Việc cẩu lắp các dầm bê tông dự ứng lực dài là giai đoạn thi công đầu tiên mà trong đó ổn định có thể bị mất do cơ chế gọi là oằn xoắn ngang. Về phía nhà thiết kế, các cấu kiện thường được kiểm tra ổn định ngang trên kết cấu hoàn chỉnh, điều này không phải lúc nào cũng là điều kiện bất lợi nhất, đặc biệt vì các dầm thường được ổn định bởi các cấu kiện ngang, sàn hoặc mái. Các vấn đề về ổn định trong quá trình thi công được để lại cho nhà sản xuất và nhà thầu. Các công thức oằn ngang có trong nhiều sách giáo khoa không đủ tổng quát cho nhu cầu hiện nay và do đó không đáp ứng được yêu cầu của nhà sản xuất hiện đại, những người đang bị thúc ép, đặc biệt bởi thời gian và giá vật liệu.
Trong bài báo kiểm chứng này, chúng tôi so sánh kết quả từ IDEA StatiCa Beam và mô-đun tính toán ổn định ngang của nó với tính toán giải tích được trình bày bởi Robert F. Mast 1989 [1] và Robert F. Mast 1993 [2]. Trong phần đầu của bài viết, chúng tôi giới thiệu ngắn gọn phương pháp giải tích và trình bày một ví dụ tính toán đầy đủ cho một trường hợp tải trọng, bao gồm tất cả các công thức và tính toán trung gian. Sau đó chúng tôi so sánh kết quả này với kết quả từ ứng dụng và cuối cùng đưa ra tóm tắt về một số tình huống thiết kế.
Lý thuyết cơ bản về cân bằng lăn
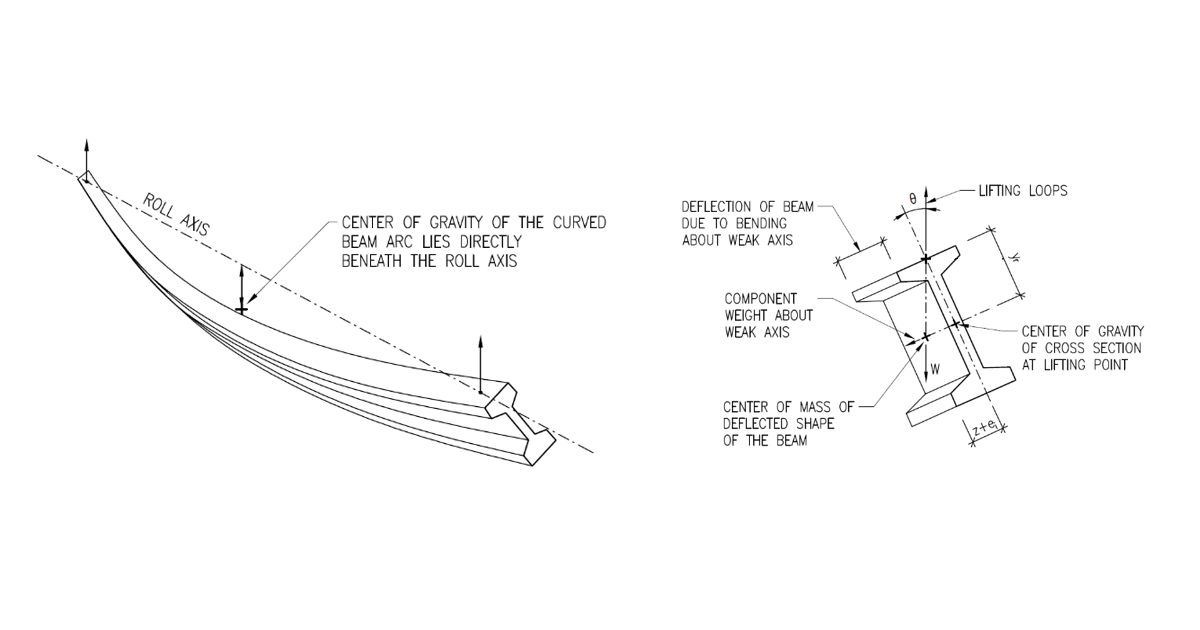
Khi một dầm được treo từ các gối tựa linh hoạt như vòng cẩu, nó có thể tự do lăn. Tâm quay là điểm mà tại đó gối tựa linh hoạt nối với vật thể cứng. Một đường thẳng đi qua tâm quay tại mỗi gối tựa tạo thành trục lăn. Độ lệch tâm ban đầu ei và độ lệch của các khớp sẽ luôn đặt trọng tâm lệch nhẹ so với trục lăn. Điều này khiến dầm nghiêng quanh trục lăn một góc nhỏ θi.
\[\theta_{i}=tan\left(\frac{e_{i}}{y_{r}}\right)≈\frac{e_{i}}{y_{r}}\]
Sự nghiêng nhỏ này khiến thành phần trọng lượng dầm W sinθi tác dụng theo phương trục yếu. Dầm sau đó bị uốn, làm dịch chuyển thêm trọng tâm của khối lượng dầm. Điều này gây ra sự tăng góc lăn θ, làm tăng tải trọng ngang cũng như độ võng. Quá trình này tiếp tục cho đến khi đạt được cân bằng tại góc θ lớn hơn một chút so với θi, hoặc cho đến khi độ võng ngang đủ lớn để phá hủy dầm.
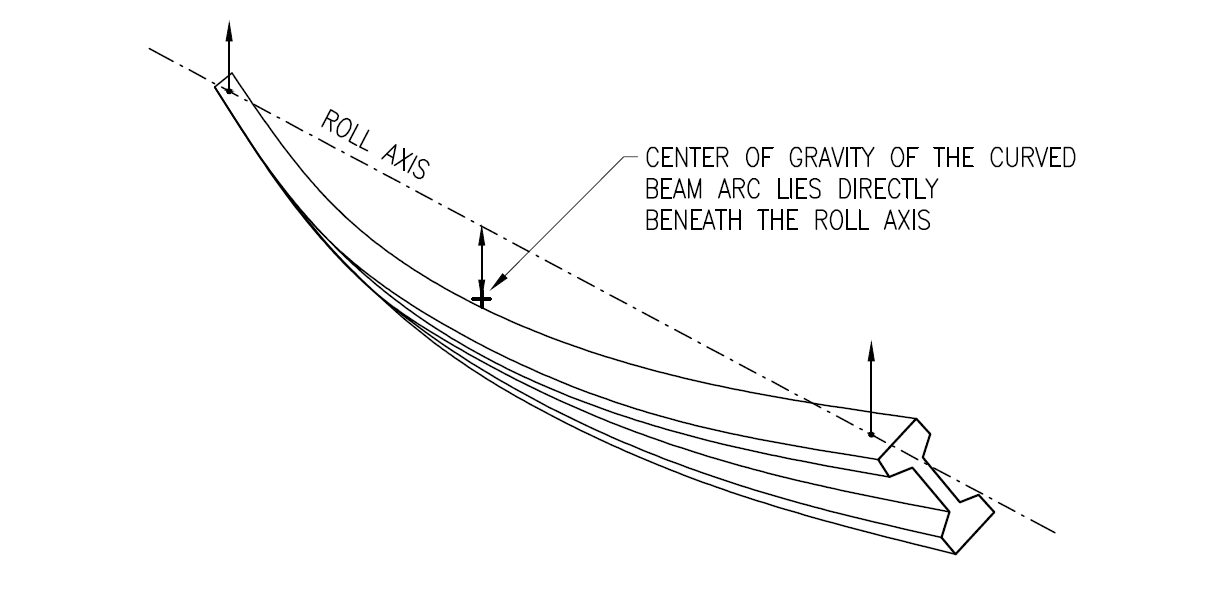
\[ \textsf{\textit{\footnotesize{Fig. 1\qquad Beam free to roll and deflect laterally – perspective}}}\]
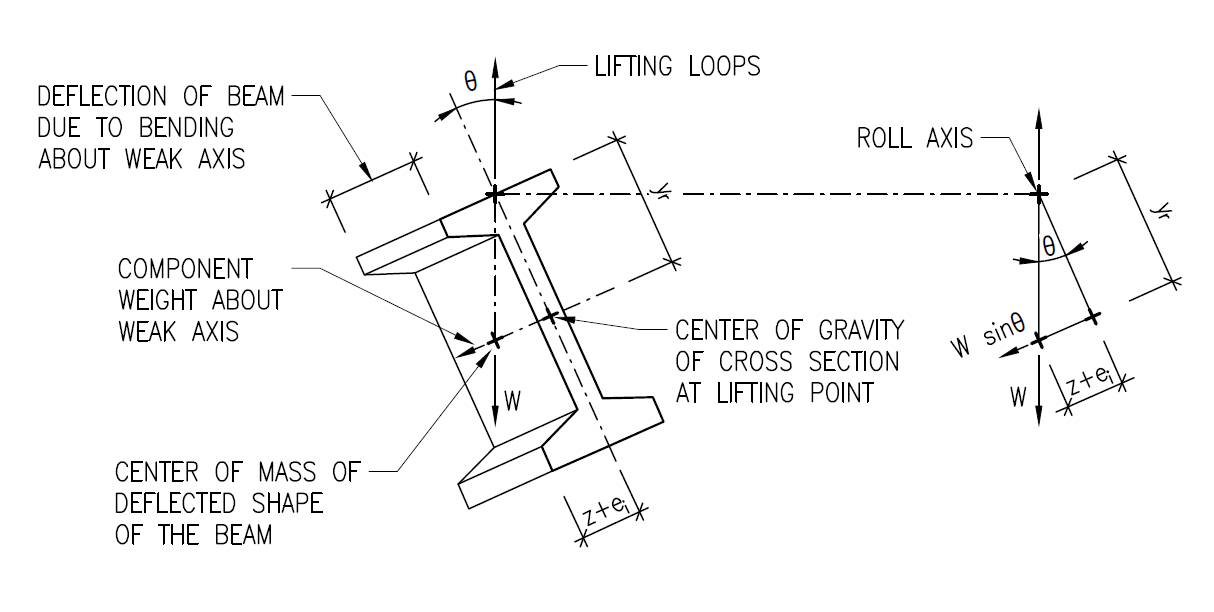
\[ \textsf{\textit{\footnotesize{Fig. 2\qquad Beam free to roll and deflect laterally – end view and equilibrium diagram}}}\]
Thành phần trọng lượng bản thân tác dụng quanh trục yếu W sinθi đã gây ra độ võng ngang bổ sung z của trọng tâm. Để tìm góc cân bằng θ, cần phải tìm z, nhưng z được xác định bởi thành phần trọng lượng W sinθ, mà bản thân nó phụ thuộc vào θ.
Bài toán có thể được giải bằng cách trước tiên tính toán độ võng lý thuyết (giả định) z0 của trọng tâm với toàn bộ trọng lượng tác dụng quanh trục yếu. Sau đó, vì thành phần trục yếu là W sinθ, z có thể được tìm thấy là z=z0 sinθ. Độ võng giữa nhịp của dầm đơn giản chịu tải phân bố đều có thể được tính bằng công thức quen thuộc:
\[\beta_{y}=\frac{5}{384}\frac{wl^{4}}{EI_{y}}\]
Nhưng βy là độ võng lớn nhất của cung dầm, và chúng ta cần z0, là khoảng cách của trọng tâm của cung dầm bị võng. z0 xấp xỉ bằng 2/3 của βy. Chính xác hơn:
\[z_{0}=\frac{1}{120}\frac{wl^{4}}{EI_{y}}=0.64\beta_{y}\]
Việc dẫn xuất công thức này có thể tìm thấy trong [1] Phụ lục F. Phương trình cân bằng sau đó có thể được viết lại là:
\[tan\theta=\frac{z_{0}sin\theta+e_{i}}{y_{r}}\]
Ẩn số duy nhất bây giờ là θ, có thể được tìm bằng phép xấp xỉ liên tiếp. Giả sử với các góc θ < 0.2 rad, có thể sử dụng xấp xỉ θ ≈ sinθ ≈ tanθ. Phương trình cân bằng khi đó đơn giản hóa thành:
\[\theta=\frac{e_{i}}{y_{r}-z_{0}}\]
Ảnh hưởng của vị trí điểm cẩu
Đặt điểm cẩu ngay cả một khoảng cách nhỏ tính từ đầu dầm có thể cải thiện đáng kể ổn định uốn ngang. Không chỉ độ võng được giảm, xấp xỉ theo lũy thừa bốn của nhịp thực, mà z0 còn được cải thiện hơn nữa, vì trọng lượng ở các đầu nhô ra nằm ở phía đối diện của trục lăn.
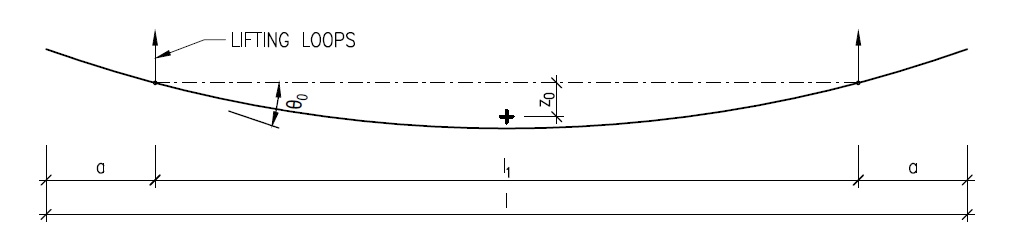
\[ \textsf{\textit{\footnotesize{Fig. 3\qquad Computation of z0 including overhanging ends}}}\]
Phương trình cho z0 được thu được bằng cách tích phân hình dạng của đường cong độ võng để tìm trọng tâm của nó.
\[z_{0}=\frac{w}{12EI_{y}l}\left( \frac{1}{10}l_{1}^{5}-a^{2}l_{1}^{3}+3a^{4}l_{1}+\frac{6}{5}a^{5} \right)\]
Ví dụ so sánh
Mục đích của bài báo này là chứng minh tính đúng đắn của các tính toán ổn định ngang trong IDEA StatiCa Beam cho trường hợp cẩu lắp dầm. Cần lưu ý rằng cùng một bộ giải phi tuyến hình học và vật liệu được sử dụng cho tất cả các tình huống thiết kế, chỉ có điều kiện biên hoặc điều kiện ban đầu được thay đổi. Làm ví dụ để so sánh kết quả với phương pháp giải tích trình bày ở trên, một dầm lăng trụ tiết diện chữ I, được căng trước tập trung sao cho lực dọc xấp xỉ Np = 1600 kN, đã được chọn. Dầm được gia cường thêm bằng cốt thép bê tông B500B như hình vẽ và được làm từ bê tông C40/50. Lực căng trước được chọn sao cho không có vết nứt nào xảy ra trong bất kỳ điều kiện nào được kiểm tra.
Biểu đồ thiết kế ứng suất - biến dạng hai đường tuyến tính được sử dụng cho phân tích trong ứng dụng, trong đó có thể xác định đơn giản mô-đun đàn hồi cho nhánh đàn hồi Ecd=fcd/εc3.
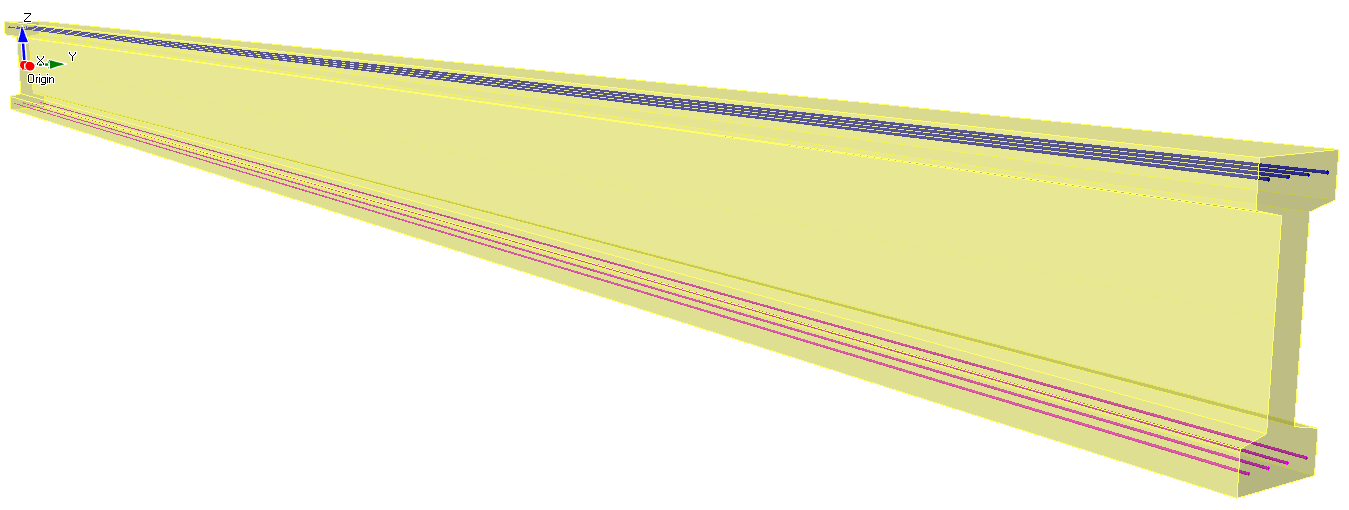
\[ \textsf{\textit{\footnotesize{Fig. 4\qquad Perspective view of the beam under examination}}}\]
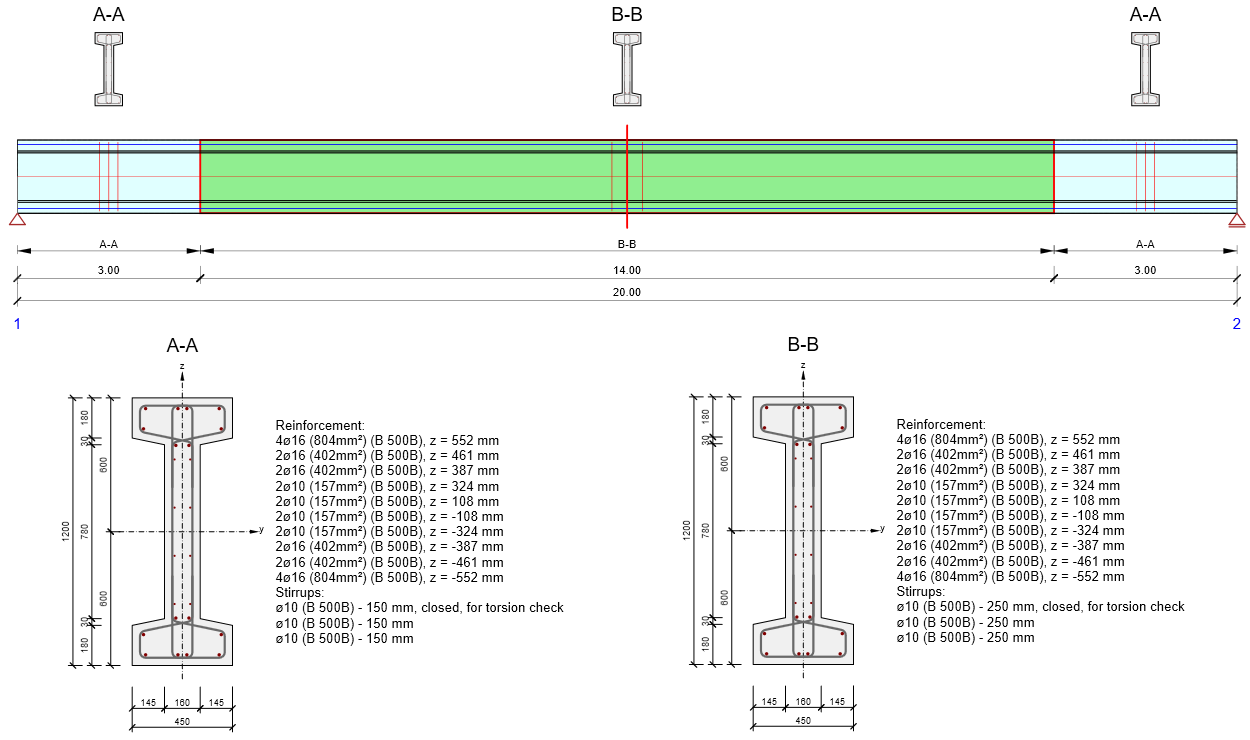
\[ \textsf{\textit{\footnotesize{Fig. 5\qquad Geometry and reinforcement}}}\]
Lưu ý rằng các trục được gán nhãn khác nhau trong Hình 5 so với phần giới thiệu lý thuyết trước đó, trong đó việc gán nhãn dựa trên [1] và [2]
Dầm sẽ được treo bằng móc có chiều cao hh = 150 mm. Điều này có nghĩa là yr = 0.5h + hh = 600 + 150 = 750 mm.
Tính toán giải tích
Nguyên tắc tính toán đã được đề cập ở đầu bài viết này. Bây giờ chúng ta sẽ xem xét chi tiết một trong các tình huống thiết kế và so sánh với kết quả từ ứng dụng. Các khớp sẽ được đặt tại a = 1.0 m và độ lệch tâm ban đầu sẽ là eig = 350 mm. Đây là độ lệch tâm hình học ban đầu của dầm bị biến dạng, được hiểu là độ võng lớn nhất của cung. Do đó, đây không phải là độ lệch tâm ban đầu của trọng tâm so với trục lăn ei được sử dụng trong các tính toán thủ công ở trên. Vì lý do thực tế, giá trị eig được sử dụng làm đầu vào cho ứng dụng IDEA StatiCa Beam. Đối với tất cả các trường hợp được xem xét, giá trị eig đã được chuyển đổi sang giá trị ei bằng phương pháp đồ họa trong ứng dụng CAD.
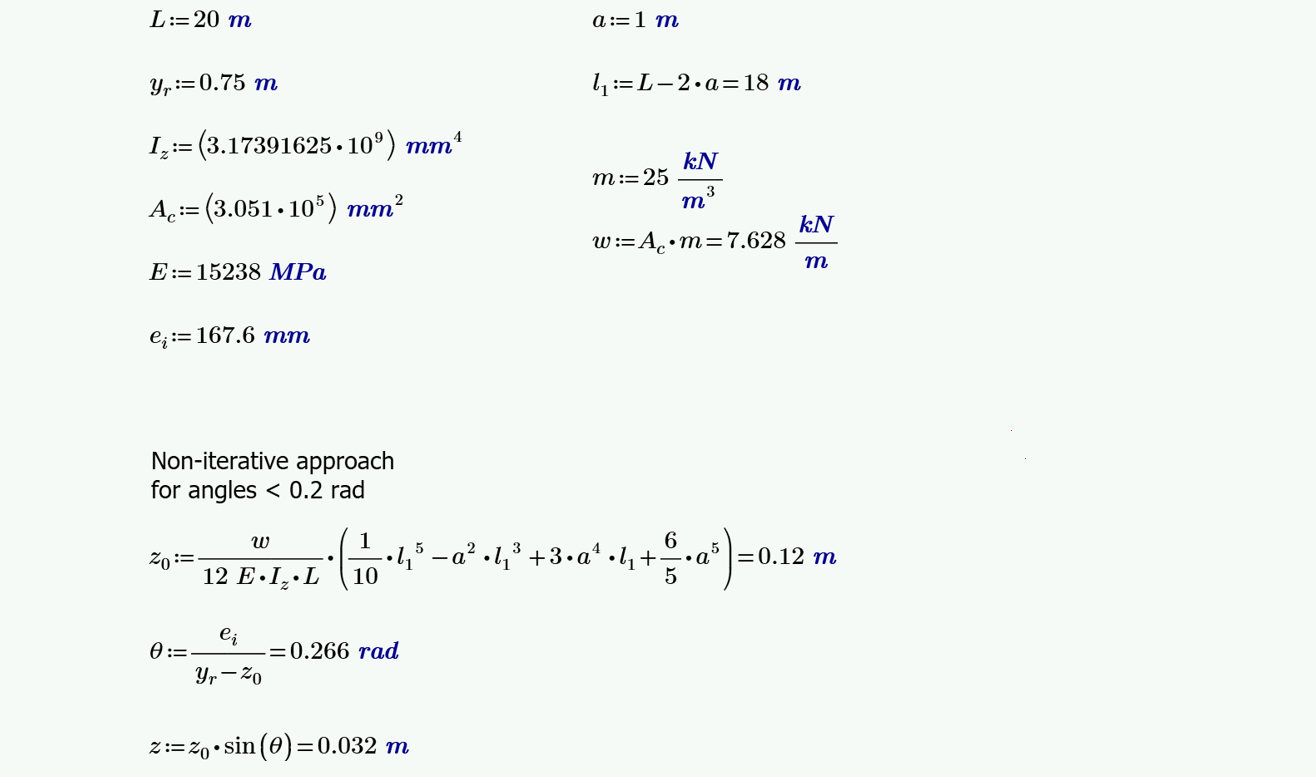
\[ \textsf{\textit{\footnotesize{Fig. 6\qquad Non-iterative approach}}}\]
Bây giờ, vì chúng ta nhận được góc θ > 0.2 rad, chúng ta sẽ kiểm tra tính đúng đắn của kết quả mà không sử dụng xấp xỉ đã đề cập ở trên θ ≈ sinθ ≈ tanθ. Sau đó chúng ta phải tiến hành tính toán lặp, trong đó trước tiên tính góc lăn ban đầu θi và tiếp tục lặp cho đến khi tính toán ổn định.
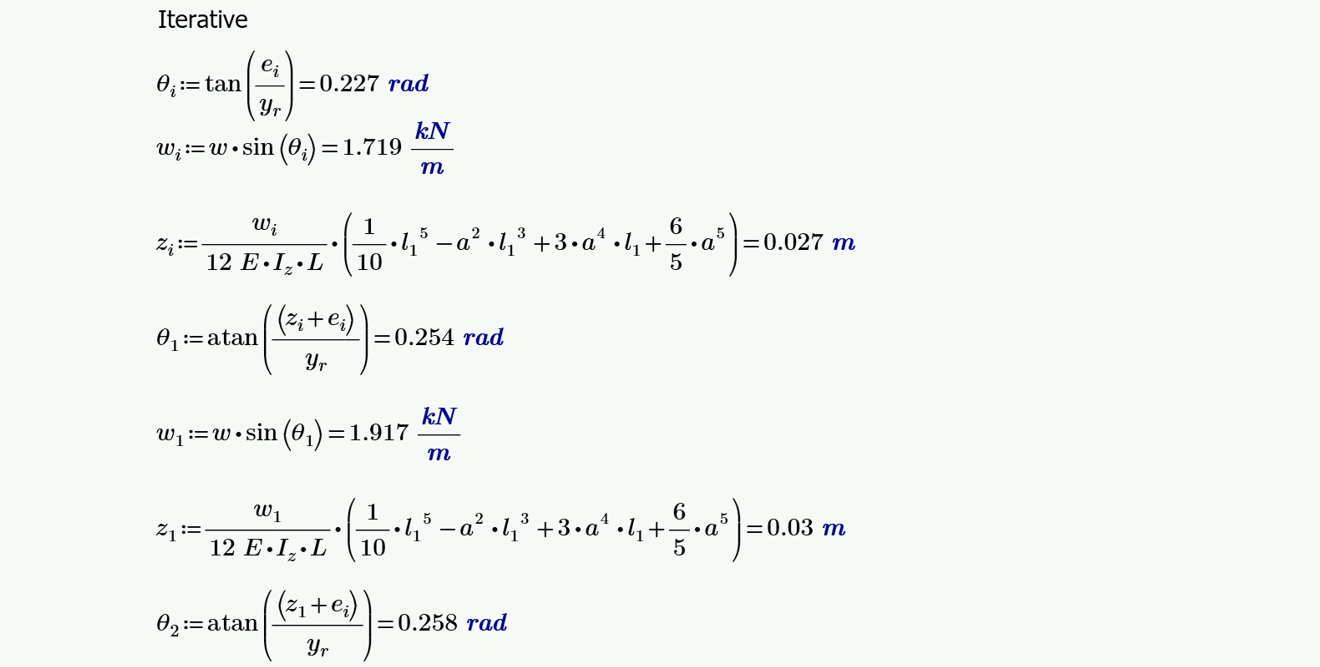
\[ \textsf{\textit{\footnotesize{Fig. 7\qquad Iterative approach}}}\]
Bây giờ, hãy xem cùng một bài toán được tính toán như thế nào trong IDEA StatiCa Beam và mô-đun Ổn định ngang của nó. Các giá trị đầu vào cho tính toán được trình bày trong Hình 8. Hệ số động cũng như các hệ số tổ hợp khác được đặt bằng 1.0.
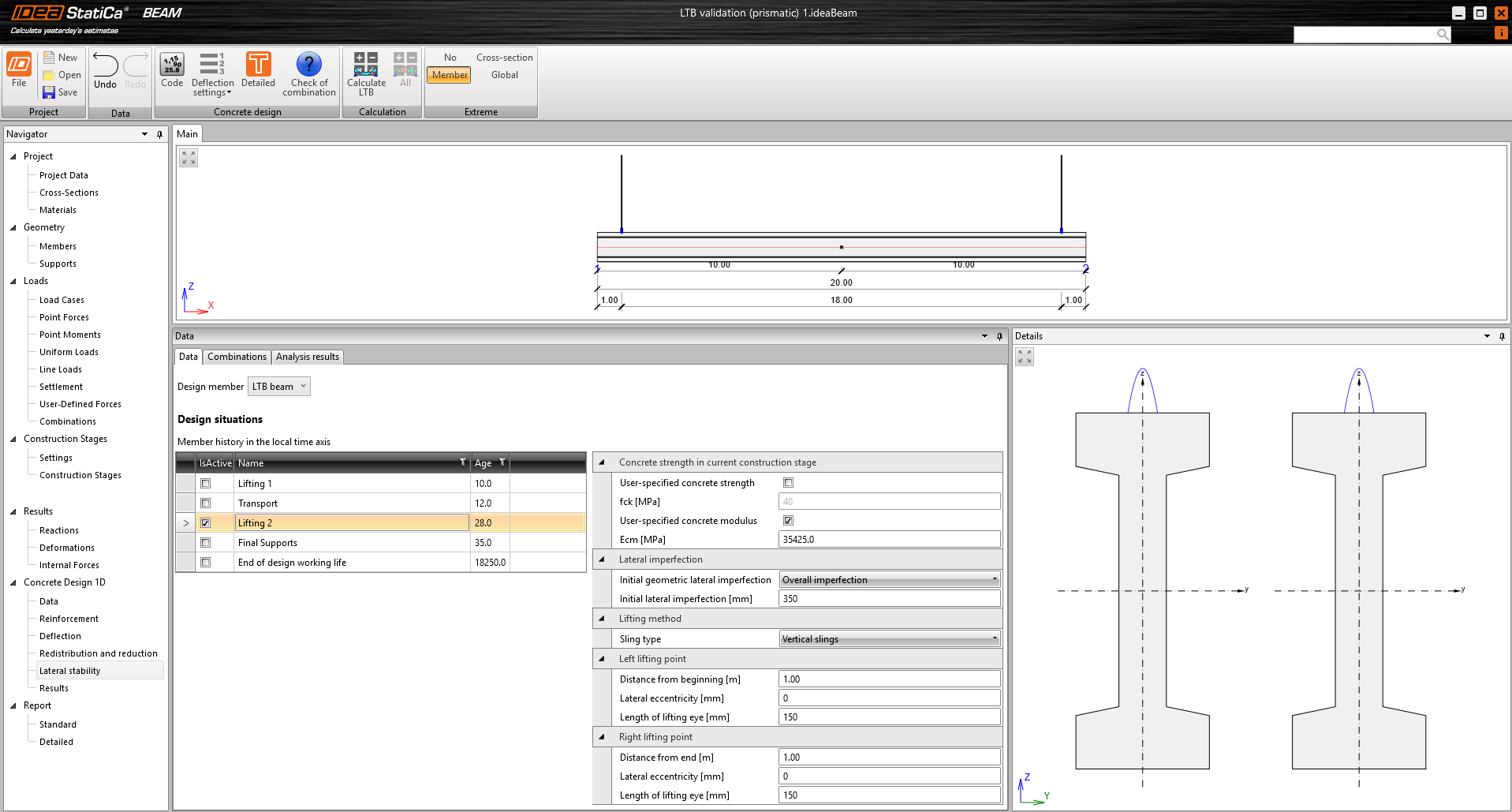
\[ \textsf{\textit{\footnotesize{Fig. 8\qquad Lateral stability data input}}}\]
Kết quả từ IDEA StatiCa Beam
Để kiểm chứng, chúng tôi so sánh giá trị góc xoay của dầm vì đây là kết quả đầu ra cơ bản của bộ giải. Các kết quả đầu ra khác, như biến dạng và nội lực, phụ thuộc trực tiếp và liên quan đến góc xoay của dầm. Trước tiên, chúng ta xem xét góc xoay ban đầu θinit = 220.4 mrad, giá trị này phải tương ứng với giá trị θi = 227 mrad từ tính toán giải tích.
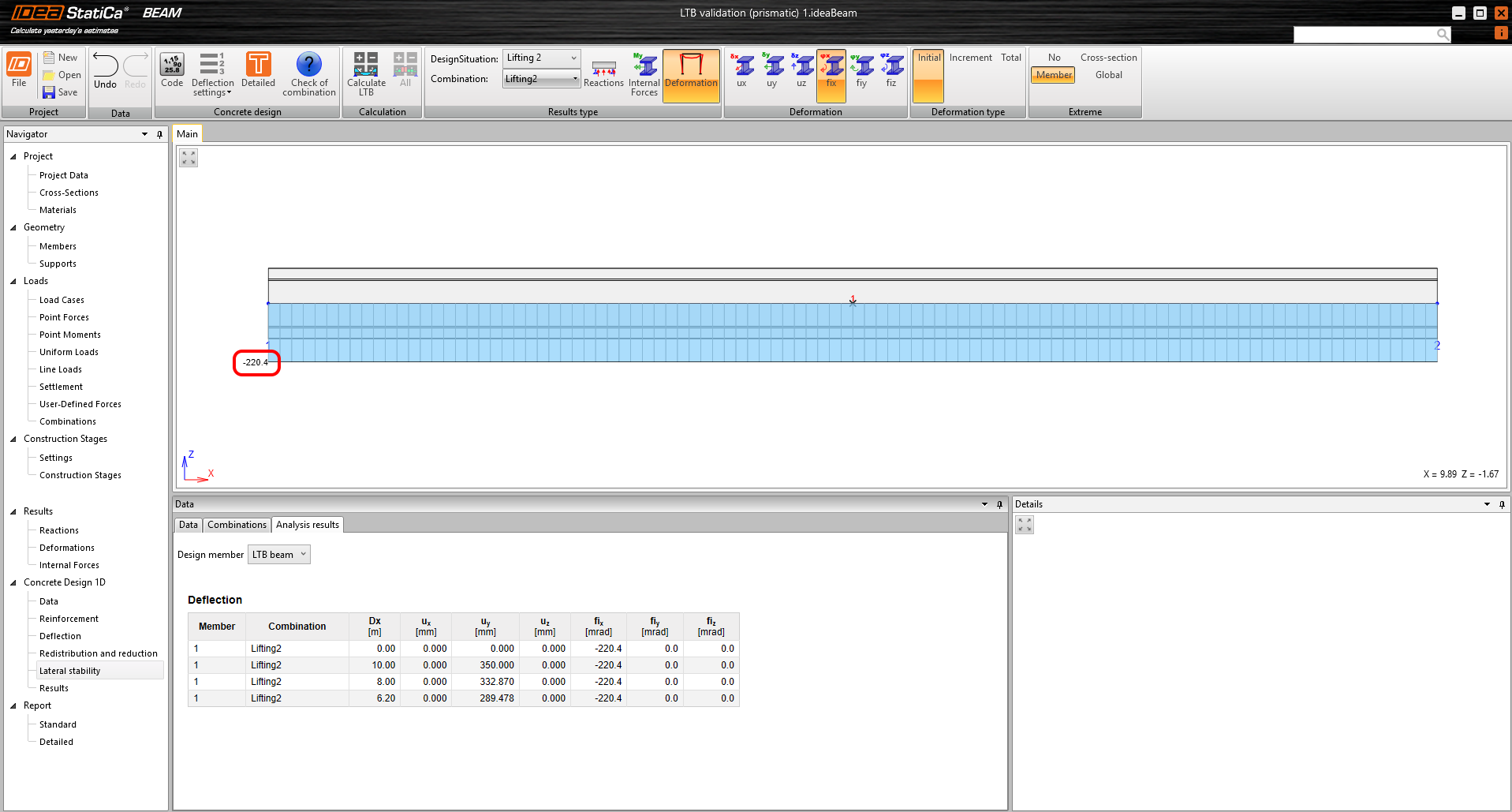
\[ \textsf{\textit{\footnotesize{Fig. 9\qquad Initial rotation}}}\]
Cuối cùng, chúng ta có thể so sánh kết quả của góc xoay tổng thể của dầm, có thể thấy trong Hình 10. Các giá trị tại cả đầu dầm và tại giữa dầm được làm nổi bật. Do đó, có thể quan sát thấy ảnh hưởng của độ cứng xoắn của dầm, điều này không được nắm bắt bởi tính toán giải tích.
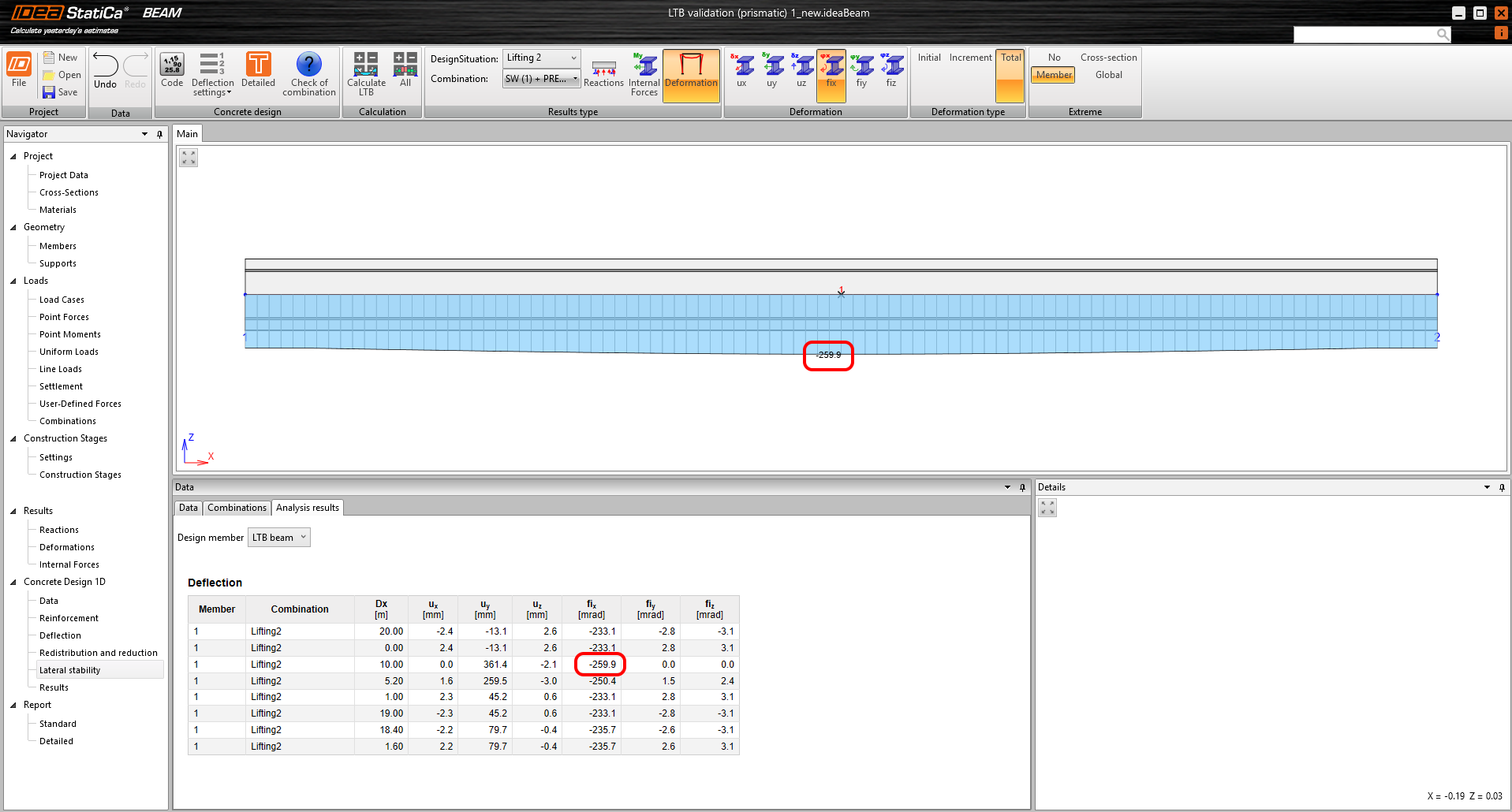
\[ \textsf{\textit{\footnotesize{Fig. 10\qquad Final rotation}}}\]
Tất cả các ví dụ
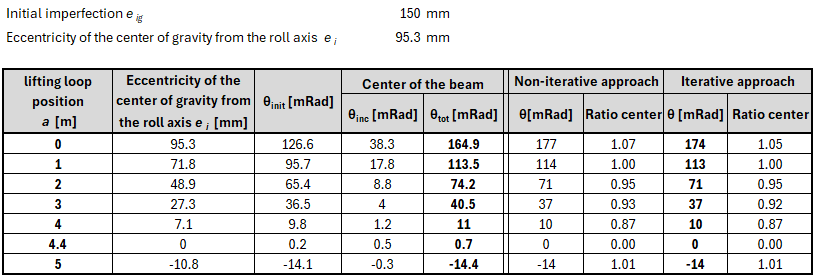
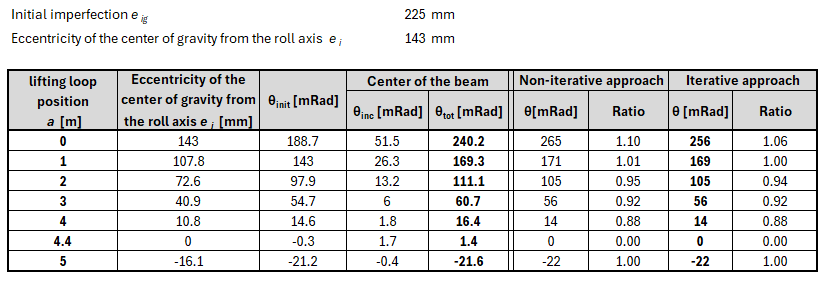
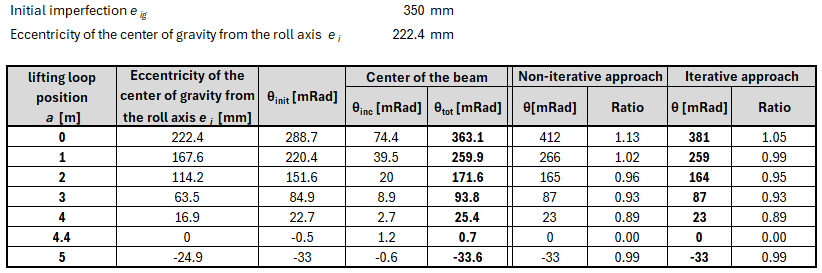
Chương này trình bày tất cả các bài toán được kiểm tra cho dầm nghiên cứu với các tổ hợp khác nhau của sai lệch ban đầu và vị trí vòng cẩu.
θinit là giá trị góc xoay ban đầu thu được từ ứng dụng và cần được so sánh với θi từ tính toán giải tích. θinc là gia số góc xoay được tính trong ứng dụng gây ra bởi góc xoay bổ sung do biến dạng ngang từ trọng lượng bản thân và θtot là góc xoay kết quả được so sánh với giá trị θ từ tính toán giải tích.
\[ \textsf{\textit{\footnotesize{Fig. 11\qquad Design situation 1}}}\]
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 2}}}\]
\[ \textsf{\textit{\footnotesize{Fig. 12\qquad Design situation 3}}}\]
Kết luận
Trong bài báo này, chúng tôi đã so sánh các tính toán giải tích về ổn định ngang của dầm trong tình huống thiết kế cẩu lắp theo [1] và [2] với phân tích phần tử hữu hạn phi tuyến vật liệu và hình học hoàn toàn được thực hiện trong IDEA StatiCa Beam. Kết quả cho thấy phân tích tinh vi hơn được chứng minh là rất chính xác, đáng tin cậy và đủ độ chính xác. Do tính tổng quát của nó, nó cũng có thể bao quát một danh mục tình huống thiết kế lớn hơn đáng kể mà không cần đơn giản hóa và các tính toán thủ công tẻ nhạt. Chúng ta cũng có thể quan sát thấy vị trí nào của các khớp mà vị trí cân bằng đã đạt được để dầm không xoay. Ở trạng thái này, các đầu nhô ra có mô-men ổn định bằng với mô-men mất ổn định từ độ võng của dầm.
Tài liệu tham khảo
[1] Mast, R. F. (1989). "Lateral Stability of Long Prestressed Concrete Beams, Part 1." PCI J. 34(1), 34–53.
[2] Mast, R. F. (1993). "Lateral Stability of Long Prestressed Concrete Beams, Part 2." PCI J., 38(1), 70–88.