM), il bullone con il suo comportamento a trazione, taglio e rifollamento è il componente descritto da molle non lineari dipendenti. L'insieme bullone comprende bullone, rondella e dado ed è simulato da una molla non lineare, elementi a corpo rigido ed elementi di contatto.
Bullone a trazione
Il bullone a trazione è descritto da una molla con la sua rigidezza assiale iniziale, resistenza di progetto, inizializzazione dello snervamento e capacità di deformazione. La rigidezza assiale iniziale è derivata analiticamente nella linea guida VDI2230 e in Agerskov (1976).
\[D_{Lb} =\frac{L_s+0.4d_b}{EA_{s}}+ \frac{0.85d_b}{EA_{t}}\]
\[A_{pp}=\frac{0.75D_H(L_w-D_H)}{D_{W1}^2-D_{W2}^2}\]
\[A_{P1}=\frac{\pi}{4}(D_H^2-D_{W1}^2)\]
\[A_{P2}=\frac{1}{2}(D_{W2}^2-D_H^2)\tan^{-1}A_{pp}\]
\[A_P=A_{P1}+A_{P2}\]
\[D_{LW}=\frac{L_W}{EA_P}\]
\[k=\frac{1}{D_{LB}+D_{LW}}\]
dove:
- \(d_b\) – diametro del bullone
- \(D_H\) – diametro della testa del bullone
- \(D_{W1}\) – diametro interno della rondella
- \(D_{W2}\) – diametro esterno della rondella
- \(L_W\) – somma degli spessori delle rondelle
- \(L_s\) – lunghezza di serraggio del bullone
- \(A_{s}\) – area lorda del bullone
- \(A_{t}\) – area resistente a trazione del bullone
- \(E\) – modulo di elasticità di Young
Il modello corrisponde ai dati sperimentali; si veda Gödrich et al. (2014). Per l'inizializzazione dello snervamento e la capacità di deformazione, si assume che la deformazione plastica avvenga solo nella parte filettata del gambo del bullone.
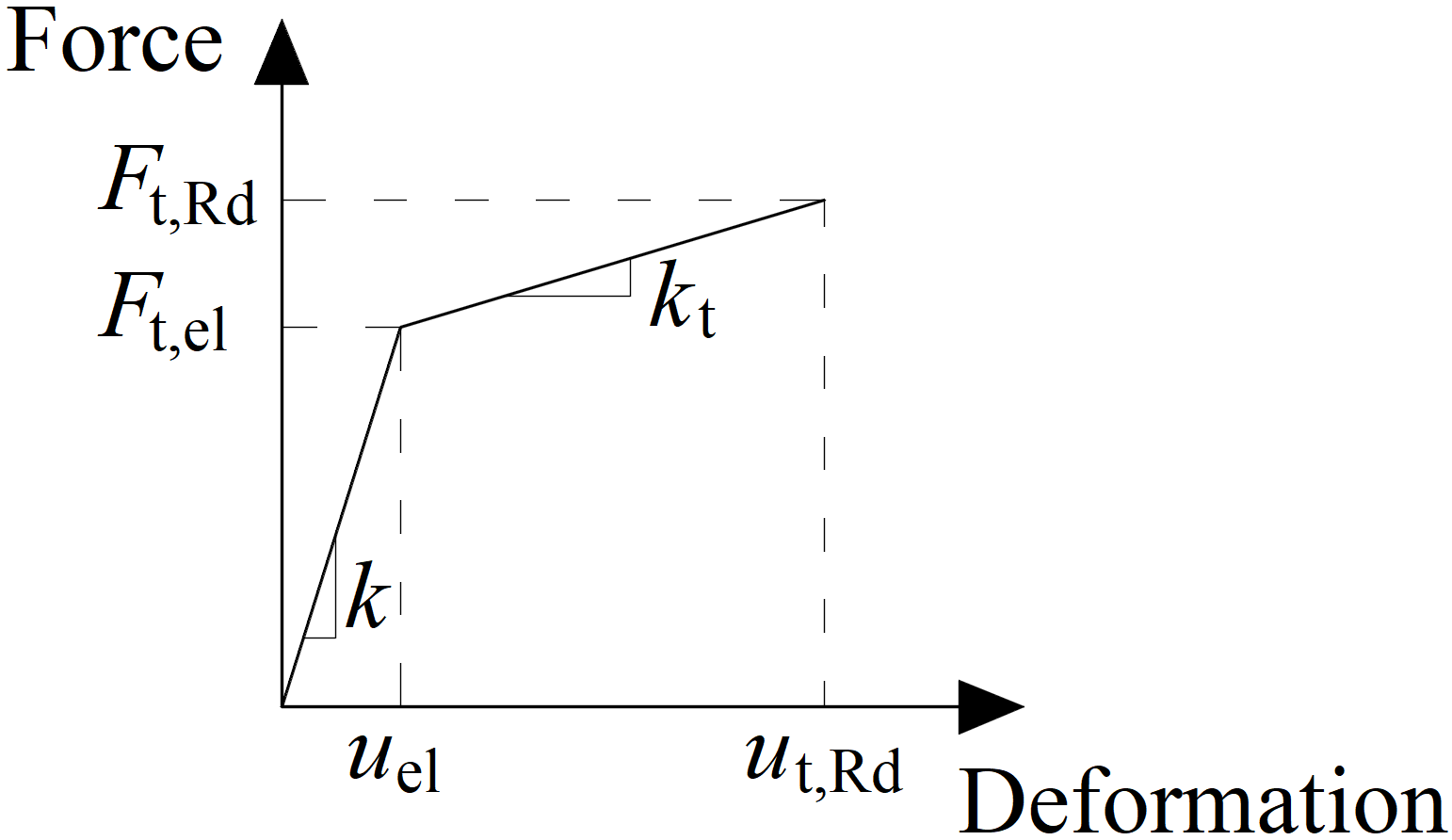
Diagramma forza-deformazione per il rifollamento della piastra
Il diagramma forza-deformazione è costruito utilizzando le seguenti equazioni:
Rigidezza plastica:
\[ k_t = c_1 k \]
Forza al limite elastico:
\[ F_{t,el} = \frac{F_{t,Rd}}{c_1 c_2 - c_1 +1} \]
Deformazione al limite elastico:
\[ u_{el} = \frac{ F_{t,el} }{k} \]
Deformazione al limite plastico:
\[ u_{t,Rd} = c_2 u_{el} \]
\[ c_1 = \frac{f_{ub} - f_{yb}}{\frac{1}{4} A E - f_{yb}} \]
\[ c_2 = \frac{AE}{4 f_{yb}} \]
dove:
- \(F_{t,Rd}\) – valore di progetto della resistenza del bullone a trazione
- \(f_{yb}\) – tensione di snervamento del bullone
- \(f_{ub}\) – tensione ultima del bullone
- \(A\) – allungamento a rottura
Bullone a taglio
Solo la forza di compressione viene trasferita dal gambo del bullone alla piastra nel foro del bullone. Essa è modellata tramite collegamenti di interpolazione tra i nodi del gambo e i nodi del bordo del foro. La rigidezza di deformazione dell'elemento shell che modella le piastre distribuisce le forze tra i bulloni e simula il rifollamento adeguato della piastra.
I fori dei bulloni sono considerati standard (predefinito) o assolati (impostabile nell'editor della piastra). I bulloni in fori standard possono trasferire la forza di taglio in tutte le direzioni; i bulloni in fori assolati hanno una direzione esclusa e possono muoversi liberamente in questa direzione selezionata.
La rigidezza iniziale e la resistenza di progetto di un bullone a taglio sono definite dalle seguenti formule:
\[k_{el}=\frac{1}{\frac{1}{k_{11}}+\frac{1}{k_{12}}}\]
\[k_{11} = \frac{8d_b^2f_{ub}}{d_{M16}}\]
\[k_{12}=12k_td_bf_{up}\]
\[k_t=\min \left ( 2.5,\, \frac{1.5t_{min}}{d_{M16}} \right ) \]
\[k_{pl}=\frac{k_{el}}{1000}\]
dove:
- \(d_b\) – diametro del bullone
- \(f_{ub}\) – tensione ultima del bullone
- \(d_{M16}=16 \textrm{ mm}\) – diametro del bullone di riferimento M16
- \(f_{up}\) – resistenza ultima della piastra collegata
- \(t_{min}\) – spessore minimo della piastra collegata
La molla che rappresenta il bullone a taglio ha un comportamento bilineare forza-deformazione. L'inizializzazione dello snervamento è prevista a:
\[F_{V,el}=0.999 F_{V,Rd}\]
La capacità di deformazione è considerata come:
\[\delta_{pl}=\delta_{el}\]
dove:
- \(F_{V,el}\) – resistenza elastica del bullone a taglio
- \(F_{V,Rd}\) – resistenza del bullone a taglio
- \(\delta_{el}\) – deformazione elastica del bullone a taglio
Interazione tra trazione e taglio
L'interazione tra la forza assiale e la forza di taglio può essere introdotta direttamente nel modello di analisi. La distribuzione delle forze riflette meglio la realtà (si veda il diagramma allegato). I bulloni con un'elevata forza di trazione assorbono una minore forza di taglio e viceversa.
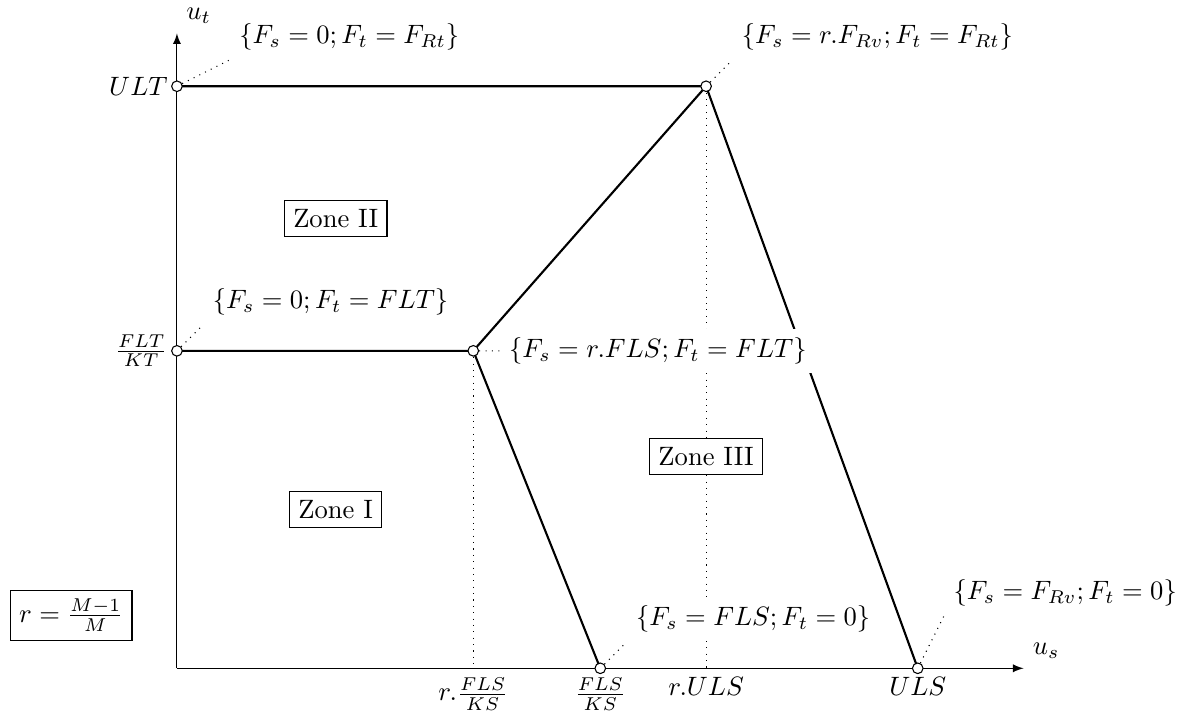
Esempio di interazione tra forza assiale e forza di taglio (EC)
Bulloni pretensionati
I bulloni pretensionati vengono utilizzati nei casi in cui è necessario ridurre al minimo le deformazioni. Il modello a trazione del bullone è lo stesso dei bulloni standard. La forza di taglio non viene trasferita tramite rifollamento, ma tramite attrito tra le piastre serrate.
La resistenza di progetto allo scorrimento di un bullone pretensionato è influenzata da una forza di trazione applicata.
IDEA StatiCa Connection verifica lo stato limite di pre-scorrimento dei bulloni pretensionati. Se si verifica uno scorrimento, i bulloni non soddisfano la verifica. In tal caso, lo stato limite post-scorrimento deve essere verificato come una verifica standard a rifollamento dei bulloni, in cui i fori dei bulloni sono sollecitati a rifollamento e i bulloni a taglio.
L'utente può decidere quale stato limite verificare: la resistenza allo scorrimento principale oppure lo stato post-scorrimento a taglio dei bulloni. Le due verifiche su un singolo bullone non vengono combinate in un'unica soluzione. Si assume che il bullone abbia un comportamento standard dopo uno scorrimento principale e possa essere verificato con la procedura standard a rifollamento.
Il carico a momento del collegamento ha una piccola influenza sulla capacità a taglio. Tuttavia, la verifica a attrito su ciascun bullone viene semplicemente risolta separatamente. Questa verifica è implementata nel componente FEM del bullone. Non è disponibile in modo generale alcuna informazione su se il carico di trazione esterno di ciascun bullone provenga dal momento flettente o dal carico di trazione del collegamento.
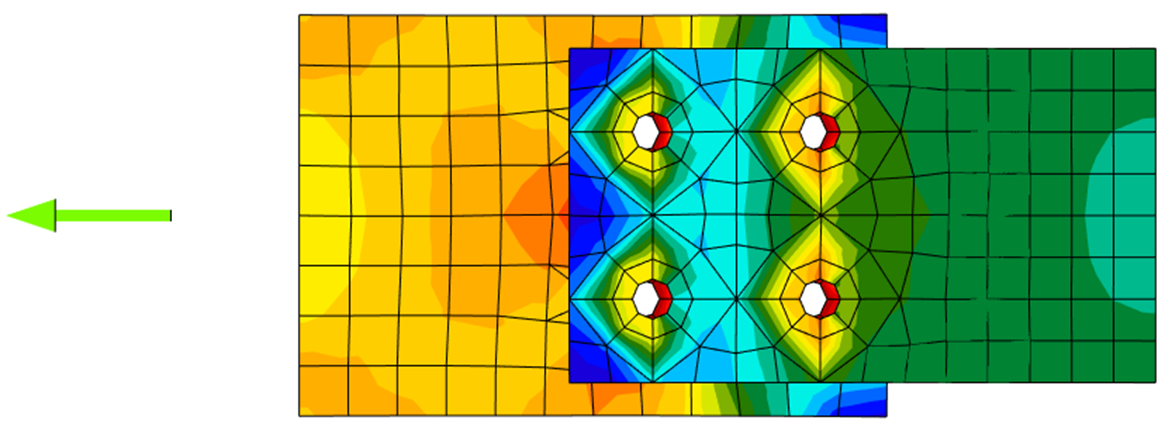
Distribuzione delle tensioni in un collegamento a taglio con bulloni standard
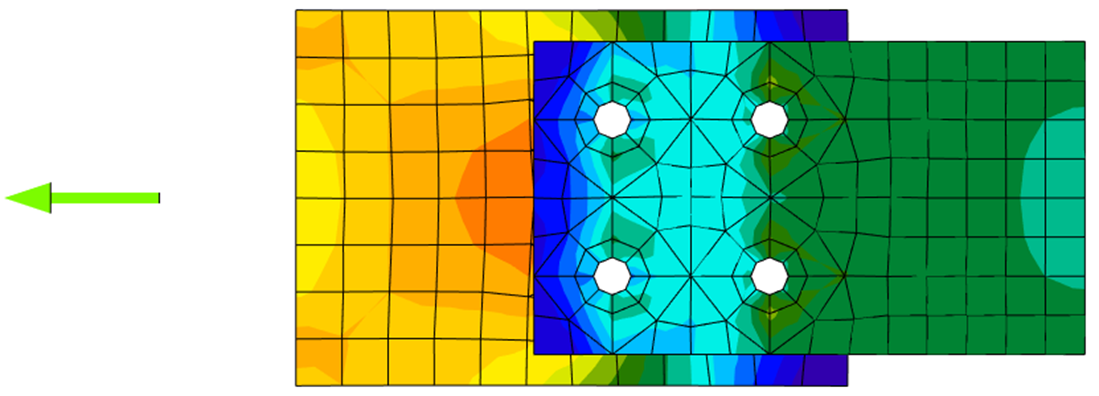
Distribuzione delle tensioni in un collegamento a taglio con bulloni antisdrucciolo
Bulloni di ancoraggio
Il bullone di ancoraggio è modellato con procedure simili a quelle dei bulloni strutturali. Il bullone è fisso su un lato del blocco di calcestruzzo. La sua lunghezza, Lb, utilizzata per il calcolo della rigidezza del bullone, è assunta come somma di metà dello spessore del dado, dello spessore della rondella, tw, dello spessore della piastra di base, tbp, dello spessore della malta o del giunto, tg, e della lunghezza libera inglobata nel calcestruzzo, assunta pari a 8d dove d è il diametro del bullone. Il fattore 8 è modificabile nella configurazione del codice. Questo valore è conforme al Metodo delle Componenti (EN1993-1-8); la lunghezza libera inglobata nel calcestruzzo può essere modificata nella configurazione del codice. La rigidezza a trazione è calcolata come k = E As / Lb. Il diagramma carico-deformazione del bullone di ancoraggio è mostrato nella figura seguente. I valori secondo ISO 898:2009 sono riassunti nella tabella e nelle formule seguenti.
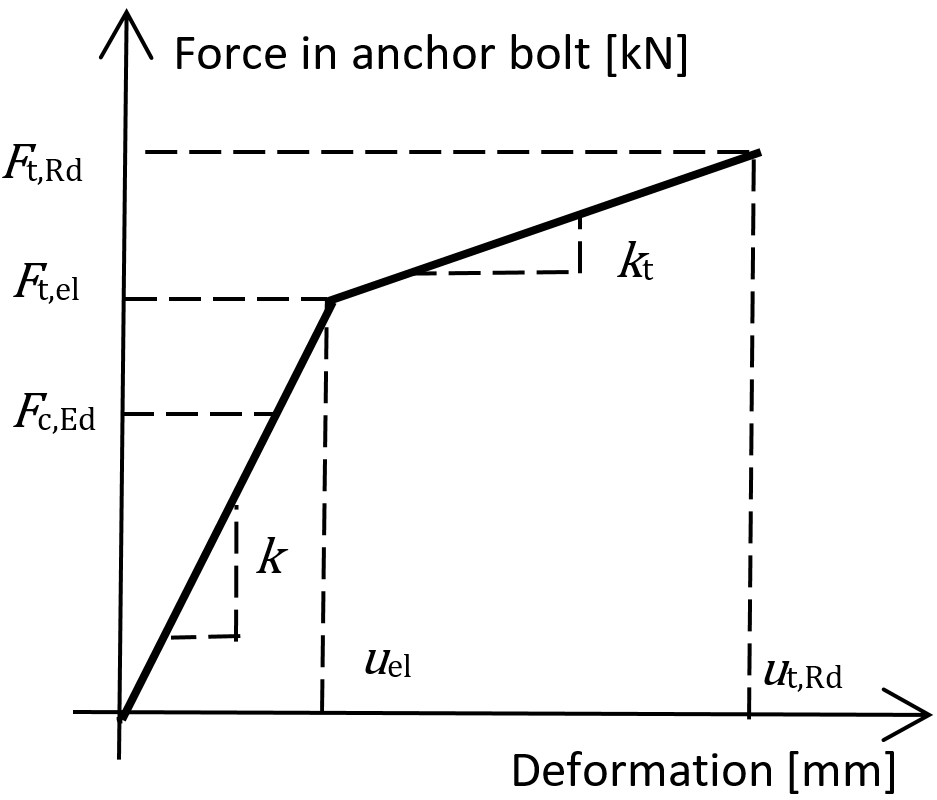
Diagramma carico-deformazione del bullone di ancoraggio
\[ F_{t,el}=\frac{F_{t,Rd}}{c_1 c_2 - c_1 + 1} \]
\[ k_t = c_1 k; \qquad c_1 = \frac{R_m - R_e}{\left ( \frac{1}{4} A - \frac{R_e}{E} \right )E} \]
\[ u_{el} = \frac{F_{t,el}}{k}; \qquad u_{t,Rd} = c_2 u_{el}; \qquad c_2 = \frac{AE}{4R_e} \]
dove:
- A – allungamento
- E – modulo di elasticità di Young
- Ft,Rd – resistenza a trazione dell'acciaio dell'ancorante
- Rm – resistenza ultima (a trazione)
- Re – tensione di snervamento
La rigidezza del bullone di ancoraggio a taglio è assunta pari alla rigidezza del bullone strutturale a taglio.
Bulloni di ancoraggio con distanziatore
Gli ancoranti con distanziatore possono essere verificati come fase costruttiva prima della sigillatura della base del pilastro oppure come stato permanente. L'ancorante con distanziatore è progettato come elemento a barra caricato da forza di taglio, momento flettente e forza di compressione o di trazione. L'ancorante è fisso su entrambi i lati; un lato si trova a 0,5×d al di sotto del livello del calcestruzzo, l'altro lato è al centro dello spessore della piastra. La lunghezza di instabilità è assunta in modo conservativo pari al doppio della lunghezza dell'elemento a barra. Viene utilizzato il modulo di resistenza plastico. Le forze nell'ancorante con distanziatore sono determinate mediante analisi agli elementi finiti. Il momento flettente dipende dal rapporto di rigidezza tra gli ancoranti e la piastra di base.
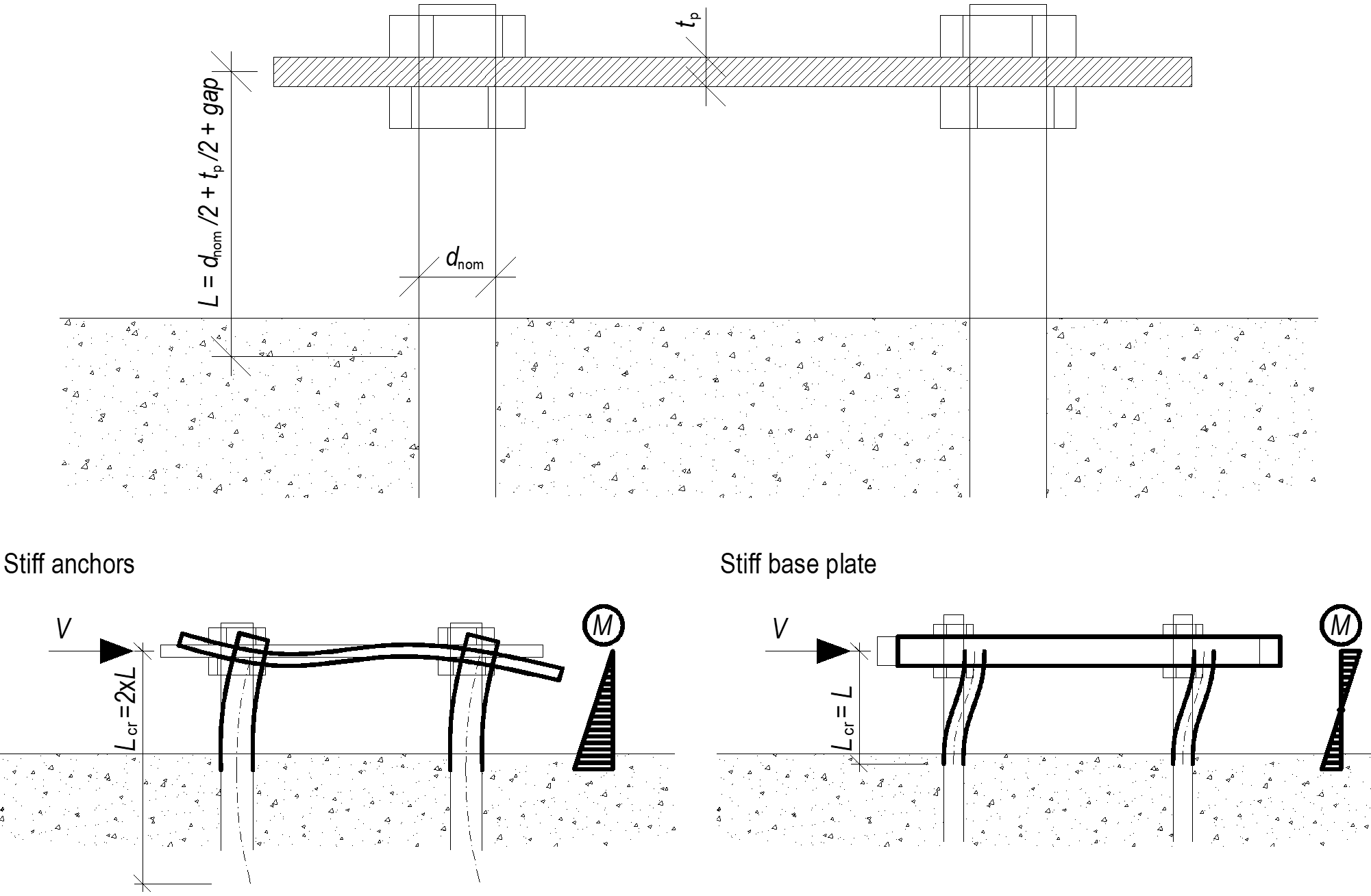
Ancoranti con distanziatore – determinazione del braccio della leva e delle lunghezze di instabilità; ancoranti rigidi sono un'ipotesi cautelativa
Modello strutturale di un blocco in calcestruzzo
Modello di progetto
Nel CBFEM, è conveniente semplificare il blocco in calcestruzzo come elementi di contatto 2D. Il collegamento tra il calcestruzzo e la piastra di base resiste solo alla compressione. La compressione è trasferita tramite il modello di sottosuolo di Winkler-Pasternak, che rappresenta le deformazioni del blocco in calcestruzzo. La forza di trazione tra la piastra di base e il blocco in calcestruzzo è assorbita dai bulloni di ancoraggio. La forza di taglio è trasferita per attrito tra la piastra di base e il blocco in calcestruzzo, tramite chiavetta a taglio e per flessione dei bulloni di ancoraggio e attrito. La resistenza dei bulloni a taglio è valutata analiticamente. L'attrito e la chiavetta a taglio sono modellati come un vincolo completo a punto singolo nel piano del contatto piastra di base–calcestruzzo.
Rigidezza deformativa
La rigidezza del blocco in calcestruzzo può essere stimata per la progettazione delle basi di colonna come un emisfero elastico. Un modello di sottosuolo di Winkler-Pasternak è comunemente utilizzato per il calcolo semplificato delle fondazioni. La rigidezza del sottosuolo è determinata utilizzando il modulo di elasticità del calcestruzzo e l'altezza efficace del sottosuolo come:
\[ k = \frac{E_c}{(\alpha_1 + \upsilon) \sqrt{\frac{A_{eff}}{A_{ref}}}} \left( \frac{1}{\frac{h}{a_2 d} + a_3}+a_4 \right) \]
dove:
- k – rigidezza del sottosuolo in calcestruzzo a compressione
- Ec – modulo di elasticità del calcestruzzo
- υ – coefficiente di Poisson del blocco in calcestruzzo
- Aeff – area efficace a compressione
- Aref = 1 m2 – area di riferimento
- d – larghezza della piastra di base
- h – altezza del blocco in calcestruzzo
- a1 = 1,65; a2 = 0,5; a3 = 0,3; a4 = 1,0 – coefficienti
Nella formula devono essere utilizzate le unità SI; l'unità risultante è N/m3.
Trasferimento del carico di taglio alla piastra di base
Il carico di taglio alla piastra di base può essere trasferito con tre modalità:
- Attrito
- Chiavetta a taglio
- Ancoraggi
Gli utenti possono scegliere la modalità modificando l'operazione della piastra di base. Nessuna combinazione di modalità è consentita nel software; tuttavia, EN 1993-1-8 – Art. 6.2.2 e Fib 58 – Capitolo 4.2 consentono la combinazione del trasferimento del taglio tramite ancoraggi e attrito a determinate condizioni. In generale, è conservativo trascurare l'attrito nella progettazione dell'ancoraggio, sebbene in alcuni casi possa portare a una sottostima della fessurazione del calcestruzzo allo stato limite di esercizio. Di norma, la resistenza per attrito dovrebbe essere trascurata se:
- lo spessore dello strato di malta supera la metà del diametro dell'ancorante,
- la capacità di ancoraggio è governata da una condizione di bordo ravvicinato,
- l'ancoraggio è destinato a resistere ai carichi sismici.
La combinazione con una chiavetta a taglio non dovrebbe mai essere consentita a causa della compatibilità delle deformazioni.
Trasferimento del carico di taglio per attrito
La resistenza a taglio è uguale al fattore di sicurezza di resistenza moltiplicato per il coefficiente di attrito modificabile nella configurazione normativa e per il carico di compressione. Il carico di compressione include tutte le forze; ad esempio, nel caso di una base di colonna caricata da una forza di compressione e da un momento flettente, il carico di compressione utilizzato per la resistenza a taglio per attrito potrebbe essere superiore alla forza di compressione applicata.
Trasferimento del carico di taglio tramite chiavetta a taglio
La chiavetta a taglio è simulata come un troncone corto inglobato nel calcestruzzo sotto la piastra di base. Si stima che il carico di taglio venga trasferito tramite una distribuzione di carico uniforme agente sull'intera porzione della chiavetta a taglio immersa nel blocco in calcestruzzo, ovvero tutti i nodi della chiavetta a taglio al di sotto della superficie del calcestruzzo sono uniformemente caricati. Si assume che la porzione della chiavetta a taglio al di sopra della superficie del calcestruzzo nella malta non trasferisca il carico di taglio.
Si tenga presente che il braccio della leva tra il carico di taglio applicato (alla piastra di base) e la resistenza a taglio (metà altezza della chiavetta a taglio immersa nel calcestruzzo) genera un momento flettente che deve essere trasferito dalla forza di compressione nel calcestruzzo e dalle forze di trazione negli ancoraggi.
La chiavetta a taglio è composta da elementi finiti a guscio e viene verificata come una piastra ordinaria. Anche le saldature della chiavetta a taglio alla piastra di base sono verificate con le procedure standard in IDEA StatiCa Connection. Il calcolo manuale di solito assume la teoria della trave per la chiavetta a taglio, sebbene non sia accurato poiché il rapporto lunghezza/larghezza è molto piccolo per la chiavetta a taglio. Pertanto, potrebbe esserci una differenza significativa tra IDEA StatiCa Connection e il calcolo manuale.
Trasferimento del carico di taglio tramite ancoraggi
La resistenza a taglio è determinata dalla resistenza a taglio degli ancoraggi. La resistenza dell'acciaio degli ancoraggi presenta una curva carico-deformazione elastoplastica, ma le modalità di rottura del calcestruzzo sono considerate perfettamente fragili.
Modello di analisi di IDEA StatiCa
Modello di analisi del giunto in acciaio
Il metodo CBFEM (Component Based Finite Element Model) consente un'analisi rapida di giunti di diverse forme e configurazioni. Il modello è composto da elementi a cui viene applicato il carico e da operazioni di lavorazione (inclusi gli elementi di irrigidimento), che servono a collegare gli elementi tra loro. Gli elementi non devono essere confusi con le operazioni di lavorazione, poiché i loro bordi di taglio sono collegati tramite vincoli rigidi al nodo di collegamento, quindi non si deformano correttamente se utilizzati al posto delle operazioni di lavorazione (elementi di irrigidimento).
Il modello FEM analizzato viene generato automaticamente. Il progettista non crea il modello FEM, ma crea il giunto utilizzando operazioni di lavorazione – vedere la figura.
Operazioni/elementi di lavorazione che possono essere utilizzati per costruire il giunto
Ogni operazione di lavorazione aggiunge nuovi elementi al collegamento – tagli, piastre, bulloni, saldature.
Elementi portanti e vincoli
Un elemento del giunto è sempre impostato come "portante". Tutti gli altri elementi sono "collegati". L'elemento portante può essere scelto dal progettista. L'elemento portante può essere "continuo" o "terminato" nel giunto. Gli elementi "terminati" sono vincolati a un'estremità, mentre gli elementi "continui" sono vincolati a entrambe le estremità.
Gli elementi collegati possono essere di diversi tipi, in base al carico che l'elemento può sopportare:
- Tipo N-Vy-Vz-Mx-My-Mz – l'elemento è in grado di trasferire tutte e 6 le componenti delle forze interne
- Tipo N-Vy-Mz – l'elemento è in grado di trasferire solo i carichi nel piano XY – forze interne N, Vy, Mz
- Tipo N-Vz-My – l'elemento è in grado di trasferire solo i carichi nel piano XZ – forze interne N, Vz, My
- Tipo N-Vy-Vz – l'elemento è in grado di trasferire solo la forza normale N e le forze di taglio Vy e Vz
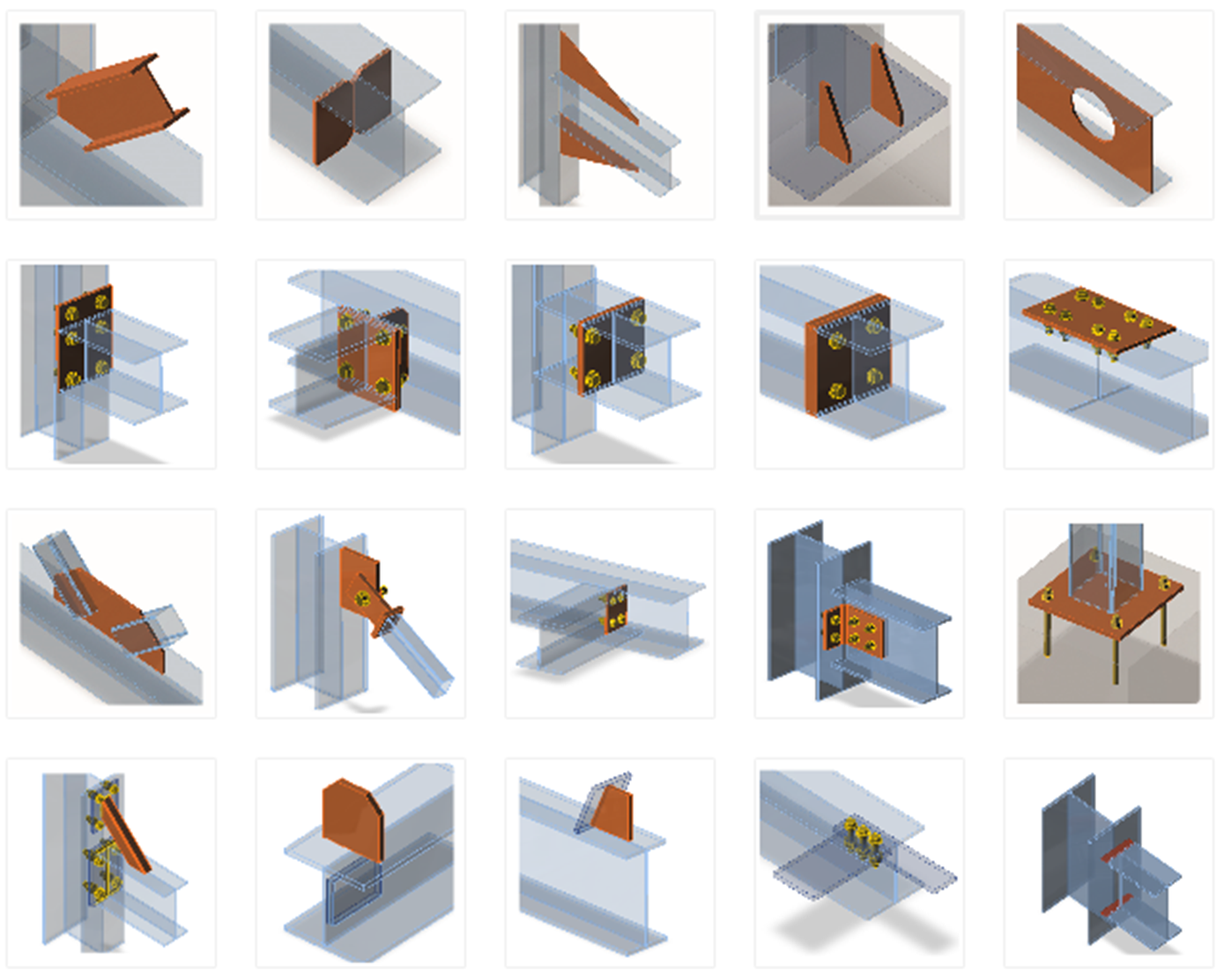
Il collegamento piastra su piastra trasferisce tutte le componenti delle forze interne
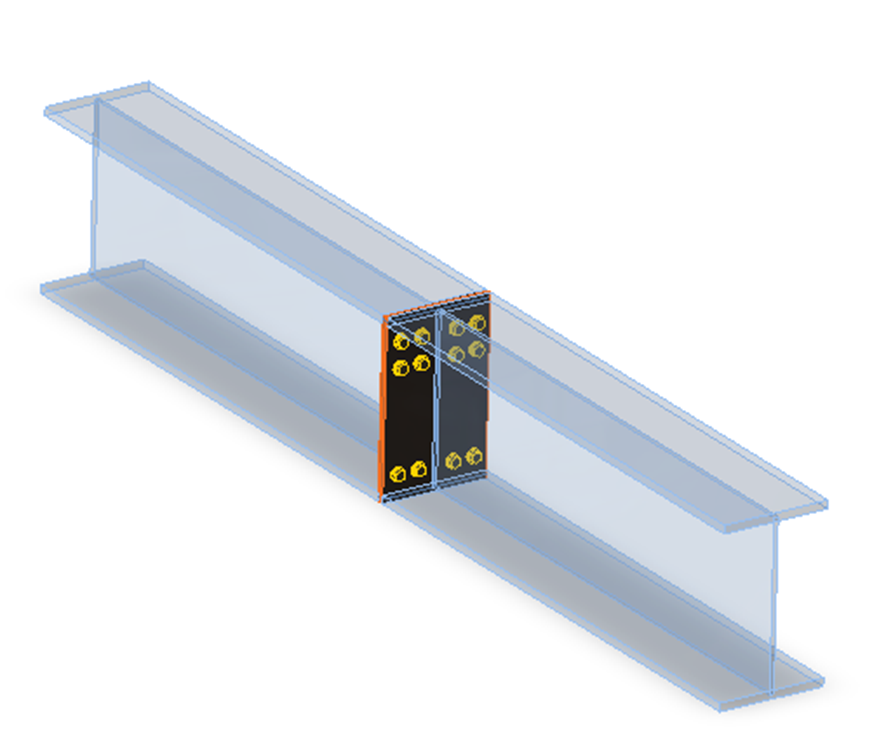
Il collegamento con piastra d'anima può trasferire solo i carichi nel piano XZ – forze interne N, Vz, My
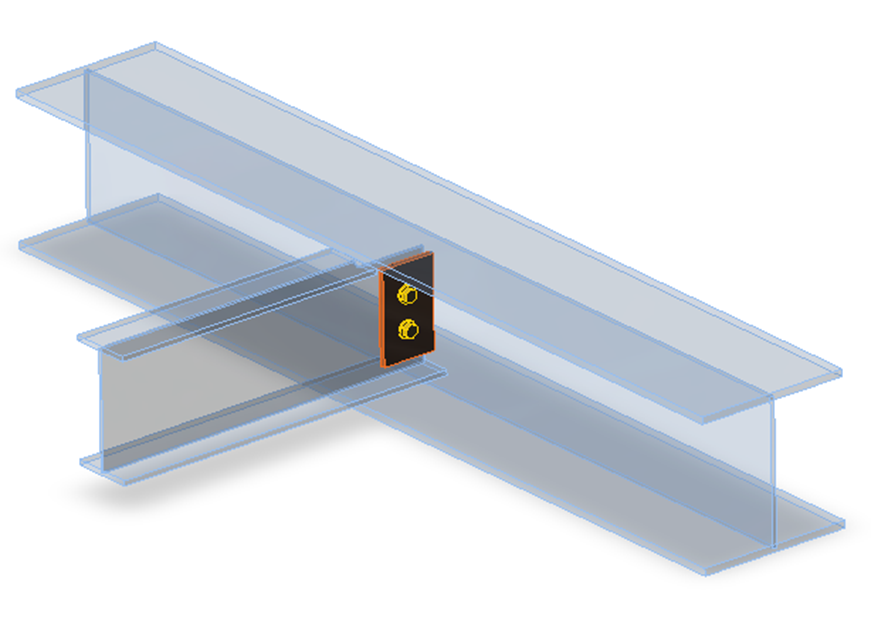
Collegamento con piastra di nodo – il collegamento di un elemento reticolare può trasferire solo la forza assiale N e le forze di taglio Vy e Vz
Ogni giunto si trova in stato di equilibrio durante l'analisi della struttura intelaiata. Se le forze di estremità dei singoli elementi vengono applicate al modello CBFEM di dettaglio, lo stato di equilibrio è soddisfatto anch'esso. Pertanto, non sarebbe necessario definire i vincoli nel modello di analisi. Tuttavia, per ragioni pratiche, il vincolo che impedisce tutte le traslazioni è definito alla prima estremità dell'elemento portante. Ciò non influenza né lo stato di tensione né le forze interne nel giunto, ma solo la rappresentazione delle deformazioni.
Alle estremità degli elementi collegati vengono definiti tipi di vincolo appropriati, rispettando il tipo dei singoli elementi, per prevenire l'insorgere di meccanismi instabili.
La lunghezza predefinita di ciascun elemento è pari al doppio della sua altezza. La lunghezza di un elemento dovrebbe essere almeno 1 volta l'altezza dell'elemento dopo l'ultima operazione di lavorazione (saldatura, apertura, irrigidimento, ecc.), per garantire deformazioni corrette dopo i vincoli rigidi che collegano l'estremità tagliata di un elemento al nodo di collegamento.
Equilibrio del nodo nel modello FEM 3D
I carichi in qualsiasi nodo del modello strutturale devono essere in equilibrio. Eventuali forze non bilanciate sono assorbite dai vincoli. Si raccomanda di utilizzare una combinazione di carichi anziché un inviluppo delle forze interne.
Ogni nodo del modello FEM 3D deve essere in equilibrio. Il requisito di equilibrio è corretto; tuttavia, non è necessario per la verifica di giunti semplici. Un elemento del giunto è sempre "portante" e gli altri sono collegati. Se si verifica solo il collegamento degli elementi collegati, non è necessario mantenere l'equilibrio. Pertanto, sono disponibili due modalità di inserimento dei carichi:
- Semplificata – in questa modalità, l'elemento portante è vincolato (elemento continuo su entrambi i lati) e il carico non è definito sull'elemento
- Avanzata (esatta con verifica dell'equilibrio) – l'elemento portante è vincolato a un'estremità, i carichi sono applicati a tutti gli elementi e l'equilibrio deve essere trovato
La modalità può essere cambiata nel gruppo della barra multifunzione Carichi in equilibrio.

La differenza tra le modalità è illustrata nel seguente esempio di collegamento a T. La trave è caricata dal momento flettente di estremità di 41 kNm. È presente anche una forza normale di compressione di 100 kN nel pilastro. Nel caso della modalità semplificata, la forza normale non viene presa in considerazione perché il pilastro è vincolato su entrambe le estremità. Il programma mostra solo l'effetto del momento flettente della trave. Gli effetti della forza normale vengono analizzati solo nella modalità completa e sono mostrati nei risultati.
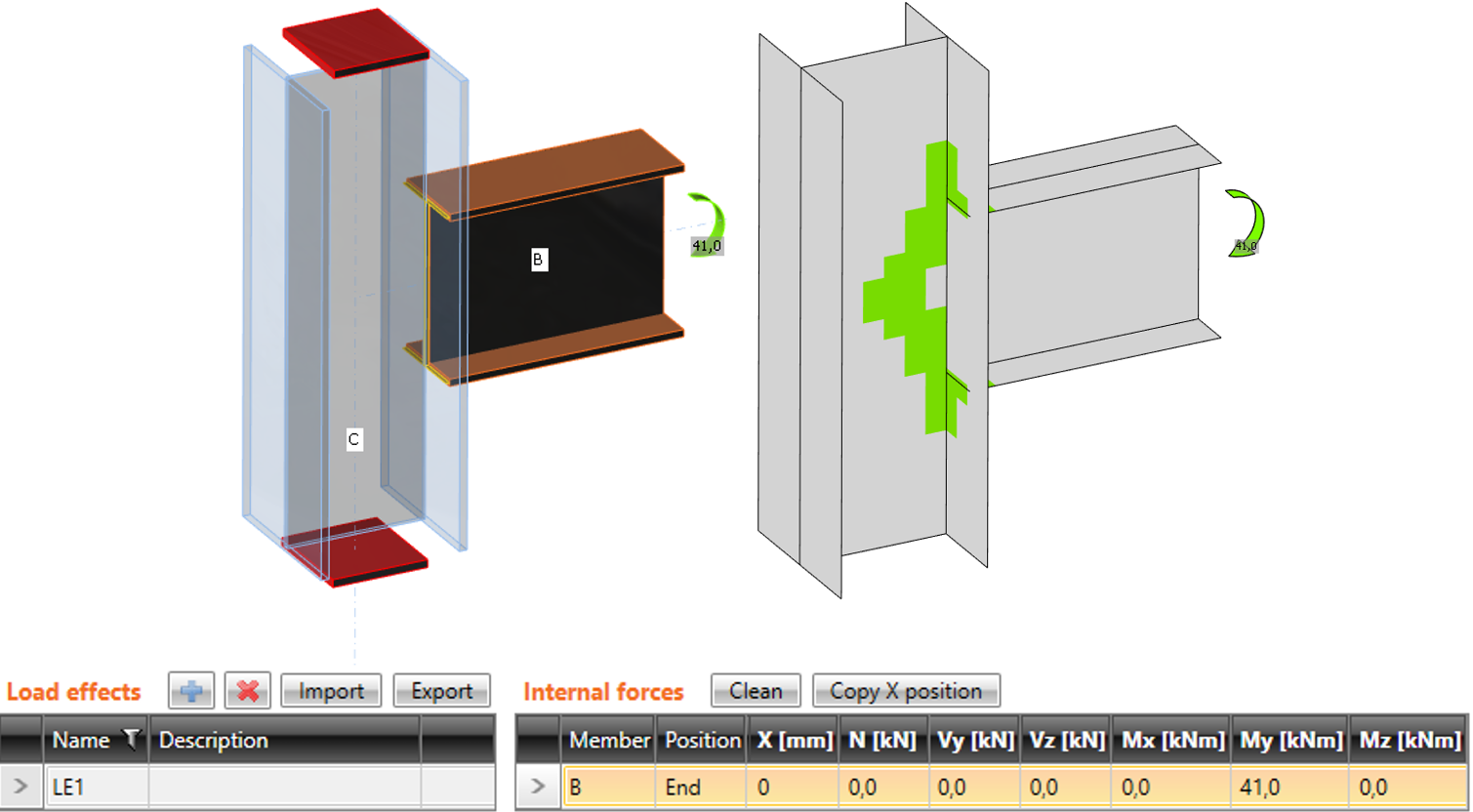
Inserimento semplificato: la forza normale nel pilastro NON viene presa in considerazione
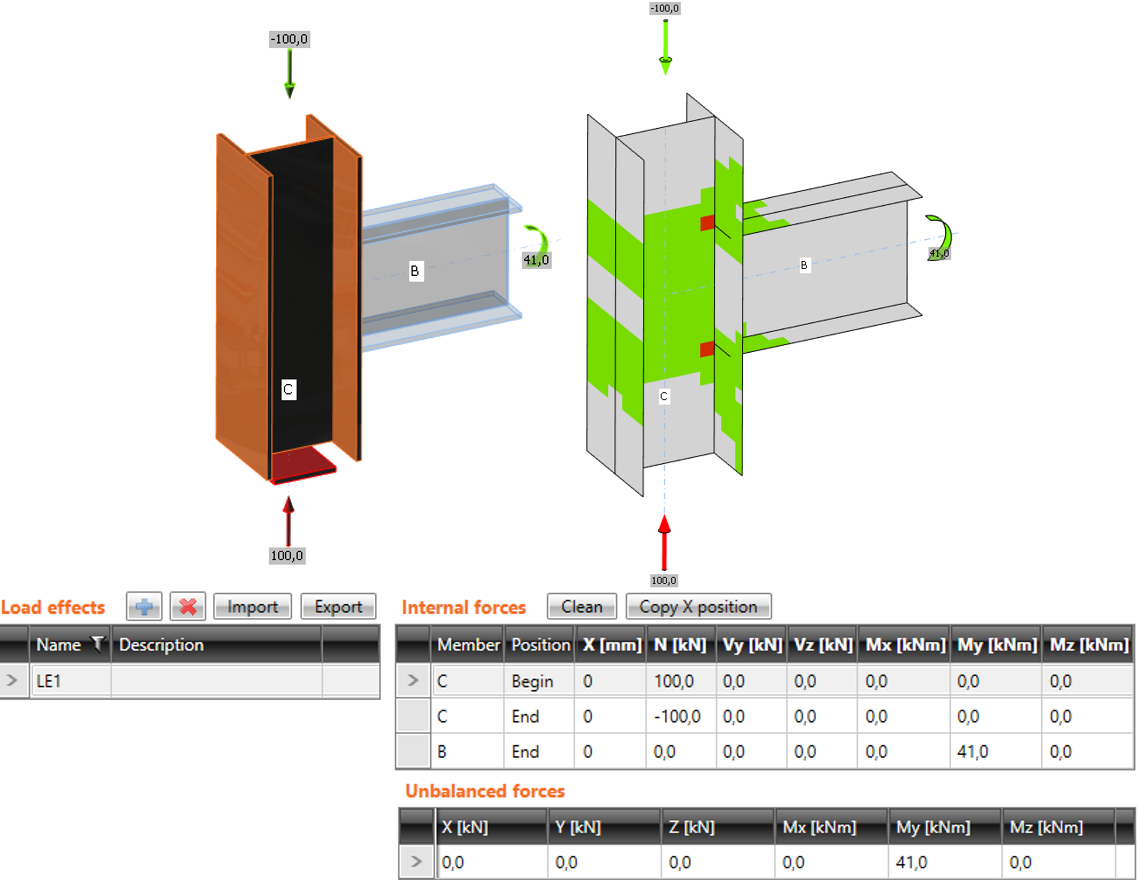
Inserimento avanzato: la forza normale nel pilastro viene presa in considerazione
Il metodo semplificato è più semplice per l'utente, ma può essere utilizzato solo quando l'utente è interessato a studiare gli elementi del collegamento e non il comportamento dell'intero giunto.
Nei casi in cui l'elemento portante è fortemente caricato e vicino alla sua capacità limite, è necessaria la modalità avanzata con il rispetto di tutte le forze interne nel giunto.
Forze interne nei collegamenti in acciaio
Le forze di estremità di un elemento del modello di analisi del telaio vengono trasferite alle estremità dei segmenti dell'elemento. Le eccentricità degli elementi causate dalla progettazione del giunto vengono rispettate durante il trasferimento.
Il modello di analisi creato con il metodo CBFEM corrisponde in modo molto preciso al giunto reale, mentre l'analisi delle forze interne viene eseguita su un modello a barre 3D agli elementi finiti fortemente idealizzato, in cui i singoli elementi sono modellati tramite linee d'asse e i giunti sono modellati con nodi immateriali.
Giunto tra una colonna verticale e una trave orizzontale
Le forze interne vengono analizzate utilizzando elementi 1D nel modello 3D. Nella figura seguente è riportato un esempio delle forze interne.
Forze interne nella trave orizzontale; M e V sono le forze di estremità al giunto
Gli effetti che un elemento esercita sul giunto sono importanti per la progettazione del giunto (collegamento). Gli effetti sono illustrati nella figura seguente:
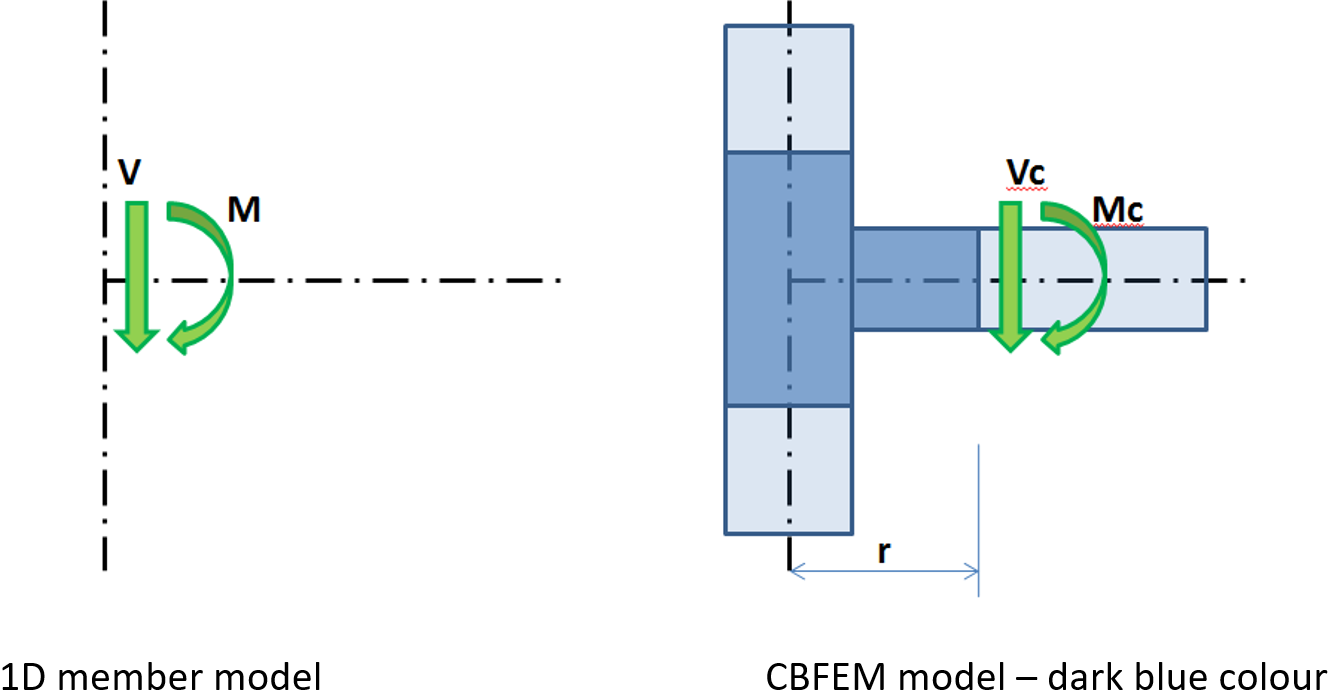
Effetti dell'elemento sul giunto; il modello CBFEM è rappresentato in blu scuro
Il momento M e la forza di taglio V agiscono nel giunto teorico. Il punto del giunto teorico non esiste nel modello CBFEM, pertanto il carico non può essere applicato in tale punto. Il modello deve essere caricato dalle azioni M e V, che devono essere trasferite all'estremità del segmento alla distanza r
Mc = M – V ∙ r
Vc = V
Nel modello CBFEM, la sezione di estremità del segmento è caricata dal momento Mc e dalla forza Vc.
Durante la progettazione del giunto, è necessario determinare e rispettare la sua posizione reale rispetto al punto teorico del giunto. Le forze interne nella posizione del giunto reale sono nella maggior parte dei casi diverse dalle forze interne nel punto teorico del giunto. Grazie al preciso modello CBFEM, la progettazione viene eseguita su forze ridotte – si veda il momento Mr nella figura seguente:
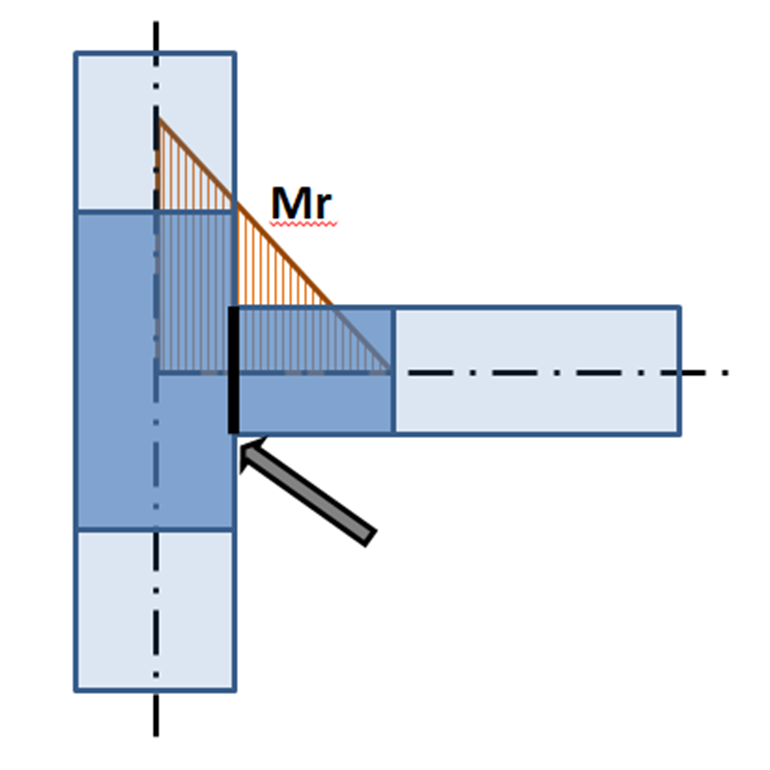
Momento flettente nel modello CBFEM: la freccia indica la posizione reale del collegamento
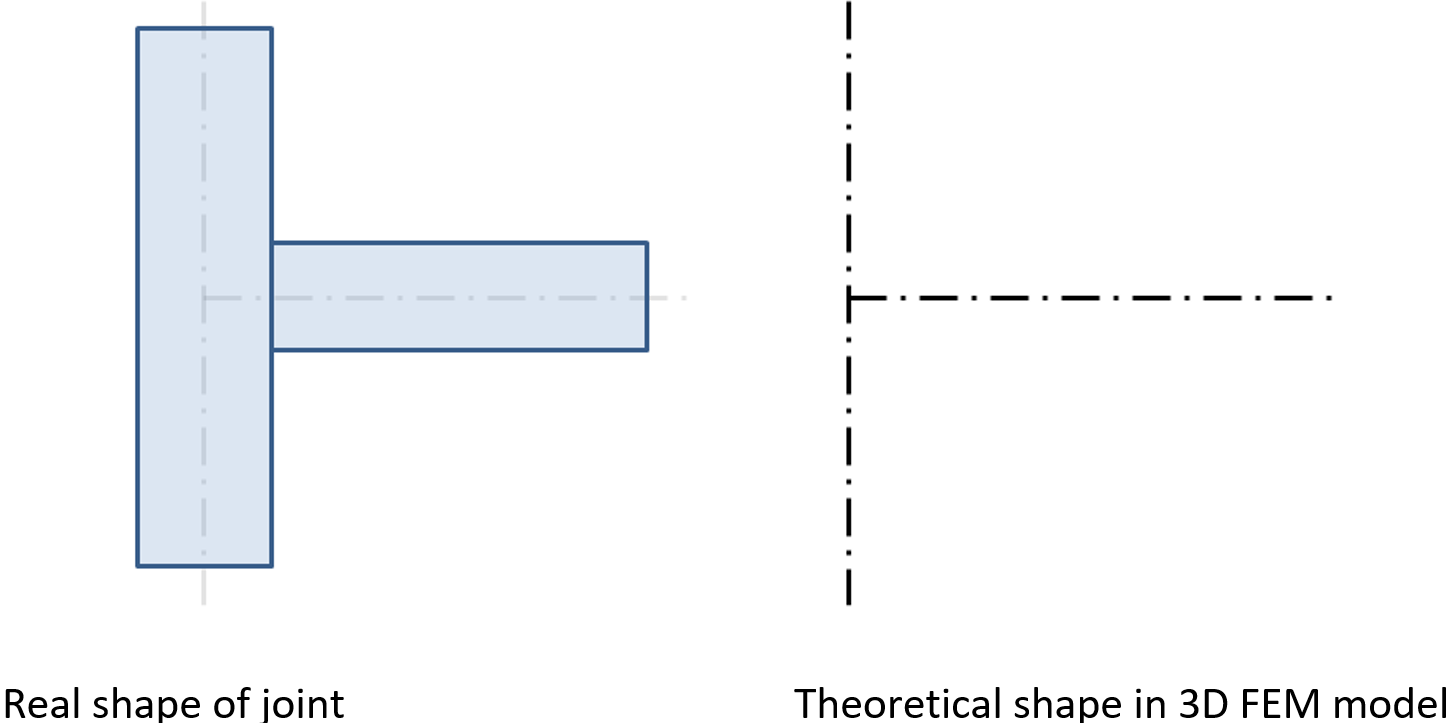
Nel caricare il giunto, è necessario rispettare che la soluzione del giunto reale deve corrispondere al modello teorico utilizzato per il calcolo delle forze interne. Ciò è soddisfatto per i giunti rigidi, ma la situazione può essere completamente diversa per le cerniere.
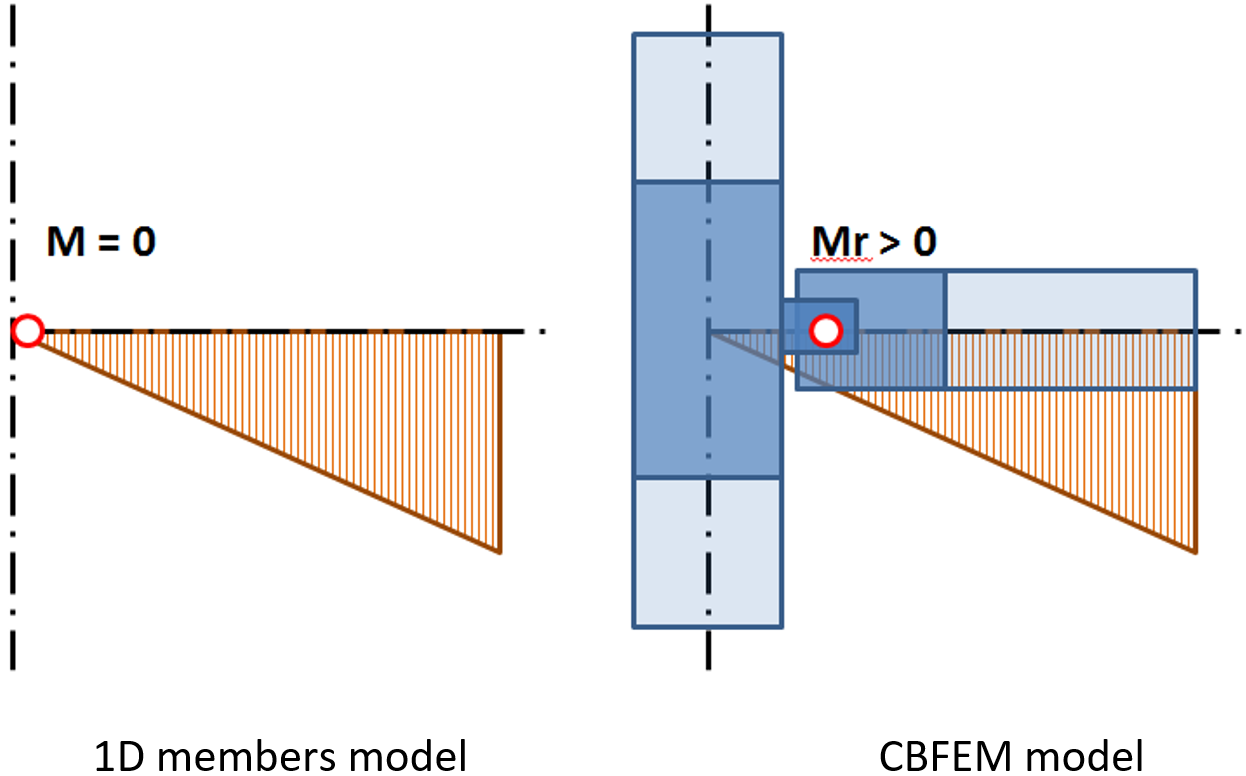
Posizione della cerniera nel modello teorico 3D agli elementi finiti e nella struttura reale
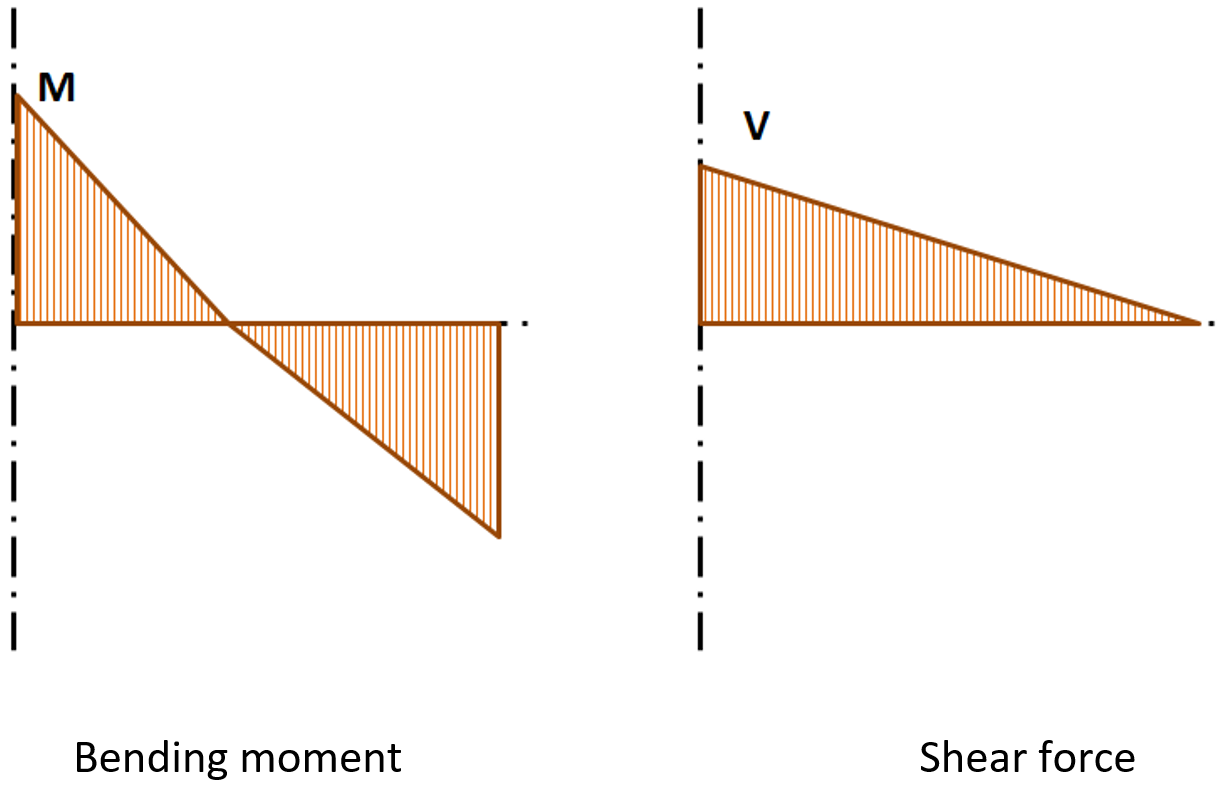
Come illustrato nella figura precedente, la posizione della cerniera nel modello teorico a elementi 1D differisce dalla posizione reale nella struttura. Il modello teorico non corrisponde alla realtà. Applicando le forze interne calcolate, un momento flettente significativo viene applicato al giunto traslato e il giunto progettato risulta sovradimensionato o non può essere progettato affatto. La soluzione è semplice: entrambi i modelli devono corrispondere. O la cerniera nel modello a elementi 1D deve essere definita nella posizione corretta, oppure la forza di taglio deve essere traslata in modo da ottenere un momento nullo nella posizione della cerniera.
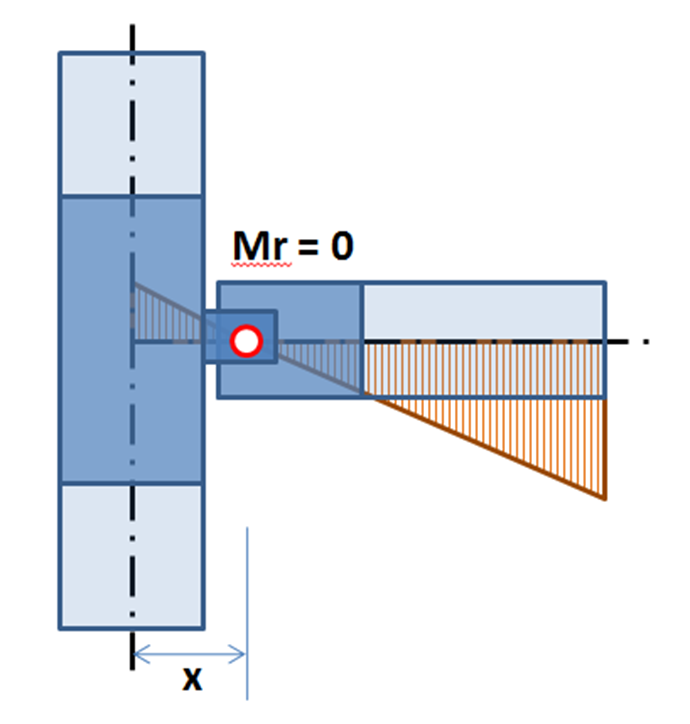
Distribuzione traslata del momento flettente sulla trave: il momento nullo si trova nella posizione della cerniera
La traslazione della forza di taglio può essere definita nella tabella per la definizione della forza interna.
La posizione dell'effetto del carico ha una grande influenza sulla corretta progettazione del collegamento. Per evitare qualsiasi malinteso, è possibile selezionare tra tre opzioni: Node / Bolts / Position.
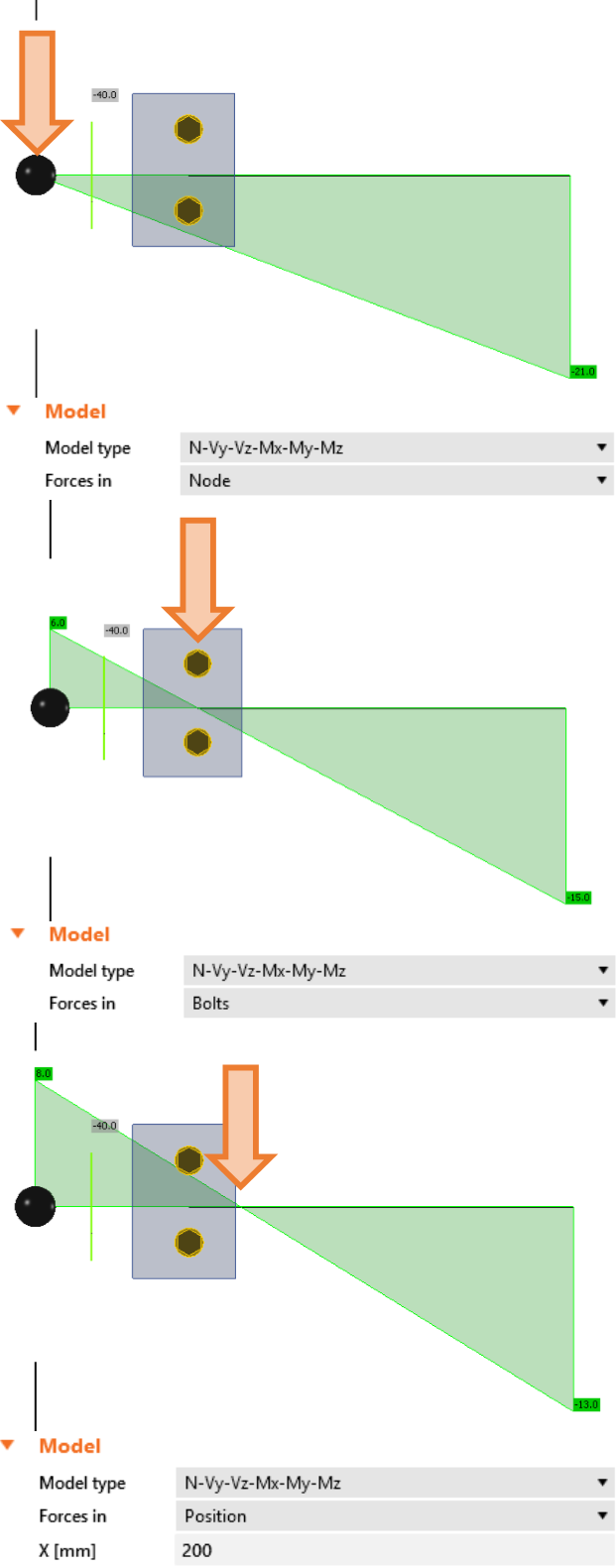
Si noti che selezionando l'opzione Node, le forze vengono applicate all'estremità dell'elemento selezionato, che di norma coincide con il nodo teorico, a meno che non sia impostato un offset dell'elemento selezionato nella geometria.
Importazione dei carichi da programmi FEA
IDEA StatiCa consente di importare le forze interne da programmi FEA di terze parti. I programmi FEA utilizzano un inviluppo delle forze interne derivante dalle combinazioni. IDEA StatiCa Connection è un programma che risolve il giunto in acciaio in modo non lineare (modello di materiale elastico/plastico). Pertanto, le combinazioni a inviluppo non possono essere utilizzate. IDEA StatiCa ricerca i valori estremi delle forze interne (N, Vy, Vz, Mx, My, Mz) in tutte le combinazioni alle estremità di tutti gli elementi collegati al giunto. Per ciascun valore estremo, vengono utilizzate anche tutte le altre forze interne di quella combinazione in tutti gli elementi rimanenti. IDEA StatiCa determina la combinazione più sfavorevole per ciascuna componente (piastra, saldatura, bullone, ecc.) nel collegamento.
L'utente può modificare questo elenco di casi di carico. Può lavorare con le combinazioni nella procedura guidata (o BIM), oppure può eliminare alcuni casi direttamente in IDEA StatiCa Connection.
Attenzione!
È necessario tenere conto delle forze interne non bilanciate durante l'importazione. Ciò può verificarsi nei seguenti casi:
- Una forza nodale è stata applicata nella posizione del nodo analizzato. Il software non è in grado di rilevare quale elemento debba trasferire tale forza nodale e, pertanto, essa non viene considerata nel modello di analisi. Soluzione: Non utilizzare forze nodali nell'analisi globale. Se necessario, la forza deve essere aggiunta manualmente a un elemento selezionato come forza normale o forza di taglio.
- Un elemento non in acciaio caricato (generalmente in legno o calcestruzzo) è collegato al nodo analizzato. Tale elemento non viene considerato nell'analisi e le sue forze interne vengono ignorate. Soluzione: Sostituire l'elemento in calcestruzzo con un blocco di calcestruzzo e un ancoraggio.
- Il nodo fa parte di una soletta o di una parete (generalmente in calcestruzzo). La soletta o la parete non è inclusa nel modello e le sue forze interne vengono ignorate. Soluzione: Sostituire la soletta o la parete in calcestruzzo con un blocco di calcestruzzo e un ancoraggio.
- Alcuni elementi sono collegati al nodo analizzato tramite vincoli rigidi. Tali elementi non sono inclusi nel modello e le loro forze interne vengono ignorate. Soluzione: Aggiungere manualmente questi elementi all'elenco degli elementi collegati.
- I casi di carico sismico vengono analizzati nel software. La maggior parte dei programmi FEA offre l'analisi modale per la risoluzione della sismicità. I risultati delle forze interne dei casi di carico sismico forniscono generalmente solo inviluppi delle forze interne nelle sezioni. A causa del metodo di valutazione (radice quadrata della somma dei quadrati – SRSS), le forze interne sono tutte positive e non è possibile individuare le forze corrispondenti all'estremo selezionato. Non è possibile raggiungere l'equilibrio delle forze interne. Soluzione: Modificare manualmente il segno positivo di alcune forze interne.
Analisi della resistenza dei giunti in acciaio
L'analisi della resistenza è l'analisi dei giunti più importante. Le verifiche di deformazione delle piastre e le verifiche normative dei componenti sono eseguite mediante analisi elastoplastica.
L'analisi dei giunti è non lineare per il materiale. Gli incrementi di carico vengono applicati gradualmente e si ricerca lo stato di sollecitazione. Esistono due modalità di analisi opzionali in IDEA StatiCa Connection:
- La risposta della struttura (giunto) al carico complessivo. In questa modalità, viene applicato tutto il carico definito (100%) e viene calcolato il corrispondente stato di tensione e deformazione.
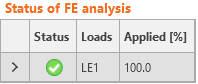
- L'analisi termina al raggiungimento dello stato limite ultimo. Deve essere selezionata l’opzione "Ferma alla deformazione limite" in Impostazione codice. Tale stato si presenta quando la deformazione plastica raggiunge il limite definito. Se il carico definito è superiore alla capacità calcolata, l'analisi viene contrassegnata come non soddisfacente e viene mostrata la percentuale di carico utilizzato. Si noti che la resistenza analitica dei componenti, ad esempio dei bulloni, può essere superata.
La seconda modalità è più adatta alla progettazione pratica. La prima è preferibile per un'analisi dettagliata di giunti complessi.
Analisi della rigidezza e della capacità di deformazione dei giunti in acciaio
I giunti sono classificati in base alla rigidezza: rigidi, semirigidi e a incernierati. L'ingegnere deve assicurarsi che la rigidezza del giunto confermi quella impostata nel software CAE.
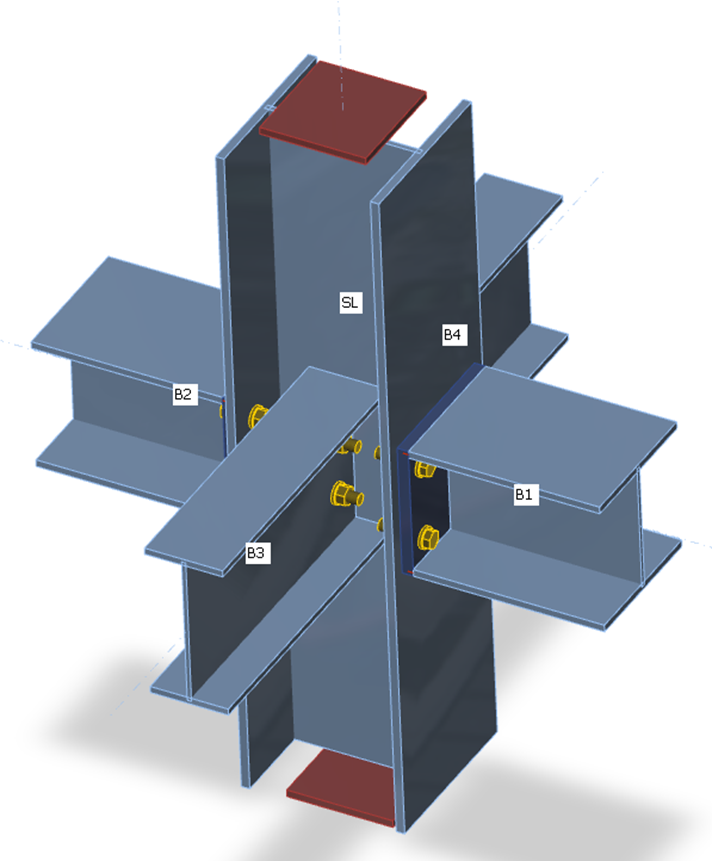
Il metodo CBFEM analizza la rigidezza di connessione dei singoli elementi del giunto. Per un'analisi corretta della rigidezza, è necessario creare un modello di analisi separato per ciascun elemento analizzato. In questo modo, l'analisi della rigidezza non è influenzata dalla rigidezza degli altri elementi del giunto, ma solo dal nodo stesso e dalla costruzione della connessione della membratura analizzata. Mentre la membratura portante presenta vincoli per l'analisi di resistenza (membratura SL nella figura seguente), tutte le membrature, eccetto quella analizzata, presentano vincoli per l'analisi di rigidezza (si vedano le due figure seguenti per l'analisi di rigidezza degli elementi B1 e B3). L'eccezione è rappresentata dalla base del pilastro, dove i vincoli sono forniti dalla fondazione in calcestruzzo, solo la membratura analizzata è soggetta a carico e le altre hanno vincoli solo in base al relativo tipo di modello.
Vincoli su membrature per l'analisi di resistenza
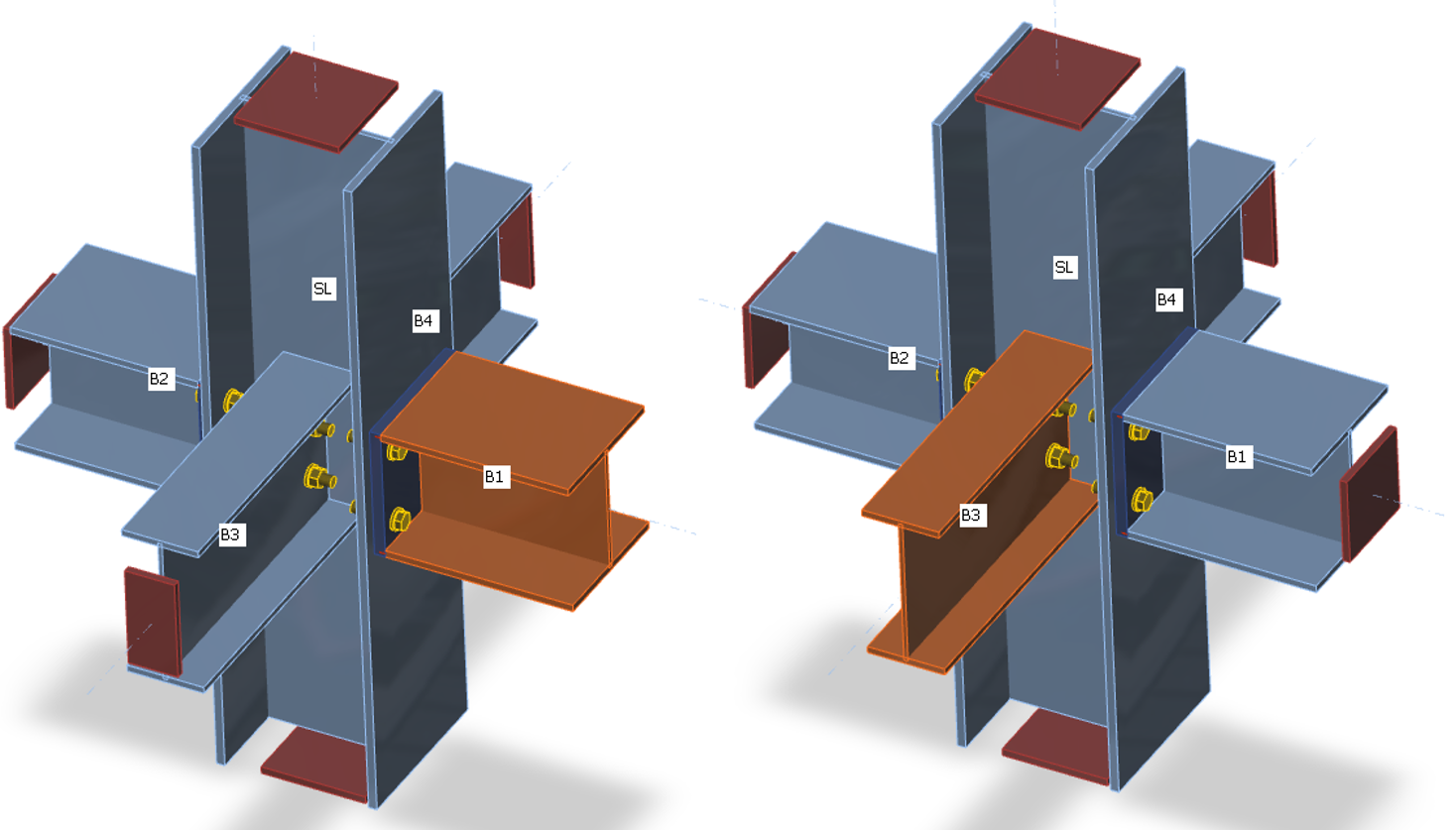
| Vincoli su membrature per l'analisi di resistenza della membratura B1 | Vincoli su membrature per l'analisi di resistenza della membratura B3 |
I carichi possono essere applicati solo alla membratura analizzata. Se viene definito il momento flettente My, si analizza la rigidezza rotazionale intorno all'asse y. Se viene definito il momento flettente Mz, si analizza la rigidezza rotazionale intorno all'asse z. Se viene definita la forza assiale N, si analizza la rigidezza assiale della connessione.
Il programma genera automaticamente un diagramma completo, che viene visualizzato direttamente nell'interfaccia grafica e può essere aggiunto come output nella relazione di calcolo. Per carichi di progetto specifici, può essere studiata la rigidezza rotazionale o assiale. IDEA StatiCa Connection può gestire anche l'interazione delle altre forze interne.
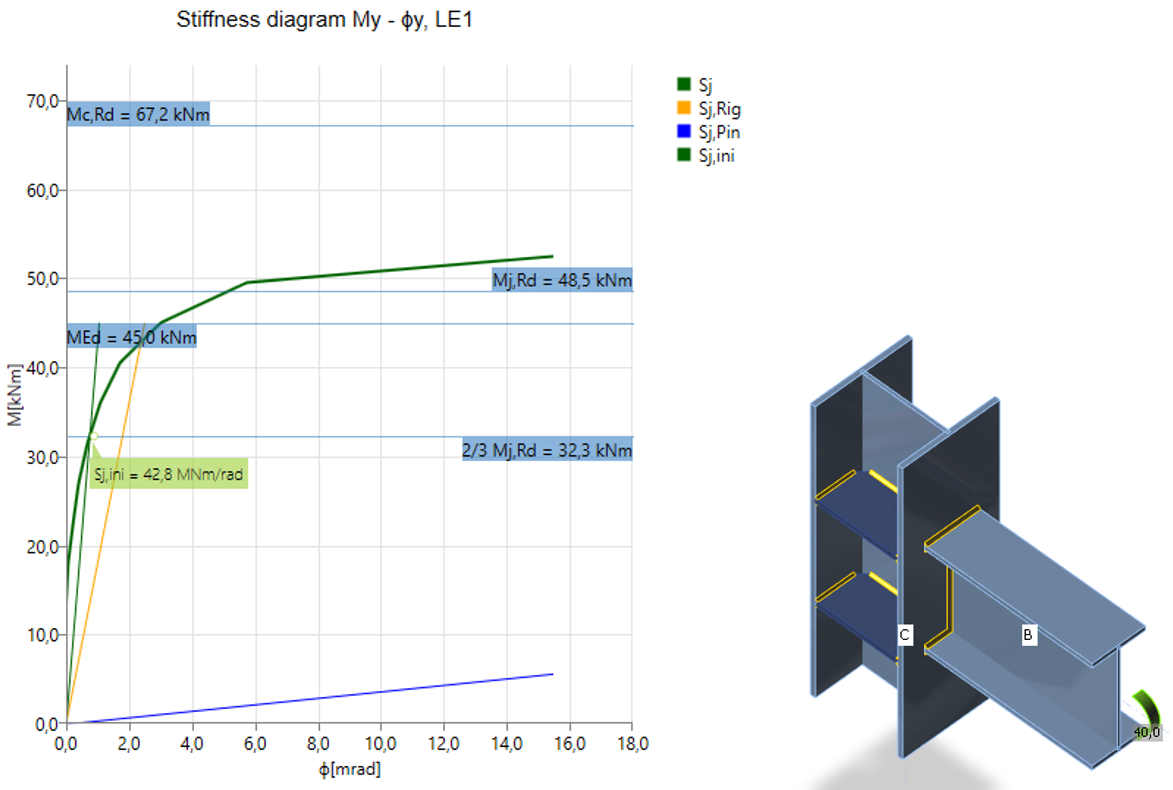
Il diagramma mostra:
- Livello di carico di progetto MEd
- Valore limite della capacità di connessione per una deformazione equivalente del 5% Mj,Rd; il limite per la deformazione plastica può essere modificato in Impostazione codice
- Il valore limite della capacità dell'elemento collegato (utile anche per la progettazione sismica) Mc,Rd
- 2/3 della capacità limite per il calcolo della rigidezza iniziale
- Valore della rigidezza iniziale Sj,ini
- Valore della rigidezza secante Sjs
- Limiti per la classificazione delle connessioni, rigide e a cerniera
- Deformazione rotazionale Φ
- Capacità rotazionale Φc
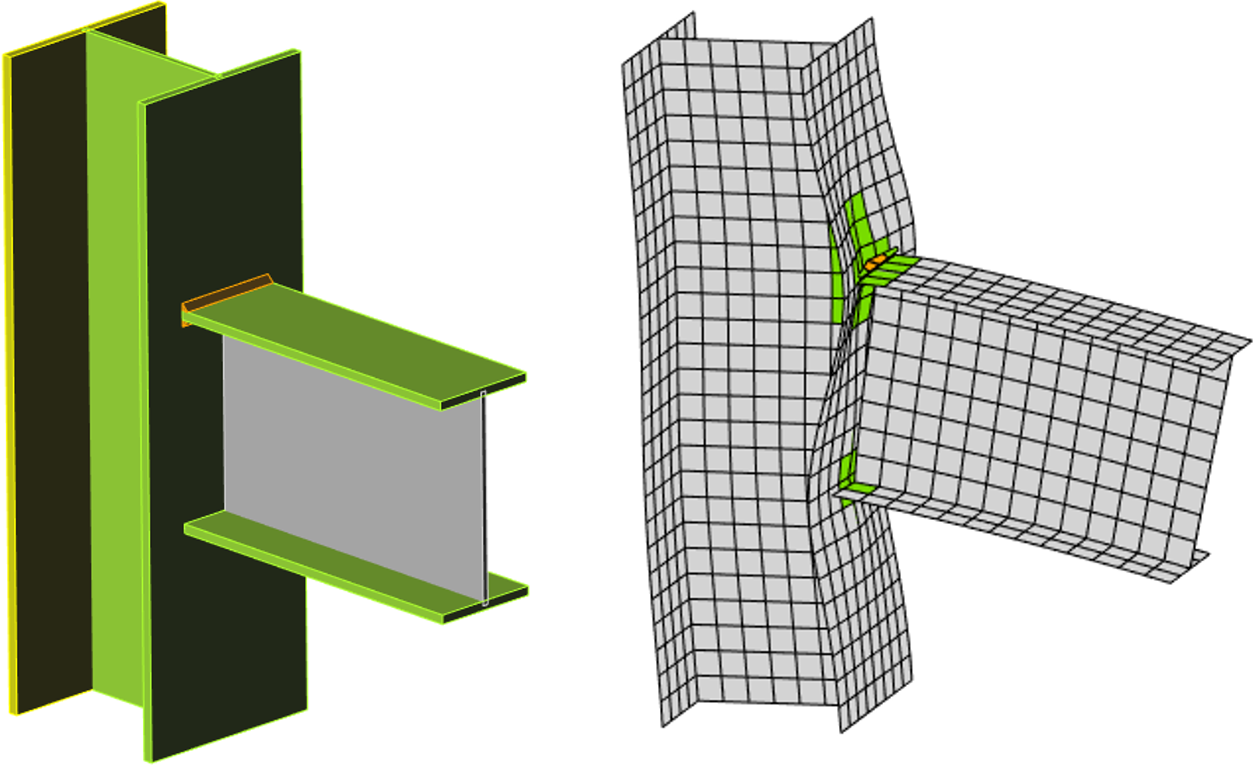
Connessione rigida saldata
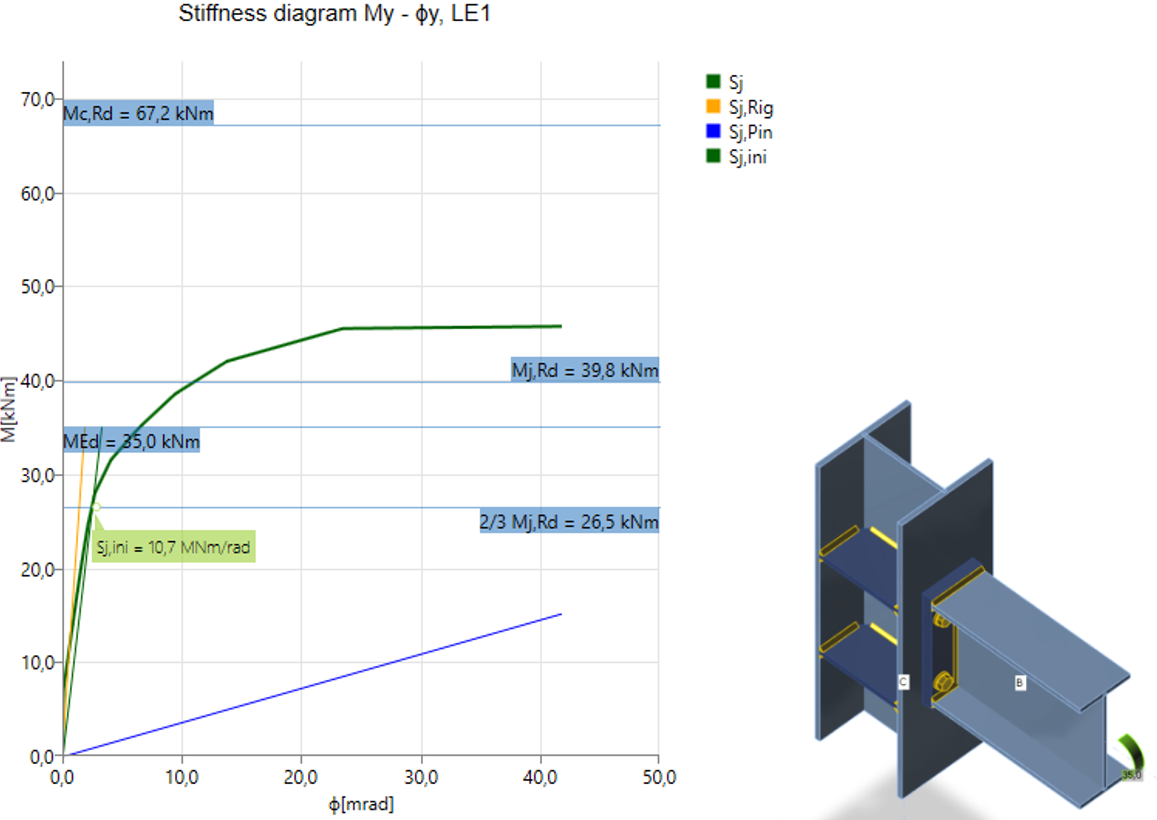
SConnessione semirigida bullonata
Dopo aver raggiunto il 5% di deformazione a taglio nel pannello d'anima del pilastro, le zone plastiche si propagano rapidamente
Il giunto viene classificato in base alla sua rigidezza in giunto rigido, semirigido o a cerniera, secondo il codice pertinente. Per la membratura analizzata può essere impostata la lunghezza teorica:
Come vengono applicati i carichi?
Nell'analisi di rigidezza viene sottoposta a carico e studiata una sola membratura. La membratura analizzata può essere sottoposta a:
- Sforzo normale N
- Sforzi di taglio Vy e Vz
- Momenti flettenti My e Mz
- Torsione Mx
Tutti gli effetti del carico sono applicati simultaneamente. Se i carichi applicati sono troppo piccoli, vengono tutti aumentati di un fattore in modo da raggiungere la resistenza del giunto. Quando si creano i diagrammi momento-rotazione o carico-deformazione, tutti gli effetti del carico vengono aumentati in modo proporzionale.
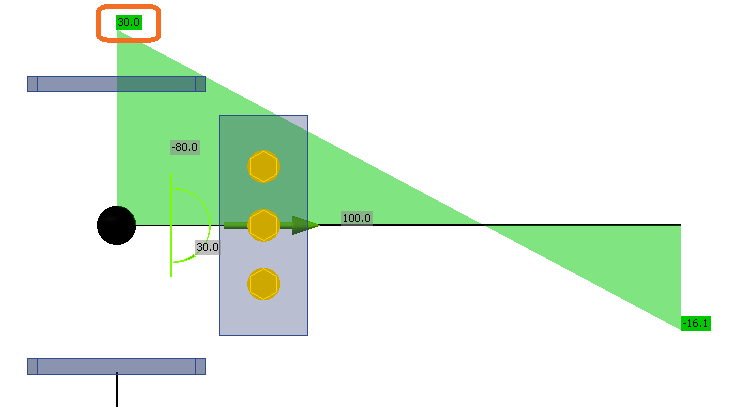
Ad esempio, la membratura analizzata è sottoposta a:
- Sforzo normale N = 50 kN
- Sforzo di taglio Vz = -80 kN
- Momento flettente My = 30 kNm
Le resistenze della membratura sono:
- Resistenza normale NR = 2 111 kN
- Resistenza al taglio Vz,R = 763 kN
- Resistenza al momento flettente My,R = 226 kNm
I carichi vengono moltiplicati per un fattore:
\[ \alpha = \textrm{min} \left \{ \frac{N_R}{N}, \, \frac{M_{y,R}}{M_y}, \, \frac{M_{z,R}}{M_z} \right \} \]
Si noti che, se lo sforzo di taglio non è applicato sul nodo, cioè agisce su un braccio di leva, il momento flettente è influenzato. Momento flettente sul nodo, visto in un modello fil di ferro, viene utilizzato come carico impostato.
In questo esempio, il fattore è \( \alpha = 7.53 \). I carichi impostati vengono moltiplicati e poi applicati per step, e si tiene traccia dei risultati nel diagramma di rigidezza. I carichi applicati sono suddivisi in 12 step e, quando la connessione si avvicina alla resistenza, gli step vengono ulteriormente affinati. L'esempio dei primi tre step è riportato nella tabella seguente:
| Carichi impostati | Carichi applicati | Primo step | Secondo step | Terzo step | |
| 100% | 8.33% | 16.67% | 25.00% | ||
| N | 50 | 377 | 31 | 63 | 94 |
| Vy | 0 | 0 | 0 | 0 | 0 |
| Vz | -80 | -603 | -50 | -100 | -151 |
| Mx | 0 | 0 | 0 | 0 | 0 |
| My | 30 | 226 | 19 | 38 | 57 |
| Mz | 0 | 0 | 0 | 0 | 0 |
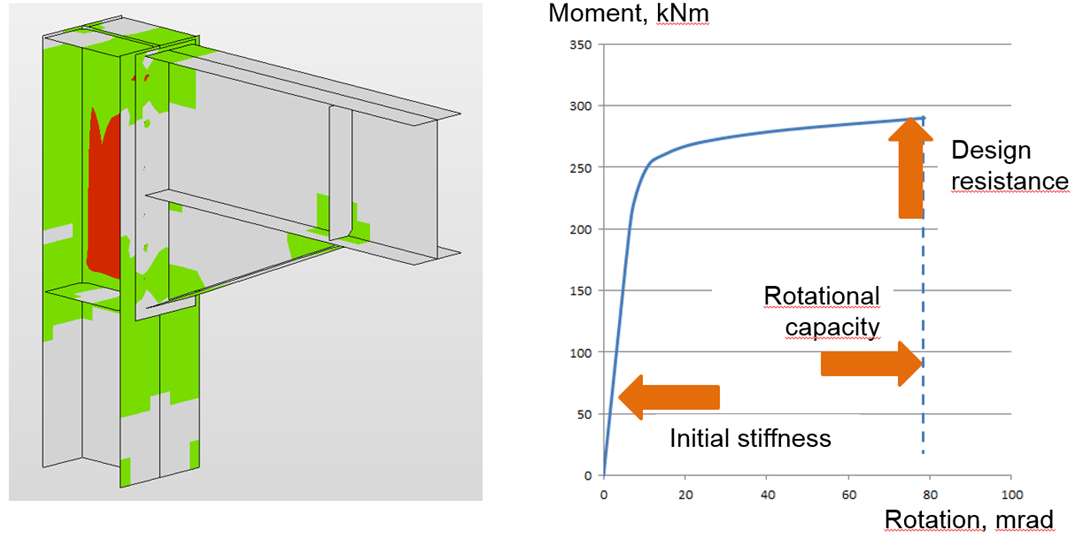
Capacità di deformazione
La capacità di deformazione/duttilità δCd costituisce, insieme alla resistenza e alla rigidezza, uno dei tre parametri fondamentali che descrivono il comportamento delle connessioni. Nelle connessioni resistenti al momento, la duttilità si ottiene grazie a una sufficiente capacità di rotazione φCd. La capacità di deformazione/rotazione viene calcolata separatamente per ogni connessione del giunto.
Il software stima la capacità di deformazione come un punto in cui si verifica una delle seguenti condizioni:
- Si raggiunge la resistenza del bullone o dell'ancoraggio in trazione, a taglio o nell'interazione tensione/taglio
- Si raggiunge la resistenza di saldatura
- La deformazione plastica delle piastre è del 15 %
La stima della capacità di rotazione è importante nelle connessioni esposte a rischio sismico, si vedano Gioncu e Mazzolani (2002) e Grecea (2004), e a carichi estremi, si veda Sherbourne e Bahaari (1994 e 1996). La capacità di deformazione dei componenti è stata studiata a partire dalla fine del secolo scorso (Foley e Vinnakota, 1995). Faella et al. (2000) hanno effettuato delle prove su elementi a T e hanno ricavato le espressioni analitiche per la capacità di deformazione. Kuhlmann e Kuhnemund (2000) hanno eseguito prove sull'anima di un pilastro sottoposto a compressione trasversale a diversi livelli di forza assiale di compressione nel pilastro. Da Silva et al. (2002) hanno previsto la capacità di deformazione a diversi livelli di forza assiale nella trave collegata. Sulla base dei risultati dei test combinati con l'analisi FE, sono state stabilite le capacità di deformazione dei componenti di base nei modelli analitici di Beg et al. (2004). In questo lavoro, i componenti sono rappresentati da spirali non lineari e opportunamente combinati per determinare la capacità di rotazione del giunto per le connessioni delle piastra di estremità, con piastra di estremità estesa o a filo e connessioni saldate. Per queste connessioni, i componenti più importanti che possono contribuire in modo significativo alla capacità di rotazione sono stati riconosciuti come l'anima in compressione, l'anima del pilastro in trazione, l'anima del pilastro in taglio, la flangia del pilastro in flessione e la piastra di estremità in flessione. I componenti relativi all'anima del pilastro sono rilevanti solo quando non ci sono irrigidimenti nel pilastro che resistono alle forze di compressione, trazione o taglio. La presenza di un irrigidimento elimina il componente corrispondente e il suo contributo alla capacità di rotazione del giunto può quindi essere trascurato. Le piastre di estremità e le flange del pilastro sono importanti solo per le connessioni delle piastre di estremità in cui i componenti agiscono come elementi a T, dove è inclusa anche la capacità di deformazione dei bulloni in tensione. Le questioni e i limiti della capacità di deformazione delle connessioni in acciaio ad alta resistenza sono stati studiati da Girao et al. (2004).
Verifica della capacità del collegamento in acciaio
La progettazione in capacità è parte della verifica di un giunto nella progettazione sismica. Quando si fa affidamento sulla duttilità di una struttura, è necessario eseguire la progettazione in capacità.
L'obiettivo della progettazione in capacità è confermare che un edificio subisca un comportamento duttile controllato per evitare il collasso in un terremoto di progetto.
Un elemento dissipativo viene selezionato con resistenza aumentata e un diagramma del materiale modificato. Un fattore di sovraresistenza \(\gamma_{ov}\) è definito nei Materiali, e un fattore di incrudimento \(\gamma_{sh}\) nell'operazione dell'elemento dissipativo. Si noti che la nomenclatura differisce tra le normative. Un elemento dissipativo è escluso dalla verifica della deformazione delle piastre.
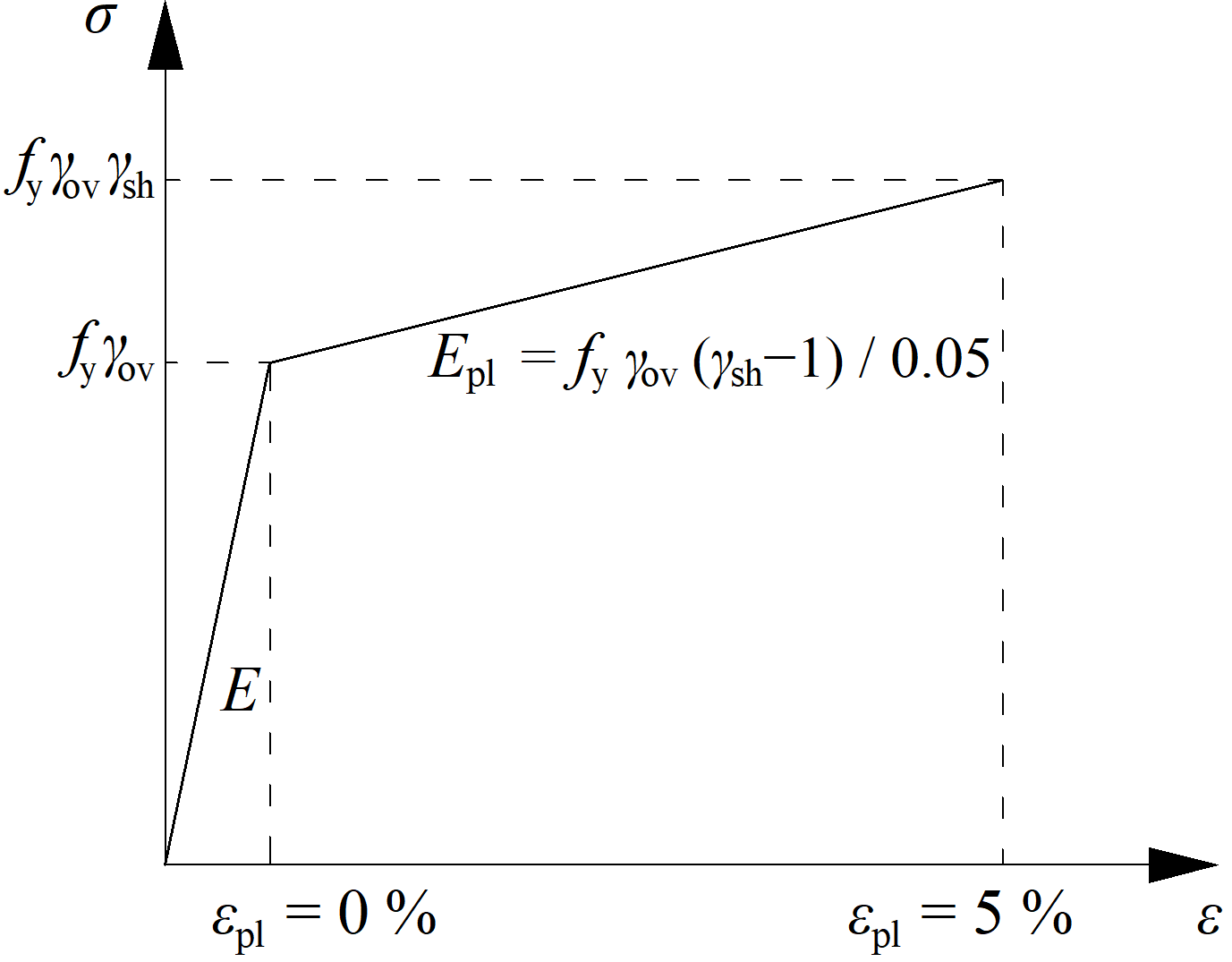
Diagramma del materiale modificato per l'elemento dissipativo
IDEA StatiCa Connection verifica il collegamento sul carico di progetto applicato, che dovrebbe creare una cerniera plastica nell'elemento dissipativo selezionato, solitamente la trave. La deformazione plastica nell'elemento dissipativo dovrebbe essere intorno al 5%. Questo può servire come conferma che l'entità e la posizione dei carichi sono stati determinati correttamente.
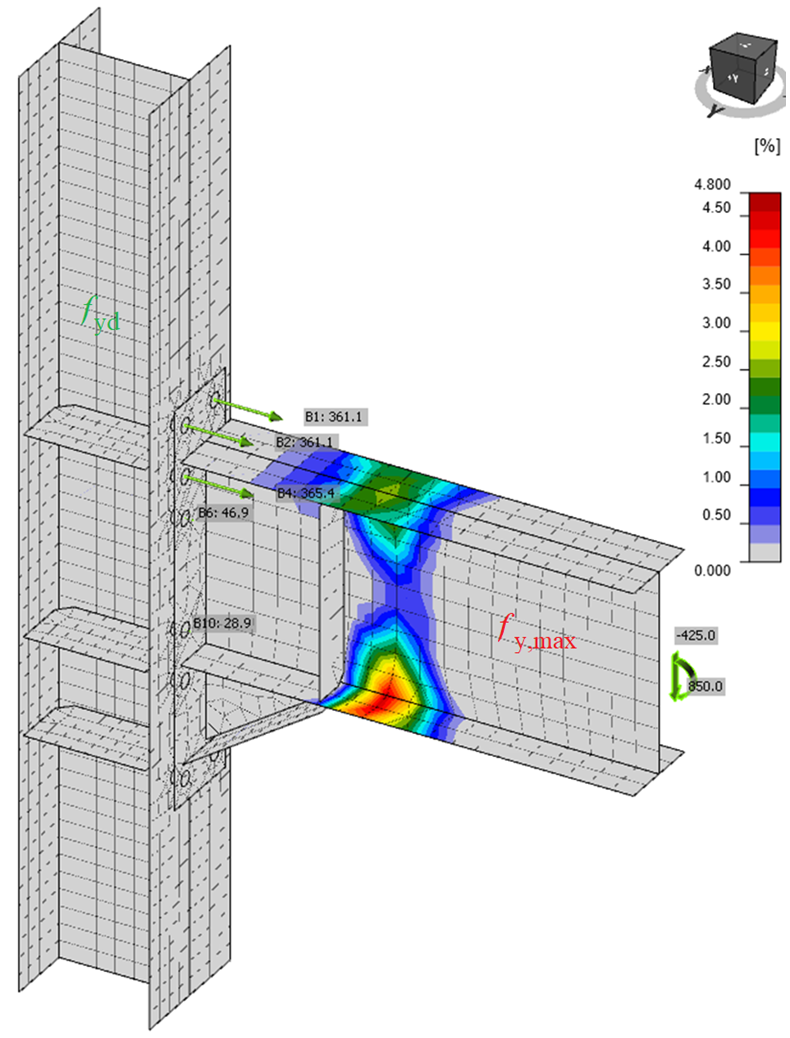
Cerniera plastica creata nel punto previsto dell'elemento dissipativo – la trave
I vincoli dell'elemento continuo sono automaticamente definiti come supportati a un'estremità e con momenti vincolati all'altra estremità. In questo modo, la colonna continua può essere caricata dalla forza normale e dalle forze di taglio, e anche un lato può spostarsi lateralmente in modo che la rottura dell'anima della colonna a taglio venga rilevata.
Si noti che i dettagli costruttivi sono molto importanti per i giunti resistenti alle azioni sismiche, ma non vengono verificati in IDEA StatiCa.
Resistenza di progetto del giunto
Il progettista di solito risolve il compito di progettare il collegamento/giunto per trasferire il carico di progetto noto. Ma è anche utile sapere quanto il progetto si trova lontano dallo stato limite, ovvero quanto grande è la riserva nel progetto e quanto è sicuro. Questo può essere fatto semplicemente tramite il tipo di analisi – Resistenza di progetto del giunto.
L'utente inserisce il carico di progetto come in un progetto standard. Il software aumenta automaticamente e proporzionalmente tutte le componenti del carico fino a quando una delle verifiche incluse non risulta soddisfatta.
Le analisi DR eseguono verifiche per i seguenti componenti:
- Deformazione plastica nelle piastre
- Bulloni – taglio, trazione e combinazione di trazione e taglio
- Ancoraggi – resistenza dell'acciaio a trazione e taglio
- Saldature
Si noti che gli altri componenti non inclusi nell'elenco precedente non verranno verificati a causa delle direzioni sconosciute delle forze nei componenti. Per questo motivo, un'analisi EPS dovrebbe sempre essere condotta per garantire che tutte le verifiche siano eseguite correttamente.
L'utente ottiene il rapporto tra il carico massimo e il carico di progetto. Viene inoltre fornito un semplice diagramma.
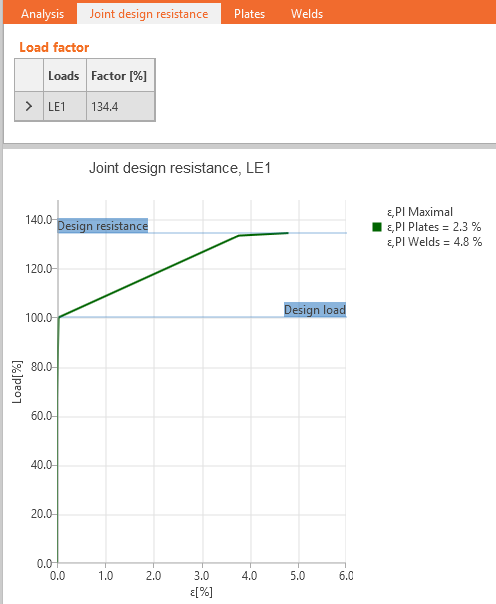
I risultati delle combinazioni di carico definite dall'utente vengono mostrati a meno che il Fattore di resistenza di progetto del giunto sia inferiore al 100%, il che significa che il calcolo non ha raggiunto la convergenza e viene mostrato l'ultimo step convergente della combinazione di carico.
Analisi di instabilità dei giunti in acciaio
Solitamente, nei giunti, l'instabilità non è un problema rilevante. Tuttavia, è necessario verificare che non vi siano problemi di instabilità e che i risultati dell'analisi di resistenza, che si avvale solo dell'analisi lineare per geometria, siano corretti.
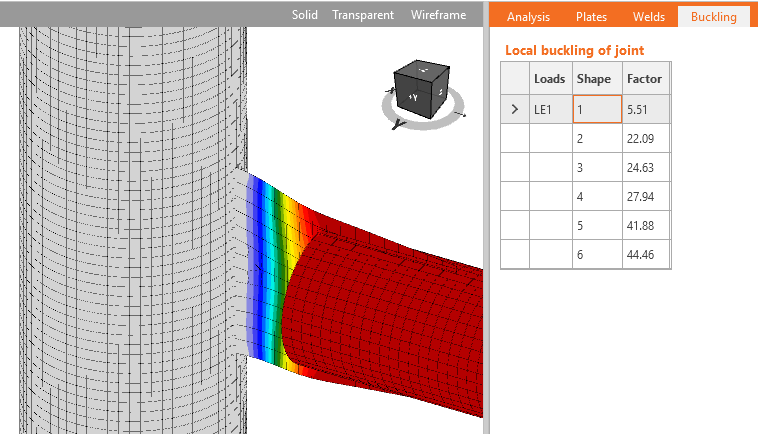
IDEA StatiCa Connection può eseguire l'analisi di instabilità lineare di un modello di giunto. I risultati sono predetti dalle modalità di instabilità. Per ogni modalità di instabilità viene calcolato il carico critico, al quale si verifica l'instabilità del modello perfetto. Il carico critico è presentato da moltiplicatori del carico che agiscono sul giunto. In base alla modalità di instabilità e al moltiplicatore del carico critico, l'utente è in grado determinare la progettazione di instabilità sicura.
Alcuni codici, ad esempio l'Eurocodice (EN 1993-1-1, capitolo 5.2.1), raccomandano un moltiplicatore di carico critico superiore a 15 per i modelli di strutture a barre. Se il moltiplicatore del carico critico è superiore a 15, il codice non richiede una verifica di instabilità delle membrature.
Per i giunti, la questione è diversa e il codice non fornisce alcuna raccomandazione specifica. La progettazione dell'instabilità locale deve essere affrontata in un altro modo. In generale, l'instabilità locale può essere suddivisa in tre gruppi:
- Piastre che collegano le singole membrature
- Piastre di irrigidimento nel giunto: irrigidimenti, nervature, fazzoletti d’angolo corti
- Sezioni chiuse e sezioni a parete sottile
L'instabilità delle piastre del gruppo 1 influisce sulla forma di instabilità dell'intera struttura. Pertanto, si raccomanda di applicare anche a queste piastre le stesse regole applicate a queste membrature, ossia di considerare un moltiplicatore di carico critico sicuro pari a 15 o superiore. L'ingegnere deve verificare che l'esecuzione reale del giunto corrisponda alle condizioni limite del modello utilizzato per l'analisi di instabilità dell'intera struttura.
Le piastre del gruppo 2 influiscono sull'instabilità locale del giunto. Per tali piastre, il limite di sicurezza del moltiplicatore di carico critico 15 è conservativo, ma mancano indicazioni specifiche nei codici. La guida è fornita da pubblicazioni di ricerca che raccomandano un limite di sicurezza di moltiplicatore di carico critico pari a 3.
L'instabilità di piastre e membrature del gruppo 3 è molto problematica ed è necessaria una valutazione singola di ogni caso particolare.
Per le piastre con un moltiplicatore di carico critico inferiore ai valori suggeriti (15 per il gruppo 1, 3 per il gruppo 2), non è possibile utilizzare la progettazione plastica. Per il loro controllo, sono necessari altri metodi non offerti da IDEA StatiCa.
Il risultato dell'analisi di instabilità in IDEA StatiCa Connection non è una verifica definitiva. I codici non forniscono indicazioni sufficienti. La valutazione richiede un giudizio ingegneristico e IDEA StatiCa fornisce strumenti unici non disponibili nei software di progettazione standard.
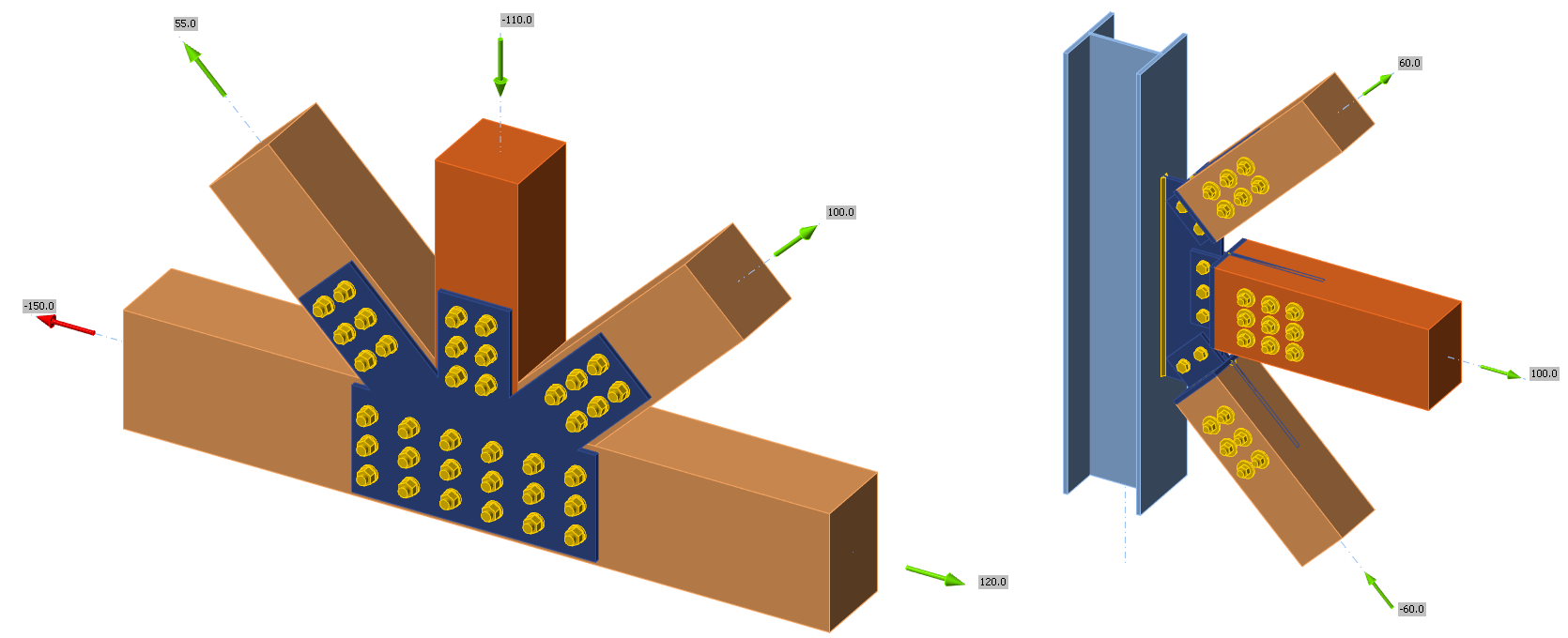
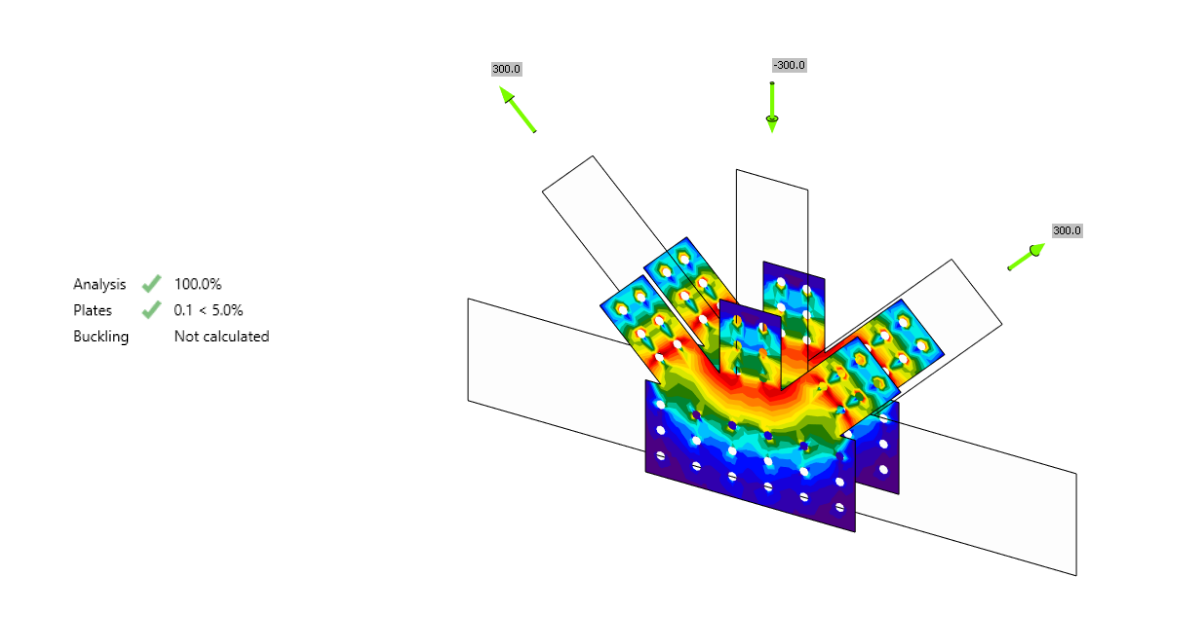
Piastra a fazzoletto come allungamento di una travatura reticolare: esempio di piastra del gruppo 1 per la quale l'instabilità può essere trascurata se il fattore di instabilità critico è superiore a 15
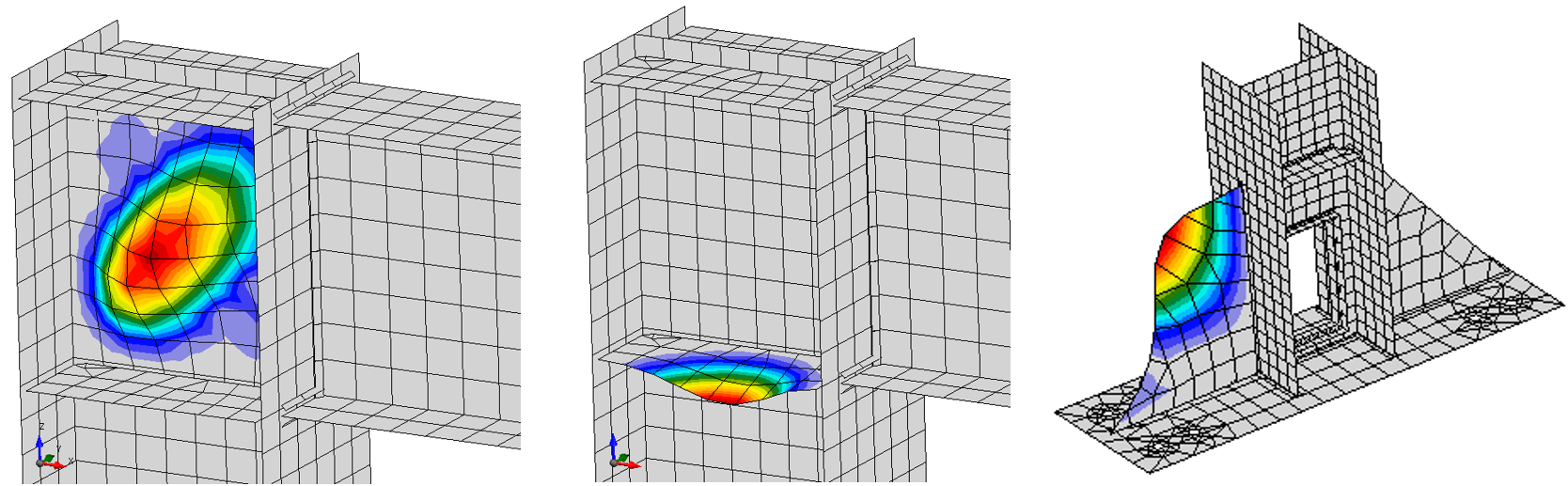
Esempi di forme di instabilità di piastre del gruppo 2 in cui l'instabilità può essere trascurata se il fattore di instabilità critico è superiore a 3
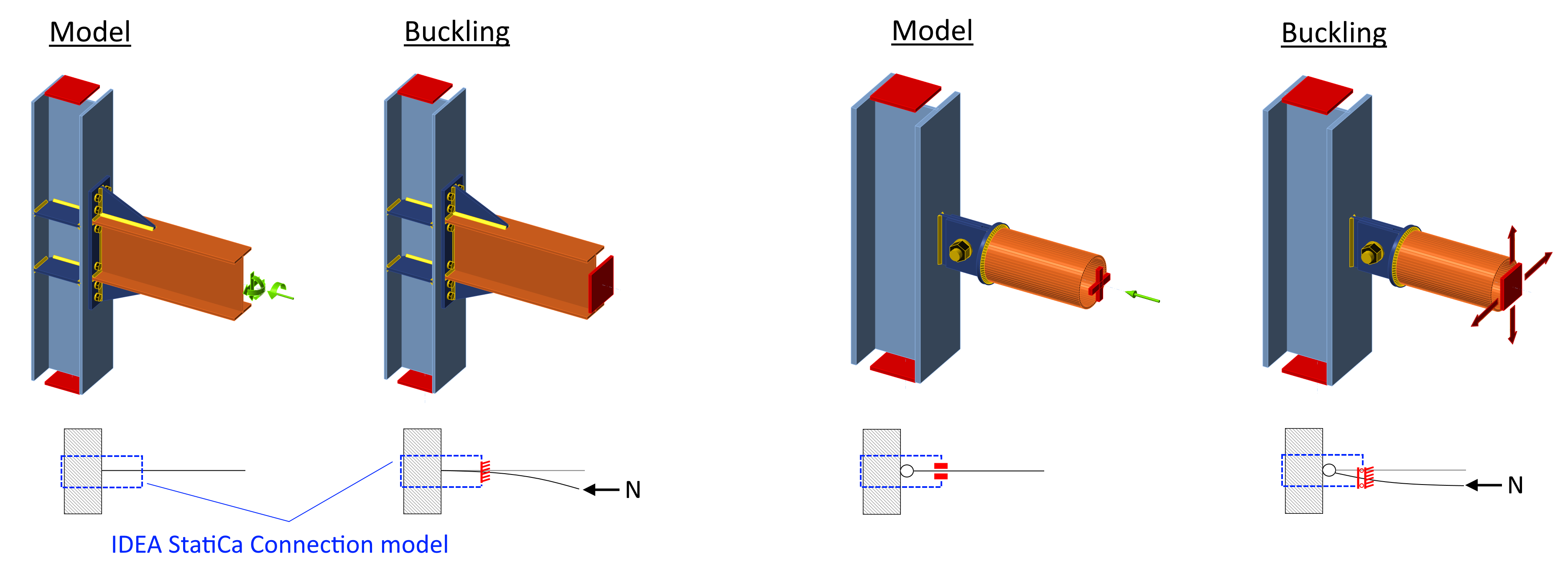
Il modello utilizzato per l'analisi di instabilità è sostenuto da supporti diversi rispetto a quelli impostati dall'utente nell’analisi delle sforzo e deformazione (EPS). L'elemento resistente è completamente vincolato. Il tipo di modello di una trave impostato come N-Vy-Vz-Mx-My-Mz (libero di muoversi nell’analisi delle sollecitazioni e delle deformazioni) è completamente vincolato nell'analisi di instabilità. Tutte le altre analisi della trave hanno momenti flettenti e forza normale limitati, ma sono liberi di muoversi lateralmente.
- Modello N-Vy-Vz-Mx-My-Mz: supporti nel modello di instabilità: N-Vy-Vz-Mx-My-Mz
- Modello N-Vy-Vz: supporti nel modello di instabilità: N-Mx-My-Mz
- Modello N-Vz-My: supporti nel modello di instabilità: N-Mx-My-Mz
- Modello N-Vy-Mz: supporti nel modello di instabilità: N-Mx-My-Mz
Si assume che, in caso di giunto rigido, l'utente imposti il momento flettente e che l'instabilità del segmento corto della trave non sia rilevante. Diversamente, nel caso di un giunto a cerniera, l'utente imposta solo la forza normale e di taglio e non il momento flettente, ma l'instabilità dell'elemento a cerniera è rilevante e contribuisce al fattore di instabilità. Si veda la figura seguente. "Model" mostra il modello nell’analisi sforzo-deformazione, mentre "Buckling" mostra il modello nell'analisi di instabilità.
Convergenza dell'analisi di modelli complessi di collegamento in acciaio
L'analisi agli elementi finiti potrebbe non convergere per diversi motivi, solitamente a causa di un elemento non sufficientemente vincolato che può muoversi o ruotare liberamente.
L'analisi agli elementi finiti richiede un diagramma tensione-deformazione leggermente crescente dei modelli di materiale. In alcuni casi di modelli complessi, ad esempio con contatti multipli, l'aumento delle iterazioni divergenti può favorire la convergenza. Questo valore può essere impostato nella configurazione del codice. Le cause più comuni di errore nell'analisi sono le singolarità, quando le parti di un modello non sono collegate correttamente e sono libere di muoversi o ruotare. L'utente viene avvisato e deve verificare il modello per individuare saldature o bulloni mancanti. La forma deformata viene mostrata con gli elementi che hanno causato la prima singolarità spostati di 1 m, in modo che la singolarità possa essere facilmente individuata.
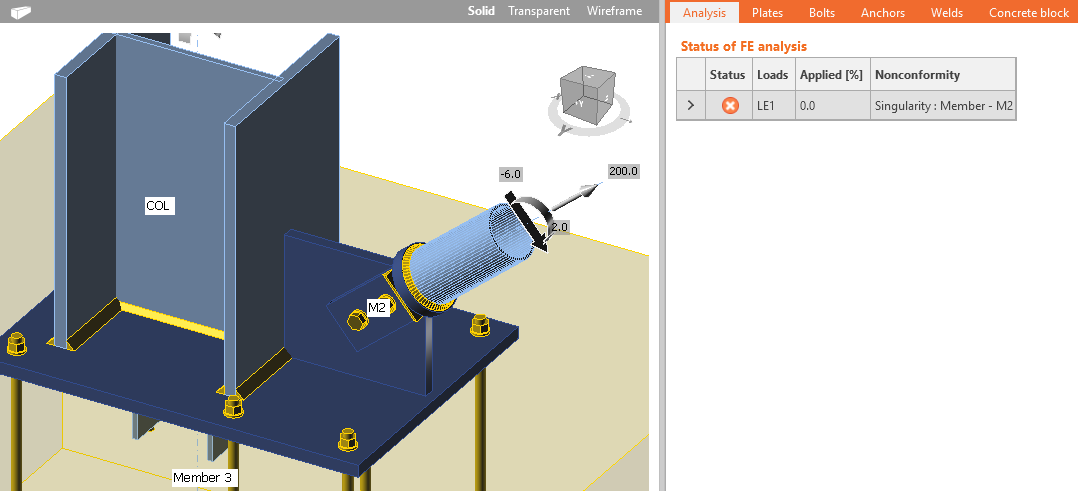
Saldature mancanti alle piastre di nodo che causano singolarità
Giunti acciaio-legno (Fondamenti teorici)
I giunti acciaio-legno sono attualmente disponibili solo per la verifica delle piastre in acciaio e la determinazione dei vettori di forza negli elementi di fissaggio. Le piastre di nodo possono essere applicate come chiuse o inserite.
Le proprietà dei materiali del legno non sono specificate. Le verifiche degli elementi di fissaggio e del legno devono essere eseguite manualmente o con un altro software secondo le appropriate regole di progettazione. Pertanto, l'analisi della rigidezza non è disponibile.
La verifica di qualsiasi altro componente dei collegamenti in acciaio viene eseguita come di consueto tramite verifica normativa.
Per saperne di più su come lavorare con i giunti acciaio-legno, consultare l'articolo della Knowledge base.
Elementi in acciaio a parete sottile
IDEA StatiCa Connection per la progettazione di giunti di elementi a parete sottile dovrebbe essere utilizzato solo da ingegneri esperti. L'analisi di instabilità è indispensabile e ogni forma modale deve essere analizzata con attenzione.
Il software IDEA StatiCa Connection è dedicato alla valutazione dei collegamenti di elementi laminati a caldo che non sono significativamente influenzati dall'instabilità. L'analisi geometricamente lineare e materialmente non lineare viene eseguita per la sua rapidità e stabilità di calcolo. Tuttavia, questa analisi non è sufficiente per la perdita di stabilità. Se l'instabilità può rappresentare un problema, l'esecuzione di un'analisi lineare di instabilità aiuta a individuare le zone critiche e fornisce un fattore per il punto di biforcazione di Eulero, ma ciò non è ancora sufficiente per gli elementi a parete sottile. Per gli elementi a parete sottile, è adatta solo l'analisi geometricamente non lineare con imperfezioni.
Se l'utente decide comunque di utilizzare il software IDEA StatiCa Connection per verificare i collegamenti di elementi a parete sottile, dovrebbe:
- Eseguire l'analisi lineare di instabilità e valutare attentamente ogni forma di instabilità; le prime 5 forme di instabilità presentate potrebbero non essere sufficienti (Come aumentare il numero di forme valutate)
- Non fare affidamento sulla plasticità delle piastre in acciaio e limitare piuttosto la tensione di von Mises alla tensione di snervamento o anche a valori inferiori
- Tenere presente che l'instabilità locale, che non viene considerata, può ridistribuire diversamente le forze interne nei componenti
- Tenere presente che la rigidezza dei componenti può essere diversa a causa di diversi modi di rottura o della loro combinazione.
- Tenere presente che le verifiche e i dettagli costruttivi dei componenti presentati (ad es. bulloni, saldature) seguono le linee guida per elementi standard. Le verifiche per gli elementi a parete sottile possono variare e, in tal caso, le verifiche fornite non sono corrette.
La progettazione dei collegamenti di elementi a parete sottile è molto specifica per ogni caso e non è possibile fornire linee guida generali. IDEA StatiCa Connection non è stato validato per questo utilizzo.
Verifiche dei componenti – EN
Nella EN 1993-1-1 gli elementi a parete sottile sono definiti come: "Le sezioni trasversali di Classe 4 sono quelle in cui si verificherà l'instabilità locale prima del raggiungimento della tensione di snervamento in una o più parti della sezione trasversale." La parte principale dell'Eurocodice per l'acciaio è limitata agli elementi con spessore del materiale t ≥ 3 mm. Il Capitolo 4 – Collegamenti saldati si applica solo a spessori di materiale t ≥ 4 mm. Pertanto, le verifiche dei componenti fornite dal software non si applicano agli elementi formati a freddo con spessori inferiori. Gli utenti devono essere consapevoli di ciò e sostituire manualmente le verifiche con le formule appropriate della EN 1993-1-3.
L'analisi dei giunti di sezioni cave deve essere eseguita con attenzione anche per gli elementi che esulano dal campo di validità per i giunti saldati – EN 1993-1-8 – Tabella 7.1. Non esistono linee guida per tali giunti e i risultati del software non sono stati validati.
Verifiche dei componenti – AISC
Nel Capitolo A di AISC 360-16 è presente una nota utente che afferma: "Per la progettazione di elementi strutturali in acciaio formati a freddo, si raccomandano le disposizioni della AISI North American Specification for the Design of Cold-Formed Steel Structural Members (AISI S100), ad eccezione delle sezioni cave strutturali (HSS) formate a freddo, che vengono progettate in conformità con questa Specifica." AISI S100 e AS/NZS 4600 forniscono formule per determinare la resistenza a taglio e a trazione dei tipi di elementi di fissaggio più comuni insieme al loro campo di applicazione
Verifiche dei componenti – CISC
La CSA S16-14 afferma nel Capitolo 1: "I requisiti per le strutture in acciaio come ponti, torri per antenne, strutture offshore ed elementi strutturali in acciaio formati a freddo sono riportati in altri Standard del Gruppo CSA."
Vincolo all'instabilità flesso-torsionale nella progettazione strutturale
Descrizione del modello
Il vincolo all'instabilità flesso-torsionale è simulato da due rigidezze aggiunte a qualsiasi piastra:
- Laterale (taglio) S [N] applicata nella direzione dell'asse y del sistema di coordinate locale della piastra
- Torsionale C [Nm/m] applicata attorno all'asse x del sistema di coordinate locale della piastra
Gli utenti possono selezionare qualsiasi piastra di un elemento, la lunghezza del vincolo, il tipo (continuo o discreto con passo impostato) e le rigidezze laterale e torsionale.
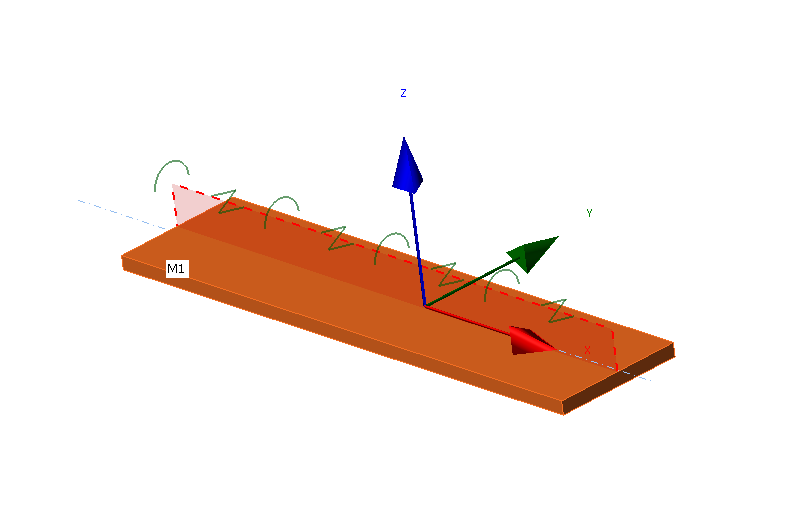
Sistema di coordinate locale di una piastra con LTR applicato
I nodi degli elementi finiti sono collegati lungo la larghezza della piastra da elementi a corpo rigido di tipo 3 (RBE3) a un punto sull'asse longitudinale della piastra. La rigidezza torsionale è applicata in questo punto da un elemento speciale con una sola rigidezza, la rotazione attorno all'asse x. Questo punto è anche collegato da altri due RBE3 con un elemento speciale tra di essi con una sola rigidezza, lo spostamento nell'asse y.
La rigidezza laterale è impostata dall'utente come libera, rigida o con rigidezza definita. La rigidezza rigida è sufficientemente elevata, impostata come 1000 volte la rigidezza a taglio della piastra. La rigidezza \(S\) è impostata per unità di lunghezza (un metro) con un'unità di forza [N]. La rigidezza di un elemento \(S_i\) ha un'unità di forza divisa per unità di lunghezza [N/m] ed è quindi:
\[ S_i = \frac{S}{s_d} \]
dove:
- \(s_d\) – distanza tra due punti [m]
Per il tipo discreto, il passo è impostato direttamente dall'utente. Per il tipo continuo, il passo è sufficientemente piccolo da non influenzare il comportamento della piastra.
Analogamente, la rigidezza torsionale è impostata dall'utente come libera, rigida o con rigidezza definita. La rigidezza rigida è sufficientemente elevata, impostata come 1 000 volte la rigidezza flessionale della piastra. La rigidezza \(C\) è impostata per unità di lunghezza (un metro) con un'unità di momento flettente divisa per unità di lunghezza [Nm/m]. La rigidezza di un elemento \(C_i\) ha un'unità di momento flettente divisa per il quadrato dell'unità di lunghezza [Nm/m2] ed è quindi:
\[ C_i = \frac{C}{s_d} \]
Per una migliore comprensione dei valori di rigidezza, si veda il documento European Recommendations on the Stabilization of Steel Structures by Sandwich Panels.
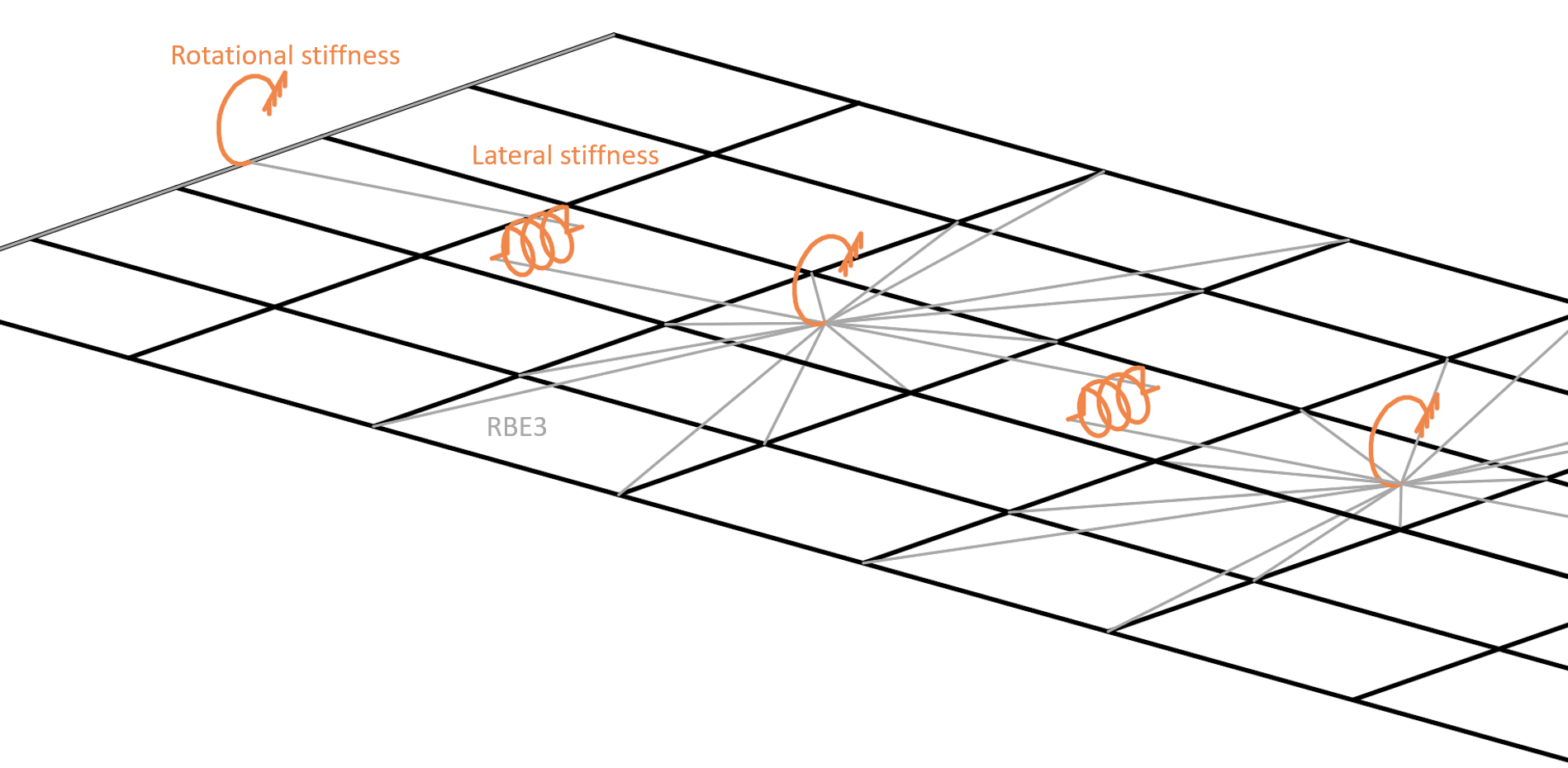
Gli elementi finiti nascosti e gli RBE3 forniscono rigidezza laterale e torsionale alla piastra dell'elemento
Si noti che gli RBE3 sono solo collegamenti di interpolazione che non forniscono alcuna rigidezza propria.
Verifica
Un modello che fornisce LTR è stato verificato con il software LTBeam, che utilizza elementi a barra (1D) con sette gradi di libertà. Ciò significa che la sezione trasversale non si deforma, ma l'elemento può cogliere il ingobbamento. Il confronto è mostrato su un esempio di sezione trasversale IPE 180 in acciaio S355 con una lunghezza di 6 m. La trave è incastrata ad entrambe le estremità con un carico uniforme di 20 kN/m applicato all'ala superiore. Il software LTBeam è in grado di determinare il momento critico elastico che corrisponde al risultato dell'analisi di instabilità lineare (LBA) in IDEA StatiCa Member.
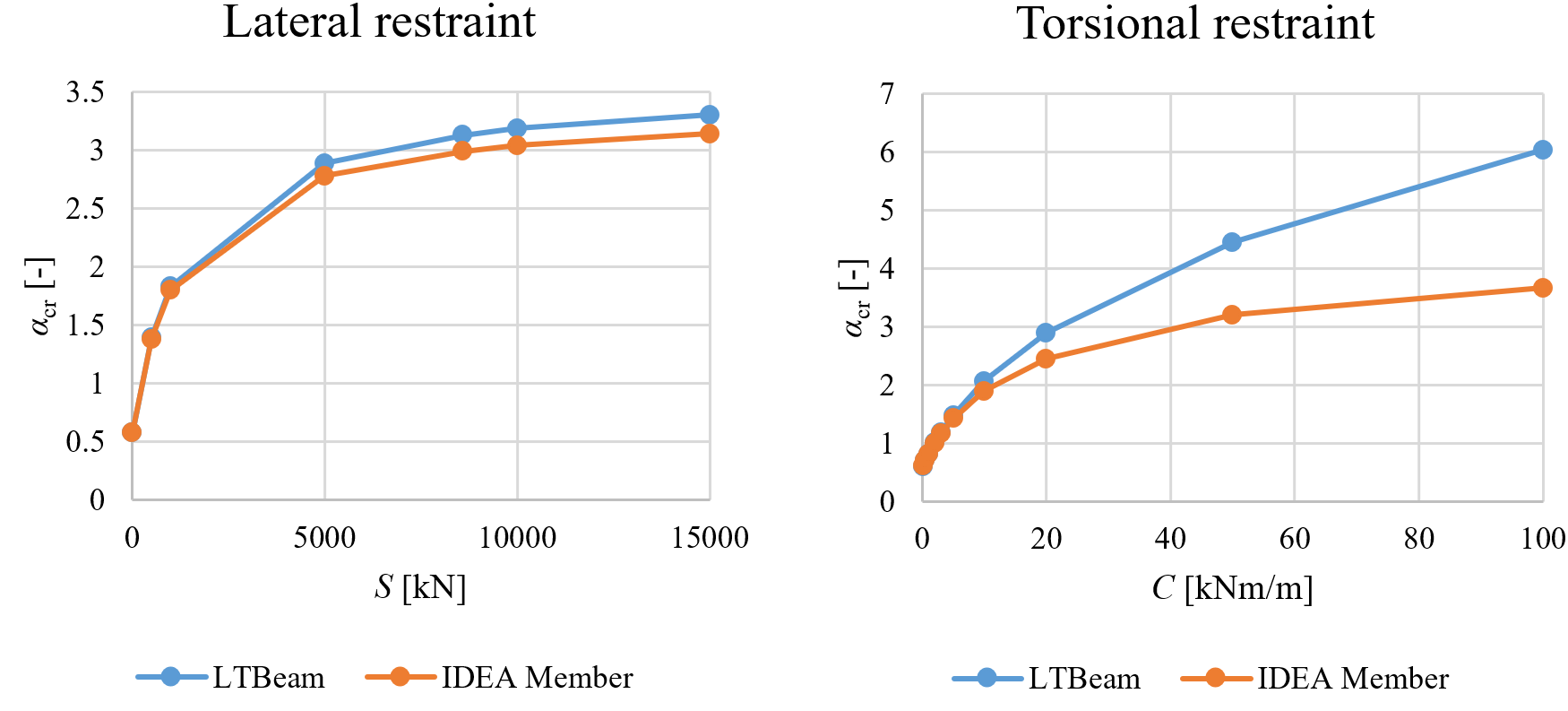
Confronto tra LTBeam e IDEA StatiCa Member per rigidezza laterale e torsionale
Il moltiplicatore del carico critico all'instabilità elastica \(\alpha_{cr}\) con rigidezza laterale è molto simile secondo entrambi i software. La rigidezza laterale limite oltre la quale l'instabilità flesso-torsionale ha un effetto fino al solo 5 % della resistenza flessionale della trave è calcolata secondo EN 1993-1-1 come Slim = 8 589 kN. Tuttavia, i risultati con il vincolo torsionale divergono a livelli più elevati di rigidezza rotazionale. Osservando la forma deformata in IDEA StatiCa Member, la differenza è causata dalla deformazione della sezione trasversale che può essere colta solo dal modello a guscio. LTBeam fornisce moltiplicatori del carico critico irrealisticamente elevati per alta rigidezza torsionale.
Per verificare questa affermazione, il modello ad elementi guscio ABAQUS è stato creato presso l'università ETH. La trave è nuovamente incastrata ad entrambe le estremità, realizzata in acciaio S355 e con una lunghezza di 6 m. È stata utilizzata la sezione trasversale IPE 240. La rigidezza torsionale limite, ovvero quella per cui l'instabilità flesso-torsionale ha un effetto fino al solo 5 % della resistenza flessionale della trave, è stata calcolata come Clim = 27,13 kNm/m. Il modello è caricato da una forza a mezzeria sull'ala superiore.
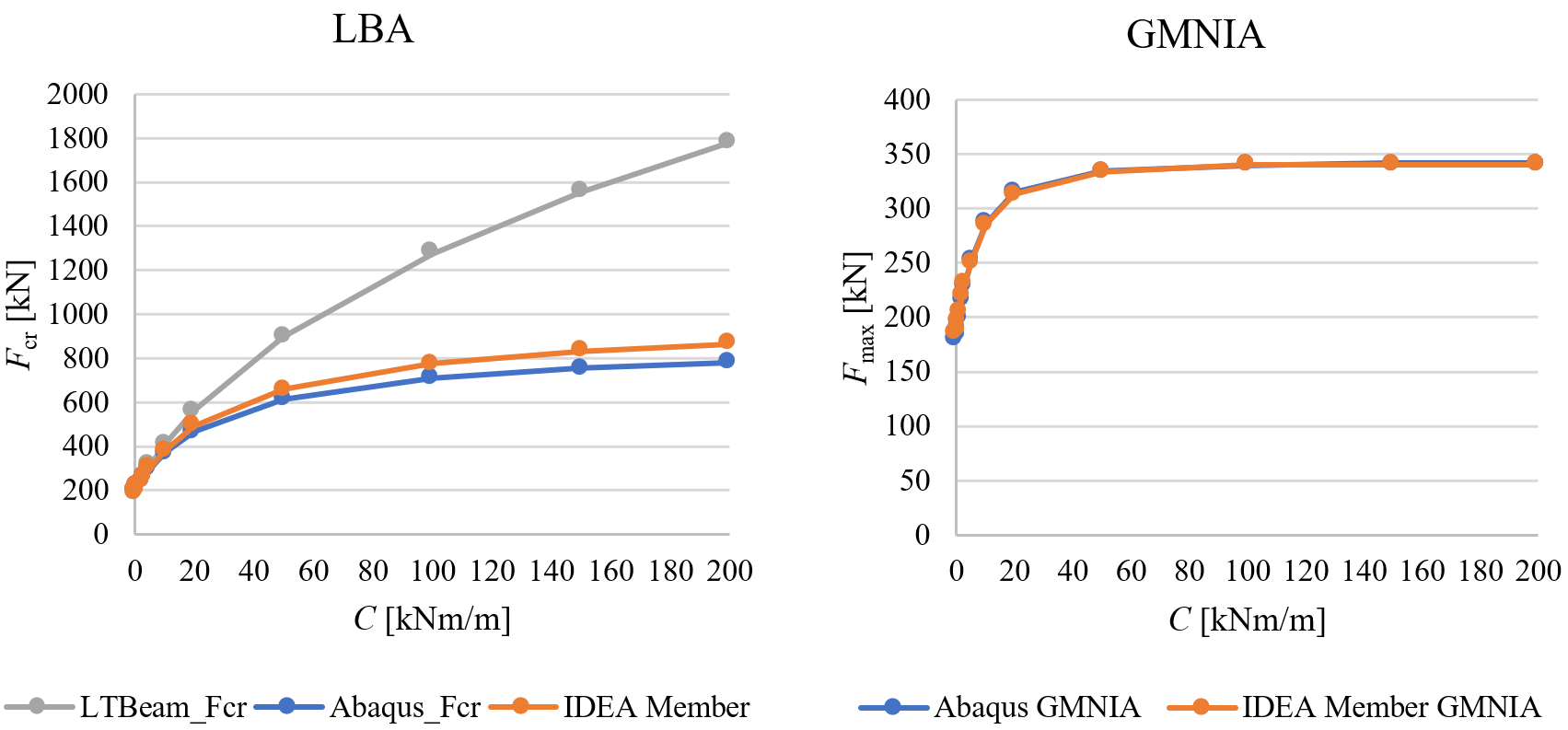
Confronto tra ABAQUS, LTBeam e IDEA StatiCa Member per la rigidezza torsionale
L'effetto della rigidezza torsionale è molto simile in entrambi i modelli realizzati con elementi guscio e LTBeam diverge. Soprattutto, le resistenze all'instabilità di ABAQUS e IDEA StatiCa Member fornite dalla GMNIA quasi coincidono – le differenze sono fino al 4 %.
Stima della rigidezza
Il vincolo LTR fornito da solai riempiti di calcestruzzo e con azione composita fornita da pioli con testa può essere assunto come rigido almeno nel caso della rigidezza laterale. Le rigidezze fornite da lamiere trapezoidali di pannelli sandwich sono molto più piccole e possono essere determinate mediante esperimenti o calcoli. Nella maggior parte dei casi, i valori di rigidezza laterale e torsionale sarebbero raccomandati dai produttori di pannelli sandwich o altri tipi di rivestimento.
Il calcolo della rigidezza laterale S [N] fornita da lamiere trapezoidali è previsto in EN 1993-1-3, Capitolo 10:
\[S=1000 \sqrt{t^3} \left ( 50+10 \sqrt[3]{b_{roof}} \right ) \frac{s}{h_w} \]
dove:
- t – spessore di progetto della lamiera trapezoidale [mm]
- broof – larghezza della copertura, ovvero per una copertura a falde è la distanza tra il colmo e la gronda [mm]
- s – distanza tra le travi [mm]
- hw – altezza del profilo della lamiera trapezoidale [mm]
La formula è valida se la lamiera trapezoidale è collegata alla trave ad ogni nervatura. Se la lamiera è collegata alla trave solo ad ogni seconda nervatura, allora S deve essere sostituita da 0,2 S.
La rigidezza laterale dei pannelli sandwich è descritta nella raccomandazione ECCS. La rigidezza degli elementi di fissaggio è essenziale:
\[S=\frac{k_v}{2B} \sum_{k=1}^{n_k}c_k^2\]
dove:
- kv – rigidezza a taglio di un elemento di fissaggio
- B – larghezza di un pannello sandwich
- nk – numero di coppie di elementi di fissaggio per pannello e appoggio
- ck – distanza tra i due elementi di fissaggio di una coppia
La rigidezza torsionale è più complessa e può essere stimata anche dalla raccomandazione ECCS. Essa comprende il contributo degli elementi di fissaggio, del pannello sandwich e della distorsione della trave. La distorsione della trave può essere trascurata poiché è già inclusa nel modello ad elementi guscio.
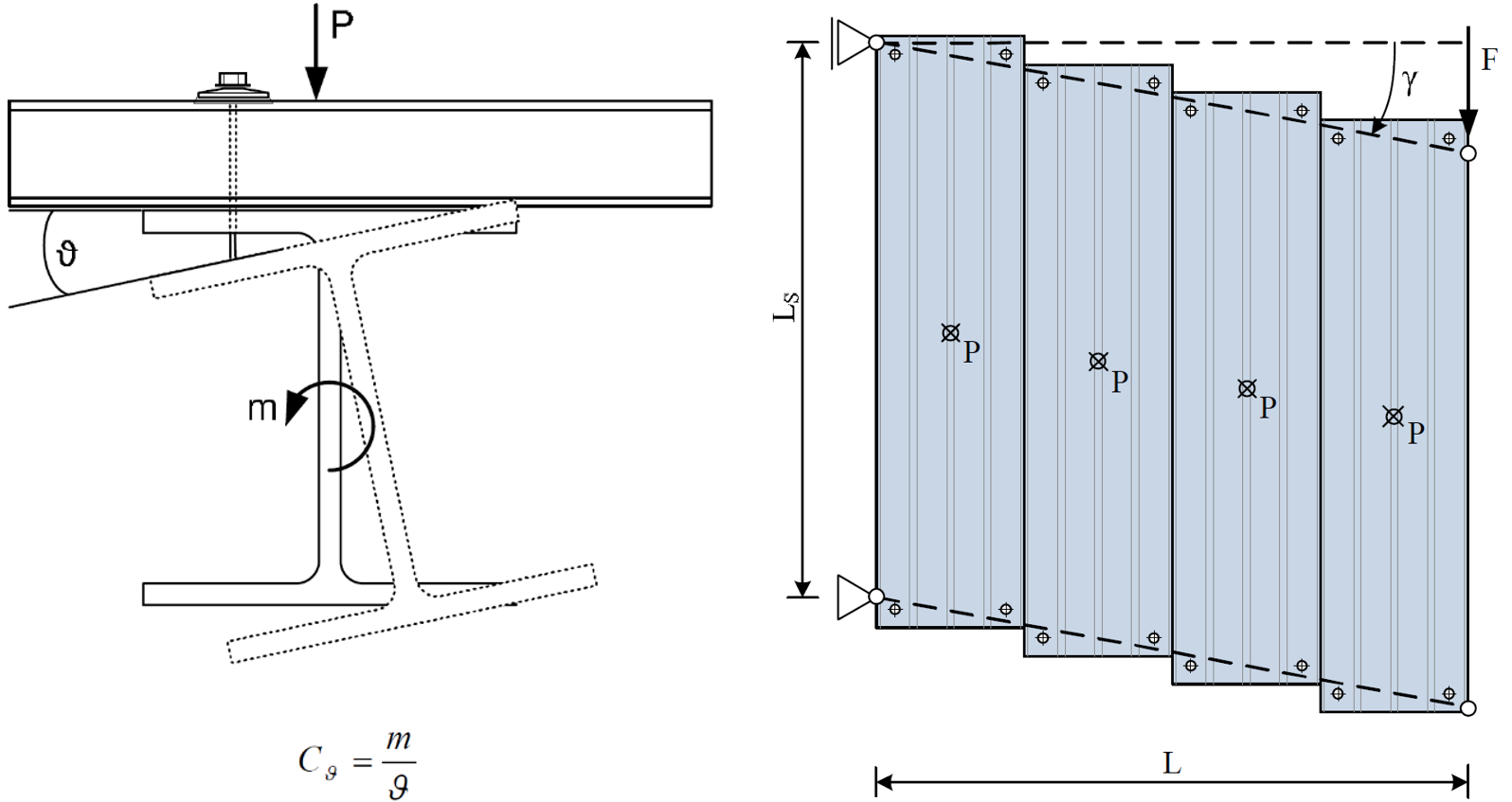
Rigidezza torsionale (a sinistra) e laterale (a destra) fornita dai pannelli sandwich (ECCS, 2014)
Nella pratica americana, il vincolo contro l'instabilità flesso-torsionale è tipicamente assunto come completo o trascurabile in base al tipo e all'orientamento del solaio. Ad esempio, la Tabella 8.1 del Manuale di Progettazione Sismica AISC identifica le condizioni di vincolo per le travi soggette a compressione assiale. Tuttavia, ove necessario, la rigidezza laterale può essere derivata dalla rigidezza del diaframma, G', calcolata in conformità con AISI S310. Denavit et al. (2020) presentano un metodo per il calcolo della rigidezza torsionale.
Riferimenti
- CTICM, LTBeam v. 1.0.11, disponibile su: https://www.cesdb.com/ltbeam.html
- Abaqus. Reference manual, versione 6.16. Simulia, Dassault Systéms. Francia, 2016.
- EN 1993-1-3: Eurocode 3: Progettazione delle strutture in acciaio – Parte 1-3: Regole generali – Regole supplementari per elementi e lastre formati a freddo, CEN, 2006.
- ECCS TC7 – Technical Working Group TWG 7.9 Sandwich Panels and Related Structures, European Recommendations on the Stabilization of Steel Structures by Sandwich Panels, 2nd edition, 2014. ISBN 978-90-6363-081-2
- Denavit, M.D.; Jacobs, W.P.; Helwig, T.A. (2020). "Continuous Bracing Requirements for Constrained-Axis Torsional Buckling," Engineering Journal, American Institute of Steel Construction, Vol. 57, pp. 69-89.
Giunti in acciaio di elementi con sezione trasversale cava
I giunti di elementi con sezione cava possono subire deformazioni significative pur essendo ancora in grado di sopportare carichi più elevati. D'altra parte, le piastre possono andare incontro a instabilità in campo anelastico, per cui è implementata un'analisi geometricamente e materialmente non lineare.
Deformazione fuori piano
Uno dei criteri per lo stato limite ultimo dei giunti di sezioni cave è la deformazione fuori piano della sezione trasversale cava. La verifica è disponibile nel software (in Impostazioni normativa come verifica della deformazione locale, attivata per impostazione predefinita per gli elementi portanti cavi). È riconosciuta dalle guide di progettazione CIDECT. I limiti sono il 3% della dimensione minore della sezione trasversale (0,03 d0 per CHS e 0,03 b0 per RHS) per lo stato limite ultimo e l'1% per lo stato limite di esercizio.
Definizione delle dimensioni della sezione trasversale per sezione circolare cava (CHS) e sezione rettangolare cava (RHS)
Diagrammi carico-deformazione tipici per giunti di sezioni cave; la curva rossa è relativa a un elemento a pareti sottili caricato a compressione, la curva verde a elementi ordinari caricati a compressione, la curva blu è ad esempio per un giunto a X caricato a trazione
Analisi geometricamente e materialmente non lineare (GMNA)
Nel caso di alcuni giunti di sezioni cave, in particolare con elevato rapporto diametro/spessore, l'analisi geometricamente lineare potrebbe non cogliere il comportamento del giunto con sufficiente precisione, e la sua resistenza al carico potrebbe essere sottostimata o sovrastimata. Si raccomanda di utilizzare un'analisi geometricamente e materialmente non lineare più avanzata per i giunti di sezioni cave, anche se il tempo di calcolo è leggermente superiore. Se nel Codice di impostazione è selezionata l'analisi GMNA per le sezioni cave, la GMNA viene utilizzata al posto dell'analisi geometricamente lineare e materialmente non lineare (MNA, utilizzata come standard in IDEA Statica Connection) per i modelli con elemento portante a sezione cava.
Nota: Se l'elemento portante non è una sezione cava, il solutore GMNA è disabilitato per l'analisi dell'intero modello di collegamento indipendentemente dalle impostazioni nel codice di impostazione (GMNA attivo o disattivo).
Deformazione della sezione trasversale all'estremità del modello a guscio
La sezione trasversale può deformarsi alle estremità del modello composto da elementi a guscio. I giunti di sezioni cave richiedono elementi relativamente lunghi – fino a 10 volte il diametro della sezione trasversale. Un superelemento condensato è posizionato oltre la parte del modello composta da elementi a guscio. Ciò consente un calcolo più rapido con la stessa precisione del modello completo composto da elementi a guscio. Il superelemento condensato ha solo proprietà del materiale elastiche, il che significa che le deformazioni plastiche dovute al modo di rottura analizzato non devono raggiungere l'estremità del modello a elementi a guscio. Per questo motivo, il modello a guscio si estende per impostazione predefinita di 1,25 volte l'altezza della sezione trasversale (modificabile nelle Impostazioni normativa) oltre l'ultima operazione di lavorazione.
Resistenza flessionale del guscio ridotta per le sezioni cave (imperfezioni)
Le resistenze al carico dei giunti di sezioni cave nelle normative sono determinate con il Metodo dei Modi di Rottura, che utilizza modelli di interpolazione ricavati da prove sperimentali e modelli numerici avanzati. La struttura reale contiene imperfezioni iniziali e tensioni residue, che non vengono catturate dai modelli a guscio in IDEA StatiCa Connection. Per ottenere una maggiore conformità con i risultati delle normative, l'influenza delle tensioni residue e delle imperfezioni iniziali è simulata riducendo la resistenza flessionale dei gusci delle sezioni cave con un elevato rapporto D/(2t).
Tipo di analisi a fatica nella progettazione strutturale
Il tipo di analisi a fatica non fornisce alcuna resistenza finale né il numero di cicli che il dettaglio può sopportare. Fornisce semplicemente gli input per ulteriori calcoli secondo le normative.
Devono essere sempre impostati almeno due casi di carico. Il primo caso di carico è quello di riferimento. Si assume come, ad esempio, il peso proprio della struttura e può contenere carichi nulli. Gli altri casi di carico simulano le azioni a fatica. La tensione nominale normale e di taglio fornita da IDEA StatiCa è l'intervallo di tensione tra l'azione a fatica, ad es. LE2, e il caso di carico di riferimento.
Ad esempio, la tensione di taglio in una determinata posizione è 50 MPa nel caso di carico di riferimento e 180 MPa in LE2. La tensione di taglio nominale mostrata in questa posizione è:
\[\tau = 180-50=130\, \textrm{MPa}\]
Si noti che non dovrebbe verificarsi alcuno snervamento delle piastre a causa delle azioni a fatica, altrimenti gli intervalli di tensione risultano distorti.
Le tensioni sono disponibili per:
- Bulloni
- Saldature
- Piastre
Bulloni
Per i bulloni, le tensioni sono determinate semplicemente dividendo la forza per l'area corrispondente:
- \(\sigma = F_t / A_s \)
- \(\tau = V / A \)
dove:
- \(F_t\) – forza di trazione nel bullone
- \(A_s\) – area della sezione resistente a trazione del bullone
- \(V\) – forza di taglio nel bullone; se sono presenti più piani di taglio, viene utilizzata la forza di taglio più elevata
- \(A\) – area del bullone resistente a taglio; area della sezione resistente a trazione se i filetti sono intercettati dal piano di taglio, altrimenti area della sezione trasversale lorda
Saldature
Le saldature in CBFEM sono composte dall'elemento di saldatura con vincoli multipunto che collegano le piastre. La distribuzione delle tensioni nella saldatura è perturbata dai vincoli e, pertanto, le tensioni sono ricavate da una sezione situata a 1,5 volte la dimensione del lato del cordone dal piede della saldatura. Tre sezioni vengono create per una saldatura a cordone d'angolo su entrambi i lati. Due sezioni appartengono alla stessa categoria di dettaglio e viene mostrata solo quella più sollecitata. Vengono mostrate la tensione normale massima e la corrispondente tensione di taglio nella stessa posizione, nonché la tensione di taglio massima e la corrispondente tensione normale nella stessa posizione.
Vedere anche i miglioramenti dell'analisi a fatica nella versione 22.0.
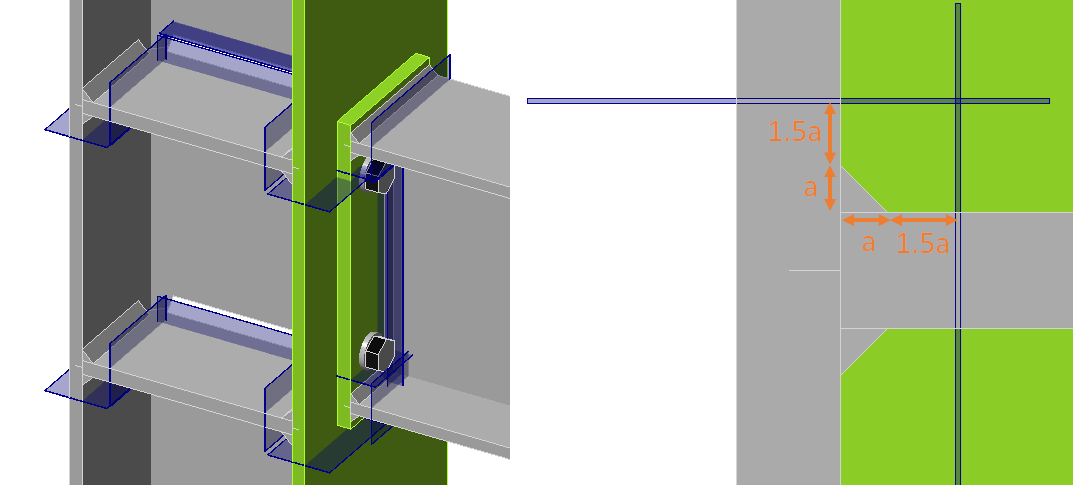
Piastre
La tensione nelle piastre può essere visualizzata creando una sezione definita dall'utente tramite un'operazione di lavorazione con piano di lavoro (Workplane). Nella figura seguente, sono stati creati due piani di lavoro per visualizzare le tensioni attorno ai fori dei bulloni. Vengono mostrate la tensione normale massima e la corrispondente tensione di taglio nella stessa posizione, nonché la tensione di taglio massima e la corrispondente tensione normale nella stessa posizione.
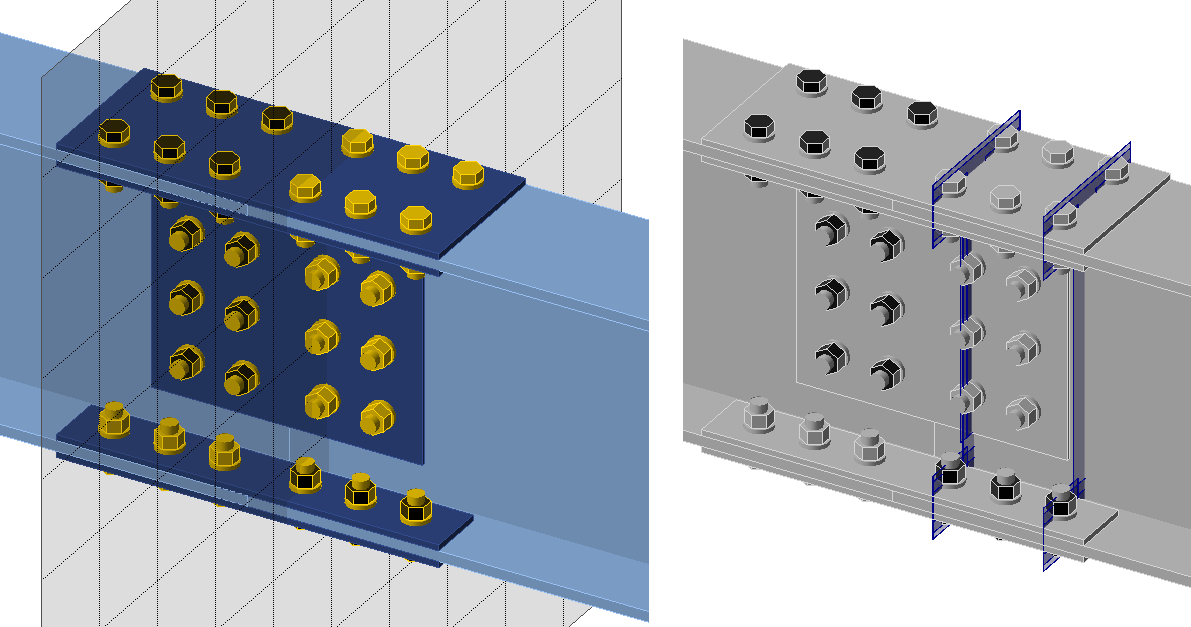
Progettazione antincendio
Temperatura
In IDEA StatiCa Member, l'utente imposta una temperatura per l'intero modello. Tutte le entità nel modello hanno una temperatura impostata.
In IDEA StatiCa Connection, l'utente può impostare la temperatura per ciascun elemento o piastra separatamente. La temperatura degli elementi di collegamento - bulloni e saldature - si assume pari a quella della piastra di collegamento più calda.
La temperatura degli elementi e delle piastre nei collegamenti può essere determinata secondo EN 1993-1-2 – Cl. 4.2.5 Sviluppo della temperatura dell'acciaio e D.3 Temperatura dei giunti in caso di incendio. Le proprietà termiche dei componenti in acciaio sono tratte da EN 1993-1-2:
- Calore specifico – Cl. 3.4.1.2
- Conducibilità termica – Cl. 3.4.1.3
Si noti che la dilatazione termica non viene utilizzata in IDEA StatiCa Steel, poiché aggiungerebbe forze fortemente dipendenti dalle condizioni al contorno. Si incoraggia gli utenti ad aggiungere autonomamente le forze derivanti dalla dilatazione termica agli effetti del carico.
Degradazione del materiale
La degradazione del materiale delle piastre in acciaio è disponibile secondo tre normative:
- EN 1993-1-2 – Tabella 3.1
- AISC 360-16 – Tabella A-4.2.1
- CSA S16-14 – Tabella K.1
Il diagramma multilineare del materiale viene utilizzato per le piastre in acciaio con sei punti secondo EN 1993-1-2 – Figura 3.1. Un esempio è mostrato per l'acciaio S355, degradazione del materiale secondo EN 1993-1-2 – Tabella 3.1, e temperatura \(\theta = 560^{\circ}\textrm{C}\). Il pendio del ramo plastico oltre la resistenza allo snervamento \(f_y\) è \(E_{a,\theta}/1000\). I fattori di riduzione per il modulo di elasticità \(k_{E,\theta}\), per il limite di proporzionalità \(k_{p,\theta}\) e per la resistenza allo snervamento \(k_{y,\theta}\) sono rispettivamente 0,426, 0,252 e 0,594. Si assume che la deformazione plastica si accumuli a partire dal limite di proporzionalità.
| Deformazione | Deformazione plastica | Tensione | |
| \(\varepsilon\) [%] | \(\varepsilon_{pl}\) [%] | \(\sigma\) [MPa] | |
| 0 | 0.00 | 0.00 | 0.0 |
| 1 | 0.10 | 0.00 | 89.5 |
| 2 | 0.25 | 0.15 | 131.4 |
| 3 | 0.50 | 0.40 | 160.5 |
| 4 | 1.00 | 0.90 | 191.3 |
| 5 | 2.00 | 1.90 | 210.9 |
| 6 | 15.00 | 14.90 | 222.5 |
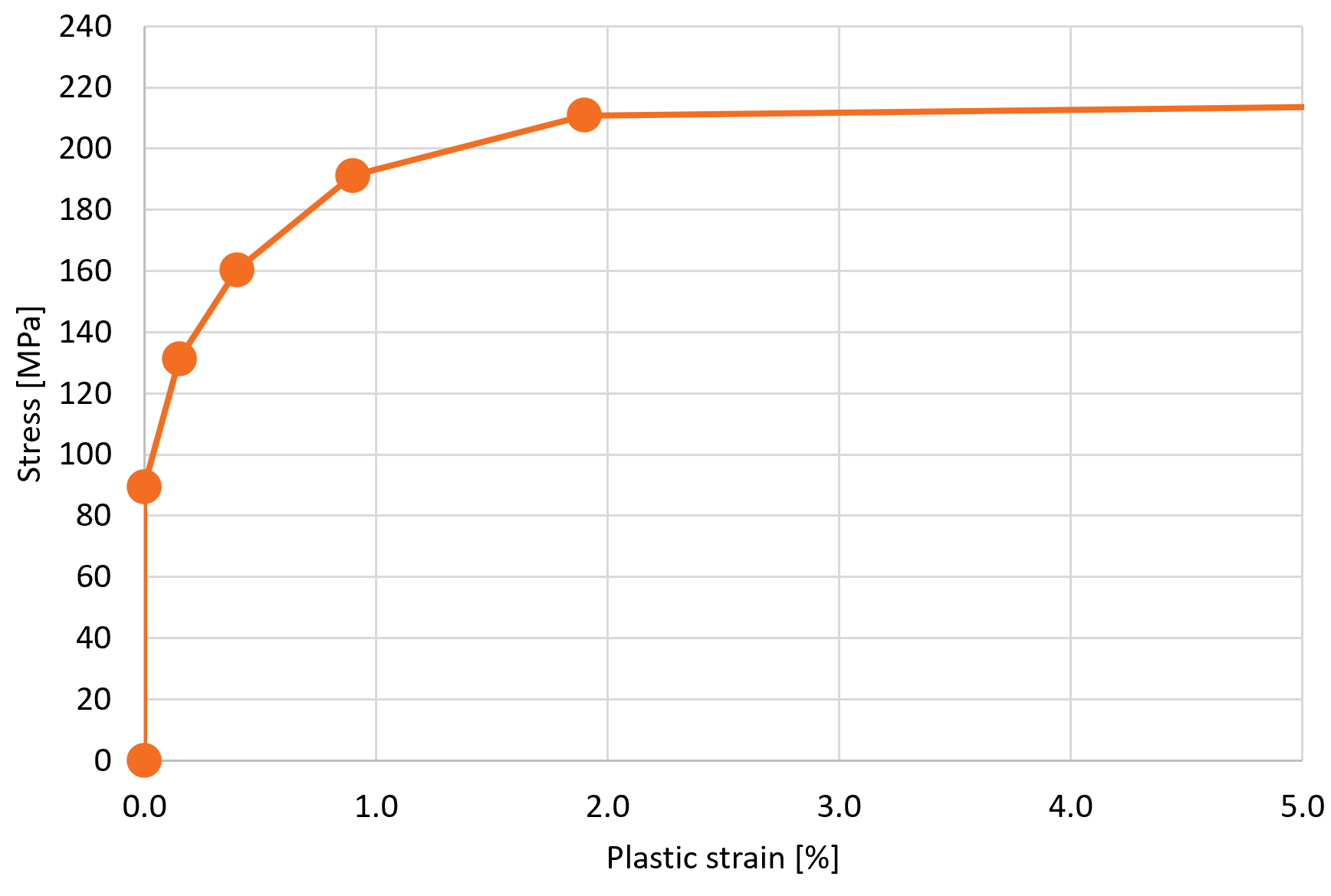
La degradazione del materiale dei bulloni è disponibile secondo tre normative:
- EN 1993-1-2 – Tabella D.1
- AISC 360-16 – Tabella A-4.2.3
- CSA S16-14 – Tabella K.3
La degradazione del materiale delle saldature è disponibile secondo una normativa:
- EN 1993-1-2 – Tabella D.1
Viene ridotta solo la resistenza di bulloni e saldature. La loro rigidezza rimane invariata rispetto alla temperatura ambiente.
La dilatazione termica viene trascurata e non è considerata in nessun modello. Se necessario, gli effetti della dilatazione termica devono essere simulati mediante carichi aggiuntivi.
Verifiche
Le piastre in acciaio vengono verificate per una deformazione plastica del 5% per impostazione predefinita.
In Eurocodice, per le verifiche di bulloni e saldature viene utilizzato un coefficiente parziale di sicurezza dedicato alla progettazione antincendio, \(\gamma_{M,fi}\). In tutte le altre normative vengono utilizzati i fattori di resistenza o di sicurezza standard. Le curve carico-deformazione e le verifiche di bulloni e saldature sono ridotte dai fattori \(k_b\) e \(k_f\) in base alla temperatura impostata.
Si assume che i bulloni precaricati slittino e vengono verificati come normali bulloni serrati a mano.
La temperatura del blocco di calcestruzzo e degli ancoraggi è sconosciuta e i componenti corrispondenti non vengono verificati nella progettazione antincendio.
Rigidezza
L'analisi di rigidezza non è attualmente disponibile per la progettazione antincendio. Si raccomanda di utilizzare l'analisi di rigidezza per la temperatura ambiente e di moltiplicare la rigidezza per il fattore di riduzione del modulo di elasticità \(k_{E,\theta}\).
Dimensionamento delle saldature
In IDEA StatiCa Connection, sono disponibili per tutti gli utenti due strategie di dimensionamento delle saldature:
- a piena resistenza
- con sovraresistenza
Per gli utenti Eurocode, sono disponibili altre due:
- a stima della capacità
- a duttilità minima
Il metodo di dimensionamento delle saldature è specificato nella finestra di dialogo Operazioni.

Quando si esegue il dimensionamento delle saldature, ogni saldatura d'angolo nel modello viene modificata in base al metodo di dimensionamento selezionato. In generale, la dimensione delle saldature aumenterà nel seguente ordine:
- A stima della capacità
- A duttilità minima
- Piena resistenza
- Con sovraresistenza
I metodi sono descritti in dettaglio di seguito.
A stima della capacità
Il dimensionamento delle saldature a stima della capacità fornisce automaticamente dimensioni delle saldature appena sufficienti a trasferire i carichi impostati.
La stima della capacità delle saldature è il primo utilizzo del machine learning in IDEA StatiCa. Al momento, è implementata solo per l'Eurocode. La resistenza della saldatura è determinata in base all'elemento di saldatura più sollecitato. Pertanto, lo sfruttamento della saldatura è fortemente non lineare. La resistenza dell'intera lunghezza è stimata da un algoritmo di machine learning basato sulla distribuzione delle tensioni lungo la lunghezza della saldatura.
Il dimensionamento delle saldature a stima della capacità richiede i risultati. La dimensione delle saldature d'angolo viene adeguata secondo la seguente formula:
\[ a_{new} = a \cdot Ut_c / Ut_{target} \]
dove:
- \(a_{new}\) – dimensione adeguata della saldatura d'angolo
- \(a\) – dimensione della saldatura d'angolo precedentemente impostata
- \(Ut_c\) – stima della capacità basata sull'algoritmo di machine learning, visibile nella verifica della saldatura
- \(Ut_{target}\) – sfruttamento obiettivo in Impostazioni → Progetto → Autoprogetto → Dimensionamento delle saldature
Il valore risultante \(a_{new}\) viene arrotondato per eccesso in base a Preferenze → Unità applicazione → Arrotondamento nuova entità → Dimensione saldatura.
Si noti che le dimensioni delle saldature sono limitate dalle regole costruttive, ad esempio la dimensione della saldatura non può essere inferiore a 3 mm (EN 1993-1-8 – 4.5.2). Queste regole costruttive vengono rispettate. Tenere inoltre presente che più saldature in IDEA StatiCa sono spesso definite da un unico valore. In questi casi, la dimensione viene impostata in base a quella più sfruttata.
È inoltre disponibile un ciclo di calcolo. Quando il metodo di dimensionamento delle saldature è impostato su stima della capacità, esso:
- Dimensiona le saldature d'angolo a piena resistenza
- Calcola il modello
- Dimensiona le saldature d'angolo a stima della capacità
- Calcola il modello

Le saldature vengono quindi impostate al di sotto o al livello dello sfruttamento obiettivo con un solo clic.
A duttilità minima
Il dimensionamento delle saldature a duttilità minima fornisce automaticamente collegamenti saldati sufficientemente resistenti da prevenire rotture fragili. La resistenza della saldatura consente la plasticizzazione iniziale della piastra, ma alla fine la saldatura si rompe.
Il requisito di duttilità minima dei giunti saldati è definito in FprEN 1993-1-8:2023 – 6.9(4). Deriva dall'allegato nazionale olandese di EN 1993-1-8, dove il rapporto fisso tra resistenza della saldatura e resistenza della piastra è 0,8. È incluso anche nei Green books del Regno Unito, ampiamente utilizzati, in particolare nei Capitoli C2 e C3. Tuttavia, il rapporto fisso è adatto solo per l'acciaio di grado S355. Nella seconda generazione dell'Eurocode, questo viene esteso a tutti i gradi di acciaio.
Questo requisito è verificato per le saldature d'angolo a doppio lato da:
\[a/t=\frac{\beta_w\gamma_{M2} f_y}{\sqrt{2} f_u \gamma_{M0} } \cdot \min \left \{1.0, 1.1\frac{f_y}{f_u} \right \}\]
dove:
- \(a\) – spessore di gola della saldatura
- \(t\) – spessore della piastra collegata per bordo
- \(\beta_w\) – fattore di correlazione della saldatura
- \(\gamma_{M2}\) – coefficiente di sicurezza per bulloni e saldature; modificabile nella configurazione normativa
- \(f_y\) – tensione di snervamento della piastra
- \(f_u\) – resistenza ultima della saldatura
- \(\gamma_{M0}\) – coefficiente di sicurezza per le piastre; modificabile nella configurazione normativa
Lo spessore di gola della saldatura d'angolo a singolo lato è il doppio rispetto a quello della saldatura d'angolo a doppio lato.
Si noti che il metodo è utile per saldature caricate trasversalmente e funziona se la piastra è collegata per tutta la sua larghezza.
A piena resistenza
Il dimensionamento delle saldature a piena resistenza fornisce automaticamente saldature più resistenti della piastra collegata. Nel calcolo si assume che le piastre siano caricate a trazione e le saldature trasversalmente, come caso peggiore per la resistenza e la duttilità della saldatura. Questa progettazione è utile per evitare rotture fragili delle saldature per carichi statici.
Questo approccio è incluso anche nei Green books del Regno Unito, ampiamente utilizzati, in particolare nel Capitolo C1.
Questo requisito è verificato per le saldature d'angolo a doppio lato da:
\[a/t=\frac{\beta_w\gamma_{M2} f_y}{\sqrt{2} f_u \gamma_{M0} }\]
dove:
- \(a\) – spessore di gola della saldatura
- \(t\) – spessore della piastra collegata per bordo
- \(\beta_w\) – fattore di correlazione della saldatura
- \(\gamma_{M2}\) – coefficiente di sicurezza per bulloni e saldature; modificabile nella configurazione normativa
- \(f_y\) – tensione di snervamento della piastra
- \(f_u\) – resistenza ultima della saldatura
- \(\gamma_{M0}\) – coefficiente di sicurezza per le piastre; modificabile nella configurazione normativa
Si noti che il metodo è utile per saldature caricate trasversalmente e funziona se la piastra è collegata per tutta la sua larghezza.
Con sovraresistenza
Il dimensionamento delle saldature con sovraresistenza fornisce automaticamente saldature molto più resistenti della piastra collegata. Il fattore di sovraresistenza è specificato in Impostazioni → Progetto → Autoprogetto → Dimensionamento delle saldature. Il valore predefinito di 1,4 è tratto da EN 1993-1-8 – 6.2.3 (5) per la formazione di una cerniera plastica.

Nel calcolo si assume che le piastre siano caricate a trazione e le saldature trasversalmente, come caso peggiore per la resistenza e la duttilità della saldatura. Questa progettazione è utile per evitare rotture fragili delle saldature in caso di progettazione plastica o carichi ciclici. Si noti che una grande dimensione della saldatura non garantisce automaticamente un'elevata duttilità. Al contrario, può portare a tensioni residue eccessive e deformazioni causate dalla contrazione della saldatura.
Questo requisito è verificato per le saldature d'angolo a doppio lato da:
\[a/t=\frac{\beta_w\gamma_{M2} f_y}{\sqrt{2} f_u \gamma_{M0} } \cdot f_{overstrength}\]
dove:
- \(a\) – spessore di gola della saldatura
- \(t\) – spessore della piastra collegata per bordo
- \(\beta_w\) – fattore di correlazione della saldatura
- \(\gamma_{M2}\) – coefficiente di sicurezza per bulloni e saldature; modificabile nella configurazione normativa
- \(f_y\) – tensione di snervamento della piastra
- \(f_u\) – resistenza ultima della saldatura
- \(\gamma_{M0}\) – coefficiente di sicurezza per le piastre; modificabile nella configurazione normativa
- \(f_{overstrength}\) – fattore di sovraresistenza specificato in Impostazioni → Progetto → Autoprogetto → Dimensionamento delle saldature
Si noti che il metodo è utile per saldature caricate trasversalmente e funziona se la piastra è collegata per tutta la sua larghezza.